


2. 国家海洋局海底科学重点实验室, 浙江 杭州 310012;
3. 国家海洋局南海环境监测中心, 广东 广州 510300
2. Key Laboratory of Submarine Geosciences, State Oceanic Administration, Hangzhou 310012, China;
3. Environment Monitoring Center of the South China Sea, South China Sea Branch of State Oceanic Administration, Guangzhou 510300, China
多波束测深技术出现于20世纪60年代[1-2]。这项技术实现了水深测量由点、线到面的飞跃[3-5],提高了人类对于海底地形地貌的认知水平,极大地推动了海洋地学的发展[6-7],尤其是直接推动了海底地貌学由定性向定量化研究的跨越式发展,并且促进了中国在高分辨率海底地貌学研究方面取得重要进展[8-12]。
与传统的单波束测深技术相比,多波束测深技术具有高精度、高分辨率和全覆盖探测等显著优点[13-15],但海量的多波束测深数据也大幅增加了后处理的难度和成本[16-17]。第一代商业多波束系统只有16个波束[18],新一代多波束系统的波束数高达上千个[19],尤其在浅水区作业时,每小时可产生上千万甚至上亿数量级的测深点[20]。因此,如何对新一代多波束测深系统探测数据进行高效处理是重点和难点技术问题。
针对多波束测深数据自动滤波处理问题,已经开展了大量的研究。如:通过建立深度和波束角阈值门限进行滤波法[21]、通过检测测深点之间的角度和梯度[22-24]、建立局部地形模型[25-29]、模拟人工处理过程[30]和基于统计学[31-33]等方法检测异常值。但这些自动处理方法主要通过一定的准则对测深数据进行分类,处理效果有时并不太理想。
CUBE算法由新罕布什尔大学的B.R.Calder博士于2000年首次提出,之后分别于2001年和2002年引入HGM模型和多水深假设追踪和干预模型,其核心算法得到了较大的改进和提升[34-35]。该算法在2001年的美国海道测量会议上首次公布[34],逐渐引起了世界各国海道测量部门的重视。在美国,NOAA下属的海岸调查办公室将该算法写入标准外业程序手册中[36-37];在英国,UKHO下属的水深数据中心研究得出,通过该算法得到的水深曲面适用于海道测量部门[38],NetSurvey海道测量公司探讨了该算法的水深假设过滤方法[39-40];在智利,海道测量办公室优化了算法中4个关键参数,并将其应用到多波束数据处理中[41];在韩国,海事安全研究中心对比了人工处理和CUBE算法自动处理后的测深数据集,认为该算法处理多波束数据不但高效而且准确[42]。同时,国内不少专家也对CUBE算法的原理和应用做了大量研究工作[42-47]。当前,CUBE算法已被多种国际多波束数据处理软件采用[28],但尚少见国产软件采用该算法。究其原因,或许与该算法过于复杂有关,且其关键参数晦涩难懂,未能依据测区地形特征优选一组最优CUBE参数。
为进一步推动CUBE算法的底层深度研究与国产化应用,本文通过对大量国际文献的系统梳理,结合作者团队的多年实际工作经验总结,详细阐述了CUBE算法的基本原理、数学模型、关键参数和处理步骤,进而提出了一种CUBE、曲面滤波参数联合优选流程,并使用实测数据进行处理验证,表明优化后的参数可有效提升多波束数据自动处理的精度和效率。
1 CUBE算法基本原理图 1为CUBE算法的工作流程,可概括为以下8个主要步骤:

|
| 图 1 CUBE算法单格网点运算流程 Fig. 1 CUBE algorithm single grid operation flow chart |
(1) 通过HGM(Hare-Godin-Mayer)模型获得每个测深点的一阶近似测量不确定度,其基本思想[48-50]为:通过深度与原始测量(及其不确定度)之间的关系建立前向传播预测模型,最终得到测深点垂直不确定度,类似的也可得到水平不确定度。垂直和水平不确定度计算的全微分方程参见文献[44]。
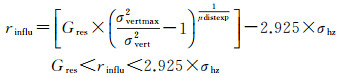
(2) 应用式(1)计算每个测深点的影响半径
 (1)
(1)
式中,rinflu为测深点的影响半径(m);Gres为格网分辨率(m);σvertmax为用户选择的IHO S-44测量等级所确定的水深不确定度[51];σvert为测深点的垂直不确定度;σhz为测深点的水平不确定度;μdistexp为不确定度随距离增加而增大的比例系数。
(3) 应用式(2)计算格网点的捕捉半径
 (2)
(2)
式中,rcapdist为捕捉半径(m);μcapdistsca为捕捉距离比例系数;Gendepth为格网点期望水深(m);μcapdistmin为最小捕捉距离(m)。μcapdistsca和μcapdistmin共同控制格网节点吸收的测深点数量,值越大,格网节点将吸收更多水深点。每个测深点需同时在以上两个半径内才能参与相应格网点的运算(图 1)。
(4) 应用式(3)将测深点3个维度上的不确定度(二维的水平不确定度和一维的垂直不确定度)融合并传播到格网点处的一维垂直不确定度
 (3)
(3)
式中,σp为测深点传播到格网点后的垂直不确定度(m);Sdist为测深点与格网点的距离;μhes为水平不确定度传播比例系数。
(5) 将测深点依次插入到队列中,按水深值大小进行排列。当队列满时,输出队列中间位置的测深点参与下一步运算,并继续向队列插入新的测深点。队列排序可有效延缓异常值输出[52],而最新版本的算法引入了单格网点多水深假设的架构,输出的测深异常值将通过构建新的水深假设与正常值孤立开来[53]。
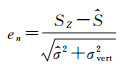
(6) 寻找当前测深点作用的格网点内最合适水深假设。存在两种情况:①如没有水深假设,则使用当前的测深点建立新的水深假设;②如已有水深假设,则计算格网点内所有水深假设与测深点之间的差值来确定最接近测深点的水深假设,称之为最适合水深假设[35, 53]。运用式(4)计算测深点和最适合水深假设的归一化差值
 (4)
(4)
式中,en为归一化差值;SZ为测深点水深(m);

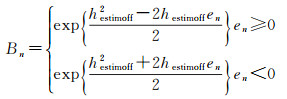
应用式(5)计算贝叶斯因子Bn
 (5)
(5)
式中,Bn为贝叶斯因子;hestimoff为估计偏移值,用于描述垂直方向偏差的显著性水平。增加hestimoff的值,CUBE算法建立的水深假设将减少[53]。
将其与Bn阈值和长度阈值进行比较,如都通过,则运行卡尔曼滤波(Kalman filter)更新水深假设(图 2);如不通过,则创建新的水深假设。

|
| 图 2 Kalman滤波流程 Fig. 2 Flow chart of Kalman filtering Q为过程噪声;x(-)为当前水深估计;P(-)为当前方差估计;σp2为测深点传播到格网点后的不确定度;K为滤波增益;x(+)为更新后水深估计;P(+)为更新后方差估计;z为测深点水深值;σdilute稀释因子 |
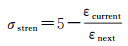
(7) 所有水深假设构建完成后,应用式(6)计算每个水深假设的假设强度σstren
 (6)
(6)
式中,σstren为水深假设强度;εcurrent为当前水深假设包含的测深点数量;εnext为序列内下一个水深假设包含的测深点数量。σstren的值越小,则水深假设的假设强度越高,越可靠。
(8) 使用消歧算法确定每个格网点的最佳水深假设[53]。
2 CUBE、曲面滤波关键参数联合优选方法将CUBE算法和曲面滤波相结合是当前主流的多波束数据处理方法。核心关键参数的选取是该方法成功实施的关键,因此需进行CUBE、曲面滤波参数联合优选。
2.1 关键参数选取μcaptdistsca(捕捉距离比例系数)、μcapdistmin(最小捕捉距离)、μhes(水平不确定度传播比例系数)和hestimoff(估计偏移值)是CUBE算法的4个核心参数,通过设置这4个参数可组合形成多组CUBE参数组。由于这些参数之间具有很强的关联性,随意设置可能导致CUBE算法出现严重错误[37, 53],因此使用当前较成熟的4组参数组(表 1):CUBE default为算法的默认参数[53];CUBE deep常用于海底特征地形较少的测区;CUBE shallow常用于海底特征地形较多的测区;CUBE NOAA与其他3组参数的最大区别在于通过减小μcaptdistsca值,并设置
| CUBE参数组类型 | μcaptdistsca | μcapdistmin | μhes | hestimoff |
| CUBE default | 5 | 0.5 | 2.95 | 4 |
| CUBE deep | 20 | 2 | 2.95 | 3 |
| CUBE shallow | 4 | 0.4 | 0.5 | 2 |
| CUBE NOAA | 0.5 |  |
1.96 | 4 |
格网分辨率也是CUBE算法的重要参数,选择原则为:在满足CUBE算法推荐的每个格网点不少于11个测深点的前提下[53],尽量提高分辨率以捕捉小地形特征。而滤波窗口μfilter则是通过设置一定大小的滤波窗口(一般为标准差的倍数),自动剔除滤波窗口外的数据。
2.2 关键参数联合优选方法如图 3所示,CUBE、曲面滤波参数联合优选流程可概括为4个主要步骤:

|
| 图 3 CUBE、曲面滤波参数联合优选流程 Fig. 3 Combined optimization flow chart of CUBE and surface filter parameters |
(1) 选取能表征整个调查区地形特征的典型地形区作为参数联合优选试验区;使用测深点密度分析法获得原始多波束数据的水深点密度,得到试验区最优格网分辨率;按表 1所示,设置4个核心参数以形成多组CUBE参数组,生成相应的多组CUBE曲面。
(2) 综合CUBE曲面的多种辅助信息(水深、假设数量、假设强度和水深不确定度等),识别并定位异常水深区域,人工干预编辑算法无法正确判断水深假设的区域,而后更新整个CUBE曲面。
(3) 以更新后准确的水深曲面为基准,设置并应用多组滤波参数μfilter,对测深点进行自动滤波,剔除位于滤波窗口外的水深点,最终得到不同CUBE、曲面滤波参数组合处理后的水深点集和水深格网。
(4) 使用传统的人工编辑法获取试验区清理后的水深数据集,并以此数据集为基准,分别使用测深点集分析法和水深格网分析法,将其与不同CUBE、曲面滤波组合处理后得到的水深数据集进行综合对比和分析,最终得到全区最优CUBE、曲面滤波联合优选参数组。
3 试验与分析 3.1 试验数据2016年7月笔者在台湾浅滩执行地形地貌与水文测量综合航次,使用多波束测深系统和ADCP进行同步观测。多波束测深系统采集设备及其测量精度如表 2所示。
| 设备类型 | 仪器型号 | 测量精度 |
| 多波束测深 | ResonSeabat 7125 | 测深精度:6 mm |
| 定位 | NavCom SF-3050 | < 0.1 m |
| 航向 | ±0.1° | |
| 升沉 | IXBlue Octans Ⅲ | ±5 cm |
| 横纵摇 | ±0.01° | |
| 潮位 | RBRduoT.D|tide | 全量程5% |
| 表层声速 | Reson SVP 70 | ±0.05 m/s |
| 声速剖面 | RBR concerto C.T.D | ±0.5 m/s |
数据在采集过程中已完成安装误差改正和实时声速改正,并在后期进行了潮位改正。图 4为使用人工编辑处理法获得的海底地形图。该区域水深15~40 m,平均水深28 m,其西侧发育有典型的多尺度沙波地貌。测线间距约110 m,由于该区水深变化剧烈,导致沙波波峰处出现由于条带覆盖宽度不够而产生的数据空白区。在该研究区内选取典型地形区作为验证本文所述关键参数联合优选方法的试验区(图 4红框区)。

|
| 图 4 台湾浅滩研究区测线分布及海底地形 Fig. 4 Trackline distribution and seafloor topographic map of Taiwan Banks |
3.2 参数联合优选结果
曲面测深点密度分析表明,格网分辨率为1 m时,99.5%的格网点满足最小水深点数量阈值要求(图 5)。因此,设置试验区最优格网分辨率为1 m。

|
| 图 5 网格测深点密度分析 Fig. 5 Density analysis of grid sounding points |
表 3总结了不同CUBE、滤波参数组合对典型地形区数据处理效果的影响,测深点集分析(S.A.)和水深格网分析(G.A.)结果具有较好的对应关系。当MACA+MRCR值较大、MRCA+MRCR值和N.D.值较小时(各缩写词含义见表 3注释),表明该组参数处理效果与人工编辑处理效果具有很好的一致性,即该组参数适用于该地形区。表 3中第1—3行显示,使用相同的CUBE参数和不同的滤波参数对最终数据的处理效果具有一定影响:当滤波窗口较小(1.5×STD)时,部分有效测深点被滤波窗口剔除,MACR值增大;而当滤波窗口设置较大(3.5×STD)时,部分测深异常值无法自动过滤,MRCA值增大。经过多次试验,得出该区最优滤波参数为2.5×STD。表 3中第2、4—6行显示,不同的CUBE参数结合相同的滤波参数对最终数据处理效果具有显著影响。综合MACA+MRCR、MRCA+MRCR和N.D.值,得出该区最优参数组为CUBE NOAA和2.5×STD。
| 序号 | CUBE参数 | μfilter | S.A./(%) | G.A./mN.D. | |||||
| MACA | MACR | MRCA | MRCR | MACA+MRCR | MRCA+MRCR | ||||
| 1 | default | 1.5×STD | 94.72 | 0.831 | 4.063 | 0.383 | 95.10 | 4.894 | 0.08 |
| 2 | default | 2.5×STD | 95.37 | 0.182 | 4.071 | 0.375 | 95.75 | 4.253 | 0.06 |
| 3 | default | 3.5×STD | 94.51 | 0.195 | 4.915 | 0.381 | 94.89 | 5.110 | 0.12 |
| 4 | deep | 2.5×STD | 94.93 | 0.742 | 3.939 | 0.385 | 95.32 | 4.681 | 0.09 |
| 5 | shallow | 2.5×STD | 95.85 | 0.114 | 3.537 | 0.502 | 96.35 | 3.651 | 0.03 |
| 6 | NOAA | 2.5×STD | 95.98 | 0.102 | 3.385 | 0.532 | 96.51 | 3.487 | 0.03 |
| 注:STD——格网点水深标准差;S.A.——测深点集分析(soundings analysis);MACA——人工编辑保留且CUBE曲面滤波保留(manual accepted and CUBE accepted);MACR——人工编辑保留且CUBE曲面滤波剔除(manual accepted and CUBE rejected);MRCA——人工编辑剔除且CUBE曲面滤波保留(manual rejected and CUBE accepted);MRCR——人工编辑剔除+CUBE——曲面滤波剔除(manual rejected and CUBE rejected);G.A.——水深格网分析(grid analysis);N.D.——在95%置信区间下的格网节点的差值。 | |||||||||
3.3 参数敏感性分析
在获取研究区最优参数后,通过固定其中任意4个参数并按一定测试步长调节余下一参数的值(表 4),获取各参数变化对算法数据处理效果的影响。如图 6所示,除μcapdistmin外,其余4个参数的变化都可对算法最终的处理结果(MACA+MRCR值)产生较大的影响。不同参数对算法的影响存在较大差别,如μhes、hestimoff、μfilter与MACA+MRCR值的响应关系呈现两边近似对称的抛物线形态。在最优值附近,MACA+MRCR值达到最大,说明此时算法的数据处理效果最佳。而随着μcaptdistsca值的增大,MACA+MRCR值的变化呈现为先几乎保持不变,随后下降,最后又保持不变的特点。
| 参数 | 最优参数 | 参数范围 | 测试步长 |
| μcaptdistsca | 0.5 | 0.1-20 | 0.25 |
| μcapdistmin | 0.71 | 0-2 | 0.1 |
| μhes | 1.96 | 0.05-5 | 0.25 |
| hestimoff | 4 | 0.1-10 | 0.5 |
| μfilter(×STD) | 2.5 | 0.5-5 | 0.5 |

|
| 图 6 CUBE、曲面滤波参数敏感性分析结果 Fig. 6 CUBE and surface filter parameter sensitivity analysis results |
3.4 优选参数应用
如图 7所示,应用优选后的CUBE参数,生成整个研究区的CUBE曲面。虽然原始数据集内含有大量异常值,但算法对绝大部分区域的海底地形构建非常准确。同时也可看到个别区域存在明显的测深异常,经分析是由于连续脉冲状异常值导致数据的“信噪比”较低,需进行人工干预编辑(图 7(a))。

|
| 图 7 最优CUBE水深曲面及辅助信息 Fig. 7 Optimal CUBE surface and auxiliary information |
从图 7(b)可看出大部分地形平坦区只有一个水深假设,而在多尺度沙波发育区,尤其是在沙波波峰处存在多个水深假设,且假设的强度较低(图 7(c))。这是由于算法在不确定度传播过程中,假设测深点附近一定范围内的水深值不变,使用零阶预测进行水深值及不确定度传播[34],而沙波发育区水深变化大,这些差异较大的测深点传播到同一格网点内导致多个水深假设的建立。
测区中部存在垂直于航迹线的水深异常区,且按一定间隔出现,经分析为ADCP对多波束测深仪的干扰导致(图 7(b))。由于这些异常点较少,通过消歧算法可有效抑制(图 7(a))。沿航迹线左右舷对称分布,且越远离中央波束越严重的波状假地形为恶劣海况导致安装杆抖动引起的(图 7(b)),此异常目前还没有较好的解决办法[15]。
以传统人工编辑生成的水深曲面为基准,对最终水深曲面进行精度评估。如图 8(a)、(c)所示,除由于安装杆抖动导致个别区域的差值较大(10~20 cm)外,大部分区域的水深差值小于3 cm;统计显示全区97.2%和97.8%的区域,两者差值在平均水深的1‰和2‰以内(图 8(b))。表明处理得到的水深曲面与基准水深曲面几乎一致,完全满足处理精度要求。

|
| 图 8 CUBE曲面与手工编辑曲面差异 Fig. 8 Differences between CUBE surface and manually edited surface |
如图 9所示,对比统计了最优CUBE曲面法与传统人工编辑法处理该数据集所需时间。饼状图面积与总时间成正比,最优CUBE曲面法总用时109 min,且绝大部分时间用于参数联合优选(61.5%)和CUBE曲面编辑(27.5%);人工编辑法总用时876 min,绝大部分时间用于条带编辑(63.6%)和子区编辑(33.0%)。表明最优CUBE曲面法的处理效率远高于传统人工编辑法。

|
| 图 9 最优CUBE曲面法与人工编辑法时效对比 Fig. 9 Comparison between optimal CUBE surface method and manual editing method |
综上所述,将优选后的CUBE、曲面滤波参数应用到数据处理中,不但可保证最终的数据处理效果,且与传统人工处理法相比提升多波束数据处理效率达到8倍以上。
4 结论(1) 系统阐述了CUBE算法的基本原理、数学模型、关键参数和主要处理步骤,通过测深点不确定度运算、不确定度传播、格网点吸收、水深假设建立与更新等步骤完成格网点水深及其精度的联合运算。
(2) 建立了CUBE、曲面滤波参数联合优选方法。通过选取典型地形区、参数试验、对比分析等关键步骤完成参数的联合优选,并用台湾浅滩实测数据对优选方法进行了验证,对处理过程、关键问题和时效对比进行了详细分析。试验表明,优选的参数可大幅提升多波束数据自动处理的精度和效率,具有实际的工程应用价值。
| [1] |
李家彪.
多波束勘测原理技术与方法[M]. 北京: 海洋出版社, 1999.
LI Jiabiao. Multibeam sounding principles, survey technologies and data processing methods[M]. Beijing: Ocean Press, 1999. |
| [2] |
赵建虎.
现代海洋测绘[M]. 武汉: 武汉大学出版社, 2008.
ZHAO Jianhu. Modern marine surveying and charting[M]. Wuhan: Wuhan University Press, 2008. |
| [3] |
黄辰虎, 陆秀平, 黄谟涛, 等.浅水多波束测深潮汐改正技术[C]//第十九届海洋测绘综合性学术研讨会论文集.九江: 中国测绘学会, 2007. HUANG Chenhu, LU Xiuping, HUANG Motao, et al. Shallow water multibeam sounding tide correction technology[C]//Marine Surveying and Mapping Comprehensive Symposium. Jiujiang: Chinese Society of Geodesy, Photogrammetry and Cartography, 2007. |
| [4] |
阳凡林, 李家彪, 吴自银, 等.
多波束测深瞬时姿态误差的改正方法[J]. 测绘学报, 2009, 38(5): 450–456.
YANG Fanlin, LI Jiabiao, WU Ziyin, et al. The methods of removing instantaneous attitude errors for multibeam bathymetry data[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(5): 450–456. DOI:10.3321/j.issn:1001-1595.2009.05.012 |
| [5] |
赵荻能, 吴自银, 周洁琼, 等.
声速剖面精简运算的改进D-P算法及其评估[J]. 测绘学报, 2014, 43(7): 681–689.
ZHAO Dineng, WU Ziyin, ZHOU Jieqiong, et al. A method for streamlining and assessing sound velocity profiles based on improved D-P algorithm[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(7): 681–689. |
| [6] |
吴自银, 李家彪, 阳凡林, 等.
一种大陆坡脚点自动识别与综合判断方法[J]. 测绘学报, 2014, 43(2): 170–177.
WU Ziyin, LI Jiabiao, YANG Fanlin, et al. An intergrated method for automatic identification of the foot point of slope[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(2): 170–177. |
| [7] |
赵建虎, 欧阳永忠, 王爱学.
海底地形测量技术现状及发展趋势[J]. 测绘学报, 2017, 46(10): 1786–1794.
ZHAO Jianhu, OUYANG Yongzhong, WANG Aixue. Status and development tendency for seafloor terrain measurement technology[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1786–1794. DOI:10.11947/j.AGCS.2017.20170276 |
| [8] | WU Ziyin, JIN Xianglong, LI Jiabiao, et al. Linear sand ridges on the outer shelf of the east China Sea[J]. Chinese Science Bulletin, 2005, 50(21): 2517–2528. DOI:10.1007/BF03183643 |
| [9] | WU Ziyin, JIN Xianglong, CAO Zhenyi, et al. Distribution, formation and evolution of sand ridges on the East China Sea shelf[J]. Science in China Series D:Earth Sciences, 2010, 53(1): 101–112. |
| [10] | WU Ziyin, LI Jiabiao, JIN Xianglong, et al. Distribution, features, and influence factors of the submarine topographic boundaries of the Okinawa Trough[J]. Science China Earth Sciences, 2014, 57(8): 1885–1896. DOI:10.1007/s11430-013-4810-3 |
| [11] | WU Ziyin, JIN Xianglong, ZHOU Jieqiong, et al. Comparison of buried sand ridges and regressive sand ridges on the outer shelf of the East China Sea[J]. Marine Geophysical Research, 2017, 38(1-2): 187–198. DOI:10.1007/s11001-016-9278-z |
| [12] | ZHOU Jieqiong, WU Ziyin, JIN Xianglong, et al. Observations and analysis of giant sand wave fields on the Taiwan Banks, Northern South China Sea[J]. Marine Geology, 2018, 406(1): 132–141. |
| [13] | ZHAO Jianhu, MENG Junxia, ZHANG Hongmei, et al. A new method for acquisition of high-resolution seabed topography by matching seabed classification images[J]. Remote Sensing, 2017, 9(12): 1214. DOI:10.3390/rs9121214 |
| [14] | ZHAO Jianhu, YAN Jun, ZHANG Hongmei, et al. A new method for weakening the combined effect of residual errors on multibeam bathymetric data[J]. Marine Geophysical Research, 2014, 35(4): 379–394. DOI:10.1007/s11001-014-9228-6 |
| [15] |
吴自银, 阳凡林, 罗孝文, 等.
高分辨率海底地形地貌——探测处理理论与技术[M]. 北京: 科学出版社, 2017.
WU Ziyin, YANG Fanlin, LUO Xiaowen, et al. High resolution submarine geomorphology[M]. Beijing: Science Press, 2017. |
| [16] |
赵建虎, 王爱学.
精密海洋测量与数据处理技术及其应用进展[J]. 海洋测绘, 2015, 35(6): 1–7.
ZHAO Jianhu, WANG Aixue. Precise marine surveying and data processing technology and their progress of application[J]. Hydrographic Surveying and Charting, 2015, 35(6): 1–7. DOI:10.3969/j.issn.1671-3044.2015.06.001 |
| [17] |
吴自银, 阳凡林, 李守军, 等.
高分辨率海底地形地貌——可视计算与科学应用[M]. 北京: 科学出版社, 2018.
WU Ziyin, YANG Fanlin, LI Shoujun, et al. High resolution submarine geomorphology[M]. Beijing: China Science Press, 2018. |
| [18] | FARR H K. Multibeam bathymetric sonar:sea beam and hydro chart[J]. Marine Geodesy, 1980, 4(2): 77–93. DOI:10.1080/15210608009379375 |
| [19] |
阳凡林, 李家彪, 吴自银, 等.
浅水多波束勘测数据精细处理方法[J]. 测绘学报, 2008, 37(4): 444–450, 457.
YANG Fanlin, LI Jiabiao, WU Ziyin, et al. The methods of high quality post-processing for shallow multibeam data[J]. Acta Geodaetica et Cartographica Sinica, 2008, 37(4): 444–450, 457. DOI:10.3321/j.issn:1001-1595.2008.04.008 |
| [20] | LUCIEER V, HUANG Zhi, SIWABESSY J. Analyzing uncertainty in multibeam bathymetric data and the impact on derived seafloor attributes[J]. Marine Geodesy, 2016, 39(1): 32–52. DOI:10.1080/01490419.2015.1121173 |
| [21] | REZVANI M H, SABBAGH A, ARDALAN A A. Robust automatic reduction of multibeam bathymetric data based on M-estimators[J]. Marine Geodesy, 2015, 38(4): 327–344. DOI:10.1080/01490419.2015.1053639 |
| [22] | BOURILLET J F, EDY C, RAMBERT F, et al. Swath mapping system processing:bathymetry and cartography[J]. Marine Geophysical Researches, 1996, 18(2-4): 487–506. DOI:10.1007/bf00286091 |
| [23] | CARESS D W, CHAYES D N. Improved processing of hydrosweep DS multibeam data on the R/V Maurice Ewing[J]. Marine Geophysical Researches, 1996, 18(6): 631–650. DOI:10.1007/bf00313878 |
| [24] | PEREDA GARCÍA R, PINA GARCÍA F, DE LUIS RUIZ J M, et al. Model for the processing and estimation of dual frequency echo sounder observations in detailed bathymetries[J]. Marine Geodesy, 2016, 39(3-4): 305–320. DOI:10.1080/01490419.2016.1193577 |
| [25] | EEG J. On the identification of spikes in soundings[J]. International Hydrographic Review, 1995, 72(1): 33–41. |
| [26] | DEBESE N. Use of a robust estimator for automatic detection of isolated errors appearing in the bathymetry data[J]. International Hydrographic Review, 2001, 2(2): 32–44. |
| [27] | DEBESE N. Multibeam echosounder data cleaning through an adaptive surface-based approach[C]//Proceedings of the US Hydrographic Conference. Norfolk: [s.n.], 2007: 1-18. |
| [28] | LECOURS V, DOLAN M F J, MICALLEF A, et al. A review of marine geomorphometry, the quantitative study of the seafloor[J]. Hydrology and Earth System Sciences, 2016, 20(8): 3207–3244. DOI:10.5194/hess-20-3207-2016 |
| [29] |
张志衡, 彭认灿, 黄文骞, 等.
考虑自然邻点影响域的多波束测深数据趋势面滤波改进算法[J]. 测绘学报, 2018, 47(1): 35–47.
ZHANG Zhiheng, PENG Rencan, HUANG Wenqian, et al. An improved algorithm of tendency surface filtering in multi-beam bathymetric data considering the natural neighboring points influence field[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(1): 35–47. DOI:10.11947/j.AGCS.2018.20160565 |
| [30] | DU Z, WELLS D, MAYER L. An approach to automatic detection of outliers in multibeam echo sounding data[J]. Hydrographic Journal, 1996, 79(1): 19–25. |
| [31] | LADNER R W, ELMORE P, PERKINS A L, et al. Automated cleaning and uncertainty attribution of archival bathymetry based on a priori knowledge[J]. Marine Geophysical Research, 2017, 38(3): 291–301. DOI:10.1007/s11001-017-9304-9 |
| [32] | CANEPA G, BERGEM O, PACE N G. A new algorithm for automatic processing of bathymetric data[J]. IEEE Journal of Oceanic Engineering, 2003, 28(1): 62–77. DOI:10.1109/joe.2002.808204 |
| [33] | SHAW S, ARNOLD J. Automated error detection in multibeam bathymetry data[C]//Proceedings of IEEE OCEANS'93. Victoria, BC, Canada: IEEE, 1993: 89-94. DOI: 10.1109/OCEANS.1993.326072. |
| [34] | CALDER B R, MAYER L A. Robust automatic multi-beam bathymetric processing[C]//US Hydrographic Conference. Norfolk(VA): [s.n.], 2001: 1-20. |
| [35] | CALDER B R, MAYER L A. Automatic processing of high-rate, high-density multibeam echosounder data[J]. Geochemistry, Geophysics, Geosystems, 2003, 4(6): 1048. DOI:10.1029/2002gc000486 |
| [36] | CALDER B R, SMITH S. A time comparison of computer-assisted and manual bathymetric processing[J]. International Hydrographic Review, 2004, 5(1): 10–23. |
| [37] | NOAA. Field Procedures Manual[EB/OL].[2017-05-02]. https://nauticalcharts.noaa.gov/publications/docs/standards-and-requirements/fpm/2014-fpm-final.pdf. |
| [38] | HOWLETT C. Considerations and advantages of accepting CUBE surfaces as survey deliverables[C]//Proceedings of the NSHC 29th Conference. Brest: [s.n.], 2010. |
| [39] | MALLACE D, GEE L. Multibeam processing-the end to manual editing?[J]. International Hydrographic Review, 2005, 6(1): 55–65. |
| [40] | MALLACE D, ROBERTSON P. Alternative use of CUBE: how to fit a square peg in a round hole[C]//US Hydrographic Conference 2007. Norfolk(VA): [s.n.], 2007: 1-12. |
| [41] | VÁSQUEZ M E, NICHOLS S, CLARKE J H. Tuning the CARIS implementation of CUBE for patagonian waters[D]. Fredericton: University of New Brunswick, 2007. |
| [42] | PARK Y, JUNG N D, DO JANG N, et al. Performance validation of surface filter based on CUBE algorithm for eliminating outlier in multi beam echo sounding[EB/OL].[2017-05-10]. https://www.hydrographicsociety.org/documents/hydrographicsociety.org/downloads/ifhs_news_no_1_-_yosup_park_et_al.pdf. |
| [43] |
王德刚, 叶银灿.
CUBE算法及其在多波束数据处理中的应用[J]. 海洋学研究, 2008, 26(2): 82–88.
WANG Degang, YE Yincan. The theory of CUBE algorithm and its application in the processing of multi-beam data[J]. Journal of Marine Sciences, 2008, 26(2): 82–88. DOI:10.3969/j.issn.1001-909X.2008.02.012 |
| [44] |
黄辰虎, 陆秀平, 侯世喜, 等.
利用CUBE算法剔除多波束测深粗差研究[J]. 海洋测绘, 2010, 30(3): 1–5.
HUANG Chenhu, LU Xiuping, HOU Shixi, et al. Study on detecting outlier of multibeam sounding based on CUBE algorithm[J]. Hydrographic Surveying and Charting, 2010, 30(3): 1–5. DOI:10.3969/j.issn.1671-3044.2010.03.001 |
| [45] |
贾帅东, 张立华, 曹鸿博.
基于CUBE算法的多波束水深异常值剔除[J]. 测绘科学, 2010, 35(S1): 57–59, 94.
JIA Shuaidong, Zhang Lihua, CAO Hongbo. A method for eliminating outliers of multibeam echosounder data based on CUBE[J]. Science of Surveying and Mapping, 2010, 35(S1): 57–59, 94. |
| [46] |
黄谟涛, 翟国君, 柴洪洲, 等.
检测多波束测深异常数据的CUBE算法模型解析[J]. 海洋测绘, 2011, 31(4): 1–4.
HUANG Motao, ZHAI Guojun, CHAI Hongzhou, et al. Analysis on the mathematical models of CUBE algorithm for the detection of abnormal data in multibeam echosounding[J]. Hydrographic Surveying and Charting, 2011, 31(4): 1–4. DOI:10.3969/j.issn.1671-3044.2011.04.001 |
| [47] |
王海栋, 柴洪洲.
基于CUBE算法的多波束测深数据自动处理研究[J]. 海洋通报, 2011, 30(3): 246–251.
WANG Haidong, CHAI Hongzhou. Research on multibeam bathymetry data automatic processing based on CUBE algorithm[J]. Marine Science Bulletin, 2011, 30(3): 246–251. DOI:10.3969/j.issn.1001-6392.2011.03.002 |
| [48] | HARE R, GODIN A, MAYER L A. Accuracy estimation of canadian swath (multibeam) and sweep (multitransducer) sounding systems[R]. Fredericton: Canadian Hydrographic Service, 1995. |
| [49] | SUSANA A. Error budget analysis for NAVO[EB/OL].[2017-05-20]. http://www.academia.edu/10086841/Error_Budget_Analysis_For_NAVO. |
| [50] | HARE R, EAKINS B, AMANTE C. Modelling bathymetric uncertainty[J]. International Hydrographic Review, 2011, 6(1): 31–42. |
| [51] | International Hydrographic Organization. IHO standards for hydrographic surveys[EB/OL].[2017-06-10]. http://www.iho.int/iho_pubs/standard/S-44_5E.pdf. |
| [52] | CALDER B. Automatic statistical processing of multibeam echosounder data[J]. International Hydrographic Review, 2003, 4(1): 53–68. |
| [53] | CALDER B R, WELLS D. CUBE user manual[M].[s.l.]: University of New Hampshire, 2004. |