

|
收稿日期: 2018-09-06; 预印本: 2018-12-13
基金项目: 国家重点研发计划(编号: 2016YFC1400900, 2016YFC0200700); 国家自然科学基金(编号: 41775023, 61475141); 浙江省自然科学基金(编号: LR19D050001)
第一作者简介: 刘志鹏,1994年生,男,硕士研究生,研究方向为海洋激光雷达的数据处理。E-mail:lzpopt@foxmail.com
通信作者简介: 吴兰,1967年生,女,教授,研究方向为光电检测与激光雷达遥感。E-mail:wul@zju.edu.cn
|
摘要
研制了一套船载海洋激光雷达,用于探测海水光学参数垂直廓线。2017年8月,该系统在黄海海域进行了实验测量。在准单次散射模型中引入原位测量的光学参数,实现了理想激光雷达回波信号的模拟,并将该理想信号与系统响应函数卷积后精确复现了实验的激光雷达信号。采用Fernald后向迭代积分法(简称Fernald法),比较了不同水体悬浮物激光雷达比下反演的激光雷达衰减系数α与原位漫射衰减系数Kd的差别。基于停航时标定的水体悬浮物激光雷达比,采用Fernald法获得了走航时的激光雷达衰减系数。进一步地,提出一种基于米散射激光雷达数据和原位测量的后向散射数据的融合算法,模拟了高光谱分辨率激光雷达(HSRL)反演α的过程,并将其与Fernald法进行了比较。实验结果表明,自研的海洋激光雷达能够有效探测海水光学参数,基于合适的水体悬浮物激光雷达比的Fernald法可以有效应用于米散射激光雷达的反演,未来无需假设的HSRL在海水光学参数探测领域具有更大的优势。
关键词
遥感, 海洋光学, 光学遥感, 激光雷达, 漫射衰减系数, 激光雷达衰减系数
Abstract
Studying seawater optical properties is of great importance in global climate change and material cycle. lidar has the ability to retrieve the profiles of seawater’s optical properties. A single-scattering lidar equation is typically a useful and effective model of lidar return. However, lidar return depends on the volume scattering function at 180° scattering angle and lidar attenuation coefficient, which makes retrieval from an equation difficult. The Fernald method is often used to retrieve backscatter lidar return with the assumption of lidar ratio. High Spectral Resolution Lidar (HSRL) can retrieve optical properties without assumption. A shipborne traditional lidar was developed to detect the vertical profile of seawater optical parameters. Experiments on seawater were conducted in the nearshore and offshore regions of the Yellow Sea. The lidar system was fixed on the front deck of a scientific survey boat. In situ optical measurements were also performed in the two regions. A simple quasi-single-scattering approximation was employed to calculate a modeled lidar return with inherent optical properties derived from the in situ measurement. The comparison of oceanographic lidar returns with modeled lidar returns using nearly coincident in situ optical properties were in perfect agreement with the nearshore and offshore regions, indicating that lidar can effectively detect seawater optical parameters. The difference between the inverse lidar attenuation coefficient and the in situ diffusion attenuation coefficient were analyzed based on the Fernald method with different lidar ratios. With the use of the calibrated lidar ratio, the lidar attenuation coefficients while sailing were obtained by using the Fernald method. A fusion algorithm based on traditional lidar data and in situ backscatter coefficient was also proposed to simulate HSRL. Then the accuracies of the Fernald method and fusion algorithm were compared. In the nearshore water column, diffuse attenuation coefficient varied from 0.15 m−1 to 0.28 m−1, and the maximum error of both methods was below 11%. As for the offshore water column, diffuse attenuation coefficients changed little through depths, approximately 0.1 m−1 to 0.16 m−1. The maximum error of the two methods was nearly 17%. The statistical analysis showed that diffuse attenuation coefficient can be well employed both by fusion algorithm and the Fernald method (with calibrated lidar ratio). This paper described the applications of lidar for profiling the properties of upper ocean. To overcome the assumption of lidar ratio in the future while retrieving water column information from traditional lidar, the HSRL without assumption has a great advantage in the field of seawater optical parameter detection.
Key words
remote sensing, ocean optics, optical remote sensing, lidar, diffuse attenuation coefficient, lidar attenuation coefficient
1 引 言
海洋覆盖了地球面积的71%,海水光学参数的测量对研究全球气候变化和物质循环具有重要的意义(Dickey 等,2006)。原位测量利用高光谱吸收或者衰减设备现场测量水体,探测精度高,是目前探测水体光学参数最成熟的方法之一,然而此种方式受限于低探测效率(Behrenfeld和Boss,2006)。卫星被动遥感技术能够提供全球尺度的水色信息,但是该方式无法提供足够的海洋垂直分布情况(Dickey 等,2006)。声学探测系统广泛应用于水体的垂直分布测量,但是其工作平台局限于水面或水下,无法应用于飞机平台和卫星载荷。海洋激光雷达作为一种主动式光学遥感设备,可用于探测水体的光学特性,能够对上层海洋垂直分布结构进行遥感测量,具备高时空分辨率、昼夜连续观测、全球尺度测量等优势(Vasilkov 等,2001)。
目前,海洋激光雷达已能够成功应用于生物探测、浮游植物层分布研究、浅海地形测绘、海洋内波探测等相关研究(Zhou 等,2019)。然而,利用激光雷达探测水体光学参数的研究相对较少。由于海洋激光雷达回波信号同时取决于海水对激光的衰减和后向散射,从回波信号反演出所需的光学参数存在困难。米散射激光雷达无光谱鉴频能力,反演水体光学参数时必须进行水体悬浮物激光雷达比的假设,探测精度有限。高光谱分辨率激光雷达(HSRL)增加带有窄带滤光片的通道,能将水体的后向散射和衰减参数分离开来,提高水体光学参数的反演精度(Zhou 等,2017)。
自主研制了一套船载米散射激光雷达,用于探测海水光学参数垂直廓线。该系统在黄海海域进行了实验测量。在准单次散射模型中纳入原位测量的光学参数,模拟了理想的激光雷达回波信号,并与系统响应卷积后精确复现了实验的激光雷达信号。分析了水体悬浮物激光雷达比对米散射激光雷达和Fernald迭代后向积分法(后文简称Fernald法)的影响,给出了当前水域最合适的水体悬浮物激光雷达比。基于标定的水体悬浮物激光雷达比,采用Fernald法获得了走航时的激光雷达衰减系数。提出了一种基于米散射激光雷达数据和原位测量的后向散射数据的算法(后文简称融合算法),模拟了高光谱分辨率激光雷达反演激光雷达衰减系数的过程,并比较分析了该算法与Fernald法的反演结果。实验表明海洋激光雷达能够有效探测水体光学参数,水体悬浮物激光雷达比对米散射激光雷达的应用至关重要,发展无需相关假设的HSRL是未来海洋激光雷达的发展方向。
2 基本原理
2.1 激光雷达系统
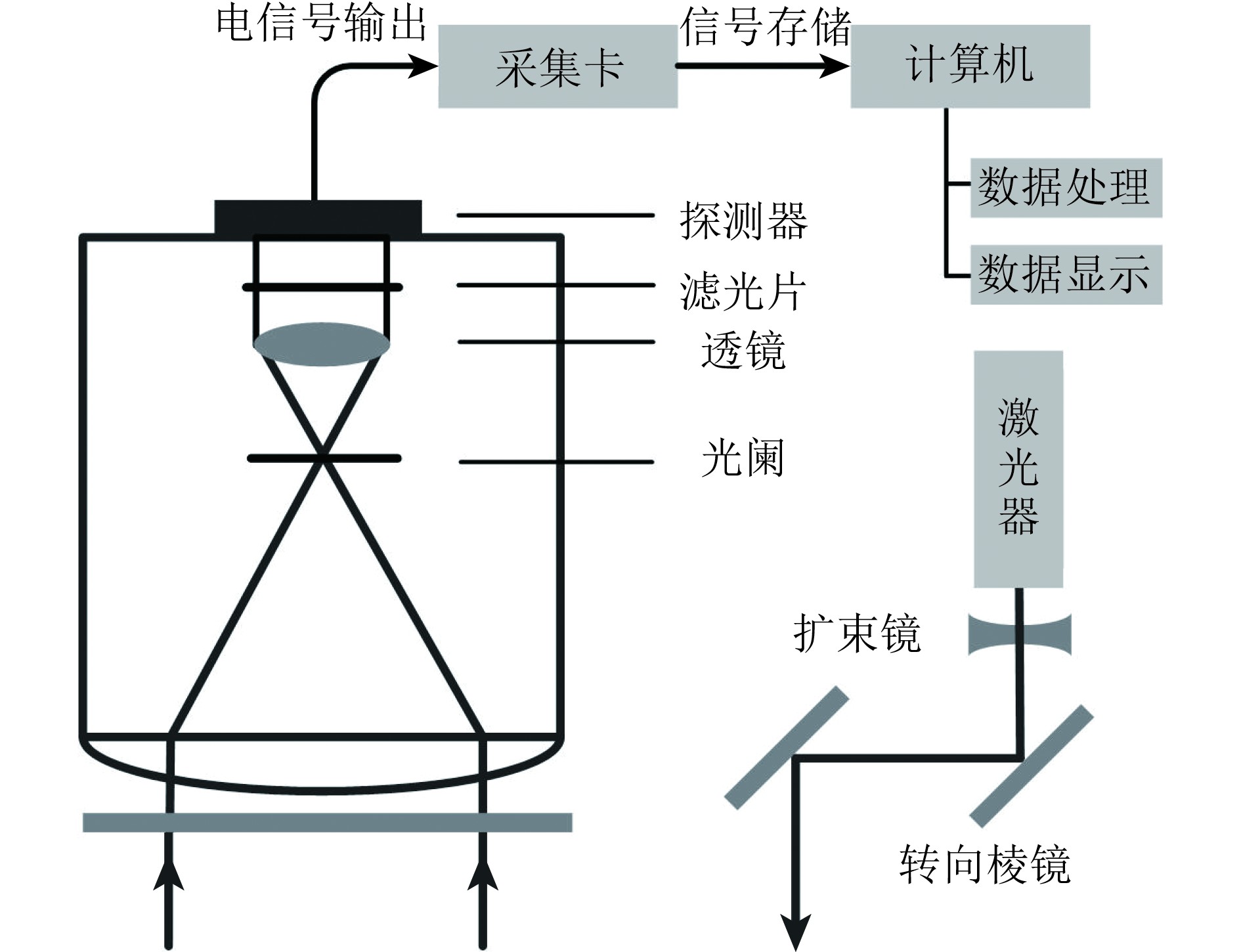
研制的船载海洋激光雷达系统主要由激光发射系统、接收系统以及信号采集和处理系统三大部分组成,系统结构示意图如图1所示。激光发射系统主要为一台倍频调Q的Nd:YAG脉冲激光器,激光波长为532 nm,出射能量约为5 mJ,脉宽约为10 ns,重频为10 Hz,经一系列的偏振分光棱镜、转向棱镜和凹透镜等光学器件组成的激光发射光路后射入海水。接收系统包括光学接收和光电转换两部分,由望远镜、线偏振片、光阑、干涉滤光片、准直透镜、光电探测器等组成,望远镜采用口径为100 mm的折射式望远镜,视场约为200 mrad,用于接收大气及海水产生的后向散射光。信号采集和处理系统由高速采集卡和计算机组成,采集卡用于接收探测器输出的电信号,采样频率为500 MHz,对应的深度分辨率约为0.22 m,计算机负责对采样数据进行实时存储、处理和显示。

2.2 方法
通常假设海洋激光雷达的回波信号满足准单次散射近似模型(Xu 等,2018),即回到接收器的激光经历了前进和返回过程中的多次前向传输和单次后向散射,其幅值可以写为(Zhou 等,2017)
| $ \begin{gathered} P\left({\textit{z}} \right) = \frac{{A\left( {\beta _{\rm{p}}^{\text{π}} \left({\textit{z}} \right) + \beta _{\rm{w}}^{\text{π}} \left({\textit{z}} \right)} \right)}}{{{{\left({nH + {\textit{z}}} \right)}^2}}} \\ {\rm{ }}\exp \left( { - 2\int_0^{\textit{z}} {\left( {{\alpha _{\rm{p}}}\left(x \right) + {\alpha _{\rm{w}}}\left(x \right)} \right){\rm{d}}x} } \right) \\ \end{gathered} $ | (1) |
式中,
式(1)表明,激光雷达方程同时依赖于水体的衰减和后向散射光学特性,从海洋激光雷达回波信号中反演出所需的光学参数存在一定困难。Fernald法通过假设水体悬浮物激光雷达比来反演激光雷达衰减系数(Fernald,1984),即
| $ \begin{split} \alpha \left(z \right) = & {\alpha _{\rm{p}}}\left({\textit{z}} \right) + {\alpha _{\rm{w}}}\left({\textit{z}} \right) = \left({1 - {R_{\rm{s}}}} \right){\alpha _{\rm{w}}}\left({\textit{z}} \right) + \\ & \frac{{D\left({\textit{z}} \right)\phi \left({\textit{z}} \right)}}{{\frac{{D\left({{{\textit{z}}_{\rm{c}}}} \right)}}{{{\alpha _{\rm{p}}}\left({{{\textit{z}}_{\rm{c}}}} \right) + {R_{\rm{s}}}{\alpha _{\rm{w}}}\left({{{\textit{z}}_c}} \right)}} + 2\int_{\textit{z}}^{{{\textit{z}}_{\rm{c}}}} {D\left({\textit{z}} \right)\phi \left({\textit{z}} \right){\rm{d}}{\textit{z}}} }} \end{split} $ | (2) |
式中,
Fernald法反演米散射激光雷达数据的精度严重依赖于假设的水体悬浮物激光雷达比,发展HSRL有望减少其产生的误差。已有研究(Zhou 等,2017)证明HSRL可以通过分离水分子和水体悬浮物的回波信号,无需假设相关参数,即可单独估算水体的180度后向散射和衰减信息。然而,目前中国还未研制出稳定可靠的海洋HSRL。提出一种结合米散射激光雷达和原位数据的融合算法,用于模拟HSRL反演
| $ \alpha \left({\textit{z}} \right) = {\alpha _{\rm{p}}}\left({\textit{z}} \right) + {\alpha _{\rm{w}}}\left({\textit{z}} \right) = - \frac{1}{2}\frac{{\rm{d}}}{{{\rm{d}}{\textit{z}}}}\left( {\ln \left( {{{D\left({\textit{z}} \right)} / {{\beta ^{\text{π}} }\left({\textit{z}} \right)}}} \right)} \right) $ | (3) |
3 实验测量与处理
3.1 实验测量
2017年8月在黄海水域开展了自研的海洋激光雷达探测水体光学参数的实验。实验海域主要包括近岸的平山岛水域(
海洋激光雷达系统安装于科考船前甲板处,距离水面约为11 m。每100组激光雷达回波信号平均为1组廓线,从而减少环境噪声的影响。选择原位作业时段的20条(200 s)激光雷达廓线与原位数据进行对比,以得到更加准确的实验对比效果。图2示出了近岸和远岸水域的测量结果,黑色虚线为实测的激光雷达廓线,红点为原位数据代入公式后得到的理想激光雷达廓线,红色实线为红点经过系统响应卷积后的建模激光雷达廓线。图2(a)为水体相对浑浊的近岸水域测量数据,激光雷达信号强度衰减快,在水深12 m处信噪比已经达不到有效测量的要求。在深度范围0—2 m处的激光雷达信号相对较低,可能是由近岸水域表层变动大且存在湍流等原因造成的。图2(b)的测量水域为水体相对清洁的远岸水域,激光雷达的有效探测深度明显增加到20 m水深处。
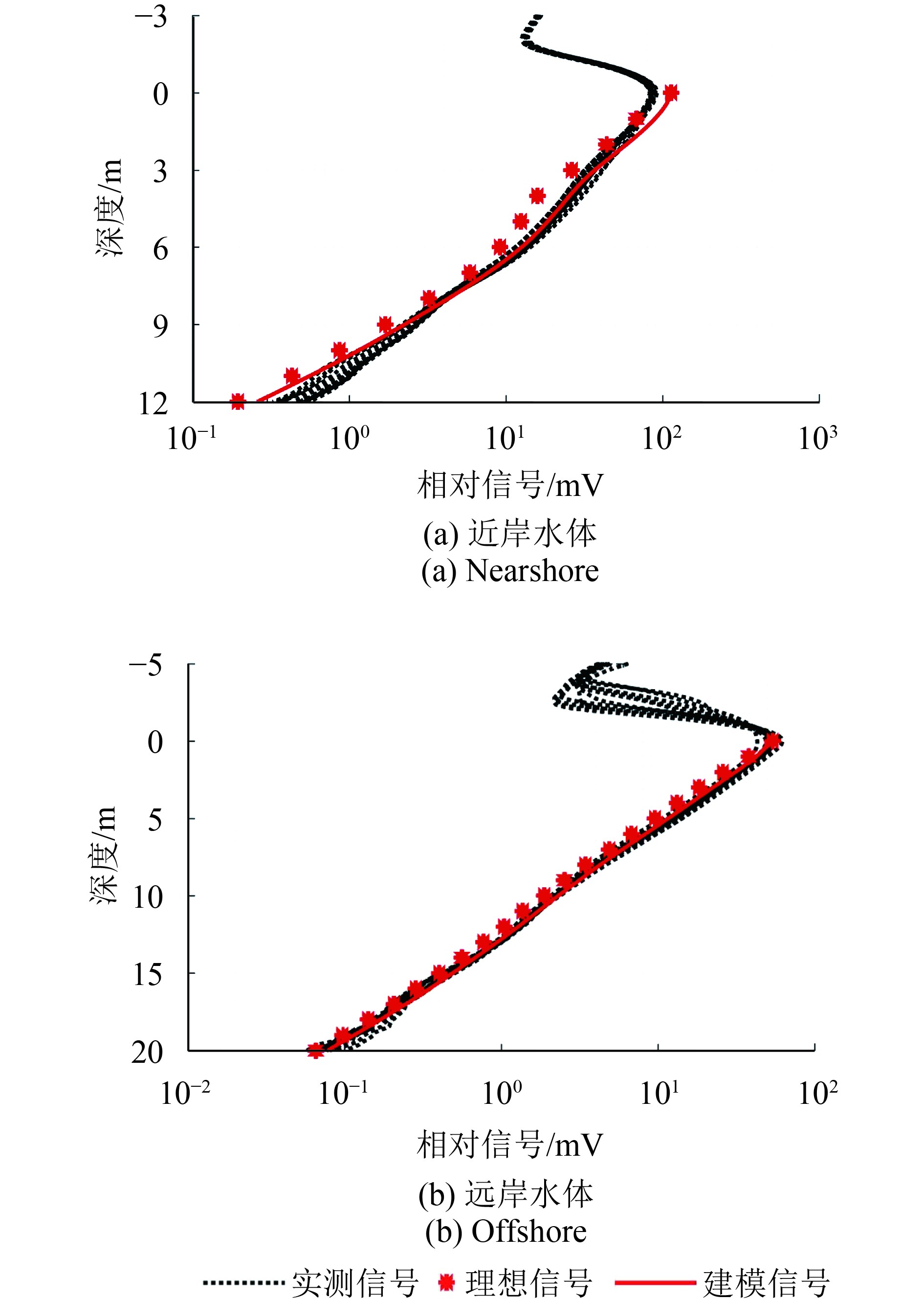
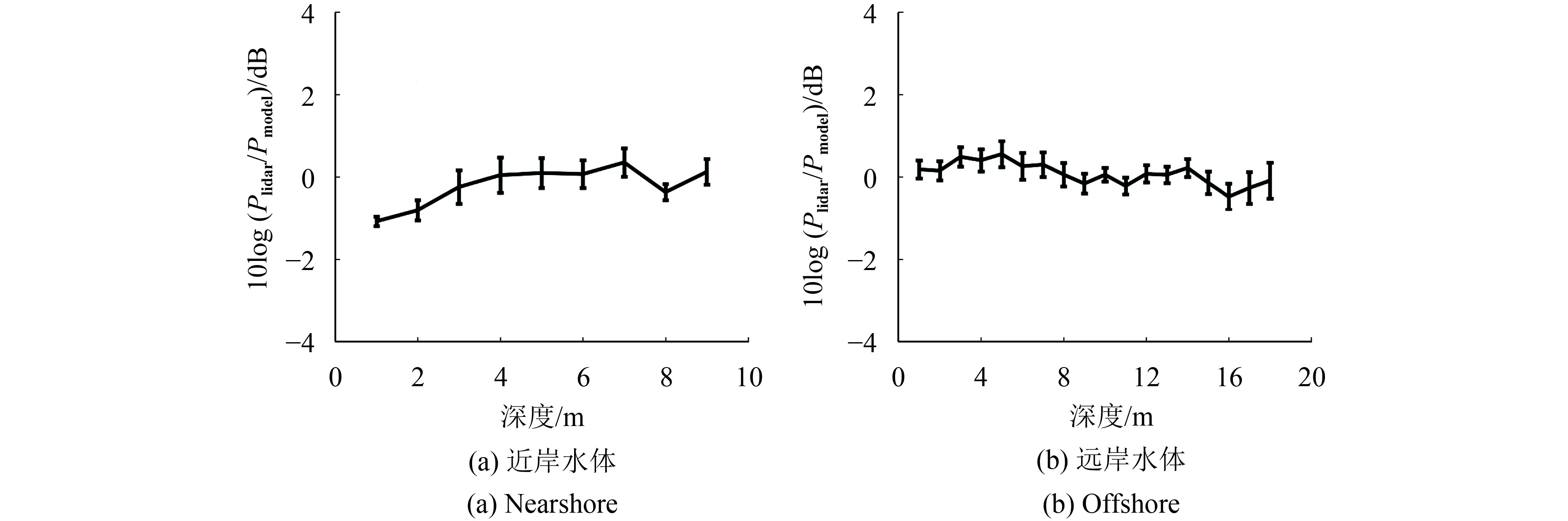
图3定量分析了在两块水域实测和建模的激光雷达廓线的吻合情况,用误差分析图来表示。图中的横坐标为深度,纵坐标为实测的20条激光雷达廓线和包含原位信息的建模激光雷达廓线幅值的平均比值,即
3.2 反演结果
图4给出了所假设的不同水体悬浮物激光雷达比
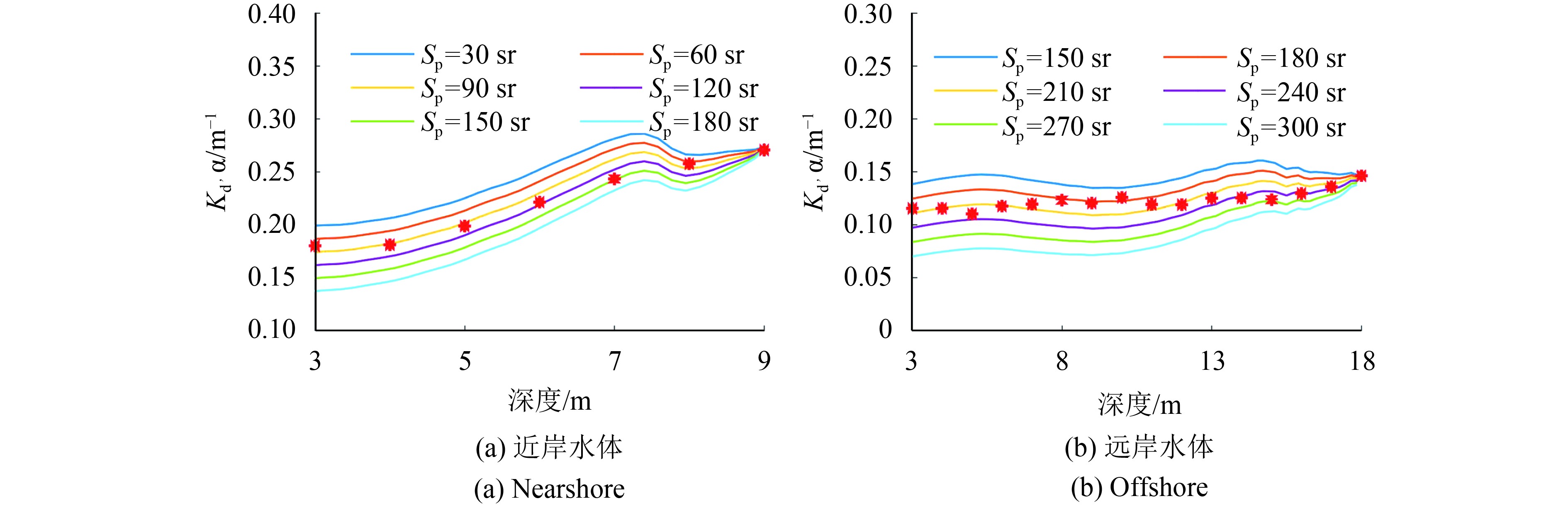
上述结果表明,米散射激光雷达需要辅助方法提供精确的水体悬浮物激光雷达比,否则无法保证激光雷达衰减系数
4 分析与讨论
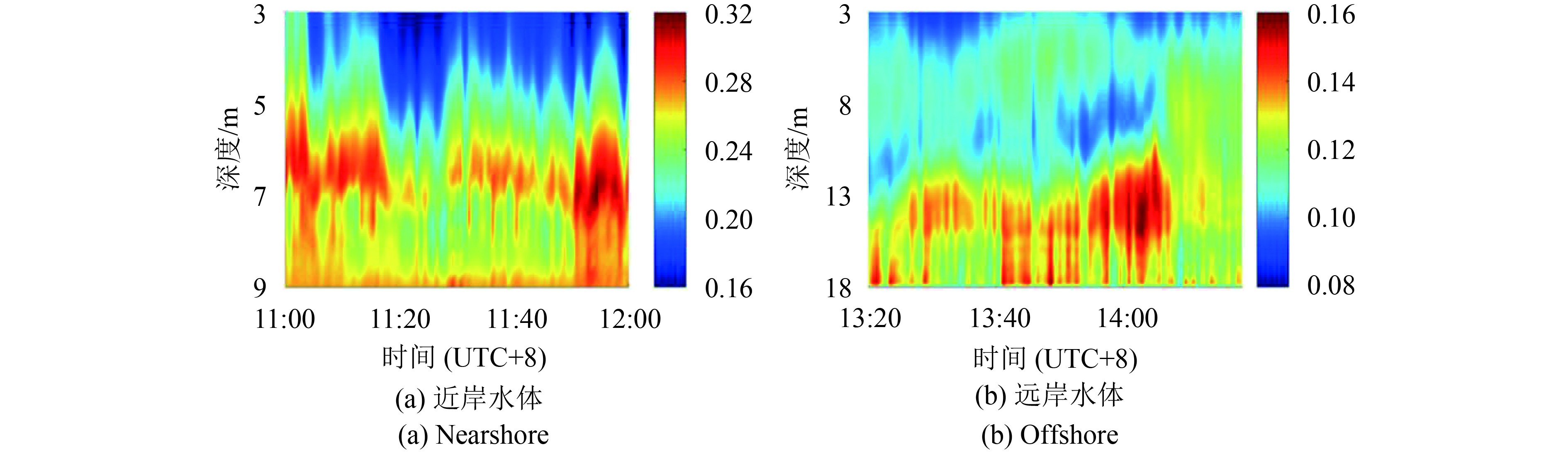
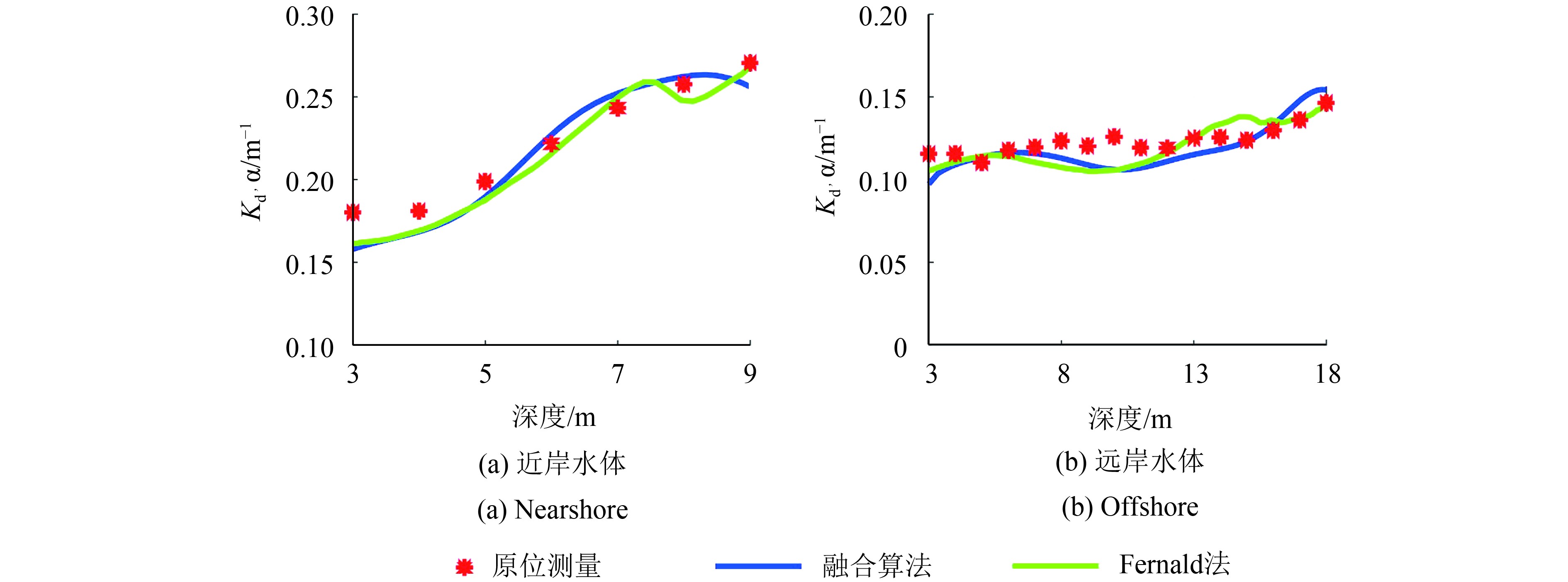
3.2节展示了Fernald法反演米散射激光雷达数据的结果,并采用标定的水体悬浮物激光雷达比反演了走航时段一定水域内的激光雷达数据。本节将引入融合算法反演激光雷达衰减系数,并将两种算法的精度进行一定的比较。图6示出了最佳水体悬浮物激光雷达比时的Fernald法和融合算法反演的激光雷达衰减系数
图7进行了整数深度值下的定量误差分析,得到以对数形式
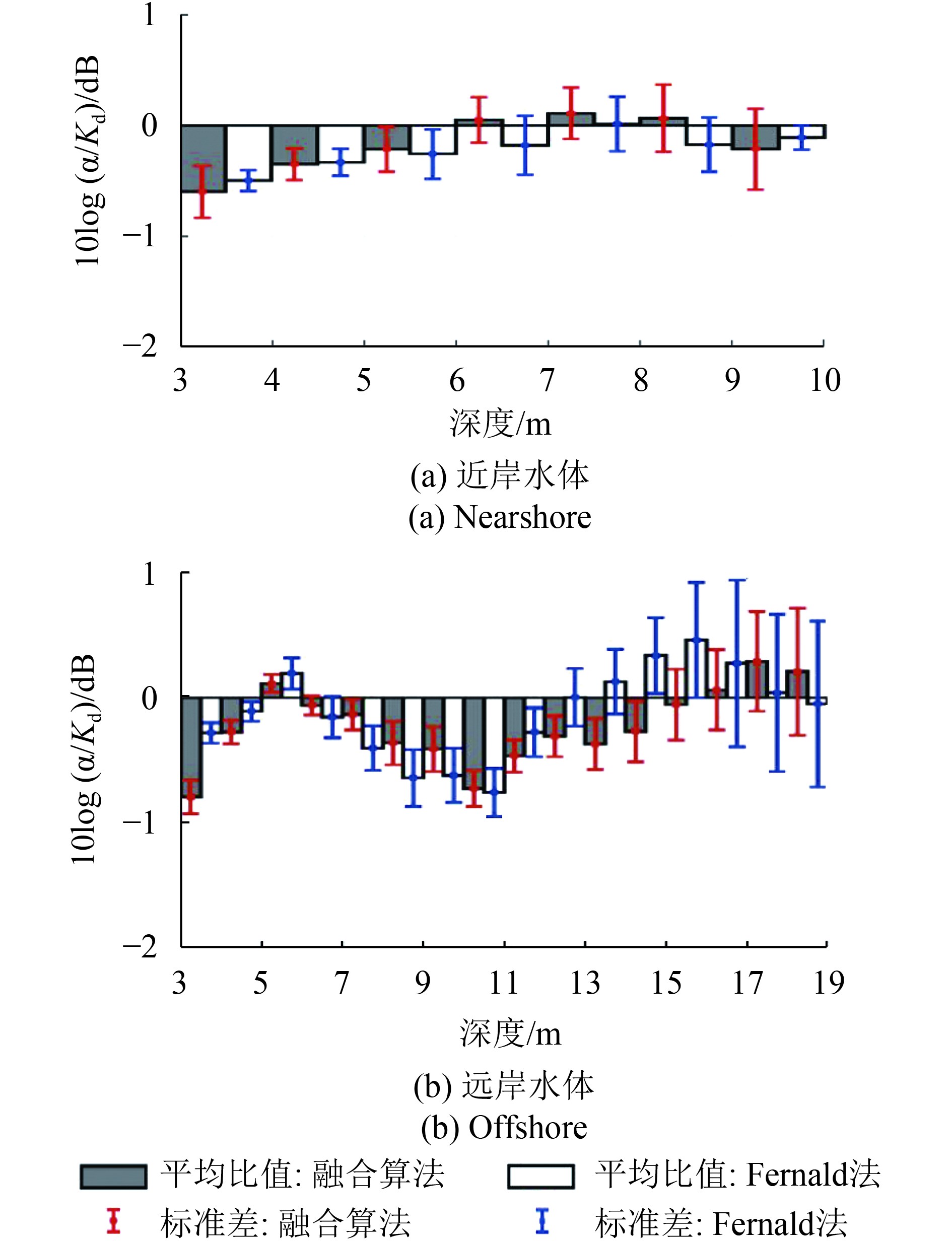
目前,Fernald法是一种米散射激光雷达数据反演的成熟算法,反演结果依赖于激光雷达比,标定激光雷达比的情况下Fernald法反演精度能有保证。同时,Fernald法为一个迭代的求解过程,需要选择迭代的初始值,即边界深度处的水体光学参数。所以,Fernald法需要获取激光雷达比和光学特性初始值,且其反演结果同这两个参数的准确程度息息相关。然而,激光雷达比和光学特性初始值的准确获取需要通过辅助仪器或方法实现。Fernald 法的不足限制了米散射激光雷达的应用,发展HSRL将有助于消除激光雷达比等参数的干扰。融合算法借助米散射激光雷达回波信号和原位仪器测量的180度后向散射系数,模拟了HSRL反演水体光学参数的过程,表明HSRL具有在数据反演时相对于米散射激光雷达无需相关假设等优势。目前,HSRL正在被国内多家单位研制中。在未来,其将采用具有高光谱分辨能力的光谱鉴频器,用于分离回波信号中的水分子瑞利散射成分和与水体悬浮物米散射成分,不需要假设激光雷达比等参数即可反演出衰减和后向散射等光学参数。
5 结 论
高垂直分辨率激光雷达系统对于探测上层水体的固有光学参数廓线具有重要意义。本文验证了自主研制的米散射激光雷达系统的探测精度,在近海和远海的有效深度范围内探测误差分别在5%和10%左右。进一步,开发了适用于米散射激光雷达的Fernald法,并采用融合算法对无需假设激光雷达比的高光谱分辨率激光雷达(HSRL)进行了评估。开发的Fernald算法通过米散射激光雷达数据,实现了上层水体衰减和后向散射光学产品的反演。提出的融合算法模拟了HSRL反演水体光学参数的过程,展示了HSRL在水体光学参数反演等方面的优势。
Fernald法是一种米散射激光雷达数据反演的成熟算法,但其仍然具有一定的假设,基于合适的水体悬浮物激光雷达比的Fernald法可以有效应用于米散射激光雷达的反演。在未来,无需假设的HSRL在海水光学参数探测领域具有更大的优势,是海洋激光雷达的发展方向,具有巨大的应用前景。
志 谢 此次野外实验得到了国家卫星海洋应用中心的资助,现场实测水体生物光学数据由国家海洋技术中心测量和处理分析,实验船舶得到了青岛海力海洋调查科技服务有限公司等单位的协助与支持,在此表示衷心的感谢!
参考文献(References)
-
Behrenfeld M J and Boss E. 2006. Beam attenuation and chlorophyll concentration as alternative optical indices of phytoplankton biomass. Journal of Marine Research, 64 (3): 431–451. [DOI: 10.1357/002224006778189563]
-
Churnside J H. 2015. Bio-optical model to describe remote sensing signals from a stratified ocean. Journal of Applied Remote Sensing, 9 (1): 095989 [DOI: 10.1117/1.JRS.9.095989]
-
Dickey T, Lewis M and Chang G. 2006. Optical oceanography: recent advances and future directions using global remote sensing and in situ observations. Reviews of Geophysics, 44 (1): RG1001 [DOI: 10.1029/2003RG000148]
-
Fernald F G. 1984. Analysis of atmospheric lidar observations: some comments. Applied Optics, 23 (5): 652–653. [DOI: 10.1364/AO.23.000652]
-
Gordon H R. 1982. Interpretation of airborne oceanic lidar: effects of multiple scattering. Applied Optics, 21 (16): 2996–3001. [DOI: 10.1364/AO.21.002996]
-
Lee J H, Churnside J H, Marchbanks R D, Donaghay P L and Sullivan J M. 2013. Oceanographic lidar profiles compared with estimates from in situ optical measurements . Applied Optics, 52 (4): 786–794. [DOI: 10.1364/AO.52.000786]
-
Vasilkov A P, Goldin Y A, Gureev B A, Hoge F E, Swift R N and Wright C W. 2001. Airborne polarized lidar detection of scattering layers in the ocean. Applied Optics, 40 (24): 4353–4364. [DOI: 10.1364/AO.40.004353]
-
Xu P T, Liu D, Zhou Y D, Liu Q, Bai J, Liu Z P, Wu L, Shen Y B and Liu C. 2019. Modeling and analyzing of oceanic lidar returns with multiple scattering. Journal of Remote Sensing : ( 徐沛拓, 刘东, 周雨迪, 刘群, 白剑, 刘志鹏, 吴兰, 沈亦兵, 刘崇. 2019. 海洋激光雷达多次散射回波信号建模与分析. 遥感学报待刊 : )
-
Zhou Y D, Liu D, Xu P T, Liu C, Bai J, Yang L M, Cheng Z T, Tang P J, Zhang Y P and Su L. 2017. Retrieving the seawater volume scattering function at the 180° scattering angle with a high-spectral-resolution lidar. Optics Express, 25 (10): 11813–11826. [DOI: 10.1364/OE.25.011813]
-
Zhou Y D, Liu D, Xu P T, Mao Z H, Chen P, Liu Z P, Liu Q, Tang P J, Zhang Y P, Wang X J, Ren J W and Jin S W. 2019. Detecting atmospheric-water optical property profiles with a polarized lidar. Journal of Remote Sensing, 23 (1): 108–115. [DOI: 10.11834/jrs.20197535] ( 周雨迪, 刘东, 徐沛拓, 毛志华, 陈鹏, 刘志鹏, 刘群, 唐培钧, 张与鹏, 王雪霁, 任佳炜, 金时伟. 2019. 偏振激光雷达探测大气-水体光学参数廓线. 遥感学报, 23 (1): 108–115. [DOI: 10.11834/jrs.20197535] )


