


|
收稿日期: 2017-10-10; 预印本: 2018-02-13
基金项目: 国家自然科学基金(编号:41461089,41541032,41664002);广西高校中青年教师基础能力提升项目(编号:2018KY0247);广西自然科学基金(编号:2015GXNSFAA139230);广西空间信息与测绘重点实验室项目(编号:16-380-25-22,16-380-25-11,15-140-07-34和16-380-25-31)
第一作者简介: 梁月吉,1988年生,男,讲师,研究方向为GNSS遥感技术及土壤湿度分析。E-mail:lyjayq@glut.edu.cn
通信作者简介: 任超,1974年生,男,教授,研究方向为GPS高精度数据处理及其应用。E-mail:renchao@glut.edu.cn
|
摘要
全球定位系统干涉反射测量(GPS-IR)是一种新的遥感技术,可用于估算近地表土壤水分含量。考虑到多卫星融合的优势和土壤湿度的时空尺度性,提出一种基于多星融合的土壤湿度最小二乘支持向量机(LS-SVM)滚动式估算模型。首先通过低阶多项式拟合分离GPS卫星直射和反射信号,进而建立反射信号正弦拟合模型,获取相对延迟相位。最后,通过线性回归模型有效分析和选取多卫星相对延迟相位,并建立基于多星融合的最小二乘支持向量机模型进行滚动式估算土壤湿度。以美国板块边界观测计划PBO提供的监测数据为例,对比分析利用单颗、多颗GPS卫星进行土壤湿度滚动式估算的可行性和有效性。经理论分析和两个测站实验表明:该模型充分发挥了LS-SVM的优势,有效综合了各卫星的性能,改善了采用单颗卫星进行土壤湿度估算时,其结果极易出现异常跳变的现象;模型只需较少的建模数据,采用滚动式能实现较长时间的估算,估算误差较为稳定;模型所估算的结果与土壤湿度实测值之间的相关系数R2以及均方根误差分别为0.942和0.962、0.072和0.032,相对于部分单一卫星至少提高了18.18%。因此,土壤湿度问题可作为非线性事件处理,采用多卫星融合估算是可行和有效的。
关键词
遥感, 全球定位系统干涉反射测量, 土壤水分, 多卫星融合, 最小二乘支持向量机, 估算精度
Abstract
Soil moisture content is an important parameter in hydrology, meteorology, and agriculture and is vital for meteorological forecast, flood disaster, and water resource cycle. Global positioning system interferometric reflectometry is a new remote sensing technique with low cost and high efficiency and resolution. This technique can be used to estimate near-surface soil moisture for the area surrounding the antenna from signal-to-noise ratio (SNR) data. In this study, a non-linear sliding estimation method of soil moisture based on multi-satellite fusion was proposed in consideration of the advantages of multi-satellite convergence and the time and space scale of soil moisture. First, the direct and reflection signals of GPS satellites were separated by means of low-order polynomial fitting. Then, the sinusoidal fitting model of reflection signals was established, and the relative delay phase of the SNR interferogram was obtained. Finally, a linear regression model was used to analyze and select the phase of SNR interferogram, and the sliding estimation method of the soil moisture using the least square support vector machine based on multi-system fusion was established. On the basis of the monitoring data provided by US Plate Boundary Observations Project, the feasibility and effectiveness of using single and multiple GPS satellites for sliding estimation of soil moisture were compared and analyzed. Results of the two types of data showed that the linear regression equation could efficiently describe the relationship between relative retardation phase and soil moisture and effectively select GPS satellites by setting the threshold range of correlation coefficient. The optimal parameters of least square support vector machine were selected by grid search method. Over-fitting did not occur in the process of multi-star fusion inversion, and the advantage of non-linear weight determination was fully exerted. When a single satellite was used for soil moisture inversion, the variation law of soil moisture was inaccurately obtained, and the error of inversion error fluctuated greatly, thereby resulting in the jump phenomenon. When the rolling multi-star fusion inversion model was used, the fluctuation of inversion error was relatively close, thereby effectively suppressing the transition phenomenon. The correlation coefficients between the estimated results and the measured values of soil moisture were 0.942 and 0.962, respectively. The root mean square errors were 0.072 and 0.032, which were at least 18.18% higher than those of some single satellites. The theoretical analysis and experiment showed that this method had fully utilized the advantages of least square support vector machine and effectively integrated the performance of each satellite. Overall, the method required less modeling data, the sliding mode could achieve long time estimation, and the estimation error was relatively stable. This method not only ensured the stability of the local error in the estimation process but also effectively restrained the abnormal jump phenomenon easily when single satellite was estimated. The inversion process was not easily affected by a single satellite. Therefore, the estimation of soil humidity can be treated as non-linear event, and multi-system fusion estimation is feasible and effective.
Key words
remote sensing, GPS-IR, soil moisture, multi-satellites fusion, least squares support vector machine, estimated accuracy
1 引 言
土壤湿度是水文、气象和农业环境研究中重要的参数,也是某一个位置或区域内水资源循环的重要指标,开展土壤湿度估算对于气候气象预报、洪水灾害以及水资源循环等相关研究具有重要意义(Sabater 等,2008;彭学峰 等,2017;金双根 等,2017)。传统的土壤湿度监测方法主要包括烘干称重法、中子仪法、时域反射仪法、频域反射仪法等,这些方法需要进行实地操作,处理过程往往较为烦杂,仅适用于小范围内的土壤湿度测量,存在时空分辨率低、成本过高、工作效率低等缺点(Le 等,2002;严颂华 等,2011)。近年来,利用GPS反射信号获取土壤表面湿度成为了一种新型的遥感监测手段,具有成本低、高效率、高分辨率等优点。Martin-Neira于1993年首次利用GPS反射信号实现了海洋高度的测量(Martin-Neira,1993),在此基础上,两种新的GPS遥感技术被提出:一种是GPS-R反射遥感技术;另一种是GPS-IR多径干涉遥感技术。其中,GPS-IR主要是利用直射和反射信号在接收机单天线处叠加所产生的干涉实现地表环境参数的估算,已经在土壤湿度监测中得到了认可(Rodriguez-Alvarez 等,2009)。而且,GPS天线和接收器都比较适用于地面遥感,因为卫星信号主要采用L波段(L1和L2载波)进行传输,该波段的电磁波在大气中衰减少,并能有效穿透植被(Rodriguez-Alvarez 等,2009)。Tsang等(1985)对于地表特性的微波遥感技术研究已超过了30年,证实了该技术获取地表环境参数的有效性。对于微波频率,Hallikainen等(1985)表明地面的介电常数很大程度上取决于其含水量。目前,GPS反射信号已被应用于估算雪深、海平面高度、土壤水分含量和植被指数等测站环境参数及其变化(严颂华 等,2011;Ferrazzoli 等,2011;Cardellach 等,2012;金双根 等,2017)。针对土壤介电常数与土壤湿度之间的关系研究,Dobson等(1985)构建了基于简化的经验或半经验土壤湿度反演模型,并给出了不同环境条件下的土壤湿度估算效果。然而,这些模型涉及到众多的参数,且建模过程较为复杂,存在受人为经验影响、泛化能力不强、适用范围受限等缺陷。敖敏思等(2015)研究表明在一定卫星高度截止角内,采用SNR观测值可实现土壤湿度变化趋势的反演,利用指数函数能够有效描述相对延迟相位与土壤湿度之间的关系。Bilich和Larson(2007)研究开发了利用SNR数据来映射多路径环境的方法,通过利用小波变换实现了反射信号相关信息的分离,并证实了反射信号的幅度和频率与多路径环境有着密切的关系,并以此修正相位观测值,取得较好结果。Zavorotny等(2010)证明了利用相对延迟相位反演土壤湿度比振幅更有优势。基于其他遥感手段对植被散射问题的相关研究成果,众多学者也展开了对采用GPS反射信号进行土壤湿度估算中的植被效应修正、植被含水量估计、植被参数估计等研究工作(Wu 等,2012)。Chew等(2015)针对近地表土壤含水量对GPS多路径的影响,开发了土壤水分检索算法,并研究了近地表植被变化对信噪比SNR(Signal Noise Ratio)的影响。由于测站周边的土壤表面粗糙度、植被覆盖信息、土壤水分含量等多路径因素对GPS信号的影响均不一样,直接建立准确的土壤湿度估算模型较为困难。而且,不同时刻的GPS卫星信号受多路径效应的影响程度也不一样。已有的研究较少考虑到多卫星融合估算土壤湿度的优势,估算过程也难免人为干预影响,不利于估算精度的提高。如果土壤湿度是随着时间和空间尺度变化的事件,那么采用GPS-IR技术进行土壤湿度估算可看成是一个非线性回归问题。
基于上述研究,本文提出了一种基于多卫星融合的土壤湿度最小二乘支持向量机滚动式估算模型。最小二乘支持向量机LS-SVM (Least Squares Support Vector Machine)是Suykens和Vandewalb于1999年提出的机器学习方法,能够较好地解决小样本、非线性和高维模式识别等实际问题(Suykens和Vandewalle,1999),已在建筑物变形预警、滑坡预测等非线性事件处理中得到广泛应用(Xie 等,2017)。与人工神经网络、最小二乘拟合算法等传统非线性方法相比,LS-SVM模型需要更少的建模数据即可实现样本的测试,具有更强的泛化能力。因此,本文将最小二乘支持向量机引入到土壤湿度估算中,建立基于多卫星融合的土壤湿度最小二乘支持向量机估算模型。同时,考虑到LS-SVM模型的参数优化问题,采用网格搜索法选取LS-SVM的最优参数(Yang 等,2015;Xie 等,2017)。经美国板块边界观测计划PBO提供的监测数据,对比分析利用单颗、多颗GPS卫星进行土壤湿度估算的可行性,研究和验证滚动式估算的有效性。
2 基于多星融合的土壤湿度LS-SVM滚动式估算模型
2.1 卫星信号反射原理
GPS信噪比是反映接收机天线信号质量的指标,主要受接收机天线增益参数、接收机中相关器的状态和多路径效应等因素的共同影响(敖敏思 等,2015)。多路径效应是指GPS接收机同时接受到来自测站附近不同反射体反射的卫星信号和卫星直射信号,这两种信号经过相互叠加产生干涉,造成接收机观测值与真值之间存在一定的偏差,随之产生多路径误差。GPS卫星高度角与接收机天线增益之间存在正比关系,较高的卫星高度角有利于天线增益的增大,进而提高信噪比SNR;反之,天线增益减小,信噪比SNR受多路径环境影响更为明显(张双成 等,2016)。因此,信噪比SNR与多路径环境存在直接的关系,通过利用信噪比SNR值建立多路径效应评估模型,有利于估算地表环境参数。SNR可描述为(敖敏思 等,2015;Chew 等,2015)
| $\mathop {SNR}\limits^ \cdot = {\dot S_d}(0) + {\dot S_m}(\phi )$ | (1) |
式中,
反射信号的幅度值可采用直角形式表示(敖敏思 等,2015;Chew 等,2015)
| $SN{R^2} = S_d^2 + S_m^2 + 2{S_d}{S_m}\cos \psi $ | (2) |
式中,
因此,GPS天线接收的信号往往是直接、反射信号叠加混合的信号(图1)。图1(b)代表P041测站2011年第318天,PRN31卫星的SNR干涉图。可见,在低卫星高度角下,GPS信噪比受多路径影响较为突出(图1(b)中的红色框区域)。不同的卫星信号受多路径影响的程度均不一样,土壤湿度信息主要包含在多路径环境影响的成分中(Chew 等,2016)。如何在多路径环境影响的成分中获取与土壤湿度相关的信息是需要探讨的问题。
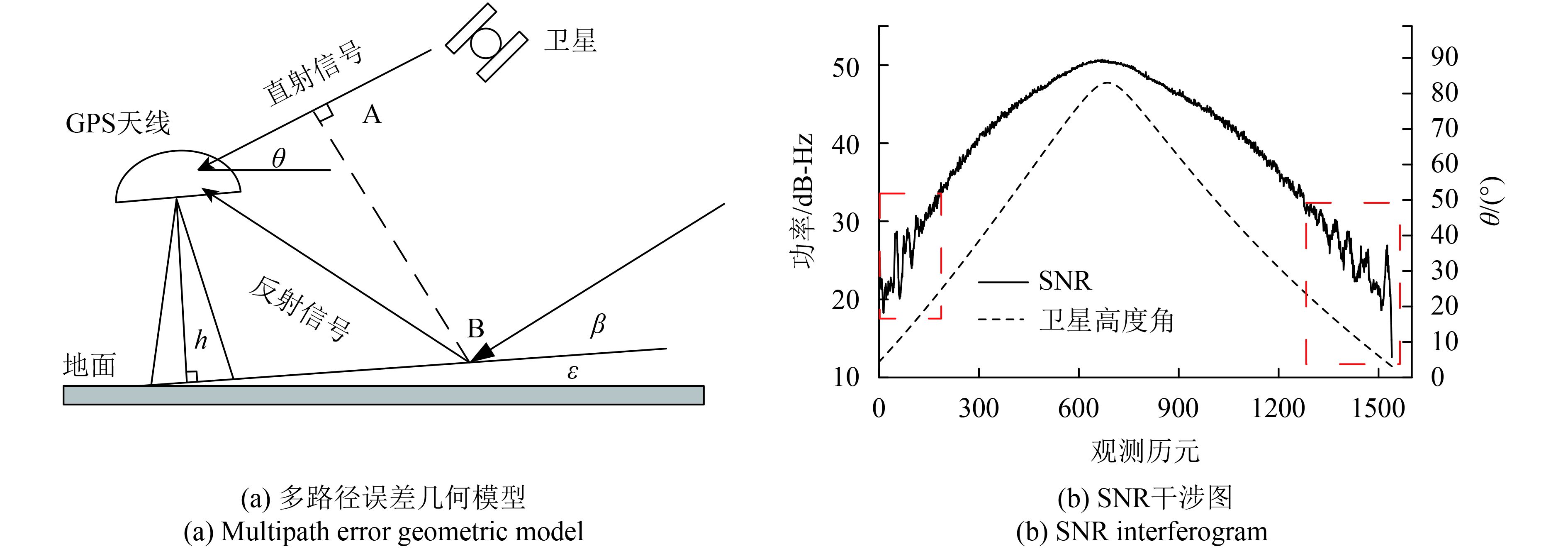

图1(a)中,
| $\theta {\rm{ = }}\beta + \varepsilon \approx \beta $ | (3) |
结合图1,可推导出卫星直射信号与反射信号之间的相位差为(叶险峰,2016)
| $\psi {\rm{ = }}\frac{{4{\text{π}} h}}{\lambda }\sin \theta $ | (4) |
由式(4)可见,相位差
| ${\omega _t}{\rm{ = }}\frac{{{\rm{d}}\psi }}{{{\rm{d}}t}}{\rm{ = }}\frac{{2{\text{π}} }}{{\textit{λ}} }2h\frac{{{\rm{d}}(\sin \theta)}}{{{\rm{d}}t}}$ | (5) |
从式(5)可见,
Chew等(2015)研究表明:SNR观测值与
| $SN{R_{MP2}}{\rm{ = }}{A_{MP2}}\cos \left(\frac{{4{\text{π}} H}}{{\textit{λ}}}\sin \theta + {\phi _{MP2}}\right)$ | (6) |
式中,
如果令
| $SN{R_{MP2}}{\rm{ = }}{A_{MP2}}\cos (2{\text{π}} f{u_0} + {\phi _{MP2}})$ | (7) |
可见,
2.2 基于多星融合的土壤湿度LS-SVM估算原理
设GPS卫星相对延迟相位集
| ${x} = \left[ {x_1^0, x_2^0, \cdots, x_N^0} \right], \left({N{\rm{ = }}1, 2, \cdots, l} \right)$ |
| $x_N^0{\rm{ = }}\left[ {\phi _{MP2}^1, \phi _{MP2}^2, \cdots, \phi _{MP2}^M} \right], \left({M{\rm{ = 1, 2}}, \cdots, {\rm{32}}} \right)$ | (8) |
式中,
设给定的训练集样本为
| $\left\{ {\begin{array}{*{20}{c}} {\min Q({w}, {e}){\rm{ = }}\dfrac{1}{2}{{\left\| {w} \right\|}^2} + \dfrac{\gamma }{2}\sum\limits_{i = 1}^l {{e}_i^2} }\\ {{\rm{s.t.}}{{y}_i}{\rm{ = }}{{w}^{\rm{T}}}\varphi \left({{{x}_i}} \right) + b + {{e}_i}(i = 1, 2, \cdots, l)} \end{array}} \right.$ | (9) |
式中,
定义式(9)的拉格朗日函数为
| $ \begin{split} & {L}\left({{w}, b, {e}, {a}} \right) = \frac{1}{2}{\left\| {w} \right\|^2} + \frac{\gamma }{2}\sum\limits_{i = 1}^l {{e}_i^2} - \\ & \sum\limits_{i = 1}^l {{{a}_i}} \left[ {{{w}^{\rm{T}}}\varphi \left({{{x}_i}} \right) + b + {{e}_i} - {{y}_i}} \right] \end{split} $ | (10) |
式中,
| $\left\{ {\begin{array}{*{20}{l}} {\dfrac{{\partial {L}}}{{\partial {w}}}{\rm{ = }}0 \to {w}{\rm{ = }}\displaystyle\sum\limits_{i = 1}^l {{{a}_i}} \varphi \left({{{x}_i}} \right)}\\ {\dfrac{{\partial {L}}}{{\partial b}}{\rm{ = }}0 \to \displaystyle\sum\limits_{i = 1}^l {{{a}_i}} {\rm{ = }}0}\\ {\dfrac{{\partial {L}}}{{\partial {{e}_i}}}{\rm{ = }}0 \to {{a}_i}{\rm{ = }}\gamma {{e}_i}}\\ {\dfrac{{\partial {L}}}{{\partial {{a}_i}}}{\rm{ = }}0 \to {{w}^{\rm{T}}}\varphi \left({{{x}_i}} \right) + b + {{e}_i} - {{y}_i}{\rm{ = }}0} \end{array}} \right.$ | (11) |
消去式(11)的变量
| $\left[ {\begin{array}{*{20}{c}} 0&{{{A}^{\rm{T}}}}\\ {A}&{K\left({{{x}_i}, {{x}_j}} \right) + {\gamma ^{ - 1}}{{F}_0}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} b\\ {a} \end{array}} \right]{\rm{ = }}\left[ {\begin{array}{*{20}{c}} 0\\ {y} \end{array}} \right]$ | (12) |
式中,
由于
| $\left\{ {\begin{array}{*{20}{c}} {b{\rm{ = }}\dfrac{{{{A}^{\rm{T}}}{{B}^{ - 1}}{y}}}{{{{A}^{\rm{T}}}{{B}^{ - 1}}{A}}}}\\ {{a}{\rm{ = }}{{B}^{ - 1}}\left({{y} - b{A}} \right)} \end{array}} \right.$ | (13) |
那么,在点
| $\tilde f\left({{{{x}}^*}} \right){\rm{ = }}\sum\limits_{i = 1}^l {{{a}_i}} K\left({{{x}_i}, {{x}^*}} \right) + b$ | (14) |
由于LS-SVM性能的优劣很大程度上取决于核函数
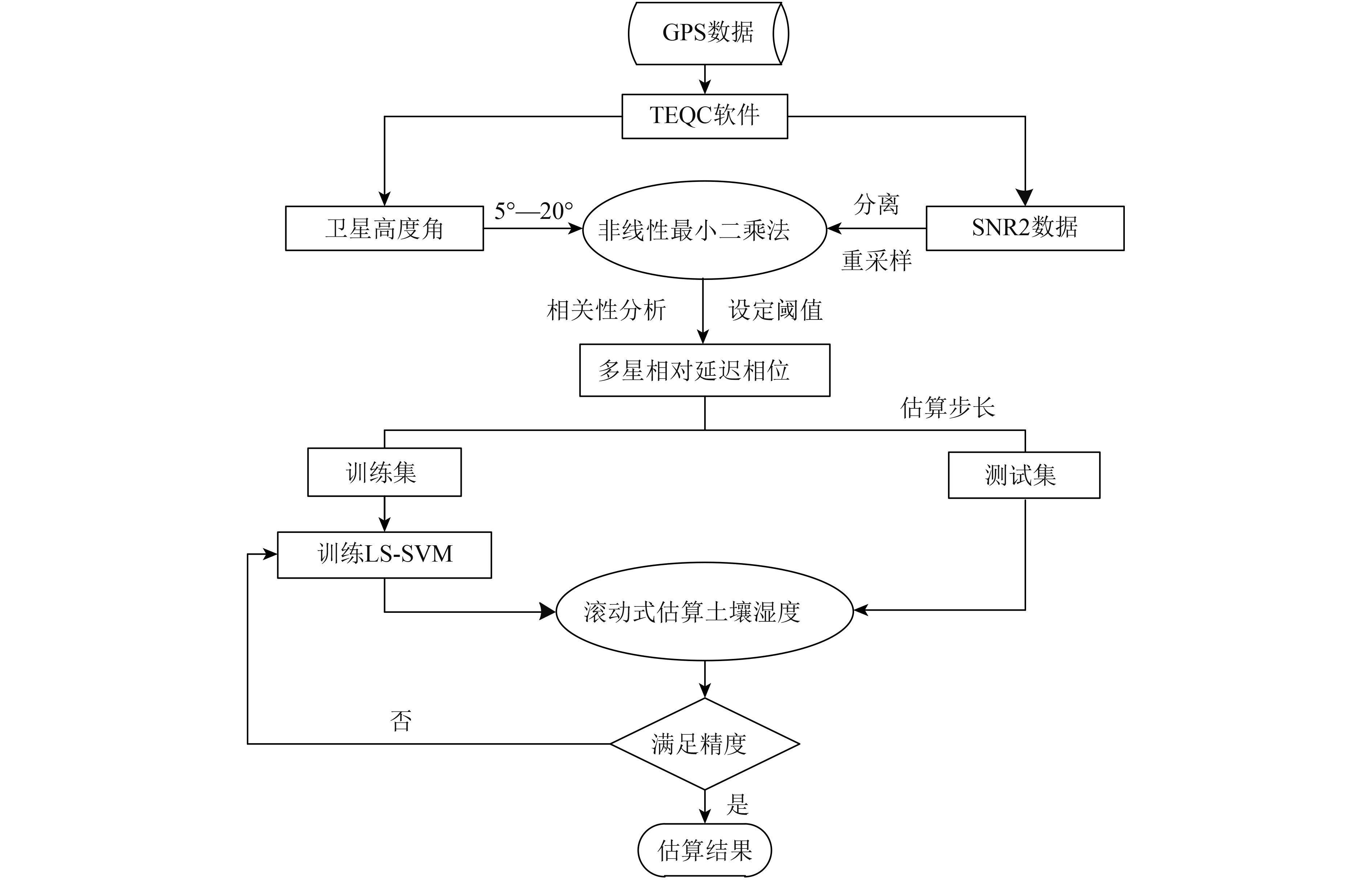
2.3 模型估算流程
本文建模具体过程如下:
(1) 反射信号有效分离。采用TEQC软件解算GPS监测数据得到SNR2值(L2载波),通过二次多项式拟合分离GPS直射和反射信号;
(2) 反射信号重采样。对随历元变化的反射信号进行重采样,转化为与卫星入射高度角正弦值
(3) 参数估计。采用非线性最小二乘算法(Johnson 等,1981)对重采样后的反射信号进行正弦拟合,得到相对延迟相位。同时,考虑到最小二乘算法迭代的步长及其他参数问题,本文利用置信区间算法(Powell和Yuan,1990)进行确定;
(4) 土壤湿度估算模型。通过线性回归方程对相对延迟相位和土壤湿度进行相关性分析,并合理设置相关系数的阈值范围选取有效卫星,进而建立LS-SVM非线性拟合模型;
(5) 滚动式估算。设选定
3 实验分析
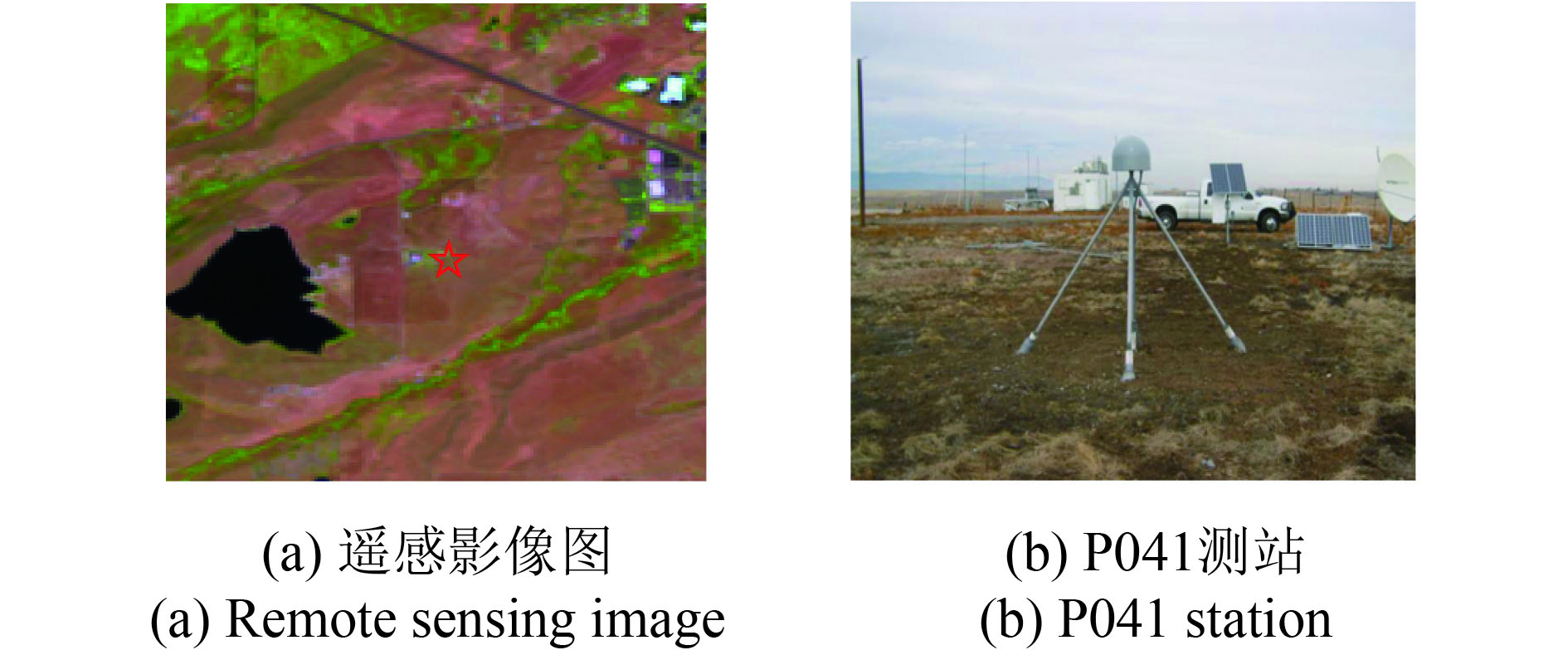
选取美国板块边界观测计划PBO (http://xenon.colorado.edu/portal[2017-10-10])提供的监测数据(P041和P043测站)进行实验。两个测站分别处于西经105.194267°、北纬39.949493°和西经104.185702°、北纬43.881146°,均能够记录L2C观测值,很早就开展土壤湿度分析,具有一定的代表性。已有研究表明,L2C信号的频率对土壤的最大穿透深度为5 cm(Njoku和Entekhabi,1996),由于GPS-IR仅分析来自于低卫星高度角的反射信息,其实际感测深度可能为2.5 cm或更小(Chew 等,2016)。从图3的美国Landsat TM多光谱影像(空间分辨率30 m)和P041测站图可看出,该测站周边地形较为平坦、开阔且植被稀少,主要以草为覆盖植被,有利于土壤湿度监测。站点均采用钢制三角支架安置,接收机型号为TRIMBLE NERT9,采用SCIT的天线罩,天线型号为TRM59800.80。P041测站2011年第67—290 d(共224 d)和P043测站2015年第73—294 d(共222 d)的土壤湿度SMC(Soil Moisture Content)及降雨量如图4所示。图4中,降雨量主要来自于北美土地资料同化系统(NLDAS)产品;每天的土壤水分产品都是通过L2C观测值反演,基于8个或更多卫星轨道的平均值来实现的;土壤湿度值基于GPS卫星相位(phi)的波动来计算,其中SMC = SMCmin + 0.0148 phi,主要是根据STATSGO监测数据集中的剩余水分含量来确定每个点的最小土壤水分值(SMCmin)(Chew 等,2015, 2016)。Larson等(2010)研究表明:采用菲涅耳原理可确定土壤湿度的有效测量区域,GPS信号的菲涅耳区域是一组与卫星高度角、方位角和接收机天线高相关的椭圆;当卫星高度截止角为5°时,有效距离理论最大值距天线中心约45 m。由于PBO天线高度倾向于1.5—2.1 m,每个卫星轨道的感测区域约为120 m2(Larson和Nievinski,2013)。那么,将多个轨道结合起来总感应面积约为1000 m2。
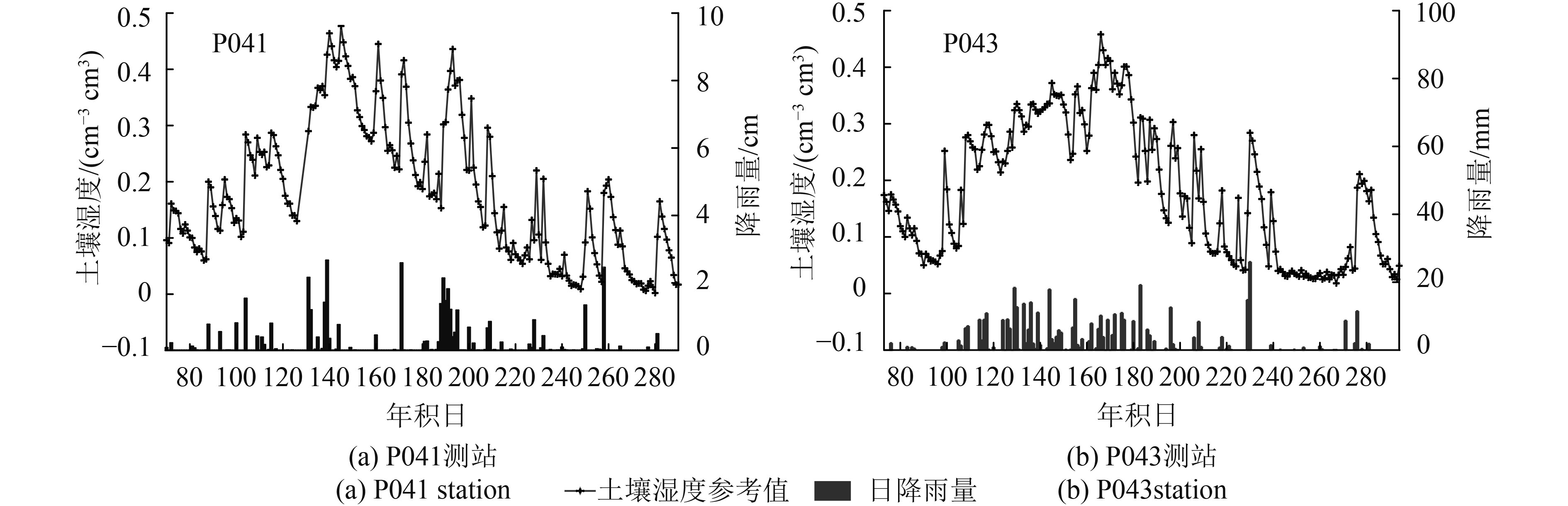
从图4(a)可看出,该时段内显著降水13次,分别为第88、100、104、115、131—132、137—140、143—144、171、186—195、207—211、231—232、250、255—258 d,其中,最大降雨量达到2.67 cm。对应于降水,土壤湿度均明显上升,特别是131—132、137—140和186—195 d。同样,由于连续性降雨,P043测站周边的土壤湿度变化较为剧烈,呈现出非线性和随机性。当降水停止,土壤湿度逐渐减少和回落。可见,降水是土壤湿度变化的主要原因,P041和P043测站的降雨量较为丰富,适合开展土壤湿度研究。
因此,本文分别选取P041测站2011年第67—290 d和P043测站2015年第73—294 d的监测数据,采样率为30 Hz,设置截止卫星高度角为5°—20°。利用TEQC解算GPS接收机监测数据得到SNR2值,经二次多项式拟合分离各卫星的直、反射信号,并采用非线性最小二乘法估算各卫星的相对延迟相位。限于篇幅,试验中仅给出P041测站有效波段的PRN03、06、09、11、14、15、18、21、22、26、31和32号卫星进行分析,各卫星的相对延迟相位与土壤湿度的关系见图5。
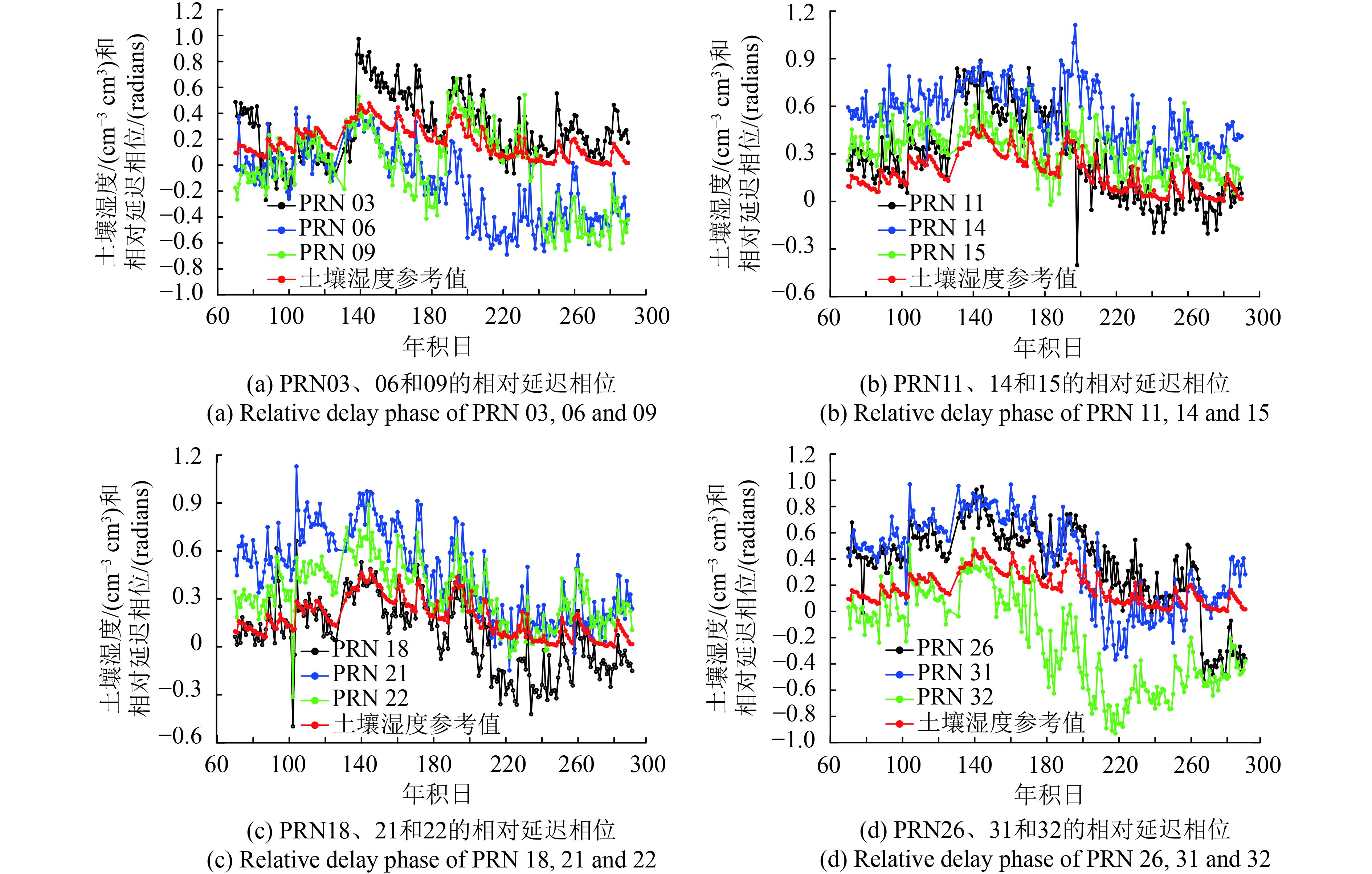
由图5可知,当土壤湿度上升或下降波动时,各卫星的相对延迟相位均能做出响应。对于131—132、137—140和186—195 d,各卫星的相位延迟呈现了较大的浮动,这与持续性降雨造成的土壤湿度急剧上升相关。整个时段内,两个测站部分卫星的相对相位延迟与土壤湿度之间的线性回归方程系数R2(图6)。可见,不同卫星的相对相位延迟与土壤湿度之间的相关性均不一样。进一步对比各卫星发现,不同卫星对于土壤湿度变化的响应模式并不一致,同一卫星的相对延迟相位在不同时段均出现异常跳变现象,这主要是由于在观测过程中卫星相对于GPS天线的几何运动轨迹以及卫星本身的性能不同、地表多路径环境影响所造成的。因此,直接通过某种方法或者手段剔除单颗卫星异常跳变值较为困难,也不利于土壤湿度连续性估算模型的建立。通过多颗卫星融合形成互补,经非线性拟合定权实现土壤湿度估算成为可能。
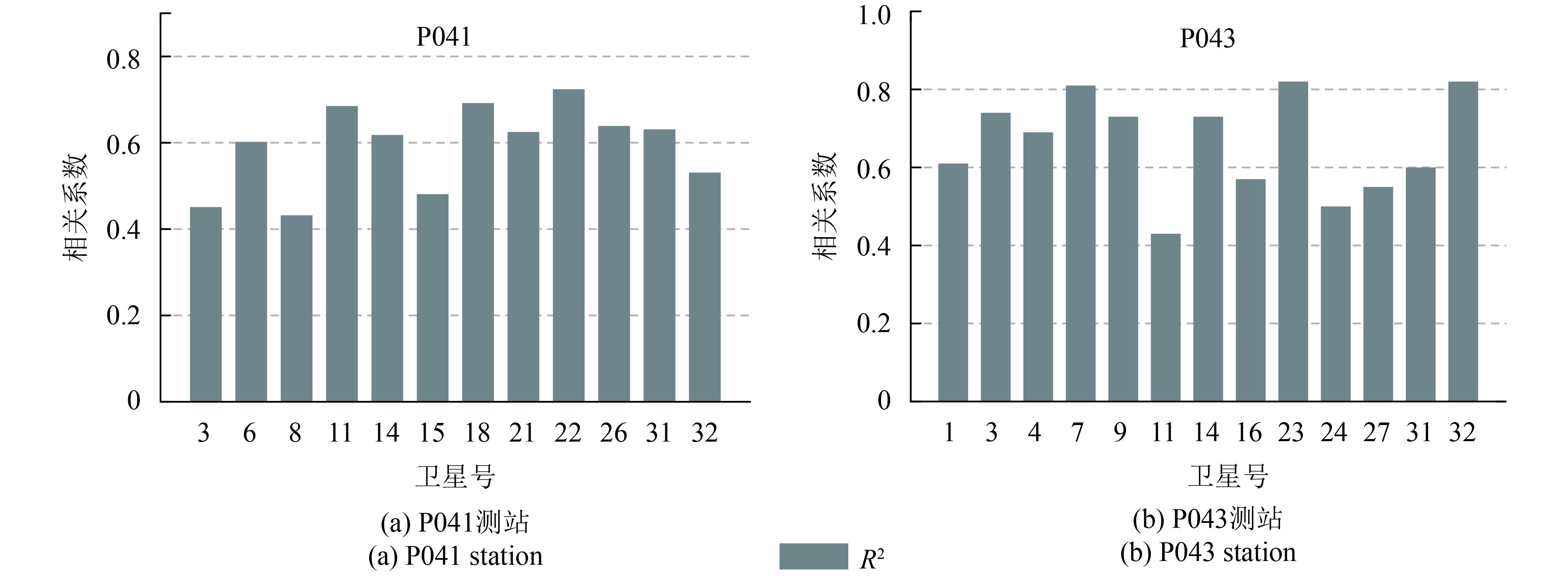
为了验证多卫星融合估算的可行性和有效性,本文设置线性回归方程系数R2大于0.6的阈值范围,分别选取P041测站8颗卫星和P043测站9颗卫星的相对延迟相位建立LS-SVM土壤湿度估算模型,设立3种方案进行对比分析:方案1建立基于单颗卫星的滚动式估算、方案2对方案1各单颗卫星的反演结果取均值(等权平均)、方案3基于多卫星融合的滚动式估算。为了减少建模误差,需要对相对延迟相位进行预处理,将数据统一归化到[−1,1],经模型估算后再还原到原始区间。对于P041测站,以第67—140 d为训练样本,后第141—290 d为测试样本,选取估算步长为1。比如,当估算步长取1,则通过第67—140 d建模来估算第141 d,然后采用第68—141 d建模估算第142 d,以此类推迭代计算,直到估算到第290 d。同理,P043测站采用73—119 d为训练样本,后第120—294 d为测试样本,估算步长为1。以美国板块边界观测计划PBO提供的土壤水分产品作为参考值,各方案的估算结果如图7和图8所示。限于篇幅,仅给出了P041测站的估算结果与土壤湿度之间的线性回归分析(图9)。
从图7和图8可见,采用单颗卫星进行土壤湿度估算,难以准确掌握土壤湿度的变化规律,估算误差基本呈递增趋势;对于土壤湿度波动较大的时段,估算过程极易出现异常跳变现象。特别是土壤湿度值较小的时段,部分卫星的估算结果出现明显的失真现象,如P041测站的14、26和31号卫星。这些主要是由于单颗卫星信号在某时刻某方向受地表多路径环境影响较大,使得有用的土壤湿度反射信息受到干扰,估算过程极易出现异常跳变现象。通过对各卫星的估算结果进行等权平均,估算误差的波动程度仍较为剧烈,如图7的第180—290 d。进一步对比各单颗卫星和方案2的估算误差发现,采用方案2估算的误差变化趋势易受单颗卫星估算误差的影响,而且没有能够有效地抑制估算过程异常跳变值的出现。方案3能够更好的反应土壤湿度的变化趋势,估算误差更为平稳,有效改善了采用单颗卫星进行土壤湿度估算时,估算结果极易出现异常跳变的现象。可见,不同的卫星反映着不同方向的地表环境信息,采用单颗卫星估算难以准确掌握某个区域内土壤湿度信息;综合各卫星的估算结果,在一定程度上抑制了地表多路径环境对土壤湿度估算的影响,采用非线性定权比直接采用等权平均更有优势。
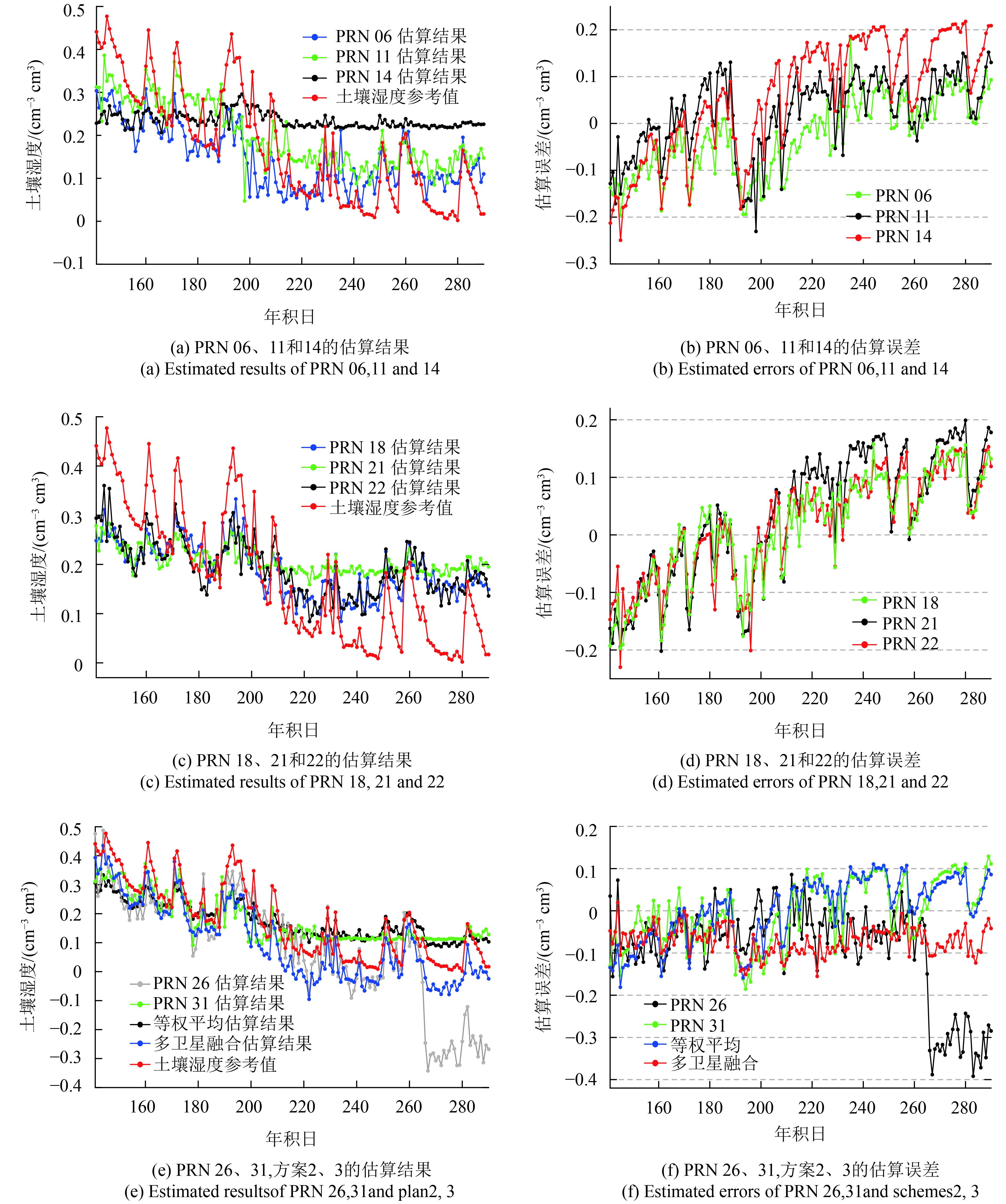
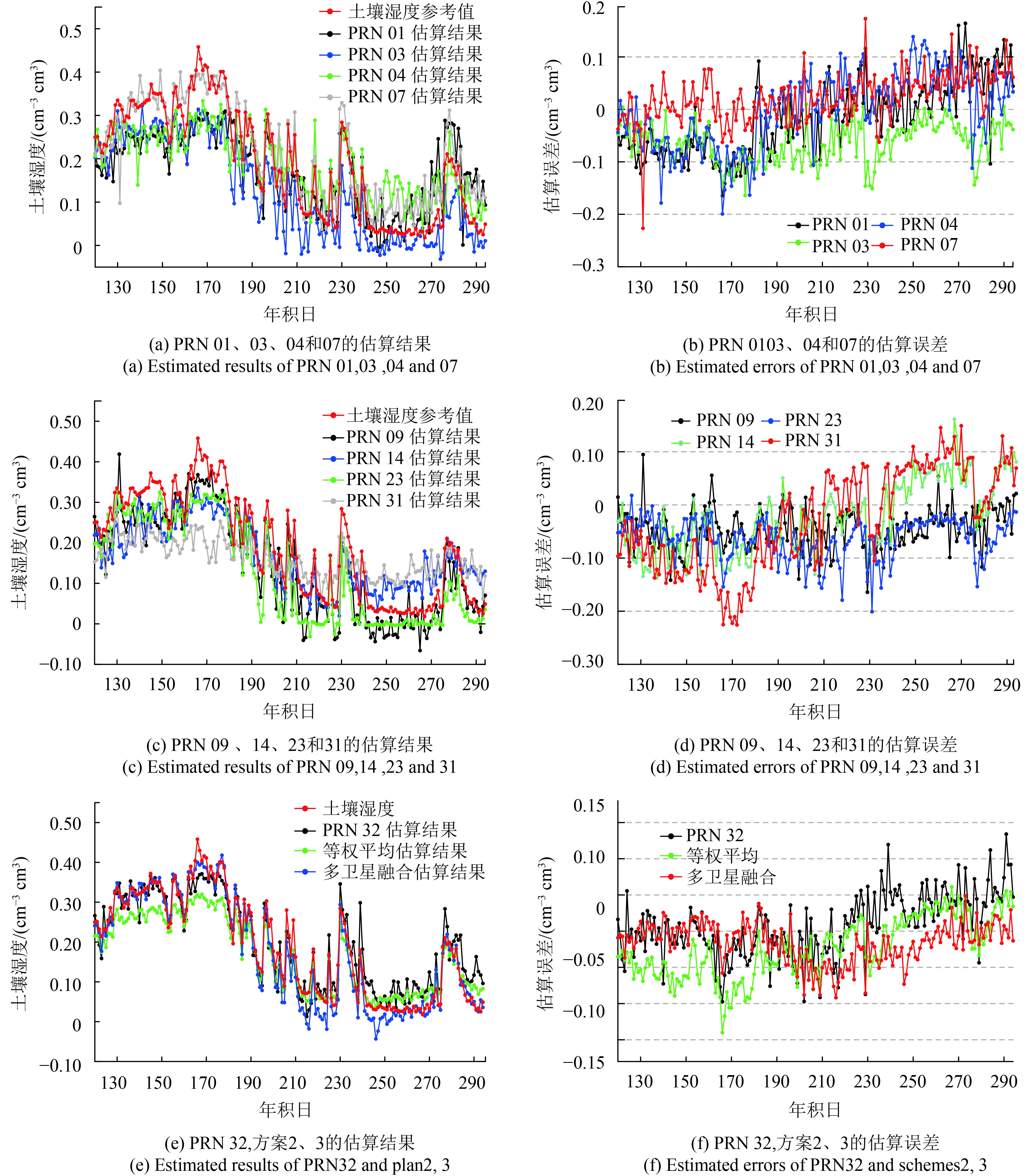
为了进一步综合评定各方案的性能,本文采用R2、均方根误差(RMSE)、平均绝对误差(MAE)和最大误差(MAX)进行评定。限于篇幅,只给出了P041测站部分卫星估算结果的R2(图9)。结合表1和表2发现,方案2和方案3的各项精度指标较为接近,采用方案3的估算结果与土壤湿度之间的R2分别为:0.942和0.962,前者相对于单一卫星至少提高了18.18%;RMSE、MAE分别为0.079和0.032、0.073和0.024,MAX最小。可见,采用等权平均方法和多星融合估算方法相对于单颗卫星,其估算精度均有所提高。结合图7、图8综合对比分析:采用多星融合估算,不仅保证了估算过程局部误差的稳定性,而且相对于等权平均方法更能有效地抑制采用单颗卫星估算时极易出现异常跳变的现象,反演过程不易受单颗卫星的影响。
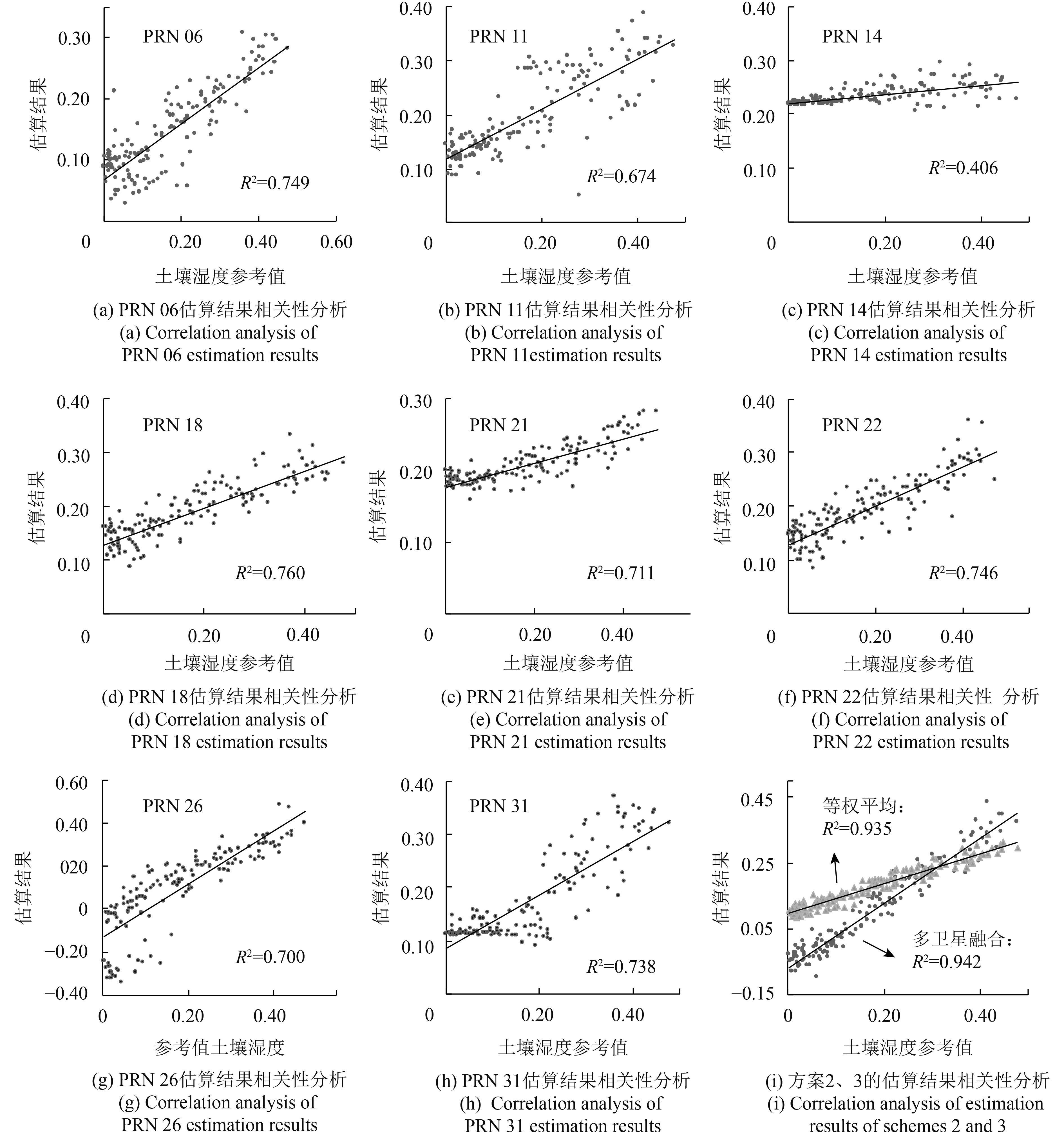
表 1 P041测站各模型土壤湿度估算精度统计表
Table 1 Estimation accuracy of soil moisture in each model with P041
| P041测站 | 等权平均 | 多星融合 | ||||||||
| 6 | 11 | 14 | 18 | 21 | 22 | 26 | 31 | |||
| R2 | 0.749 | 0.674 | 0.406 | 0.760 | 0.711 | 0.746 | 0.700 | 0.738 | 0.935 | 0.942 |
| RMSE | 0.085 | 0.086 | 0.135 | 0.091 | 0.115 | 0.091 | 0.145 | 0.077 | 0.074 | 0.079 |
| MAE | 0.070 | 0.072 | 0.119 | 0.078 | 0.101 | 0.078 | 0.103 | 0.065 | 0.063 | 0.073 |
| MAX | 0.196 | 0.231 | 0.249 | 0.197 | 0.202 | 0.230 | 0.392 | 0.185 | −0.181 | −0.155 |
表 2 P043测站各模型土壤湿度估算精度统计表
Table 2 Estimation accuracy of soil moisture in each model with P043
| P043测站 | 等权平均 | 多星融合 | |||||||||
| 01 | 03 | 04 | 07 | 09 | 14 | 23 | 31 | 32 | |||
| R2 | 0.739 | 0.916 | 0.784 | 0.869 | 0.905 | 0.800 | 0.914 | 0.690 | 0.890 | 0.969 | 0.962 |
| RMSE | 0.072 | 0.074 | 0.070 | 0.052 | 0.060 | 0.070 | 0.074 | 0.097 | 0.044 | 0.047 | 0.032 |
| MAE | 0.060 | 0.064 | 0.058 | 0.040 | 0.050 | 0.059 | 0.063 | 0.084 | 0.035 | 0.040 | 0.024 |
| MAX | −0.165 | −0.164 | −0.199 | −0.227 | −0.164 | 0.161 | −0.201 | −0.226 | 0.134 | −0.140 | −0.092 |
| 注:RMSE、MAE、MAX单位为cm−3·cm3。 | |||||||||||
综上,基于多卫星融合的LS-SVM滚动式估算模型充分融合了各卫星的性能,使得各卫星的相对延迟相位之间形成了互补;不同的卫星在不同时刻反映着不同方向的地表环境信息,通过多星融合在一定程度上有效改善了单颗卫星难以适应地表多路径影响的问题。而且,多卫星融合相对于单一卫星更能适应不同湿度程度的土壤,在估算过程中LS-SVM并未发生过拟合现象,模型的性能也得到了较好的发挥,优于直接对各卫星进行等权平均的结果。
4 结 论
土壤湿度及其变化的准确和长期监测对环境科学研究具有重要意义。针对目前土壤湿度研究更多局限于采用单颗卫星进行估算以及较少涉及机器学习方法,本文从多星融合思路出发,提出了基于多星融合的土壤湿度LS-SVM滚动式估算模型,得出以下结论:
(1) 观测过程中GPS天线受卫星几何运动轨迹和卫星自身性能影响,不同卫星的相对延迟相位对于地表土壤湿度的响应模式均不同,与土壤湿度存在一定的相关性,采用线性回归方程能够较好描述两者之间的关系。通过合理设定相关性的阈值范围实现卫星的有效选取。
(2) 算法充分发挥了LS-SVM在土壤湿度中的优势,能够有效综合了各卫星的性能,通过非线性定权方式实现各卫星相对延迟相位之间的互补,有效改善了采用单颗卫星进行估算时,其结果极易出现异常跳变的现象。而且,相对于等权平均方法,采用多星融合估算模式不易受单颗卫星的相对延迟相位变化趋势的影响。
(3) 算法只需较少的建模数据即可实现较长时间的估算,拟合过程表现较为稳定;采用滚动式能够实现较长时间的估算,估算误差较为平稳。
综上所述,土壤湿度问题可当作一个非线性事件进行处理,多卫星融合模式应用于土壤湿度估算是可行、有效的。下一步工作将对如何确定模型最佳输入变量的长度,并通过在不同环境条件下的多源数据以及融入植被信息、温度、降雨量等变量展开更为深入研究。
志 谢 此次实验的GPS监测数据均可从UNAVCO获得,土壤湿度参考值来自于http://xenon.col-orado.edu/portal[2017-10-10]。在此衷心的感谢PBO H 2 O和UNAVCO。
参考文献(References)
-
Ao M S, Zhu J J, Hu Y J, Zeng Y and Liu Y D. 2015. Comparative experiments on soil moisture monitoring with GPS SNR observations. Geomatics and Information Science of Wuhan University, 40 (1): 117–120, 127. [DOI: 10.13203/j.whugis20130170] ( 敖敏思, 朱建军, 胡友健, 曾云, 刘亚东. 2015. 利用SNR观测值进行GPS土壤湿度监测. 武汉大学学报(信息科学版), 40 (1): 117–120, 127. [DOI: 10.13203/j.whugis20130170] )
-
Bilich A and Larson K M. 2007. Mapping the GPS multipath environment using the signal‐to‐noise ratio (SNR). Radio Science, 42 (6): RS6003 [DOI: 10.1029/2007RS003652]
-
Bishop C M. 2006. Pattern Recognition and Machine Learning. New York: Springer
-
Cardellach E, Fabra F, Rius A, Pettinato S and D’Addio S. 2012. Characterization of dry-snow sub-structure using GNSS reflected signals. Remote Sensing of Environment, 124 : 122–134. [DOI: 10.1016/j.rse.2012.05.012]
-
Chew C, Small E E and Larson K M. 2016. An algorithm for soil moisture estimation using GPS-interferometric reflectometry for bare and vegetated soil. GPS Solutions, 20 (3): 525–537. [DOI: 10.1007/s10291-015-0462-4]
-
Chew C C, Small E E, Larson K M and Zavorotny V U. 2015. Vegetation sensing using GPS-interferometric reflectometry: theoretical effects of canopy parameters on signal-to-noise ratio data. IEEE Transactions on Geoscience and Remote Sensing, 53 (5): 2755–2764. [DOI: 10.1109/TGRS.2014.2364513]
-
Dobson M C, Ulaby F T, Hallikainen M T and El-Rayes M A. 1985. Microwave dielectric behavior of wet soil-Part II: dielectric mixing models. IEEE Transactions on Geoscience and Remote Sensing, GE-23 (1): 35–46. [DOI: 10.1109/TGRS.1985.289498]
-
Ferrazzoli P, Guerriero L, Pierdicca N and Rahmoune R. 2011. Forest biomass monitoring with GNSS-R: theoretical simulations. Advances in Space Research, 47 (10): 1823–1832. [DOI: 10.1016/j.asr.2010.04.025]
-
Hallikainen M T, Ulaby F T, Dobson M C, El-Rayes M A and Wu L K. 1985. Microwave dielectric behavior of wet soil-part 1: empirical models and experimental observations. IEEE Transactions on Geoscience and Remote Sensing, GE-23 (1): 25–34. [DOI: 10.1109/TGRS.1985.289497]
-
Huang XL, Shi L and Suykens J A K. 2014. Asymmetric least squares support vector machine classifiers. Computational Statistics and Data Analysis, 70 : 395–405. [DOI: 10.1016/j.csda.2013.09.015]
-
Jin S G, Zhang Q Y and Qian X D. 2017. New progress and application prospects of Global Navigation Satellite System Reflectometry (GNSS+R). Acta Geodaetica et Cartographica Sinica, 46 (10): 1389–1398. [DOI: 10.11947/j.AGCS.2017.20170282] ( 金双根, 张勤耘, 钱晓东. 2017. 全球导航卫星系统反射测量(GNSS+R)最新进展与应用前景. 测绘学报, 46 (10): 1389–1398. [DOI: 10.11947/j.AGCS.2017.20170282] )
-
Johnson M L, Correia J J, Yphantis D A and Halvorson H R. 1981. Analysis of data from the analytical ultracentrifuge by nonlinear least-squares techniques. Biophysical Journal, 36 (3): 575–588. [DOI: 10.1016/S0006-3495(81)84753-4]
-
Larson K M, Braun J J, Small E E, Zavorotny V U, Gutmann E D and Bilich A L. 2010. GPS multipath and its relation to near-surface soil moisture content. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 3 (1): 91–99. [DOI: 10.1109/JSTARS.2009.2033612]
-
Larson K M and Nievinski F G. 2013. GPS snow sensing: results from the Earth Scope Plate Boundary Observatory. GPS Solutions, 17 (1): 41–52. [DOI: 10.1007/s10291-012-0259-7]
-
Le Hégarat-Mascle S, Zribi M, Alem F, Weisse A and Loumagne C. 2002. Soil moisture estimation from ERS/SAR data: toward an operational methodology. IEEE Transactions on Geoscience and Remote Sensing, 40 (12): 2647–2658. [DOI: 10.1109/TGRS.2002.806994]
-
Martin-Neira M. 1993. A passive reflectometry and interferometry system (PARIS): application to ocean altimetry. ESA Journal, 17 (4): 331–355.
-
Njoku E G and Entekhabi D. 1996. Passive microwave remote sensing of soil moisture. Journal of Hydrology, 184 (1/2): 101–129. [DOI: 10.1016/0022-1694(95)02970-2]
-
Peng X F, Wan W, Li F and Chen X W. 2017. The suitability analysis of soil moisture retrieval using GNSS-R technology. Journal of Remote Sensing, 21 (3): 341–350. [DOI: 10.11834/jrs.20176198] ( 彭学峰, 万玮, 李飞, 陈秀万. 2017. GNSS-R土壤水分遥感的适宜性分析. 遥感学报, 21 (3): 341–350. [DOI: 10.11834/jrs.20176198] )
-
Powell M J D and Yuan Y. 1990. A trust region algorithm for equality constrained optimization. Mathematical Programming, 49 (1/3): 189–211. [DOI: 10.1007/BF01588787]
-
Rodriguez-Alvarez N, Bosch-Lluis X, Camps A, Vall-Llossera M, Valencia E, Marchan-Hernandez J F and Ramos-Perez I. 2009. Soil moisture retrieval using GNSS-R techniques: Experimental results over a bare soil field. IEEE Transactions on Geoscience and Remote Sensing, 47 (11): 3616–3624. [DOI: 10.1109/TGRS.2009.2030672]
-
Sabater J M, Rüdiger C, Calvet J C, Fritz N, Jarlan L and Kerr Y. 2008. Joint assimilation of surface soil moisture and LAI observations into a land surface model. Agricultural and Forest Meteorology, 148 (8/9): 1362–1373. [DOI: 10.1016/j.agrformet.2008.04.003]
-
Suykens J A K and Vandewalle J. 1999. Least squares support vector machine classifiers. Neural Processing Letters, 9 (3): 293–300. [DOI: 10.1023/A:101862860]
-
Tsang L, Kong J A and Shin R T. 1985. Theory of Microwave Remote Sensing. London: Wiley-Interscience
-
Wu X R, Li Y and Xu J. 2012. Theoretical study on GNSS-R vegetation biomass//Proceedings of 2012 IEEE International Geoscience and Remote Sensing Symposium. Munich, Germany: IEEE: 6380-6383 [DOI: 10.1109/IGARSS.2012.6352719]
-
Xie S F, Liang Y J, Zheng Z T and Liu H F. 2017. Combined forecasting method of landslide deformation based on MEEMD, approximate entropy, and WLS-SVM. ISPRS International Journal of Geo-Information, 6 (1): 5 [DOI: 10.3390/ijgi6010005]
-
Yan S H, Gong J Y, Zhang X X and Li D X. 2011. Ground based GNSS-R observations for soil moisture. Chinese Journal of Geophysics, 54 (11): 2735–2744. [DOI: 10.3969/j.issn.0001-5733.2011.11.003] ( 严颂华, 龚健雅, 张训械, 李冻秀. 2011. GNSS-R测量地表土壤湿度的地基实验. 地球物理学报, 54 (11): 2735–2744. [DOI: 10.3969/j.issn.0001-5733.2011.11.003] )
-
Yang L X, Yang S Y, Li S J, Zhang R, Liu F and Jiao L C. 2015. Coupled compressed sensing inspired sparse spatial-spectral LSSVM for hyperspectral image classification. Knowledge-Based Systems, 79 : 80–89. [DOI: 10.1016/j.knosys.2015.01.006]
-
Ye X F. 2016. Research on Processing Method of GNSS Station Environment Error and Its Application Using SNR Data. Wuhan: China University of Geosciences (Wuhan). (叶险峰. 2016. 基于GNSS信噪比数据的测站环境误差处理方法及其应用研究. 武汉: 中国地质大学(武汉))
-
Zavorotny V U, Larson K M, Braun J J, Small E E, Gutman E D and Bilich A L. 2010. A physical model for GPS multipath caused by land reflections: toward bare soil moisture retrievals. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 3 (1): 100–110. [DOI: 10.1109/JSTARS.2009.2033608]
-
Zhang S C, Dai K Y, Liu K, Hou X W and Zhao Y H. 2016. Research of GPS-MR on snow depth monitoring. Progress in Geophysics, 31 (4): 1879–1884. [DOI: 10.6038/pg20160461] ( 张双成, 戴凯阳, 刘凯, 侯晓伟, 赵迎辉. 2016. GPS-MR技术用于降雪厚度监测研究. 地球物理学进展, 31 (4): 1879–1884. [DOI: 10.6038/pg20160461] )


