
|
收稿日期: 2017-10-13
基金项目: 国家自然科学基金(编号:41701390);安徽省教育厅自然科学基金(编号:KJ2017A037);安徽省地理信息工程中心开放课题(编号:Y01002577);安徽大学博士科研启动经费(编号:J01003226)
第一作者简介: 马晓双,1988年生,男,讲师,研究方向为极化雷达遥感影像处理与解译。E-mail:mxs.88@163.com
中图分类号: TP751
文献标识码: A
|
摘要
针对全极化合成孔径雷达PolSAR(Polarimetric Synthetic Aperture Radar)影像相干斑噪声严重的问题,提出了一种结合相似块匹配和线性最小均方误差原理的去噪方法。该方法首先在原始影像上实现相似块组的匹配,进而利用线性最小均方误差滤波器对影像块组进行滤波得到初始去噪结果;然后,同时利用原始影像和初始去噪影像的信息进行相似块组的重新匹配,并再次利用线性最小均方误差原理对重匹配影像块进行去噪,得到影像最终的去噪结果。利用模拟的PolSAR影像和高分三号卫星PolSAR影像进行了算法效果的验证。结果表明,去噪算法在显著抑制影像噪声水平的同时,也能较好地保持影像的边缘和极化特性等细节信息。
关键词
极化合成孔径雷达, 相干斑滤波, 相似块匹配, 线性最小均方误差滤波, 非局部均值
Abstract
Synthetic Aperture Radar (SAR) systems are capable of capturing images of the earth in day and night and for almost all weather conditions. Polarimetric SAR (PolSAR), which focuses on emitting and receiving complete polarized radar waves to characterize observed targets, is an advanced form of SAR. PolSAR data have unique advantages in obtaining land cover information in comparison with optical remote sensing data, thereby resulting in their wide use in many areas. However, the SAR data are inherently affected by speckle noise. The presence of speckles complicates the PolSAR image interpretation and land surface parameter inversion. Therefore, despeckling is an essential procedure in most cases before using SAR images to obtain land cover information. In the traditional methods based on the linear minimum mean square error (LMMSE) filter, a group of homogeneous image pixels is first selected in a local window to obtain precise filter parameters in the LMMSE estimator. The LMMSE estimator is then generated from the values of the selected pixels and is saved as the filtered value of the pixel being processed. These methods assume that all of the selected pixels are absolutely homogeneous pixels with respect to the processed pixel, which is insufficiently reliable. In addition, most of these methods have limitations, such as a limited selection range of pixels, which are only compared with the characteristics of their own, thereby possibly producing a biased or inferior estimation of the filter parameters in the estimator. In this study, we proposed a similar patch matching and LMMSE filter combined with a PolSAR despeckling method based on the 3D block matching-based algorithm. The main idea behind the proposed method is to select additional similar pixels in the nonlocal area to improve the performance of the LMMSE estimator. The main process of the proposed method is as follows: first, the similar patches in a nonlocal window for each target patch are selected to form a patch group, and the LMMSE filter is used to filter all the pixels in the group. Second, an aggregation step is utilized to estimate the pixels that have been clustered into several groups. The patch matching process is used again to group similar patches by considering the information of the original and basic estimated images. Finally, a collaborated LMMSE filter and an aggregation step are undertaken to filter the image. The experiments on the simulated PolSAR and two real PolSAR images acquired by the GF-3 satellite revealed the positive despeckling performances of the proposed method. The speckle is reduced to a large degree, and the image details, such as the edges and strong point targets, are effectively preserved.
Key words
polarimetric synthetic aperture radar, speckle filtering, similar patches matching, linear minimum mean square error filter, nonlocal means
1 引 言
全极化合成孔径雷达PolSAR(Polarimetric Synthetic Aperture Radar)系统具有全天时、全天候对地观测的能力,能同时发射、接收水平及垂直的极化雷达波,因此能够获取地物丰富的后向散射信息,已在诸多行业领域得到广泛应用。特别是,中国于2016年发射了国内首颗民用全极化SAR卫星—高分三号,进一步推动了PolSAR的应用前景。然而,由于成像机理的限制,使得PolSAR影像不可避免存在相干斑噪声。相干斑严重降低了SAR影像的质量,也制约了利用SAR数据进行地物分类和场景解译的精确性(Lee 等,1999)。因此,对于PolSAR数据的后续应用而言,相干斑滤波是必不可少的预处理程序。
全极化SAR数据的噪声既存在于每个极化通道的强度数据上,也存在于不同极化间的相位差数据上。并且,强度数据受到乘性噪声的影响,而其他数据则受到一种乘性和两种加性噪声的共同影响(Lopez-Martínez和Fabregas,2003),这使得全极化SAR的去噪问题要比SAR的强度或振幅数据去噪要复杂的多。早期的全极化SAR去噪的方法大都是基于Novak等人(1993)提出的极化白化滤波器。Lee等人(1999)提出了一种基于线性最小均方误差LMMSE(Linear Minimum Mean Square Error)原则的PolSAR去噪算法(增强Lee滤波)。这一方法极大推动了对极化SAR去噪的研究,也引领了之后一系列基于LMMSE滤波器的算法(Lee 等,2006;Vasile 等,2006;Ma 等,2015)。除此之外,各向异性扩散算法(Ma 等,2015)、模拟退火算法(Schou和Skriver,2001)、基于二叉树的算法(Alonso-González 等,2012)、变分正则化算法(Nie 等,2015)等也被应用于极化SAR去噪。近年来,基于非局部均值NLM(Nonlocal Means)思想的算法已成为了PolSAR影像去噪的研究热点(Chen 等,2011;杨国辉,2012;陈建宏 等,2014),并取得了较好的去噪效果。NLM算法最先应用于数字图像处理(Buades 等,2005),其基本思想是:认为影像中往往都会存在重复出现的或相似的影像块,因此像素的滤波结果可由其非局部窗口内的像素加权平均得到,而其中每一个像素的权重根据其邻域块与待处理像素邻域块的整体差异性计算获得,差异越小,权重越大。
需要指出的是,受到NLM算法思想的启发,Dabov等人(2007)创新性地提出了一种3维块匹配滤波BM3D(3D Block Matching)的数字图像去噪算法。BM3D算法的基本过程是,首先对原始影像上的每一个影像块搜索相似块,形成相似块组,对组内的所有块进行滤波得到初始去噪影像;然后,在初始去噪影像上再次进行组建相似块的过程,并借助原始和初始去噪影像信息协同实现最终的去噪。在原始BM3D改进的基础之上,Parrilli等人(2012)将这一算法推广应用于单极化SAR去噪之中,并取得了明显优于传统局部滤波器的去噪效果。然而,到目前为止,BM3D处理框架下的全极化SAR影像去噪算法还十分罕见。
本文借鉴单极化SAR的BM3D算法思想,提出一种结合相似块匹配及LMMSE滤波原理的PolSAR去噪方法。该方法首先在原始影像上利用全极化信息进行相似块匹配,并借助LMMSE原则实现组内所有影像块的去噪;再通过重叠块聚集的过程得到影像的初始去噪结果;之后,同时借助原始影像和初始估计的信息实现相似块再匹配,并再次利用LMMSE滤波原则和重叠块聚集的过程实现影像的最终去噪。
2 LMMSE滤波器和相似块匹配
2.1 LMMSE滤波器
在满足散射互易性的条件下,全极化SAR数据可用
| $y = x \cdot n$ | (1) |
式中,
| ${\sigma _{\rm v}} = \sqrt {1 /L} $ | (2) |
以上的乘性噪声特点是LMMSE滤波器(Lee,1980)的理论基础。LMMSE滤波器认为像素的估计值
| $\hat x = a\bar y + by$ | (3) |
式中,
| $\hat x = \overline y + b(y - \overline y)$ | (4) |
其中,
| $b = \frac{{{\mathop{var}}(x)}}{{{\mathop{var}}(y)}} \approx \frac{{{\mathop{var}}(y) - {{\bar y}^2}{\sigma _{\rm v}}^2}}{{(1 + {\sigma _{\rm v}}^2){\mathop{var}}(y)}}$ | (5) |
式中,
Lee等人(1999)首次将LMMSE估计器应用到PolSAR数据的去噪当中(增强Lee滤波),得到如下去噪方式
| $\hat{{ C}} =\bar{ { C}} + b({C} -\bar{ { C}})$ | (6) |
式中,
很显然,在LMMSE滤波器中,先验均值与先验方差估计的准确与否直接影响到滤波器的去噪效能。为了获得更精准的估计,传统LMMSE滤波器的做法都是在局部窗口内选取与目标像素相似的像素。这些做法都假设所选样本像素与目标像素高度同质,但影像上不可避免存在的细节信息使得这些前提假设并不完全合理(Touzi,2002)。另外,由于传统局部滤波器的自身限制,使得参与滤波的样本较少。从统计的角度来看,过少的样本会使得估计产生偏差。因此,目前国内外学者针对LMMSE滤波器提出的改进算法主要关注的是如何准确地搜寻较多的相似像素,以保证LMMSE估计器的估计精度。
2.2 相似块匹配
本文提出的去噪算法的基本思想是借助相似块匹配的方式在非局部范围内搜寻相似图块,以提升LMMSE滤波器的整体估计精度。借鉴BM3D方法的思想,本文提出的算法涉及两次相似块匹配的过程。对于初始影像的相似块匹配而言,可使用基于复Wishart分布的似然检验法(Conradsen 等,2003)来度量图块间的极化相似度。在满足散射互易性条件下,PolSAR极化协方差矩阵C服从如下的复Wishart分布(Goodman,1963)
| $P({C}|\sum) = \frac{{|{C}{|^{L - 3}}\exp \{ - L \cdot {\rm{tr}}(\sum {^{ - 1}} {C})\} }}{{Q(L)|\sum {{|^L}} }}$ | (7) |
式中,
| $Q(L) = \frac{{{{\text{π}} ^3}\Gamma (L)\Gamma (L - 1)\Gamma (L - 2)}}{{{L^{3L}}}}$ | (8) |
式中,
对于两个服从复Wishart分布的极化协方差矩阵X和Y,给定假设条件
| $Q = \frac{{{{(n + m)}^{3(n + m)}}}}{{{n^{3n}}{m^{3m}}}}\frac{{|{X}{|^m}|{Y}{|^n}}}{{|{X} + {Y}{|^{m + n}}}}$ | (9) |
式中,
| $\ln Q = 6\ln 2 + \ln |{X}| + \ln |{Y}| - 2\ln |{X} + {Y}|$ | (10) |
式中,
本算法在第二次块匹配过程中,同时借助原始影像和初始去噪影像的信息来完善匹配的精度。这一过程中所采用的相似性测度值可表示为
| $D(p, q) = P({C}_p^* = {C}_q^*|{C}_p, {C}_q, {S})$ | (11) |
式中,
| $D(p, q) = P({C}_p^* = {C}_q^*|{C}_p, {C}_q)P({C}_p^* = {C}_q^*|{S})$ | (12) |
显然,对于式(12)右边第一项,可采用式(10)的方式计算获得;对于第二项,本算法采用Kullback-Leibler测度进行计算。Kullback-Leibler测度的思想是计算两个概率分布的差异度以获取像素的相似性。基于对称Kullback-Leibler散度的全极化距离度量方式为(Hondt 等,2013)
| $P({C}_p^* = {C}_q^*|{S}) = {\rm{tr}}[{({S}_p)^{ - 1}}{S}_q] + {\rm{tr}}[{S}_p{({S}_q)^{ - 1}}] - 6$ | (13) |
最终可推得,式(12)所示的第二次块匹配的相似测度值仍为负值,值越大,代表影像块越相似。通过大量实验,本文提出的去噪算法的第二次块匹配相似度阈值设为–30时能取得较优的去噪效果。
3 结合相似块匹配和LMMSE滤波器的PolSAR去噪方法
本文提出的结合LMMSE滤波器和相似块匹配策略的PolSAR去噪算法大致流程如图1所示。算法由初始估计和最终估计两大部分组成。
3.1 初始估计
(1) 相似块匹配:对于原始影像上的任一图块,借助基于Wishart似然比检验法(式(10))以及似然比阈值,在非局部窗口内搜寻其相似图块,如果图块间相似测度大于阈值,则将该图块视为相似块。最终,影像上的所有图块组成一个3维的相似块组。
(2) LMMSE滤波:对于每个相似块组,计算该组所有图块对应位置像素的极化协方差矩阵的均值
(3) 重叠块聚集:需要注意的是,在块匹配过程中,任一影像块都有可能被视作相似块而出现在数个不同的块组中,从而出现对同一像素的数个估计值。因此,需要对每个像素的多个估计值设定合适的权重,进而利用加权平均的方式得到该像素的初始估计。由于参数
| ${W_i} = (1 - {b_i})/\sum\limits_{j = 1}^N {(1 - {b_j})} $ | (14) |
式中,N代表该像素所在的图块被当做相似块出现在N个组中,
3.2 最终估计
(1) 相似块重匹配:根据式(12),同时利用原始影像
(2) 协同LMMSE滤波:原始LMMSE滤波器中为了计算样本先验方差和先验均值而采用含噪声样本近似估计的方式,这一做法对于噪声较强的影像难以做到较高的估计精度。由于本方法初始去噪的过程已经大幅滤除了影像的噪声,故可直接在初始去噪影像上更精确地计算这两个参数。对于任一图块构建出的两个相似块组,首先计算初始估计块组内所有图块对应位置像素的极化协方差矩阵的均值
(3) 重叠块聚集:与初始估计过程相同,同一影像块可能会被视作相似块而出现在数个不同的块组中,从而出现对同一像素的数个估计值。对于这种情况,同样采用初始估计中的加权平均处理方式。至此,便实现了对整幅影像的最终去噪。


4 实验结果与分析
为了验证本文提出的算法的滤波效果,本文采用一幅模拟的PolSAR影像和两幅高分三号卫星PolSAR影像进行去噪的实验。为了实现对比,实验部分也展示了增强Lee滤波(Lee 等,1999)、IDAN滤波(Vasile 等,2006)及PolSAR NLM滤波算法(Chen 等,2011)的去噪效果。为了达到去噪与影像细节保持的平衡,本文所有实验中增强Lee滤波的滤波窗口大小设为
4.1 模拟实验
模拟实验部分利用Monte Carlo方法(Lee和Pottier,2009)生成了一幅4视的PolSAR影像。为了定量评价去噪算法的效果,本文采用等效视数ENL(Equivalent Number of Looks)(Foucher 等,2000)和基于平均比的边缘保持度EPD-ROA(Edge Preservation Degree based on Ratio of the Average)(Feng 等,2011)这两个指数。
ENL指数定义为
| ${\rm{ENL = }}{1 / {{\sigma ^2}}}$ | (15) |
式中,
| ${\rm{EPD - ROA}} = \frac{{\displaystyle\sum\limits_{i = 1}^m {|{u_{{\rm D}1}}(i)/{u_{{\rm D}2}}(i)|} }}{{\displaystyle\sum\limits_{i = 1}^m {|{u_{{\rm O}1}}(i)/{u_{{\rm O}2}}(i)|} }}$ | (16) |
式中,m代表影像的总像素数目,

表 1 模拟影像的滤波定量评价结果
Table 1 Quantitative assessment results on the simulated image
| 增强Lee滤波 | IDAN | PolSAR NLM | 本文算法 | |
| ENL | 41.2 | 39.3 | 80.1 | 76.7 |
| EPD-ROA | 0.66 | 0.83 | 0.79 | 0.91 |
图2展示了几种去噪算法的处理结果,本文实验部分所有PolSAR影像均采用Freeman分解(Freeman和Durden,1998)后的三分量进行彩色合成。增强Lee滤波在较大程度上抑制了影像的噪声;然而,仔细观察可以发现,这一算法处理后影像呈现出一定的斑块效应,直接导致一些细小地物及边缘受到模糊。产生这一问题的原因在于,该算法在滤波的过程中采用了一种选择滤波窗口方向的策略,而非通常采用的方形窗口。和增强Lee滤波相比,虽然IDAN方法明显能够更好地保持影像的边缘和细节信息,但表1所示的ENL显示出该方法对噪声的抑制能力要略微差于增强Lee滤波。很显然,和前面两种传统的局部滤波器相比,PolSAR NLM滤波方法在噪声抑制方面有了质的提升;然而,可以较明显观察到的是,PolSAR NLM滤波方法存在着一定的过平滑问题。相比之下,本文提出的去噪方法虽然ENL指数略微低于PolSAR NLM算法,但影像的边缘和细节地物都得到了较好地保持。
4.2 真实实验
表 2 真实影像的滤波定量评价结果
Table 2 Quantitative assessment results on the real images
| 增强Lee滤波 | IDAN | PolSAR NLM | 本文方法 | ||
| 影像Ⅰ | ENL | 24.4 | 23.9 | 33.7 | 27.8 |
| EPD-ROA | 0.65 | 0.72 | 0.60 | 0.81 | |
| 影像Ⅱ | ENL | 22.0 | 23.1 | 31.4 | 29.6 |
| EPD-ROA | 0.57 | 0.68 | 0.62 | 0.66 | |
实验部分所采用的两幅真实PolSAR影像分别为中国高分三号卫星全极化条带Ⅰ成像模式和全极化条带Ⅱ成像模式下获取的影像,两幅影像都为单视影像。其中,全极化条带Ⅰ成像模式影像的空间分辨率为8 m, 全极化条带Ⅱ成像模式影像的空间分辨率为25 m。
图3展示了几种去噪算法对高分3号全极化条带Ⅰ影像的去噪结果。可以看到,这幅影像场景较为复杂,既包括以奇次散射为主的水体,也包含以体散射为主的森林以及散射机制较为混杂的城区。对于这类影像,鲁棒的去噪方法应当在削弱噪声的同时保持影像大部分的细节信息。很显然,和模拟实验结果一样,PolSAR NLM算法的噪声抑制能力在4种算法当中表现最佳,但是过平滑问题依然是其最大的缺点。特别是,处理后影像城区部分一些纹理(主要是细小的道路)以及部分强散射点目标丢失。相反,本文提出的算法虽然噪声去除能力不及PolSAR NLM,但细节保持能力有了较大的提升。另外,增强Lee滤波处理后的影像仍然存在着斑块效应,导致边缘和点目标的丢失;而IDAN虽然有着不错的细节保持能力,但其ENL指标在4种方法中最低。
噪声的存在既会降低影像的质量,也会严重降低后续参数反演和地物解译的精确性。鲁棒的去噪方法处理后的PolSAR影像进行地物分类往往会显著提高解译的精度,因其能够显著地削弱相干斑水平,并扩大地类与地类间的差异性。为了揭示上述现象,实验部分首先对原始及各幅滤波影像进行极化分解得到各自Cloude分解(Cloude和Pottier,1996)的3个参数图像(极化散射熵参数H,反熵参数A,平均alpha角参数


很明显可以观察到,几种滤波方法由于抑制了噪声水平从而削弱了同类地物间的极化特性的波动性,使得处理后类内像素分布更加聚集;并且,类间像素的可区分性也得到了增强,特别是PolSAR NLM及本文提出的算法处理的结果更为明显。除此之外,可以观察到的是,在本文提出的算法滤波后的影像上,水体和植被类型像素的分布较为密集,而城区像素却呈现出明显分散的状态。其主要原因是:城区内往往既包括形状、分布方位不一的建筑,也包括道路及树木等其他对象,这使得这一区域的散射机理相当复杂,呈现较大随机性。以上恰恰说明,本文的去噪方法在明显抑制相干斑的同时,能够保持影像复杂的细节信息。
对于海上船只目标检测等实际应用而言,影像上的强散射点目标往往是十分值得关注的对象;并且,不同于一般的分布式目标,点对象并不满足完全发育噪声的条件。因此,理论上来讲,滤波算法应当尽可能地保持这些对象的原始极化信息。为了客观评价算法对点目标的保持能力,实验部分选取了图3(a)中海面上一个强散射点船只目标像素(红色箭头所示),并借助图5中的极化响应图(van Zyl 等,1987)来展现不同影像上该像素的极化响应特性。极化响应图的绘制过程就是根据PolSAR影像上任一像素的极化协方差矩阵可推得任一方位角及任一椭圆角条件下该像素的后向散射功率。由图5可明显地看出,IDAN及本文提出的算法滤波影像上该点对象的极化响应和点对象理想的极化响应极为贴近,而其他两种方法则或多或少改变了该对象的极化性质。

图6展示了几种去噪算法对高分3号全极化条带Ⅱ成像模式影像的去噪结果。和之前的实验结果相似,增强Lee滤波和IDAN算法难以显著地抑制影像的噪声水平,而且,增强Lee滤波处理后的影像斑块效应较为明显,而IDAN算法处理后影像上残留有许多低值噪声点。PolSAR NLM滤波方法再次展现出了优秀的噪声抑制能力,但处理后的影像不可避免地出现了过平滑的问题。本文提出的算法虽然ENL指标不如PolSAR NLM方法,但EPD-ROA指标反映出本文算法在边缘和细节保持方面相比于前者的优势性。

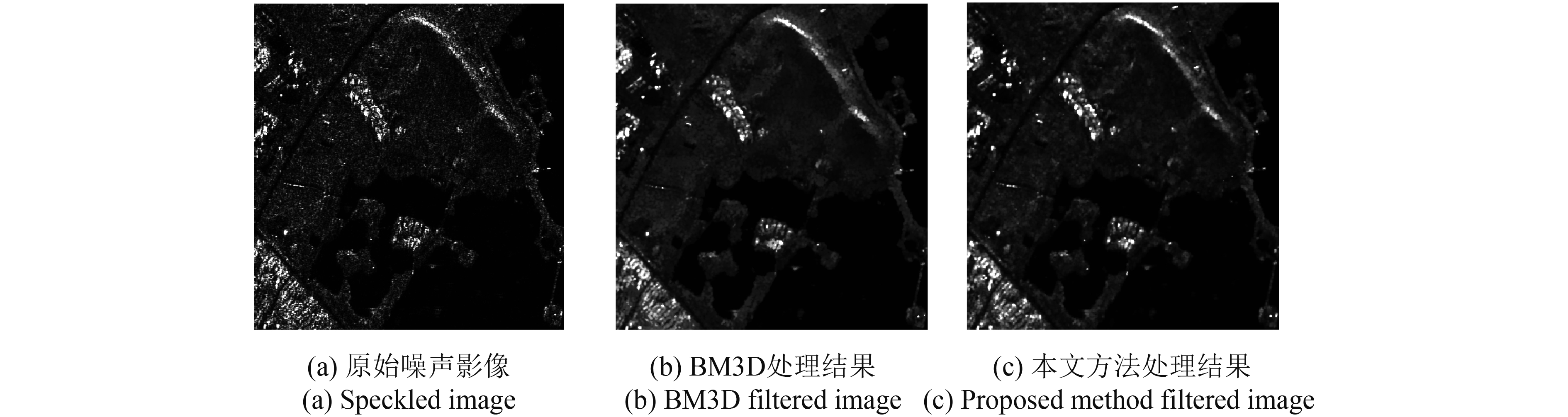
为了进一步表现本文方法的去噪优势,本文首先对原始全极化影像进行整体去噪,然后单独显示HH极化的去噪结果,并将其同单极化SAR BM3D算法(Parrilli 等,2012)处理的结果进行对比。由图7可以观察到,和单极化SAR的BM3D算法相比,由于本文方法在相似图块搜索匹配的过程中利用到了更多的极化信息,所以能够更好地保持影像的细节信息。
和传统的局部空间域滤波器相比,基于图块的非局部去噪方法虽然去噪效果往往占优,但运算效率一直是该类算法的短板。为了探究这一问题,表3列出了本文提出的方法及几种对比算法对两幅真实PolSAR影像处理时间的对比。显然可以看出,基于图块的非局部去噪方法(即PolSAR NLM方法和本文方法)的效率要明显劣于局部滤波算法;又由于本文方法存在两次相似块匹配的过程,因此其处理效率最低。由此可见,采用更高效的相似块匹配机制以提升本文算法的运行效率是未来值得研究的方向之一。
表 3 各去噪算法的处理时间对比
Table 3 Comparison of the processing time of the different despeckling methods
| /s | |||||
| 影像大小 | 增强Lee滤波 | IDAN | PolSAR NLM | 本文方法 | |
| 影像Ⅰ | 3125×4041 | 30.1 | 44.2 | 89.8 | 166.4 |
| 影像Ⅱ | 3886×3650 | 32.7 | 47.0 | 97.4 | 175.5 |
5 结 论
传统基于LMMSE的极化SAR去噪方法在样本选取过程中通常将窗口限制于较小的范围内,且难以保证样本像素与待处理像素有高度的相似性,这使得这些方法难以取得令人满意的去噪结果。借鉴BM3D算法的思想,本文提出一种结合相似块匹配和LMMSE滤波器的PolSAR影像去噪方法,其基本思路就是借助相似块匹配的方式在非局部范围内搜寻相似图块,以提升LMMSE滤波器的整体估计精度。模拟的PolSAR影像和两景不同成像模式下的高分3号卫星PolSAR影像的去噪实验都表明,本文提出的算法既能有效的抑制相干斑噪声,又能稳定保留影像的边缘、强散射点及散射特性等细节信息。
需要指出的是,由于本文提出的算法采用了两次非局部图块匹配及图块滤波的过程,导致运行效率偏低,在一定程度上会限制算法的实用性。因此,如何更快速地搜寻和匹配相似图块以及更快速地实现滤波是未来值得研究的方向之一。
参考文献(References)
-
Alonso-González A, Lopez-Martínez C L and Salembier P. 2012. Filtering and segmentation of polarimetric SAR data based on binary partition trees. IEEE Transactions on Geoscience and Remote Sensing, 50 (2): 593–605. [DOI: 10.1109/TGRS.2011.2160647]
-
Buades A, Coll B and Morel J M. 2005. A non-local algorithm for image denoising//IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA: IEEE, 2: 60–65 [DOI: 10.1109/CVPR.2005.38]
-
Chen J, Chen Y L, An W T, Cui Y and Yang J. 2011. Nonlocal filtering for polarimetric SAR data: a pretest approach. IEEE Transactions on Geoscience and Remote Sensing, 49 (5): 1744–1754. [DOI: 10.1109/TGRS.2010.2087763]
-
Chen J H, Zhao Y J, Huang J, Liu W and Lai T. 2014. Improved non-local means filter algorithm of multilook polarimetric SAR image. Journal of Geomatics Science and Technology, 31 (5): 496–504. ( 陈建宏, 赵拥军, 黄洁, 刘伟, 赖涛. 2014. 改进的多视PolSAR非局部均值滤波算法. 测绘科学技术学报, 31 (5): 496–504. )
-
Cloude S R and Pottier E. 1996. A review of target decomposition theorems in radar polarimetry. IEEE Transactions on Geoscience and Remote Sensing, 34 (2): 498–518. [DOI: 10.1109/36.485127]
-
Conradsen K, Nielsen A A, Schou J and Skriver H. 2003. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Transactions on Geoscience and Remote Sensing, 41 (1): 4–19. [DOI: 10.1109/TGRS.2002.808066]
-
Dabov K, Foi A, Katkovnik V and Egiazarian K. 2007. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Transactions on Image Processing, 16 (8): 2080–2095. [DOI: 10.1109/TIP.2007.901238]
-
D’Hondt O, Guillaso S and Hellwich O. 2013. Iterative bilateral filtering of polarimetric SAR data. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6 (3): 1628–1639. [DOI: 10.1109/JSTARS.2013.2256881]
-
Feng H X, Hou B and Gong M G. 2011. SAR image despeckling based on local homogeneous-region segmentation by using pixel-relativity measurement. IEEE Transactions on Geoscience and Remote Sensing, 49 (7): 2724–2737. [DOI: 10.1109/TGRS.2011.2107915]
-
Foucher S, Boucher J M and Bénie G B. 2000. Maximum likelihood estimation of the number of looks in SAR images//13th International Conference on Microwaves, Radar and Wireless Communications. Wroclaw: IEEE, 2: 657–660 [DOI: 10.1109/MIKON.2000.914020]
-
Freeman A and Durden S L. 1998. A three-component scattering model for polarimetric SAR data. IEEE Transactions on Geoscience and Remote Sensing, 36 (3): 963–973. [DOI: 10.1109/36.673687]
-
Goodman N R. 1963. Statistical analysis based on a certain multivariate complex Gaussian distribution (an introduction). The Annals of Mathematical Statistics, 34 (1): 152–177. [DOI: 10.1214/aoms/1177704250]
-
Lee J S. 1980. Digital image enhancement and noise filtering by use of local statistics. IEEE Transactions on Pattern Analysis and Machine Intelligence, PAMI, 2 (2): 165–168. [DOI: 10.1109/TPAMI.1980.4766994]
-
Lee J S, Grunes M R and de Grandi G. 1999. Polarimetric SAR speckle filtering and its implication for classification. IEEE Transactions on Geoscience and Remote Sensing, 37 (5): 2363–2373. [DOI: 10.1109/36.789635]
-
Lee J S, Grunes M R, Schuler D L, Pottier E and Ferro-Famil L. 2006. Scattering-model-based speckle filtering of polarimetric SAR data. IEEE Transactions on Geoscience and Remote Sensing, 44 (1): 176–187. [DOI: 10.1109/TGRS.2005.859338]
-
Lee J S and Pottier E. 2009. Polarimetric Radar Imaging: from basics to Applications. Boca Raton, FL: CRC Press
-
Lopez-Martínez C and Fabregas X. 2003. Polarimetric SAR speckle noise model. IEEE Transactions on Geoscience and Remote Sensing, 41 (10): 2232–2242. [DOI: 10.1109/TGRS.2003.815240]
-
Ma X S, Shen H F, Zhang L P, Yang J and Zhang H Y. 2015. Adaptive anisotropic diffusion method for polarimetric SAR speckle filtering. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 8 (3): 1041–1050. [DOI: 10.1109/JSTARS.2014.2328332]
-
Nie X L, Qiao H and Zhang B. 2015. A variational model for PolSAR data speckle reduction based on the wishart distribution. IEEE Transactions on Image Processing, 24 (4): 1209–1222. [DOI: 10.1109/TIP.2015.2396292]
-
Novak L M, Burl M C and Irving W W. 1993. Optimal polarimetric processing for enhanced target detection. IEEE Transactions on Aerospace and Electronic Systems, 29 (1): 234–244. [DOI: 10.1109/7.249129]
-
Parrilli S, Poderico M, Angelino C V and Verdoliva L. 2012. A nonlocal SAR image denoising algorithm based on LLMMSE wavelet shrinkage. IEEE Transactions on Geoscience and Remote Sensing, 50 (2): 606–616. [DOI: 10.1109/TGRS.2011.2161586]
-
Schou J and Skriver H. 2001. Restoration of polarimetric SAR images using simulated annealing. IEEE Transactions on Geoscience and Remote Sensing, 39 (9): 2005–2016. [DOI: 10.1109/36.951091]
-
Touzi R. 2002. A review of speckle filtering in the context of estimation theory. IEEE Transactions on Geoscience and Remote Sensing, 40 (11): 2392–2404. [DOI: 10.1109/TGRS.2002.803727]
-
Van Zyl J J, Zebker H A and Elachi C. 1987. Imaging radar polarization signatures: theory and observation. Radio Science, 22 (4): 529–543. [DOI: 10.1029/RS022i004p00529]
-
Vasile G, Trouve E, Lee J S and Buzuloiu V. 2006. Intensity-driven adaptive-neighborhood technique for polarimetric and interferometric SAR parameters estimation. IEEE Transactions on Geoscience and Remote Sensing, 44 (6): 1609–1621. [DOI: 10.1109/TGRS.2005.864142]
-
Yang G H. 2012. Study of polarimetric SAR despeckling based on nonlocal means. Xi’an: Xidian University (杨国辉. 2012. 基于非局部均值的极化SAR降斑研究. 西安: 西安电子科技大学)


