
|
收稿日期: 2017-07-24
基金项目: 国家基础测绘科技计划(编号:2016KJ0103);国家重点研发计划(编号:2017YFB0503004)
第一作者简介: 胡娇静(1993— ),女,硕士研究生,研究方向为遥感图像目标识别、微波遥感等。E-mail:rshujj@163.com
通讯作者简介: 张继贤(1965— ),男,研究员,研究方向为摄影测量与遥感、地理信息系统、资源与环境遥感监测。E-mail:zhangjx@casm.ac.cn
中图分类号: TP701
文献标识码: A
|
摘要
为提高SAR影像岸线自动分割的精度和效率,针对传统二进制(影像序列生成的金字塔步长底数为a=2)多尺度C-V模型对初始条件敏感、收敛速度低的问题,提出指数型(影像序列生成的底数为a≥1)多尺度影像序列生成方法,本方法将传统多尺度影像序列的生成方式的底数2量化为a≥1的任意数,并应用筛选因素进行自动地快速识别海岸线。从海岸线分割结果和所需时间方面与已有传统二进制C-V模型算法进行对比,实验表明本文算法在保证精度的条件下单次迭代逼近海岸线的计算量上小于传统即二进制多尺度C-V模型的单次迭代计算量,总迭代次数有所减少,时间效率有所提高,提高了岸线自动分割的精度和效率。
关键词
SAR, 指数型影像序列, 海岸线分割, 多尺度, C-V模型
Abstract
The coastline, which defines the boundary between the sea and land, is the benchmark for the division of national territory and the exclusive economic zones of oceans, and it is crucial to the maintenance of the rights to oceans. Extracting coastline information rapidly and accurately has become a popular issue in ocean research. However, detecting the coastline from SAR images is challenging because the information from land and sea can be mixed in a complex landform, and the reflection information from the sea area is changeable. The C-V model possesses strong detection sensitivity and anti-noise capability for coastline detection. However, the method involves complex iterations and large amounts of calculation. The speed of coastline detection is low for large-sized SAR images. Reducing the number of iterations and improving testing efficiency are the focus of this study, and the accuracy of the results are guaranteed under this premise. Given that the existing binary C-V model for coastline segmentation has low convergence speed and is highly sensitive to initial conditions, a novel approach using the exponential sequence of SAR images is proposed to improve the accuracy and efficiency of automatic coastline segmentation of SAR images. In this study, the image sequence generated by the traditional method is changed to an exponential sequence based on any bottom number greater than 1. The coastline is automatically detected based on predefined features from the generated image sequence. The main research techniques adopted are as follows. (1) The exponential multi-scale technology of the traditional C-V model that reduces image size and obtains a series of images under different spatial resolutions is introduced. (2) A low-pass filter is used to polish a small-scale image sequence, which is easy to form and has a relatively smooth boundary. (3) The exponential image sequence with different scales and polished degrees splits the coastline based on the C-V model of the level set one by one. In the division of the coastline, the high-spatial-resolution image inherits the boundary extracted by using low-spatial-resolution images in the high level and refines the coastline further through the C-V model. Coastline detection accuracy is ensured, and experimental results show that the computation effort of each iteration in the presented approach is less than that in the segmentation procedure based on the binary C-V model. The amount of iteration frequency is also reduced. The multi-scale method achieves image conversion from a low scale to a high scale. The low-pass filter removes small and pointless feature information, which improves the level set of the C-V model to achieve a simple iteration, significantly reduces time, and refines the boundary. The entire process ensures efficiency, high precision of edge extraction, and fast running time. Compared with the traditional binary C-V model, the presented approach is more efficient and effective in terms of computation effort and detection accuracy. Experimental results show that the presented method accelerates the acquisition of initial level set information and shortens the time of coastline extraction. The method also removes the non-coastline body and improves the detection precision of the main coastline body, thus ensuring a robust coastline detection process.
Key words
SAR, exponential image sequence, coastline segmentation, multi-scale, C-V model
1 引 言
定义陆地与海洋的交界线称为海岸线,受自然和人为因素的影响,海岸线在不停地升降改变,实际上是一个“带”,称之为海岸带。中国海岸带地区是中国最重要的经济带、城市带,对经济社会发展具有重要作用。全国海岸带开发利用监测作为地理国情监测项目的一部分,对近海开发利用发挥着重要的作用(于彩霞 等,2014)。作为海岸带的基础要素之一,海岸线不仅是海陆的分界线,也是海岸变化的重要空间位置指标、景观变化指标和生态环境变化指标,是划分国家领土和海洋专属经济区的基准,对维护海洋权益有着重要的意义(Chen和Chang,2009)。随着沿海经济的快速发展,海岸线正发生着高频度、显著地变化,传统的海岸线调查在资料获取、信息处理等方面存在着较大局限性,主要表现在海岸环境的可进入性与通达性较差,近海和海岸环境复杂多变,难以进行多变量同步控制,观测海岸环境变化周期长、信息量大,难以取得理想的可控制数据,在实时处理上也有很大困难(Chen和Chang,2009)。
合成孔径雷达SAR(Synthetic Aperture Radar)以其高频、高精度、快速、统一、同步、综合的数据获取能力以及全天候、大面积、同步和周期性观测的特点很好地克服了上述局限,非常适用于海岸线信息探测(Boak和Turner,2005),作为陆地表面与海洋表面的交界线,海岸线可分为大陆海岸线和岛屿海岸线。国内外基于SAR影像海岸线分割方法的研究主要有区域生长(谢明鸿 等,2007)、阈值分割(陈祥 等,2014)、小波变换(顾丹丹 等,2013)、马尔可夫随机场(Baselice 等,2012)、人工神经网络(欧阳越和种劲松,2004)、水平集(林政宗 等,2014)等。其中,水平集方法(Zhang 等,2010)具有较强的检测灵敏度和抗噪能力的优点(Osher和Fedkiw,2002)。Chan和Vese(2001)提出了简化的水平集方法,称其为C-V模型。Gao和Bui(2005)提出了多相位梯度C-V模型,分割过程除依靠模型参数的选择和初始曲线的给定外加入梯度参数。Lie等人(2006)提出了二值化的C-V模型,将符号距离函数用不连续的二值函数代替。Gao等人(2008)利用n个水平集构造n个区域,提出了M-C-V模型,提高了效率,但分割结果受初始曲线影像较大,导致误分割,精度较差。徐川等人(2014)利用最大类间方差分割SAR图像作为水平集演化的初始轮廓,将水平集理论和多尺度分析相结合检测海岸线。吴诗婳等人(2015)利用图像边缘强度取代Dirac函数,将粗分割结果作为改进C-V模型的初始条件,对河流图像进行细分割。
现有对C-V模型的研究仅局限于影像序列生成过程中的金字塔步长底数为a=2(刘鹏程,2015;王大凯 等,2008;Brox和Weickert,2004),在具体应用于海岸线分割中,一是由于SAR影像固有的斑点噪声,包含不同尺寸大小的复杂地物目标及不同层次的空间结构,导致C-V模型差分迭代需要较小的迭代步长和较多的迭代次数,边界检测速度变慢(Courant 等,1967);二是从SAR图像检测海岸线具有一定的挑战性,因为它既包含了陆地区域信息也包含海水区域信息,并且陆地地貌复杂,来自海岸线的反射信息变化无常,有时很难和陆地地物信息区分,导致分割结果不理想(Sonka 等,2008),无法实现岸线快速自动化的分割。在二进制多尺度C-V模型上如何改进多尺度影像序列的生成方式,并加入筛选因素进行自动地快速识别海岸线,成为本文研究的核心内容。
针对现有的二进制多尺度C-V模型迭代复杂时间缓慢且未考虑自动识别岸线的问题,本文提出了基于指数型多尺度影像序列生成方式的C-V模型快速自动分割岸线算法。
2 整体技术流程
基于指数型多尺度影像序列生成方式的C-V模型快速自动分割岸线算法包括纵向上的影像序列生成和横向上的影像自动分割处理两个方向,步骤如图1。
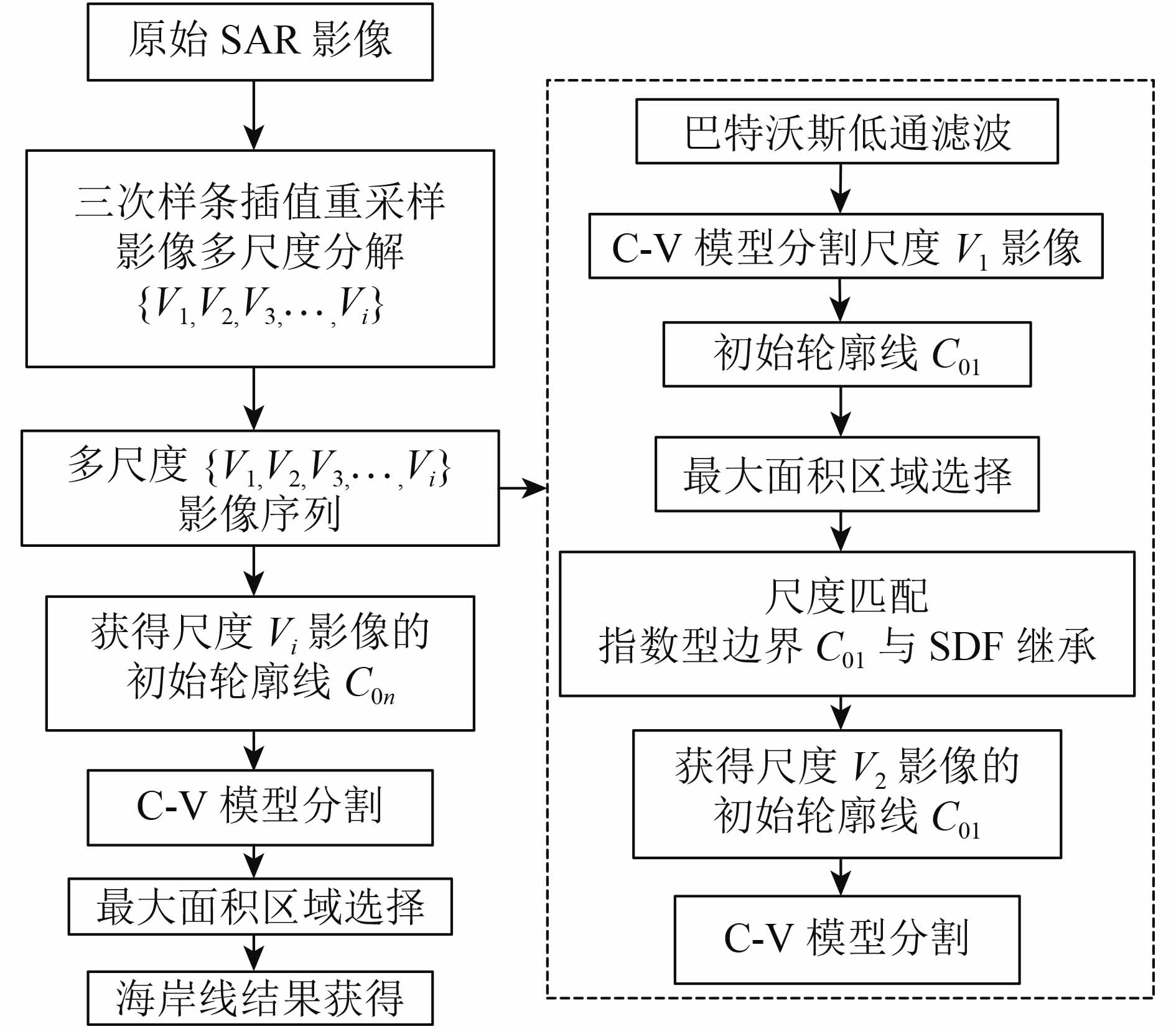

(1) 对原始SAR影像进行纵向上的3次样条Bessel差值函数处理,重采样生成分辨率由低到高的多尺度影像序列{V1,V2,V3,
(2) 对生成的最小尺度影像V1进行横向上的影像分割处理,得到C-V模型的初始轮廓线C01,并纵向通过坐标伸缩(x×Si+1/Si, y×Si+1/Si)(x, y为网格步长,Si为影像序列金字塔步长)把符号距离函数SDF(Signal Distance Function)函数ψ0、处理后的C01岸线以指数型影像序列的生成方式继承到下一个尺度,即计算迭代到下一级尺度影像V2中,作为尺度影像V2的C-V模型的初始水平集,再将尺度影像V2进行横向上的影像分割处理,获得C-V模型的初始轮廓线C02;
(3)依次迭代继承,直至在尺度影像Vi中获得最终的初始轮廓线C0n,作为原始SAR影像的初始水平集,最后进行横向上的影像分割处理,最大面积选择排序获得SAR影像海岸线的分割结果。
3 算法基本原理
本文算法的纵方向为影像从小尺度向大尺度的序列生成过程,横方向为单次影像序列的自动分割过程,两个方向具体原理描述如下。
3.1 纵向影像序列生成
3.1.1 影像重采样
影像任意尺度重采样(Ogawa,1986)采用分片3次Bessel插值法(Dragotti 等,2005):
| ${s_i}(x) = \frac{1}{{12}}(\begin{array}{*{20}{c}}{{t^3}} & {{t^2}} & t & 1\end{array})\left( {\begin{array}{*{20}{c}}1 & { - 7} & {16} & { - 16} & 7 & { - 1}\\[4pt]{ - 2} & {15} & { - 28} & {20} & { - 6} & 1\\[4pt]1 & { - 8} & 0 & 8 & { - 1} & 0\\[4pt]0 & 0 & {12} & 0 & 0 & 0\end{array}} \right)\left( {\begin{array}{*{20}{c}}\displaystyle{{{\textit{z}}_{i - 2}}}\\[4pt]{{{\textit{z}}_{i - 1}}}\\[4pt]{{{\textit{z}}_i}}\\[3pt]{{{\textit{z}}_{i + 1}}}\\[4pt]{{{\textit{z}}_{i + 2}}}\\[4pt]{{{\textit{z}}_{i + 3}}}\end{array}} \right)$ | (1) |
式中,x, y为网格步长,Si为影像序列金字塔步长,t=x–i,i≤x≤i+1,z为像素节点。设重采样影像金字塔步长为Si(0<Si≤1),新影像的像素点位置(u, v)与原影像的像素点位置(i, j)的对应关系为
| $\begin{array}{l}i{\rm{ }} = {\rm{floor}}(u/{S_i}){\rm{ , }}1 \leqslant u \leqslant {\rm{floor}}(m \times {S_i})\\[5pt]j = {\rm{floor}}(v/{S_i}){\rm{ , }}1 \leqslant v{\rm{ }} \leqslant {\rm{floor}}(n{\rm{ }} \times {S_i})\end{array}$ | (2) |
式中,floor(x)是向下取整函数。
3.1.2 指数型金字塔影像序列的生成
影像处理中生成金字塔影像序列的目的是一方面在传统算法的基础上有效减少计算量,另一方面通过尺度变化降低噪声干扰并整合所关注的对象,从而减少迭代时间(冯文卿和张永军,2015)。图2给出了指数型金字塔影像序列的生成方式中,底数变化对影像序列长度的影响。
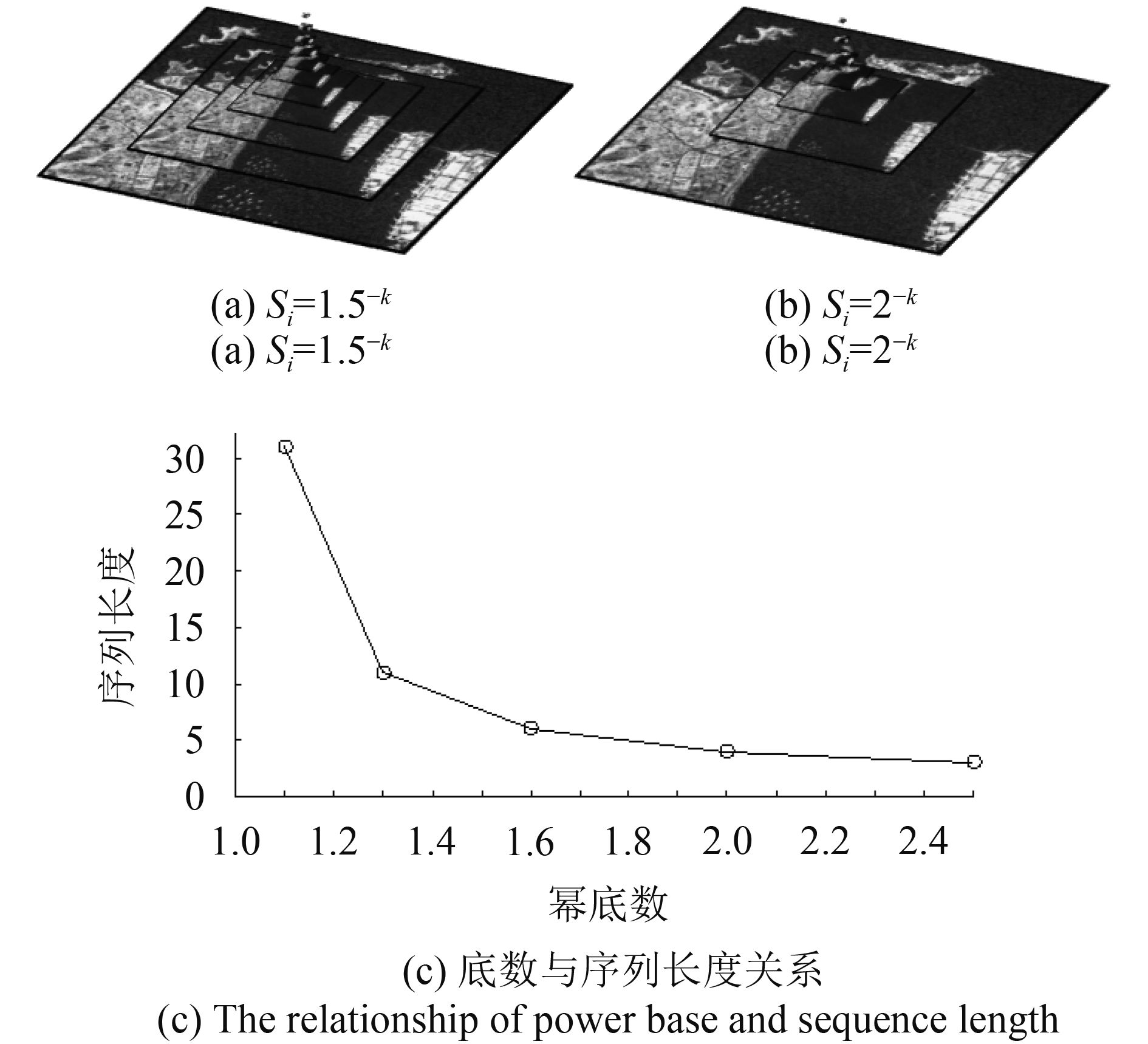
指数型影像序列生成算法记Si为影像序列的金字塔迭代步长,m、n为影像的长、宽,C-V模型计算采用半隐式迎风差分格式,设一次迭代乘除个数为T0,金字塔最小影像的边长记为Lmin,指数型金字塔步长为Si=a–(N–i+1)(i=1,
| ${T_{{\rm{SUM}}}} = \sum\limits_{i = 1}^N {{T_0}{a^{ - 2(N - i + 1)}}} = {T_0}\frac{{1 - {a^{ - 2N}}}}{{{a^2} - 1}} < \frac{{{T_0}}}{{{a^2} - 1}}$ | (3) |
对二尺度影像序列a=2,TSUM≈0.33T0。如图2所示,指数型金字塔影像序列的生成随底数变大其序列长度明显变短。
3.2 横向影像分割处理
3.2.1 传统C-V模型
用水平集函数表达的轮廓线C的长度和轮廓线内部的面积分别为
| $\begin{array}{l}L(C) = \int_{{\varOmega}} {|\nabla H|} {\rm{d}}x{\rm{d}}y = \int_{{\varOmega}} {\delta (\psi )|\nabla \psi |} {\rm{d}}x{\rm{d}}y\\[5pt]S[{\rm{inside}}(C)] = \int_{{\varOmega}} {H(\psi )} {\rm{d}}x{\rm{d}}y\end{array}$ | (4) |
式中,Ω是水平集函数的定义域,δ(x)是Dirac函数,H(z)是Heaviside函数,SDF函数初始值ψ0为{C0|ψ0(x, y)=0},C0是初始轮廓线,Ψ是满足ψ[inside(C)]>0和ψ[outside(C)]<0的SDF。inside(C)表示在轮廓线C内的集合点,outside(C)表示在轮廓线C外的集合点。影像分割能量函数为
| $\begin{aligned}F(\psi ,{C_ + },{C_ - }) = & \mu L(C) + vS(C) + {{\textit{λ}} _0}\int {_{{\rm{inside}}(C)}|I - {C_ + }{|^2}{\rm{d}}x{\rm{d}}y} +\\ & {{\textit{λ}} _1}\int {_{{\rm{outside}}(C)}|I - {C_ - }{|^2}{\rm{d}}x{\rm{d}}y} \end{aligned}$ | (5) |
式中,L(C)和S(C)控制C的平滑度,μ, ν≥0为曲率,λ0, λ1>0是权重系数。C-V模型的半隐式差分格式计算中的空间网格步长(x, y)需要满足Friedrichs Lewy稳定性条件。在影像空间中若x=y=1,则要求时间步长满足Δt≤1/(|μ|+|ν|+|λ0+λ1|)。
3.2.2 应用筛选因素自动分割处理
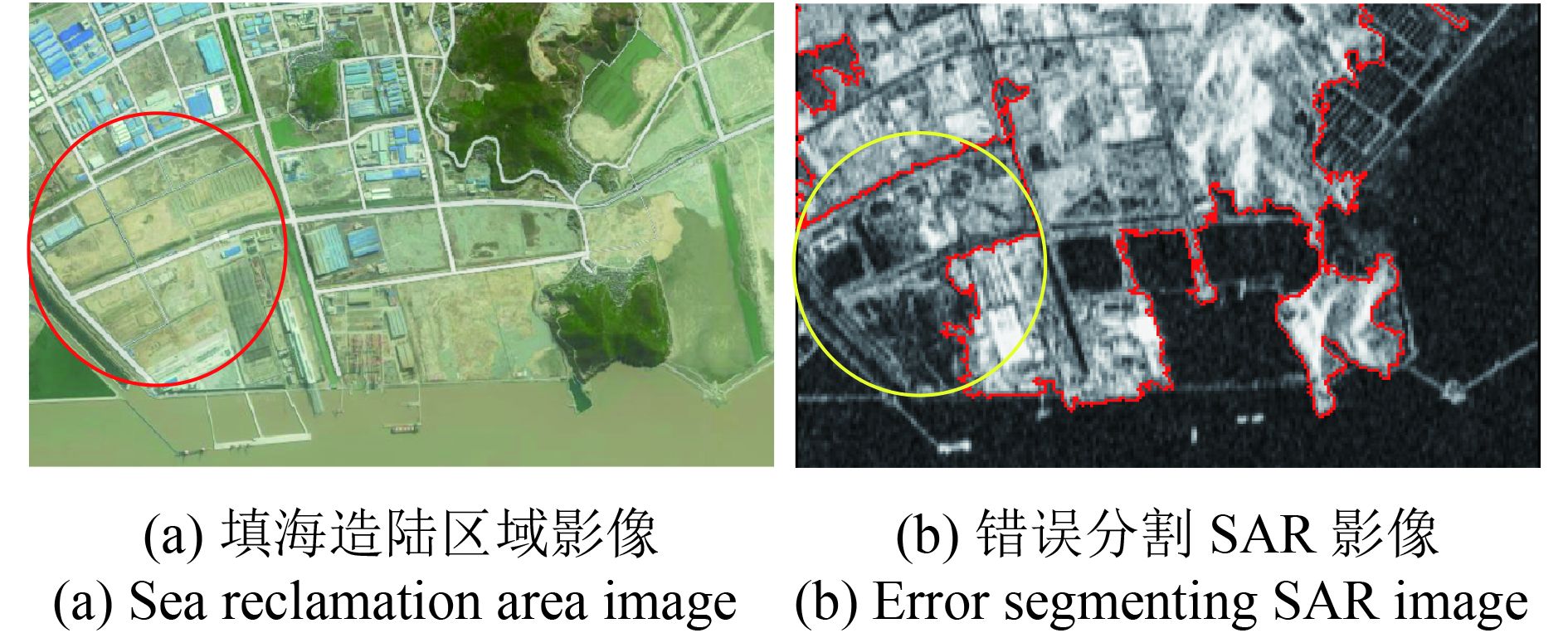
如图3所示,传统C-V模型算法中多尺度影像序列的小尺度采样(寇光杰 等,2011)提高了海陆地物差异,然而,由于海岸线周围环境的复杂性导致SAR影像存在地物的误分割(邓少平 等,2011)。
本文算法在C-V模型的基础上加入筛选因素,首先利用巴特沃斯低通滤波器在一定程度上进一步消除复杂地物对岸线分割的影响。
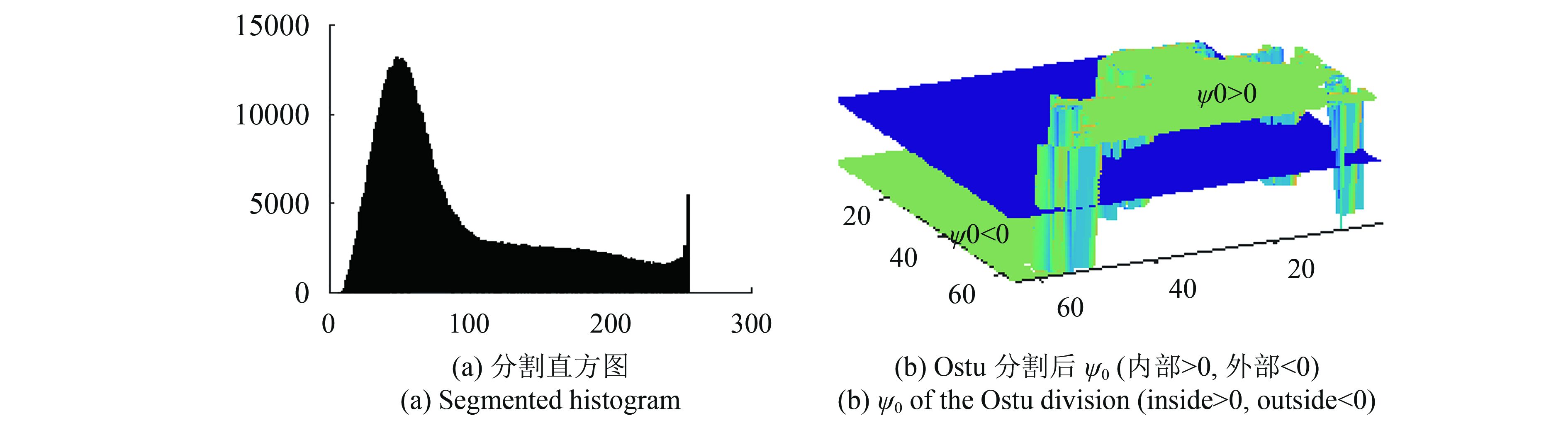
然后,经此预处理的影像根据C-V模型要求需要给出初始的ψ0值。如图4(a)直方图所示,根据SAR反射强度在水与陆地上有显著差异(陶珂和朱建军,2012)的特点利用分割给出初始的地面区域(Mason和Davenport,1996)。针对海(礁)岸线分割,文献根据GAMMA分布给出了类似分割的C-V模型的初始分割阈值。如图4(b)所示,对ψ0,用正值填充初始地面区域而海域部分用负值填充,即ψ0[inside(C)]>0,ψ0[outside(C)]<0。
最后,在C-V模型区域分割中,识别出区域与区域之间存在大区域包含小区域或者没有公共区域的两种状态(若出现边界接触,可归并为一个区域)。利用面积大小有效地排除礁石类等小区域,规避不必要的地物因素。多边形区域面积计算式如下
| ${A_\Omega } = \frac{1}{2}\sum\limits_{k = {\rm{1}}}^N {({x_k}{y_{1 + {\rm{mod}}(k, N)}} - {y_k}{x_{1 + {\rm{mod}}(k, N)}})} $ | (6) |
式中,(x1, y1), (x2, y2),
4 实验与分析
实验采用2009年6月8日舟山群岛的Cosmo-SkyMed数据,极化方式为HV,分辨率为15 m,影像大小为1024×1024。实验规定影像序列的最小影像边长≥MinL,即影像序列长度N=floor (loga(1024/(a+1)))。
实验中随机选取采用影像序列的底数a=1.1, 1.5和2。根据相邻影像比例a–2,当a=2时,占影像序列90%的前18个小尺度影像的尺度缓慢增长。则影像序列个数长度N=floor(log2(1024/3))=8。指数型影像序列若当底数a=1.1时,影像序列长度N=64。若当底数a=1.5,影像序列长度N=14;若当底数a=2.5时,影像序列长度N=6;若当底数a=3时,影像序列长度N=5。
表1列出了实验中采用的所有实验参数。实验计算为保证一致性均采用了表1参数。本文对传统的二进制尺度影像序列金字塔步长底数a=2与指数型影像序列进行相同参数下的对比实验。
表 1 C-V模型参数
Table 1 The parameter of C-V model
| 最小边长 | 多尺度迭代 | 精细迭代 | 步长 | μ | ν | λ0 | λ1 |
| ≥51 | 1 | 1 | 0.01 | 1.5Σ | 0 | 100 | 100 |
| 注:Σ=当前影像的长×宽。 | |||||||
4.1 指数型算法轮廓线演进3维视图
图5给出了轮廓线函数ψ 3维视图。图5(a)为初始的ψ视图,图5(b)—(f)是海岸线在高精度提取的条件下,不同底数的指数型算法ψ 3维视图。
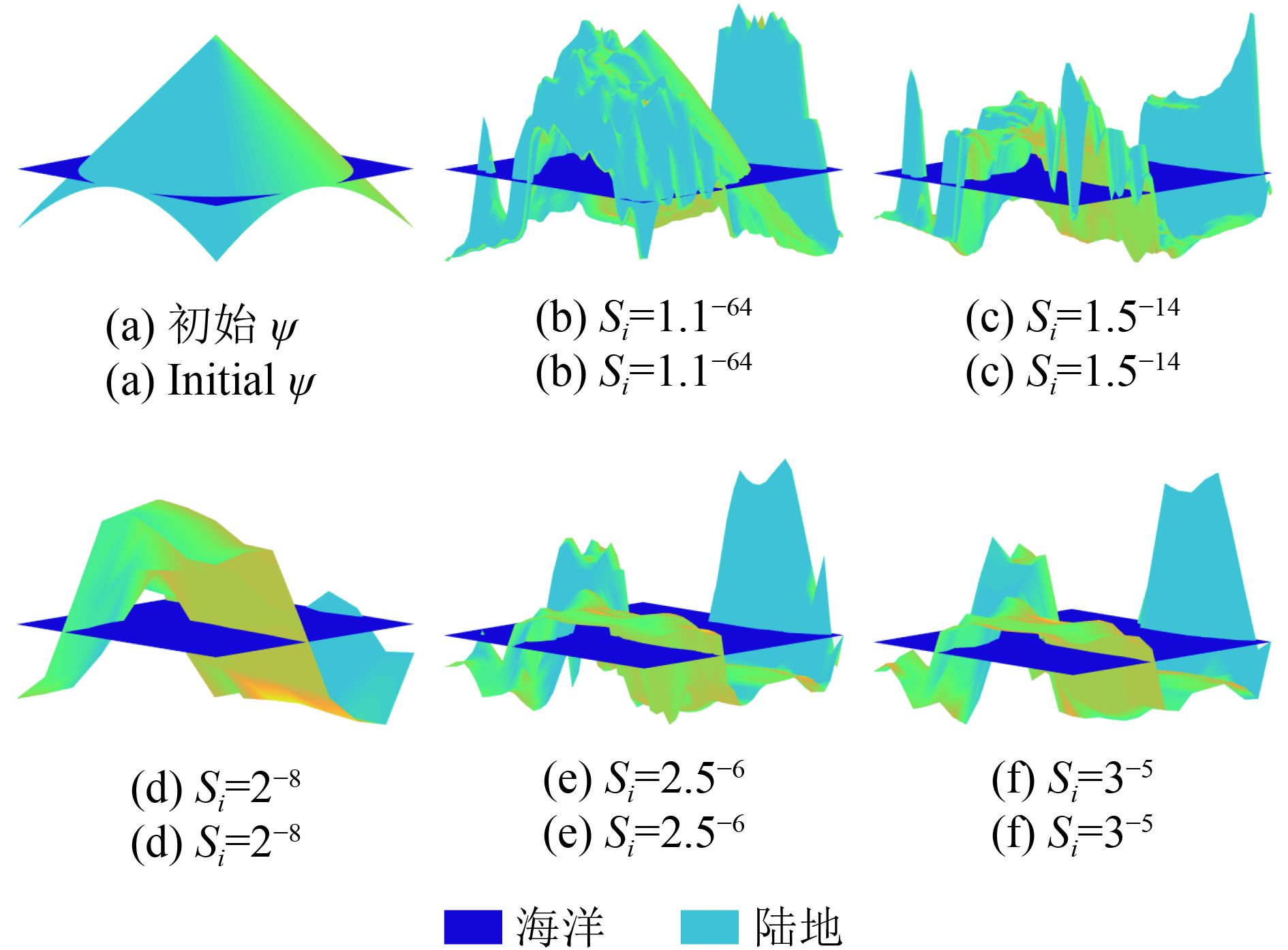
一方面,在多尺度影像序列中,两个相邻影像之间存在的较大尺度差异下(Dellepiane 等,2004),活动边界曲线的一次迭代计算步长距离相对变小,动曲线与真实边界之间的距离相对拉大,当指数的底数维持不变时,一次迭代的逼近距离不足以大幅度逼近边界,其逼近前后的边界结果变化不大(Heygster 等,2010);另一方面,在单次迭代下,边界逼近速度跟不上金字塔步长的变化,指数型由于金字塔步长指数的底数增加,单次迭代过程复杂度随多尺度影像序列的影像幅度成倍速增长。因此,在不同的影像序列金字塔步长底数下,指数型算法利用影像序列尺度变化的渐进性,影像序列之间的边界演化具有不同的精细逼近。
4.2 传统算法与指数型算法在处理精细程度上的分割海岸线对比实验
选取图8(b)作为本实验所用影像,不同底数的指数型多尺度C-V模型与传统二进制(a=2)对局部影像典型海岸区域的分割结果如黄色圈定区域所示。
图6(a)、(b)、(d)黄色圈定区域的对比表明,指数型计算依赖于影像序列金字塔步长底数,随着指数型影像序列金字塔步长底数的加大,影像序列中的过渡步长导致分割线逼近海岸线程度不同,对不同地物不同图幅大小的SAR影像可根据使用需求设立多尺度序列金字塔步长底数,算法具有鲁棒性和实用性。
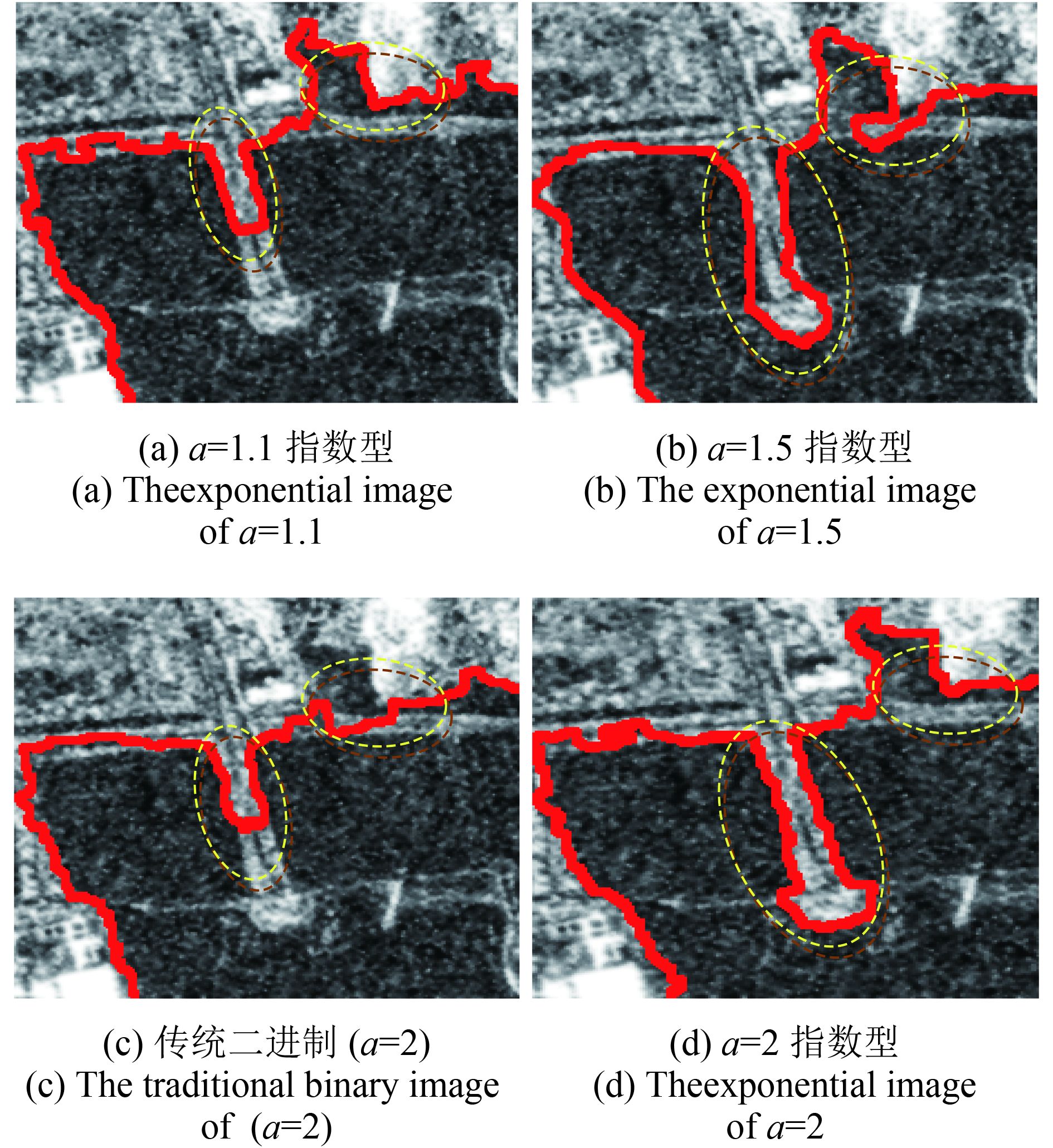
图6(c)、6(d)黄色圈定区域的对比表明,传统二进制算法在水陆边界逼近程度上存在逼近不到位的问题。分析指数型尺度增长特点,指数型方法在大尺度图像之间的过渡比传统二进制多尺度算法连续,说明指数型多尺度方法对相对复杂边界的适应性较强。
如表2所示,在计算速度上,指数型计算依赖于金字塔步长的底数。当底数a=1.1时,指数型计算耗时相对较大。但当a≥1.5时指数型计算时间迅速减少。因此,计算时间与影像序列的长短及每个影像的大小有关。时间随底数的变化虽取决于实际影像条件,但较传统算法来说时间总体上缩短。
表 2 指数型算法金字塔步长底数a及其计算用时
Table 2 The comparison of time and image sequences by exponential image sequence generation method
| a | N | 时间/s |
| 1.1 | 64 | 12.77 |
| 1.5 | 14 | 3.17 |
| 2(传统) | 8 | 315 |
| 2 | 8 | 2.68 |
4.3 传统算法与指数型算法分割海岸线对比实验
选取6幅舟山群岛不同典型地物的SAR影像进行试验(图7),不同影像包含复杂不同地物类型的岛(礁)岸线:通过条带连接的岛屿岸线;大型养渔场及岛(礁)岸线;岛(礁)及人工建筑岸线;斑点噪声及复杂边界岸线。
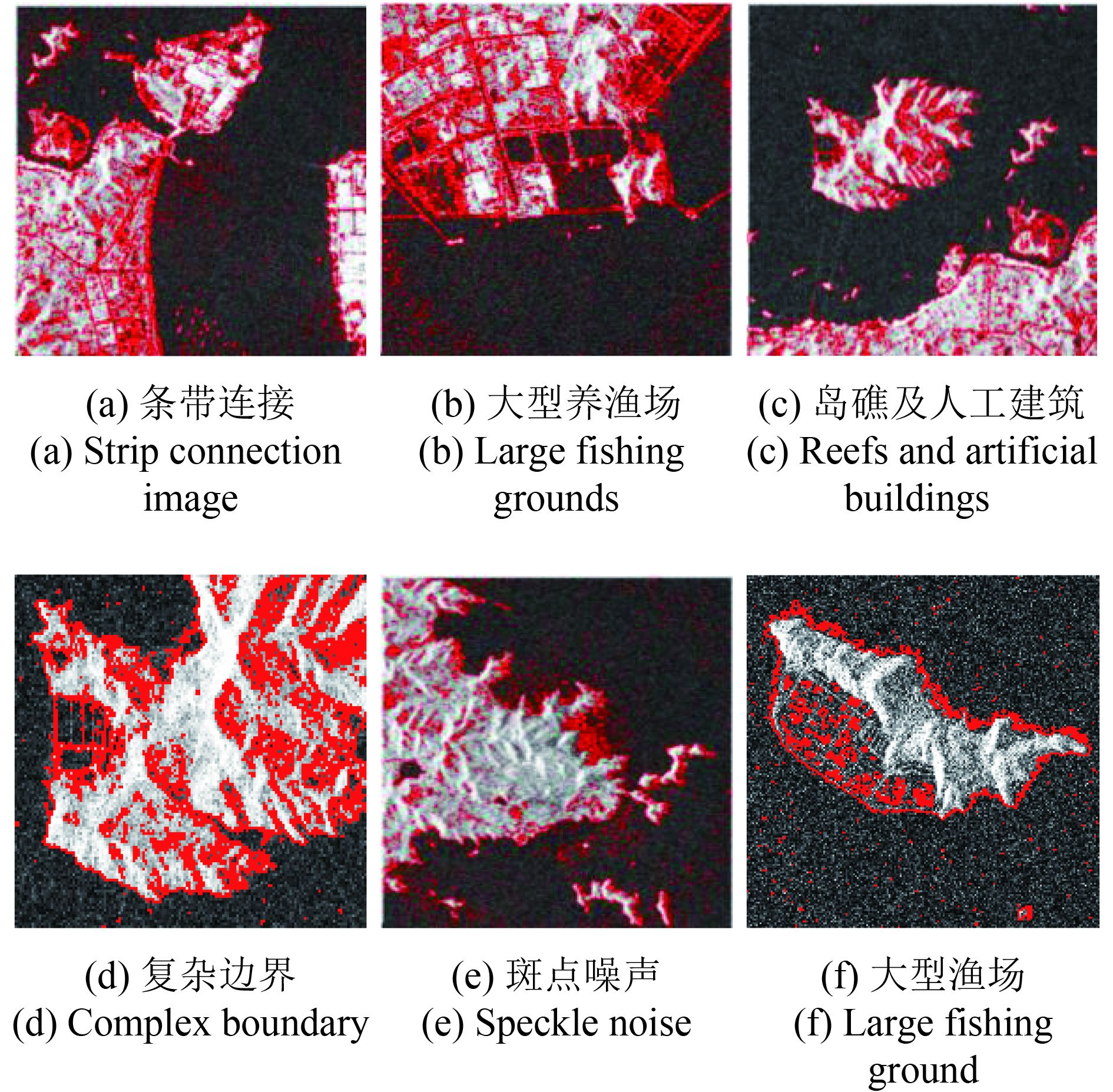
由图7(a)—(d),影像的岸线边界较复杂,岸线周边具有斑点噪声、渔场、岛礁、小礁石、船舶、海上漂浮物等因素。一方面,传统二进制(a=2)C-V模型精细地对海岸线周围的全部地物进行了分割,目标海岸线识别困难,分割结果包含其他非海岸线因素;另一方面,由于各种地物分割过程复杂因此迭代过程随之复杂,无法对海岸线进行快速有效的自动识别。
由图8(a)—(d),基于指数型影像序列生成方式的多尺度C-V模型算法,首先依据相应影像确定相应影像序列金字塔步长的底数,然后对影像低通滤波、重采样降低空间分辨率,具有高频特性与岸线无关的干扰得到抑制或消除,加之C-V模型中通过加大参数λ0, λ1的权重(Hai 等,2012),陆地均方差λ0|C+–I|2与渔场或礁石差异得到加强,海洋均方差λ1|C––I|2与岛屿或大型渔场之间的差异得到加强,为控制C-V模型轮廓线走向计算提供了约束。以上多尺度、滤波和海陆差异强化等的综合方案较好的避免了海岸线周边因素对海岸线提取的干扰,得到了优于传统算法的高精度海岸线分割结果,随之海岸线逼近计算的迭代次数得到较大幅度的减少。

为精确评价传统算法与指数型算法对6幅影像海岸线的分割结果误差,本文引用一种针对海岸线提取的精度评价指标—偏移误差(胡娇静 等,2017):首先对两种算法的岸线进行一维的坐标数据插值重采样,获取岸线坐标的相同点数据n。然后,利用一组经验数据集(手动勾绘)作为参考标准岸线数据,与两种算法的岸线数据进行曲线拟合。将参考标准岸线数据与两种算法的分割结果进行循环对比,寻找最近相似点(即获得“同名点”)最后,利用整体最小二乘,计算“同名点”位移偏移量距离的均值,即偏移量的均方根误差,公式如下
| ${\rm{RMSE}} = \sqrt {\frac{{\sum\limits_{i = 1}^n {{{\left( {{X_{{\rm{bos}},i}} - {X_{{\rm{model}},i}}} \right)}^2}} }}{n}} $ | (7) |
式中,Xbos,i为找到最近相似点的目标岸线坐标数据,Xmodel,i为参考标准岸线坐标数据,n为两数据的差值重采样坐标点数。
如表3所示,传统二进制多尺度C-V模型算法对6幅影像分割的岸线与参考标准岸线的偏移误差均值为0.54,基于指数型多尺度影像序列生成方式的C-V模型快速自动分割岸线算法对6幅影像分割的岸线与参考标准岸线的偏移误差均值为0.19,说明改进算法有效避免了传统算法存在的误分割,提高了海岸线的分割精度。
表 3 两种算法提取海岸线结果定量评价
Table 3 Quantitative evaluation of coastline extraction
| 影像偏移误差值 | 参考标准岸线 | 传统算法 | 指数型算法 |
| RMSEa | 0 | 0.76 | 0.28 |
| RMSEb | 0 | 0.74 | 0.26 |
| RMSEc | 0 | 0.59 | 0.23 |
| RMSEd | 0 | 0.42 | 0.18 |
| RMSEe | 0 | 0.38 | 0.10 |
| RMSEf | 0 | 0.33 | 0.07 |
| 偏移误差均值 | 0 | 0.54 | 0.19 |
| 注:a、b、c、d、e、f分别表示6幅舟山群岛的影像。 | |||
上述两种算法对6幅影像海岸线分割的迭代次数和运行时间见表4和表5。
表 4 传统算法计算迭代次数及其用时
Table 4 The comparison of iteration numbers and times by original binary C-V model method
| 参数 | 影像(a) | 影像(b) | 影像(c) | 影像(d) | 影像(e) | 影像(f) |
| 迭代次数 | 30 | 28 | 29 | 25 | 22 | 21 |
| 用时/s | 539.56 | 444.56 | 500.18 | 466.01 | 442.23 | 330.27 |
表 5 指数型计算迭代次数及其用时
Table 5 The comparison of iteration numbers and times by exponential multi-scale C-V model method
| 参数 | 影像(a) | 影像(b) | 影像(c) | 影像(d) | 影像(e) | 影像(f) |
| 迭代次数 | 4 | 4 | 4 | 3 | 3 | 2 |
| 用时/s | 11.73 | 9.22 | 8.80 | 7.66 | 7.42 | 6.83 |
对比表4—表5的计算时间,对6幅不同地物类型的SAR影像,传统二进制算法迭代次数较多,耗时时间长,指数型算法迭代次数明显降低,在计算时间速率上有显著提高。
5 结 论
根据原理,C-V模型的目标泛函F(ψ, C+, C–)作为一个变分数值求解问题与非线性多峰值函数优化计算一样,其计算存在起始点问题。非线性多峰值函数优化计算中起始点决定能否获得正确结果和能否快速获得正确结果。本文依据电磁波在水中被吸收的程度显著大于陆地的特点,利用指数型多尺度算法,跟据不同原始SAR影像确定相应金字塔步长底数的影像序列,经横纵方向影像的处理优先确定了原始SAR影像的SDF的初始值C0n,较传统二进制多尺度C-V模型算法,在原理上有效地规避了海岸线分割过程中遇到的各种干扰因素。
实验分析表明,本文算法基于SAR在海陆上的反射差异用分割方法优先确定了SDF的初始值以便更好地使初始水平集精细贴近边界;经小尺度缩并、低通滤波弥合、面积排序的处理规避了岸线提取过程中陆地上存在的各种干扰目标岸线;通过相应金字塔步长的底数对应的多尺度影像序列之间的SDF和水平集的继承,提高了不同尺度之间的C-V模型连续过渡计算效率;单次迭代逼近海岸线的计算量上均小于传统二进制多尺度C-V模型的单次迭代计算量,总迭代次数也有所减少,提高了时间效率。综上所述,本文提出的算法提高了岸线自动分割的精度和效率。
参考文献(References)
-
Baselice F, Ferraioli G and Pascazio V. 2012. Coastal line extraction from SAR multi-channel images//Proceedings of 2012 Tyrrhenian Workshop on Advances in Radar and Remote Sensing. Naples: IEEE, 2012: 322–325 [DOI: 10.1109/TyWRRS.2012.6381149]
-
Boak E H and Turner I L. 2005. Shoreline definition and detection: a review. Journal of Coastal Research, 21 (4): 688–703. [DOI: 10.2112/03-0071.1]
-
Brox T and Weickert J. 2004. Level set based image segmentation with multiple regions//Proceedings of the 26th DAGM Symposium. Tübingen, Germany: Springer: 415–423 [DOI: 10.1007/978-3-540-28649-3_51]
-
Cao G, Mao Z H, Yang X and Xia D S. 2008. Optical aerial image partitioning using level sets based on modified Chan-Vese mode. Pattern Recognition Letters, 29 (4): 457–464. [DOI: 10.1016/j.patrec.2007.10.024]
-
Chan T F and Vese L A. 2001. Active contours without edges. IEEE Transactions on Image Processing, 10 (2): 266–277. [DOI: 10.1109/83.902291]
-
Chen W W and Chang H K. 2009. Estimation of shoreline position and change from satellite images considering tidal variation. Estuarine, Coastal and Shelf Science, 84 (1): 54–60. [DOI: 10.1016/j.ecss.2009.06.002]
-
Chen X, Sun J, Yin K Y and Yu J P. 2014. Sea-land segmentation algorithm of SAR image based on Otsu method and statistical characteristic of sea area. Journal of Data Acquisition and Processing, 29 (4): 603–608. [DOI: 10.3969/j.issn.1004-9037.2014.04.017] ( 陈祥, 孙俊, 尹奎英, 于俊朋. 2014. 基于Otsu与海域统计特性的SAR图像海陆分割算法. 数据采集与处理, 29 (4): 603–608. [DOI: 10.3969/j.issn.1004-9037.2014.04.017] )
-
Courant R, Friedrichs K and Lewy H. 1967. On the partial difference equations of mathematical physics. IBM Journal of Research and Development, 11 (2): 215–234. [DOI: 10.1147/rd.112.0215]
-
Dellepiane S, De Laurentiis R and Giordano F. 2004. Coastline extraction from SAR images and a method for the evaluation of the coastline precision. Pattern Recognition Letters, 25 (13): 1461–1470. [DOI: 10.1016/j.patrec.2004.05.022]
-
Deng S P, Zhang J X and Li P X. 2011. Review of edge detection from polarimetric SAR imagery. Computer Engineering and Applications, 47 (22): 1–5, 16. [DOI: 10.3778/j.issn.1002-8331.2011.22.001] ( 邓少平, 张继贤, 李平湘. 2011. 极化SAR影像边缘检测综述. 计算机工程与应用, 47 (22): 1–5, 16. [DOI: 10.3778/j.issn.1002-8331.2011.22.001] )
-
Dragotti P L, Vetterli M and Blu T. 2005. Exact sampling results for signals with finite rate of innovation using Strang-Fix conditions and local kernels//Proceedings of 2005 IEEE International Conference on Acoustics, Speech, and Signal Processing. Philadelphia, PA, USA: IEEE: 223–236 [DOI: 10.1109/ICASSP.2005.1415988]
-
Feng W Q and Zhang Y J. 2015. Object-oriented change detection for remote sensing images based on multi-scale fusion. Acta Geodaetica et Cartographica Sinica, 44 (10): 1142–1151. [DOI: 10.11947/j.AGCS2.0152.0140260] ( 冯文卿, 张永军. 2015. 利用多尺度融合进行面向对象的遥感影像变化检测. 测绘学报, 44 (10): 1142–1151. [DOI: 10.11947/j.AGCS2.0152.0140260] )
-
Gao S and Bui T D. 2005. Image segmentation and selective smoothing by using Mumford-Shah model. IEEE Transactions on Image Processing, 14 (10): 1537–1549. [DOI: 10.1109/TIP.2005.852200]
-
Gu D D, Xu X J and Zhang X L. 2013. SAR (Synthetic Aperture Radar) image sea-land segmentation method based on wavelet transform and OTSU threshold. CN, CN102968798A (顾丹丹, 许小剑, 张秀玲. 2013. 一种基于小波变换和OTSU阈值的SAR图像海陆分割方法. 中国, CN102968798A)
-
Hai G S, Xu C, Liu J Y, Sun K M and Wen C F. 2012. A novel multi-scale level set method for SAR image segmentation based on a statistical model. International Journal of Remote Sensing, 33 (17): 5600–5614. [DOI: 10.1080/01431161.2012.666814]
-
Heygster G, Dannenberg J and Notholt J. 2010. Topographic mapping of the german tidal flats analyzing SAR images with the waterline method. IEEE Transactions on Geoscience and Remote Sensing, 48 (3): 1019–1030. [DOI: 10.1109/TGRS.2009.2031843]
-
Hu J J, Zhao Z, Wang Z Y and Wang S S. 2017. Comparison and effectiveness evaluation for methods of coastline extraction from SAR imagery. Remote Sensing Information, 32 (4): 58–63. [DOI: 10.3969/j.issn.1000-3177.2017.04.010] ( 胡娇静, 赵争, 王志勇, 王士帅. 2017. SAR影像海岸线提取方法对比及效果评价. 遥感信息, 32 (4): 58–63. [DOI: 10.3969/j.issn.1000-3177.2017.04.010] )
-
Kou G J, Wang Z S and Yao P. 2011. Filtering methods for different characteristic stripe noise in SAR image. Journal of Remote Sensing, 15 (1): 1–12. [DOI: 10.11834/jrs.20110101] ( 寇光杰, 王贞松, 姚萍. 2011. SAR图像中不同特性条纹噪声的滤除. 遥感学报, 15 (1): 1–12. [DOI: 10.11834/jrs.20110101] )
-
Lie J, Lysaker M and Tai X C. 2006. A binary level set model and some applications to Mumford-Shah image segmentation. IEEE Transactions on Image Processing, 15 (5): 1171–1181. [DOI: 10.1109/TIP.2005.863956]
-
Lin Z Z, Lv K, Yang L, Xu W and Zhai R. 2014. A method for coastline detection based on level set. Acta Electronica Sinica, 42 (2): 391–397. [DOI: 10.3969/j.issn.0372-2112.2014.02.027] ( 林政宗, 吕科, 杨磊, 徐文, 翟锐. 2014. 基于Level Set的海岸线检测. 电子学报, 42 (2): 391–397. [DOI: 10.3969/j.issn.0372-2112.2014.02.027] )
-
Liu P C. 2015. Feature extraction of coastline contour based on level set theory. Remote Sensing for Land and Resources, 27 (2): 75–79. [DOI: 10.6046/gtzyyg.2015.02.12] ( 刘鹏程. 2015. 基于水平集理论的海岸线轮廓特征提取. 国土资源遥感, 27 (2): 75–79. [DOI: 10.6046/gtzyyg.2015.02.12] )
-
Mason D C and Davenport I J. 1996. Accurate and efficient determination of the shoreline in ERS-1 SAR images. IEEE Transactions on Geoscience and Remote Sensing, 34 (5): 1243–1253. [DOI: 10.1109/36.536540]
-
Ogawa H. 1986. A unified approach to generalized sampling theorems//Proceedings of 1986 IEEE International Conference on Acoustics, Speech, and Signal Processing. Tokyo, Japan: IEEE: 1657–1660 [DOI: 10.1109/ICASSP.1986.1168936]
-
Osher S and Fedkiw R. 2002. Level Set Methods and Dynamic Implicit Surfaces. New York: Springer-Verlag: 3–124
-
Ouyang Y and Zhong J S. 2004. Coastline detection method in SAR images based on an improved level set algorithm. Remote Sensing Technology and Application, 19 (6): 456–460. [DOI: 10.3969/j.issn.1004-0323.2004.06.005] ( 欧阳越, 种劲松. 2004. 基于改进水平截集算法的SAR图像海岸线检测. 遥感技术与应用, 19 (6): 456–460. [DOI: 10.3969/j.issn.1004-0323.2004.06.005] )
-
Sonka M, Hlavac V and Boyle R. 2008. Image Processing, Analysis, and Machine Vision. 3rd ed. Australia: Thomson Learning: 275–282
-
Tao K and Zhu J J. 2012. A hybrid indicator for determining the best decomposition scale of wavelet Denoising. Acta Geodaetica et Cartographica Sinica, 41 (5): 749–755. ( 陶珂, 朱建军. 2012. 多指标融合的小波去噪最佳分解尺度选择方法. 测绘学报, 41 (5): 749–755. )
-
Wang D K, Hou Y Q and Peng J Y. 2008. Partial Differential Equation Method for Image Processing. Beijing: Science Press: 1–121 (王大凯, 侯榆青, 彭进业. 2008. 图像处理的偏微分方程方法. 北京: 科学出版社: 1–121)
-
Wu S H, Wu Y Q, Zhou J J and Meng T L. 2015. SAR river image segmentation based on reciprocal gray entropy and improved Chan-Vese model. Acta Geodatetica et Cartographica Sinica, 44 (11): 1255–1262. [DOI: 10.11947/j.AGCS.2015.20140519] ( 吴诗婳, 吴一全, 周建江, 孟天亮. 2015. 利用倒数灰度熵和改进Chan-Vese模型进行SAR河流图像分割. 测绘学报, 44 (11): 1255–1262. [DOI: 10.11947/j.AGCS.2015.20140519] )
-
Xie M H, Zhang Y F and Fu K. 2007. Algorithm of detection coastline from SAR images based on seeds growing. Journal of the Graduate School of the Chinese Academy of Science, 24 (1): 93–98. [DOI: 10.3969/j.issn.1002-1175.2007.01.014] ( 谢明鸿, 张亚飞, 付琨. 2007. 基于种子点增长的SAR图像海岸线自动提取算法. 中国科学院研究生学报, 24 (1): 93–98. [DOI: 10.3969/j.issn.1002-1175.2007.01.014] )
-
Xu C, Hua F, Sui H G and Chen G. 2014. Automatic water segmentation method in SAR images using Muti-scale Level Set. Geomatics and Information Science of Wuhan University, 39 (1): 27–31. [DOI: 10.13203/j.whugis20120602] ( 徐川, 华凤, 眭海刚, 陈光. 2014. 多尺度水平集SAR影像水体自动分割方法. 武汉大学学报(信息科学版), 39 (1): 27–31. [DOI: 10.13203/j.whugis20120602] )
-
Yu C X, Wang J Y, Xu J, Peng R C, Cheng Y and Wang M. 2014. Advance of coastline extraction technology. Journal of Geomatics Science and Technology, 31 (3): 305–309. [DOI: 10.3969/j.issn.1673-6338.2014.03.018] ( 于彩霞, 王家耀, 许军, 彭认灿, 成毅, 王沫. 2014. 海岸线提取技术研究进展. 测绘科学技术学报, 31 (3): 305–309. [DOI: 10.3969/j.issn.1673-6338.2014.03.018] )
-
Zhang K H, Zhang L, Song H H and Zhou W G. 2010. Active contours with selective local or global segmentation: a new formulation and level set method. Images and Vision Computing, 28 (4): 668–676. [DOI: 10.1016/j.imavis.2009.10.009]


