


|
收稿日期: 2016-11-03; 优先数字出版日期: 2017-11-01
基金项目: 广东省省级科技计划项目(编号:2017B020216001);中国博士后科学基金资助项目(编号:2017M612792);广东省水利科技创新项目(编号:2016-08);中山大学青年教师培育项目(编号:17lgpy41)
第一作者简介: 刘永明(1990— ),男,博士研究生,研究方向为水深水质定量遥感。E-mail:liuyongmingA401@outlook.com
通讯作者简介: 邓孺孺(1963— ),男,教授,研究方向为水质遥感与大气环境遥感。E-mail:eesdrr@mail.sysu.edu.cn
中图分类号: P229
文献标识码: A
|
摘要
机载激光雷达测深系统(ALB)是除声呐测深系统之外最可靠的遥感水深测量系统。随着ALB的商业化,越来越多的研究机构能够获取到水体全回波数据,对水体全回波数据的处理方法也越来越多。本文首先介绍ALB测量原理的基础上,对全波数据的预处理和波峰搜索算法进行概述,并对这些处理方法的优缺点进行总结。考虑到激光脉冲和水面、水体以及水底的作用是个复杂的过程,所以文章接着分析了影响ALB测深精度的主要因素(水深、水质和水下底质反射率),并在最后总结归纳了ALB系统在水下地物分类中的最新应用现状和未来应用的发展趋势。
关键词
机载激光雷达测深, 水深, 地物分类, 回波数据, 高光谱
Abstract
Aside from sonar systems, Airborne LIDAR Bathymetry (ALB) has become the most reliable depthometer. With the commercialization of ALB, several companies have produced powerful ALB, and research institutions have obtained the full-waveform data of water. Meanwhile, several algorithms have been proposed to process the signal of ALB. In this work, we introduce the theoretical basis of ALB and then review algorithms of correction for pulse stretching and peak finding of full waveform. Then, we analyze the main influencing factors of accuracy, including water depth, water color, and reflectance of substrates. We also provide an overview of the new application of ALB in substrate classification. In specific, ALB can help retrieve information from full waveform to the maximum extent. We draw the following conclusions: (1) Pulse stretching is mainly caused by the topography of substrate, whereas algorithms for correcting pulse stretching have been developed under the consideration of general terrain slope or incident angle of pulse. The complex topography of substrate should be considered, especially for the application in coral reef, where substrates distribute inhomogeneity. (2) Algorithms of peak finding of full waveform can be separated into three kinds: echo detection, mathematical approximation, and deconvolution. Echo detection methods run fast but are influenced by environmental noise more easily. The object function of mathematical approximation methods is difficult to be solved, but environmental parameters such as water attenuation coefficient can be derived. Deconvolution methods are stable but need to take effective measures to suppress noise. (3) The proposed algorithm cannot work well for extremely shallow water, especially at depths within centimeter level, but polarization lidar may solve the problem in the future. Low water quality and low reflectance of substrate reduce signal and noise ratio. Thus, new algorithms need to be developed for these conditions in the future. (4) The new application of ALB in substrate classification and data fusion with hyperspectral image indicates that further information in full waveform of water should be retrieved in the future.
Key words
airborne LiDAR bathymetry, water depth, substrate classification, full waveform, hyperspectral
1 引 言
机载激光雷达测深系统是集激光系统、全球定位系统和惯性导航系统等于一体的主动遥感测深系统,简称ALB(Airborne LIDAR Bathymetry)(Guenther和Thomas,1983;Guenther,2007)。从20世纪60年代末开始,经美国、加拿大和瑞典等国家的研究和发展,如今已有较为成熟的商业机载激光雷达测深系统,测量精度普遍达到了国际水道测量组织(IHO)一级标准,如SHOALS系列(Tuell和Park,2004;Collin 等,2008a;Allouis 等,2010)、VQ—820G(Pfennigbauer 等,2011;Mandlburger 等,2013)、LADS Mk系列(Zavalas 等,2014;Parker和Sinclair,2012)、Hawk Eye系列(Tulldahl和Wikström,2012)、EAARL(Kinzel 等,2013)和CZMIL(Tuell 等,2010)等,各个系统的相关参数详见表1。这些系统在河流海岸带水深测量(Pan 等,2015)、珊瑚礁的监测(Goodman 等,2013)、水下考古(Doneus 等,2012)、水面油污的监测(Park,2014)和水下鱼群的监测(Brown 等,2002;Kinzel 等,2013)等多个领域得到广泛应用。
表 1 现有ALB系统的操作参数
Table 1 Operational characters of existing ALB systems
| ALB名称 | 生产商 | 波段 | 脉冲频率/kHz | 最大测量深度 | 散射角度/mrad | 系统重量/kg | 操作高度/m | 是否有红外波段 | 数据来源 |
| SHOALS-1000 | Teledyne Optech, Inc. | 532 | 1 | 50 m | 是 | Teledyne Optech, Inc官网 | |||
| SHOALS-3000 | Teledyne Optech, Inc. | 532 | 3 | 60 m | 5 | 217 | 300—400 | 是 | |
| CZMIL Nova | Teledyne Optech, Inc. | 浅水532 | 70 | 2 Kd(水底反射率大于0.15) | 0.37 | 287 | 400—1000 | 是 | |
| 深水532 | 10 | 4.2 Kd(水底反射率大于0.15) | |||||||
| CZMIL | Teledyne Optech, Inc. | 浅水532 | 70 | 30 m | 1.9×7 6.25 | 360 | 400 | 是 | |
| 深水532 | 10 | ||||||||
| Titan | Teledyne Optech | 532 | 50—300 | 1.5 Kd | 0.35 | >116 | 300—600 | 是 | |
| VQ—880G | REIGL | 532 | 550 | 1.5 secchi(底质反射率大于0.8) | 0.7—2.0 | 62—65 | 600 | 是 | REIGL, Inc.官网 |
| VQ—820G | REIGL | 532 | 520 | 1 secchi | 1 | 25.5 | 600 | 否 | |
| Hawk-EyeIII | Leica, Inc. | 深水532 | 10 | 3 secchi | 400—600 | 是 | Leica, Inc.官网 | ||
| 浅水532 | 35 | 1.5 secchi | |||||||
| Chiroptera II | Leica, Inc. | 532 | 35 | 1.5 secchi | <80 | 400—600 | 否 | ||
| LADS Mk 3 | fugro, Inc. | 532 | 1.5 | 80 m | 132 | 1000 | 否 | Parker和Sinclair,2012 | |
| Hawk-EyeII | Saab | 532 | 4 | 3 secchi | 1 | <190 | 250—500 | 是 | Axelsson, 2010 |
| CATS | Fibertek, Inc. | 532 | 8 | I0.13T3.3 | 40 | 500—1000 | 否 | Fernandez-Diaz等人,2014 | |
| Aquarius | NCALM | 532 | 70 | 12 m | 1 | 85 | 300—500 | 否 | |
| EAARL | NASA | 532 | 5 | 25 m | 1.5—2 | 114 | 300 | 否 | Nayegandhi等人,2009 |
水深测量是水底地形测量的基本工作(周立,2013)。目前水深测量最可靠的方式是船载声呐测深系统和机载激光雷达测深系统(Klemas,2016)。Costa等人(2009)使用激光雷达测深系统和多波束声呐测深系统在同一块浅水区域进行探测对比,结果表明ALB系统的性价比比声呐系统高。与被动遥感反演水深相比,ALB系统能测量的水深更深,精度更高,常被用来验证被动遥感反演的水深精度(Lee 等,2007)。
机载激光雷达测深系统属于全回波系统(full-waveform system)(Guenther Mesick,1988),记录的信息是和时间相关的激光回波信号,通常采用穿透水体能力较强的532 nm蓝绿激光波段,如CATS系统、EAARL系统和Aquarius系统,但也有部分系统会同时搭载1064 nm的红外激光系统进行陆地高程和水面高的测量,如Hawk Eye和CZMIL。全回波系统的优势是能够较为完整地记录每个后向散射的脉冲,给用户提供激光脉冲在传播中更加完善的信息。Guenther等人(2000)指出21世纪ALB系统面对的挑战是精度,其中关于ALB全波数据的处理算法是关键。Mallet和Bretar(2009)概述了陆地回波数据的研究现状,并对ALB系统全波数据的处理现状进行了简单概述。周静平等人(2013)对全回波数据的处理算法进行了简单归纳,特别是陆地系统的回波数据。Wang等人(2015)进行ALB全回波数据算法对比时也进行了概述,但侧重于波峰探测算法对比,分析的不够全面。因此,本文对ALB回波数据的处理算法进行了较为完整的综述,主要包括全回波数据的校正处理和波峰搜索两部分,并对影响测量精度的主要因素进行分析,包括水深、水质和水底反射率。随着对全回波数据的挖掘和认识,ALB系统也逐步应用于水下地物分类,文章最后对这部分应用的研究现状进行了总结,并分析未来应用的发展方向。
2 机载激光雷达测深原理
2.1 ALB测量水深物理原理
2.1.1 激光雷达方程
水体激光雷达测深系统和陆地激光雷达系统的激光雷达方程可以用相同的公式表达。假设散射率为ρ的某目标物和激光雷达探测器的距离为R,该系统发射功率为Pt的激光脉冲到达目标物表面,激光束的散射角度是βt,在目标物上的照射范围是As,假设目标物将能量散射到一个角度为Ω圆锥体中,则单位面积上接收到的辐射密度Sr可表示为(Wagner 等,2006)
|
${{S_{\rm{r}}} = \displaystyle\frac{{4{P_{\rm{t}}}}}{{{\text{π}}{R^2}\beta _{\rm{t}}^2}}\rho {A_{\rm{s}}}\frac{1}{{{\text{π}}{R^2}}}}$
|
(1) |
对于孔径为Dr的接收器接收到的能量Pr可以表达如下(Wagner 等,2006)
|
${P_{\rm{r}}} = {S_{\rm{r}}}\frac{{{\text{π}}D_{\rm{r}}^2}}{4}$
|
(2) |
分开传感器和目标物的参数,式(2)可以表示为(Wagner 等,2006)
|
${{P_{\rm{r}}} = \displaystyle\frac{{{P_{\rm{t}}}D_{\rm{r}}^2}}{{4{\text{π}}{R^4}\beta _{\rm{t}}^2}}\sigma }$
|
(3) |
式中,
|
${{P_{\rm{r}}}(t) = \displaystyle\frac{{D_{\rm{r}}^2}}{{4{\text{π}}{R^2}{\beta }_{\rm{t}}^2}}{P_{\rm{t}}}\left(t - \frac{{2R}}{{{v_{\rm{g}}}}}\right)\sigma }$
|
(4) |
式中,t是时间,vg是脉冲的群速度。对于空间分布的散射体,接收的信号可以表示来自不同距离或时间的信号叠加(Wagner 等,2006)
|
${{P_{{\rm{r,t}}}}(t) = \displaystyle\frac{{D_{\rm{r}}^2}}{{4{\text{π}}\beta _{\rm{t}}^2}}\int\limits_{{R_i} - \Delta R}^{{R_i} + \Delta R} {\frac{1}{{{R^4}}}} {P_{\rm{t}}}(t - \frac{{2R}}{{{v_{\rm{g}}}}}){\sigma _i}(R){\rm{d}}R}$
|
(5) |
式中,ΔR是散射体在距离方向上的空间范围,当ΔR
|
$\begin{aligned}{P_{{\rm{r}},{\rm{t}}}}(t) \approx & \frac{{D_{\rm{r}}^2}}{{4\text{π}{R_i}^4\beta _{\rm{t}}^2}}\int\limits_{{R_i} - \Delta R}^{{R_i} + \Delta R} {{P_{\rm{t}}}(t - \frac{{2R}}{{{v_{\rm{g}}}}}) {\sigma _i}(R){\rm{d}}R} = \\ &\frac{{D_{\rm{r}}^2}}{{4\text{π} {R_i}^4\beta _{\rm{t}}^2}}{P_{\rm{t}}}(t) * {\sigma _i}^\prime (t)\end{aligned}$
|
(6) |
引进系统接收器的影响,用
|
$\begin{aligned}{P_{{\rm{r}},{\rm{t}}}}(t) = & \frac{{D_{\rm{r}}^2}}{{4\text{π} {R_i}^4\beta _{\rm{t}}^2}}{P_{\rm{t}}}(t) * {\sigma _i}^\prime (t) * \Gamma (t) = \\ &\frac{{D_{\rm{r}}^2}}{{4\text{π} {R_i}^4\beta _{\rm{t}}^2}}{P_{\rm{t}}}(t) * \Gamma (t) * {\sigma _i}^\prime (t) = \frac{{D_{\rm{r}}^2}}{{4\text{π} {R_i}^4\beta _{\rm{t}}^2}}S(t) * {\sigma _i}^\prime (t)\end{aligned}$
|
(7) |
式中,S(t)表示系统波形,等于发射脉冲和接收响应函数的卷积。所以最终接收的信号可表示为系统波形和散射体后向散射截面积的卷积。
2.1.2 水体激光回波的组成
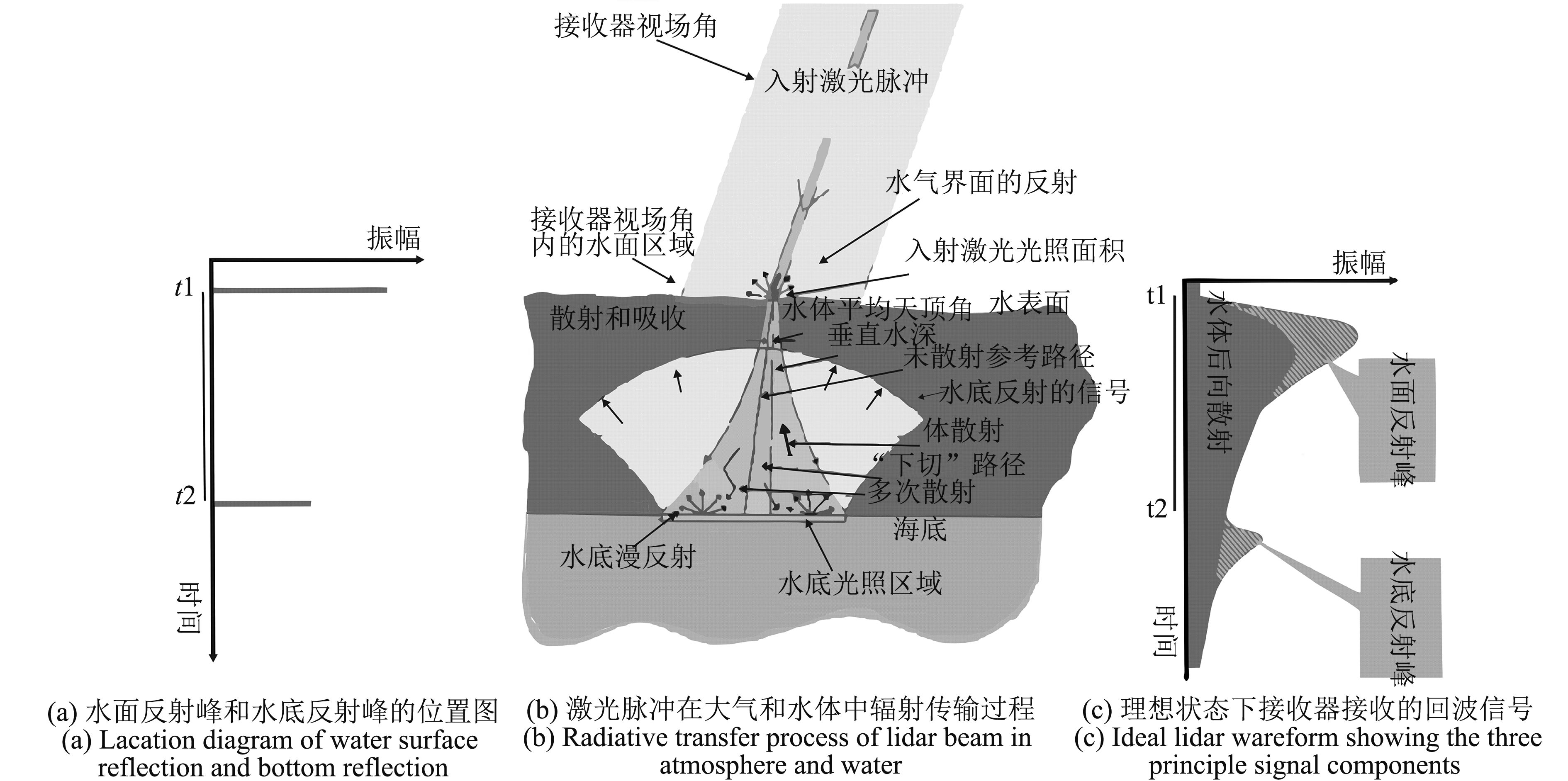
机载激光雷达测深系统的测深原理如图1(b)。当时间为t的时候,接收器接收到的回波信号的值PT(t)可以表示为(Feigels,1992;Abdallah 等,2012)
|
${P_{\rm{T}}}(t) \!=\!\! \sum\limits_{r = 1}^i {{p_{\rm{r}}}(t) \!=\! {p_{\rm{s}}}(t) \!+\! {p_{\rm{c}}}(t) \!+\! {p_{\rm{b}}}(t) \!+\! {p_{{\rm{bg}}}}(t) \!+\! {p_{\rm{N}}}(t)} $
|
(8) |
式中,ps是水面反射的能量;pc是水体反射的能量;pb是水底底质反射的能量,通常假设底质是朗伯体(Mobley 等,2003;Wang和Philpot,2007);pbg是背景光的贡献能量;pN是仪器噪声。

2.2 ALB水深计算方程
结合激光的传输过程和图1(c)可知,忽略噪声的理想情况下,ALB系统获取的水体回波信号主要由3部分组成:水气界面的反射值、水体后向散射值和水底底质的反射值(Wozencraft,2003;Wang和Philpot,2007;Wozencraft和Park,2013)。如图1(a)和图1(c)所示,系统记录水面反射峰的时间为t1,记录水底反射峰的时间为t2,设T2=t2–t1,理论上T1是激光脉冲在水中的传播时间。如果不考虑各种环境因素对回波形状产生的影响,T1可近似等于T2,那么粗略的瞬时水深值可表示为(Muirhead和Cracknell,1986)
|
$H = a \cdot c \cdot \frac{{T2}}{{2n}}$
|
(9) |
式中,c代表光在真空中的传播速度,n表示水的折射率,a是和光在水中传播角度相关的参数。在实际环境中,受水下地形、波浪以及观测角度的影响,ALB系统记录的回波信号会发生形变。直接应用上述公式进行水深计算,将会影响水深的计算精度(Guenther和Thomas,1983)。因此,需要消除水底坡度或观测角度对回波形状的拉伸作用,以及风浪对折射角的影响,然后从回波信号中确定水面反射峰和水底反射峰的准确位置,再进行水深的计算。
3 水体激光全回波数据处理
3.1 水体激光全回波数据预处理
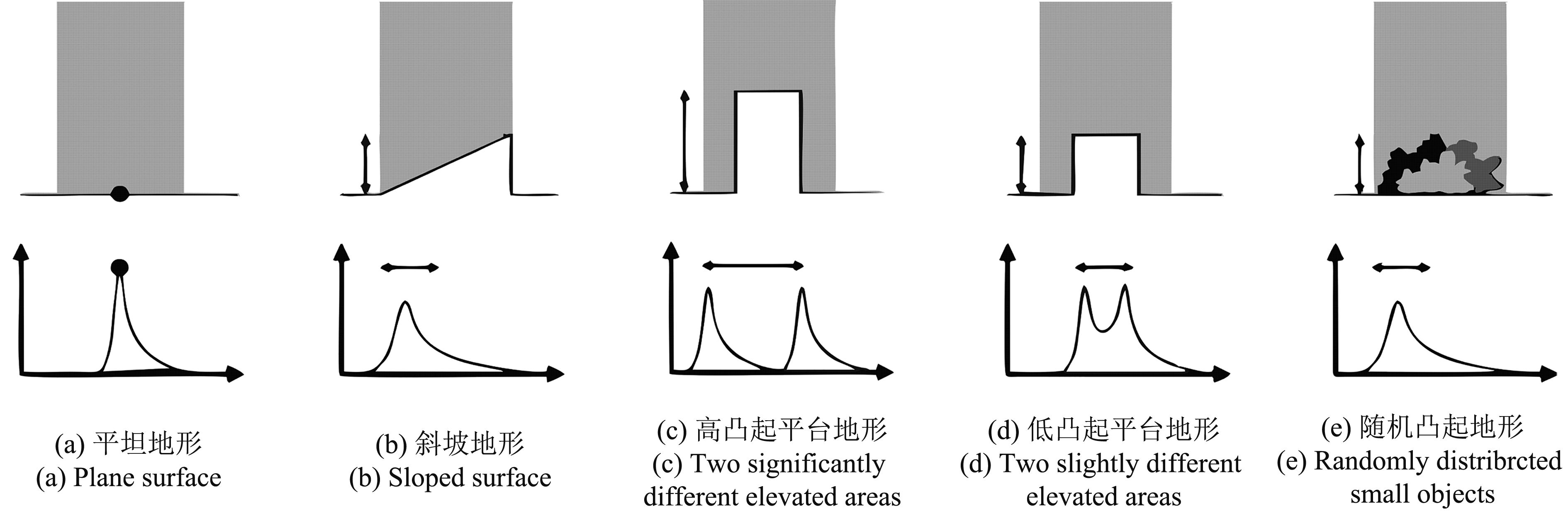
Guenther等人(2000)指出21世纪ALB系统的发展方向是提高测量精度。根据ALB系统的测深原理,激光发射器发射的激光会有一个较小的发散角,使得激光到达水面或水底后会形成一个光斑(图1(b)),光斑照射范围内的地形会影响激光回波信号的正常成型。如图2(a)所示,当接收器的接收方向和底质平面垂直时,接收到水底反射的回波峰值形状是合理准确的。但是当接收器接收回波的方向和光斑内的水底平面不垂直时(图2(b)),首先接收到离接收器最近的底质反射回来的信息,然后再接收到离传感器较远的底质反射回来的信息,使得激光回波信号产生拉伸,波峰降低(Wang和Philpot,2007)。Steinvall等人(1996)详细阐述了观测角度和水底坡度对回波信号的拉伸影响,并给出校正系数和入射角度之间的关系
|
$g({\theta _i}) = \left\{ {\begin{array}{*{20}{c}}{0.9651\exp (0.0457{\theta _i})}&{ - 90 < {\theta _i} < 0}\\[7pt]{1.0021\exp ( - 0.0359{\theta _i})}&{0 < {\theta _i} < 90}\end{array}} \right.$
|
(10) |
Wang和Philpot(2007)据此总结了校正水底坡度的步骤:
(1)根据邻接点测量的激光水深和激光光束相对水底的角度评估坡度;
(2)在实验室进行简单的反射率测量实验,校正非朗勃体引起的方向性反射率;
(3)利用式(10)消除拉伸作用。
Wang和Philpot(2007)同时也发现当水深增加时,水底相对传感器观测角的坡度影响减少。而斜坡是众多地形中较为简单的一类,图2是Jutzi和Stilla(2006)模拟的几种陆地地形和底质反射峰,类似情形同样适用于图3所示的珊瑚岛礁水底地形。但是目前对图2(c)、(d)、(e)所示的水底地形类型,暂未有较好的校正方式,未来需要进一步考虑类似复杂的情形。
另外,Bouhdaoui等人(2014)在1维空间上,假设水底激光光斑直径范围内是由一系列不同长度和坡度的线段组成,然后将此1维水底模型集成到现有的水体激光回波模拟模型中,正演结果不仅证明坡度越高,对回波信号的拉伸效果越明显,还证明光斑直径越大,光斑范围内包含的水底地形越复杂,对水底反射峰的拉伸作用就越强,甚至出现多个底质反射峰的现象。鉴于激光光斑大小会影响水底反射峰形成的因素,适当的缩小光斑大小可以减小这种影响,所以现在新型ALB系统的脉冲散射角大小在减小,如Teledyne Optech的Titan和REIGL的VQ—880G。
激光脉冲通常以一定的倾斜角度入射到水中倾斜传播,目前主要有两种方式消除倾斜传播的影响,一种是计算完水深后再乘以和倾斜角相关的系数(Guenther,2007);另一种是先对回波信号进行正射投影变化,再计算水深。Pan等人(2016)对比利用正射变化后的回波和未经过正射变化的回波计算出的水深,当水质较好时,两种数据计算出的水深精度相差无几,但是从正射回波数据计算出的水深数据集标准偏差减小了,且水质较为混浊时,从正射回波数据中计算出的水深精度更高。
3.2 水体激光全回波波峰搜索算法
对激光回波信号进行校正后,下一步是寻找回波中水气界面反射峰和底质反射峰对应的时间。Pan等人(2015)提出目前并不存在一个回波数据处理算法适合所有的环境。激光回波数据的反射峰提取有多种方法,根据不同方法的原理可分为3类,分别是波峰探测法、反卷积法和数学模拟法。
3.2.1 波峰探测法
波峰探测法主要从回波数据的形状出发搜寻波峰的位置,相当于求一条曲线的极大值或极小值,目前主要有求导法和阈值法。激光雷达测深系统EAARL自带水深算法的软件ALPS(Kinzel 等,2013),首先使用二次求导结果的拐点确定回波数据的水面反射峰,然后进行水底反射峰值搜索。2011年前的APLS软件包是将在确定水面反射峰后,再从左向右搜索代表底质的反射峰,称为最大峰值法(MP),这种方法的关键在于选择区别水体散射峰和底质反射峰的阈值。2011年后ALPS软件包中的算法是在确定水面反射峰后从右开始向左搜索底质反射峰,利用底质反射峰是最后形成的原则,所以这种算法能够避免把水层中杂物反射峰当作水底的反射峰(Nayegandhi 等,2009)。
ASDF方法属于阈值法。一般噪声形成的波峰峰态和系统发射的脉冲峰态有较大的差别,而水面、水底反射形成的峰和系统发射的脉冲峰峰态很相似,目前主要有3种方法利用该原理计算参考波峰x1(发射脉冲)和记录的全波数据中的每个峰x2之间的峰态差异值R,其中ASDF方法使用均方差计算
|
${R_{{\rm{ASDF}}}} = \frac{1}{N}\sum\limits_{k = 1}^N {{{({x_1} - {x_2})}^2}} $
|
(11) |
差异值越小说明记录的峰值越有可能是由反射形成的,然后从ASDF图像中挑选出局部最小值,为了获取目标物水面和水底的反射峰,需要设定阈值从多个最小值中挑选,最后确定目标物的波峰,这种方法的优点是能够有效地抑制激振噪声(Roncat 等,2008)。DC(Direct Correlation)方法也是利用参考峰和记录峰之间的的相似性来寻找目标物的反射峰,表达如下(Roncat 等,2008)
|
${R_{{\rm{DC}}}} = \frac{1}{N}\sum\limits_{k = 1}^N {{x_1} * {x_2}} $
|
(12) |
如果将ASDF结果归一化到[0, 1]和DC方法就相同了(Roncat 等,2008)。另外Jacovitti和Scarano(1993)提到使用平均幅度差函数来计算相关性,也能达道识别特定波峰的目的,且该方法不包含乘法运算,计算速度更快。
3.2.2 反卷积法
根据激光雷达方程式(7),接收器接收观测到的信号y(n)可以用简单的公式表示(Parrish 等,2011)
|
$y(n) = h(n) * x(n)$
|
(13) |
式中,h(n)是脉冲响应函数,属于探测目标的固有属性,可以通过测量一个接近朗伯体反射面反射的信号获取,如平静的水面或混泥土地(Parrish和Nowak,2009),该响应函数一般呈高斯分布,如图1(c)的水面波峰部分;x(n)是理想未降质的信号,也可表示为波峰的振幅(图1(c)),属于需要计算的未知参数;符号“*”表示卷积运算。经过傅里叶变化后可以在频率域内通过简单的运算得到未知参数x(n),但是由于接收系统的非理想特性会使观察和记录的信号降质,实际记录的信号中会包含噪声η(n)
|
$y(n)= h(n)*x(n) + \eta (n)$
|
(14) |
反卷积是使降质的信号复原的基本方法,但是受噪声的影响,一般的反卷积方法是病态的,而统计迭代法是目前处理噪声信号最好的一类反卷积算法。目前被引进用于全波数据处理的反卷积算法有傅里叶变换法(Harsdorf和Reuter,2000)、Richardson–Lucy算法(Nordin,2006)、维纳滤波器(Parrish 等,2011)和最大期望(EM)算法(马洪超和李奇,2009)等,其中用于ALB全波数据处理的方法主要有Richardson–Lucy算法、维纳滤波器和最小二乘法等。Richardson–Lucy算法派生自贝叶斯理论,属于极大似然估计法,通过迭代来求取符合某一分布的参数,然后把可能性最大的估计值当做结果。该算法理论最初用于天文图像的恢复,恢复天文图像时假设频率域中的原始图像服从泊松分布(Lucy,1974)。在处理LIDAR回波数据时需要把回波数据当做1×N的图像进行处理(Wu 等,2011),把系统贡献部分看做高斯分布,对需要求解的原始信号x(n)进行迭代运算的表达如下
|
${\hat x_{i + 1}}(n) = {\hat x_i}(n)\left[ {\frac{{y(n)}}{{h(n)*{{\hat x}_i}(n)}}*h(n)} \right]$
|
(15) |
每迭代一次都会提高解的似然性,当运行到限定的次数或者似然性达到一定的阈值时,可获得局部最大似然解。
维纳滤波器(Wiener filter)以最小均方误差为最优准则,是信号处理领域中比较经典的信号复原滤波器(邹谋炎,2001)。理想的
|
$\varepsilon = \left({(\hat x(n) - \tilde x(n))^2}\right)$
|
(16) |
式中,
|
$W(n) = \frac{{|H(\omega ){|^2}}}{{|H(\omega ){|^2} + \displaystyle\frac{{{P_{\rm{N}}}(\omega )}}{{{P_{\rm{x}}}(\omega )}}}}$
|
(17) |
假设信号和噪声有独立的分布规律(Pruksch和Fleischmann,1998),式中,H(ω)是在频率域内对接收信号y(n)进行低通滤波得到的。
在陆地激光回波数据处理领域,EM算法用的较多(Persson 等,2005),该算法一般用来计算基于不完全数据的极大似然估计(王爱平 等,2009),受水体散射过程的影响,暂时还未被单独用来处理水体激光回波数据。Wu等人(2011)对比Richardson–Lucy算法、维纳(Wiener)滤波器和最小二乘法3种反卷积的算法在处理植被回波数据时,发现Richardson–Lucy算法在寻找不易察觉的局部峰值方面具有优势,但是从Richardson–Lucy算法计算水深的理论过程可以看出Richardson–Lucy方法的迭代次数较多,会消耗较多的时间,这与Wang等人(2015)的实验结果相应。
3.2.3 数学模拟法
数学模拟法又可称为分解法,通过匹配模拟回波和实测回波达到计算的目的。采用数学模拟法的第一步是利用具有物理意义的数学公式仿真上述公式中的每一部分信号,通常需要结合水体辐射传输理论,如式(8)。目前这类仿真模型主要是基于单次散射的激光雷达方程(Harsdorf和Reuter,2000),如多次前向—单次后向散射模型(multiple-forward-single-backscattering Model)(Kopilevich 等,2005)和Wa-LiD模型(Abdallah 等,2012)。
ALB系统发射的激光脉冲近似服从高斯分布,激光传输过程中,被反射的每部分能量也近似认为服从高斯分布,所以很多数学模拟模型都基于高斯分布的变式。如Wong和Antoniou(1991)忽略水体反射的那部分能量,用指数修正的高斯分布描述水面反射信号,用高斯分布描述底质反射信号,从而模拟了LARSEN传感器接收的回波信号。Chauve等人(2007)引入对数高斯分布分别表示上述几部分反射的能量,提升高斯分布模拟回波信号精度。与激光在植被丛中传输相比,在水中的传输过程更为复杂,一般的模型是将水中每层薄层水的散射信号都当做某种具有对称性的分布来看待,如归一化高斯分布函数、威布尔分布函数和Nakagami分布函数(Mallet 等,2013),然后通过积分来综合水体散射的激光信号,但是需要假设水体是垂直均匀分布的,这会影响模拟结果(Mobley,1994)。鉴于水体漫散射的特征,Abdallah等人(2013)分别使用三角形和威布尔分布拟合水体反射和底质的反射峰。Abady等人(2014)提出用四边形分布表示水体反射的那部分总能量,减少了模型的复杂度,同时避免了水体反射峰对底质和水面反射峰的影响,对比结果表明四边形法要比三角形法的水深反演精度高,但只是基于模拟的数据,还是要在实际应用中进一步验证。
构建好数学模型后,利用模拟的回波和实测的回波构建目标函数,通过计算目标函数得到数学表达式中的一些未知数值。目标函数较多是多元非线性,求解较为复杂,目前主要求解目标函数的主流方法是Levenberg-Marquardt(Wagner 等,2007)。虽然目标函数中未知数较多,但是能够获取除水深信息之外的一些信息,如底质的反射率和水质参数,这也是数学模拟法的优势所在,将在第4部分详细介绍。
综上所述,对3种波峰搜索算法的主要优缺点进行统计,如表2所示。
表 2 3种主要的回波数据处理方法
Table 2 Three main methods of processing full-waveform
| 种类 | 算法名 | 优点 | 缺点 |
| 波峰探测法 | MP(Maximum Peak) | 计算速度快。 | 容易将水层物质的反射峰误判为水底反射峰。 |
| LP(Last Peak) | 搜索波峰高效,避免将水层物质的反射峰误当做水底反射峰。 | 阈值不容易确定,容易和噪声混淆。 | |
| ASDF&DC(阈值法) | 能够有效的避免激振效应引起的噪声 | 对波峰的形状敏感。 | |
| 反卷积法 | Richardson–Lucy法 | 容易识别局部小峰,计算精度高。 | 迭代次数多,较耗时。迭代中不能有效的控制噪声 |
| 维纳滤波器 | 运行速度快,精度高,有效提高回波数据在距离上的分辨率。 | 需要预先设置和噪声相关的参数。 | |
| 小波变化法 | 处理河流回波数据上精度更稳定。 | 受水质影响较大。 | |
| 数学模拟法 | 高斯分解法 | 能够获取除波峰位置之外的一些信息,例如散射截面积。 | 参数较多,求解复杂,使用用高斯分布表达水体反射的能量不合理。 |
| 三角形法 | 能够取代高斯分布,有效的表达水体反射的那部分能量。 | 参数较多,求解复杂。 | |
| 四边形法 | 能够取代高斯分布,有效的表达水体反射的能量。 | 参数较多,求解复杂。 |
实际应用中这些方法经常有交叉。使用非线性优化方法求解数学模拟法构建的目标函数,其精度很大程度上取决于初始值(Chauve 等,2007),所以可将波峰探测方法计算得到的波峰位置值作为初始值带入最后的目标函数进行求解(Roncat 等,2008)。利用连续小波变化能够识别波峰的优势,Pan等人(2015)将回波信号反卷积为多个子波,然后将这些子波的峰值作为初始值带入最大期望算法中进行迭代运算,得到底质反射率的峰值和位置,对比利用二次求导获取初始值的方法,使用小波变化的方法在处理河流回波数据上精度更稳定,但是这类方法不适合水体混浊度高的区域。建议交叉使用这些算法,发挥各类算法的优势,提高水深的计算精度。
3.3 影响水深计算精度关键性因素
3.3.1 水深对精度的影响
随着海岸带水陆一体化地形测量的需求增加(毕世普 等,2012;Zavalas 等,2014),ALB系统测量的最小水深范围备受关注。对于极浅水范围的定义是依水质环境而异,水质条件较好的区域极浅水的范围是1 m以内(Kinzel 等,2007;Legleiter 等,2016);对水质较差的区域,极浅水的范围是2 m以内(Pe’eri和Philpot,2007;Battaglia,2010)。Bailly等人(2010)指出,如果严格按照信噪比理论,当测量的水深小于普通测量的标准偏差时,该最小测量值不可靠,所以当提高ALB普通水深测量精度后,对极浅水的测量才有价值。一般的回波数据处理方法对极浅水的水深计算效果不佳,目前主要是通过回归回波数据的形状和水深之间的关系进行计算,未来极化激光雷达测深系统应该能够较好地解决这个问题。
Legleiter等人(2016)对位于科罗拉多中北部水质条件较好的科罗拉多河的研究表明,Aquarius激光雷达测深系统无法测量水深小于11 cm的水深,主要是因为激光回波中水面反射峰和底质反射峰形成的时间差小于接收器数字化回波的采样时间,从而无法形成水面和水底反射峰。理论上测量的最小深度主要受光电系统采样的频率影响,即ALB系统在距离方向上的分辨率。根据上述水深的计算(式(9))可知某类系统的理论测量最小值Hmin可以表达如下(Bouhdaoui 等,2014)
|
${H_{\min }} = a \cdot c \cdot \frac{T}{{2n}}$
|
(18) |
式中,T是ALB系统接收信号的采样周期。虽然提高接收器采样激光回波的频率能够提高最小水深的测量精度,但是同时会增大系统数据存储空间的负荷,且随着水深的减小,水体受底质的影响会更混浊,水底反射峰的形成更困难。Kinzel等人(2007)发现当水较浅时,许多激光回波数据呈现单峰形状,为了通过区别近水表层和水底反射峰的位置来估计浅水河床的位置,模拟激光信号在水中指数衰减的过程,然后减去由水体后向散射的那部分能量。Pe’eri和Philpot(2007)依据红光(Raman)波段激光回波数据的形状和水深之间的统计关系,计算得到蓝绿波段无法计算的浅水水深(小于2 m),但是这种方法容易受叶绿素荧光效应的影响,所以适合没有植被覆盖的底质。Allouis等人(2010)提出利用红外回波信号将水面反射的部分从绿光的回波中剔除,再利用非线性最小二乘法匹配剩下的水底回波和数学模拟值,达到区分水面反射峰和水底反射峰的目的,且基于Pe’eri和Philpot(2007)的方法提出主成分分析法,对两种方法进行比较发现回波匹配法的精度较高,但是匹配法能探测的最小深度大于主成分法。Battaglia(2010)处理CALIPSO星载激光雷达数据的研究表明,当扫描较浅水域时,横向极化的绿光会增加,这表明横向极化的绿光和水深之间有联系。同样地,Mitchell等人(2010)耦合532 nm激光发射器和光学偏正元件,提出利用水体对激光的偏正作用实现对浅水水深测量,实验室的测试结果显示测量3 cm水深的不确定度是±3 mm,这说明未来极化激光雷达有可能解决厘米级别浅水的水深测量。
3.3.2 水质和底质反射率对精度的影响
水体的吸收和散射作用会限制ALB系统的最大测量深度,在海洋光学中,经常用secchi深度或漫射衰减系数K来表示水体的吸收和散射效果,其中ALB系统最大测量深度和水质参数由漫射衰减系数K之间通用的经验关系表达如下(Muirhead和Cracknell,1986)
|
${D_{\rm{m}}} = \frac{{\ln ({p^*}/{P_{\rm{b}}})}}{{2K}}$
|
(19) |
式中,
从表1中可以看出有多个商业ALB系统的参数是在设定的底质反射率下测得的,结合激光雷达测量水深的原理可知,底质的反射率要足够高才有可能生成可识别的底质反射峰,再加上水体对水底反射能量的衰减效果,会使得底质反射峰的波峰更低。较多的河口区域悬浮泥沙较重,底质以淤泥为主(邓孺孺 等,2003;Lee 等,2016),使得回波数据的形态更复杂,如何克服这些因素的影响,是提高ALB系统测量精度的关键,也是未来拓展ALB应用区域的核心技术之一。
4 ALB水下地物分类应用现状
ALB系统接收的全回波数据中不仅包含水深信息,还包括与底质类型相关的信息。水下底质空间分布研究对水环境的管理和监测至关重要(Klonowski,2007),目前水下底质的分类主要是潜水观测和遥感探测两类。底质类型不同,理论上底质在532 nm处的反射率会有差异。Wagner等人(2006)对激光雷达的散射截面积定义表明,散射截面积和目标物质的反射率、大小和散射方向有关,而反射率是物质本身的特性,说明对散射截面积的求解,可实现对目标物的分类。Goodman等人(2013)总结了激光雷达测深研究领域几种和反射率(reflectivity)相关的概念,分别是反射率、相对反射率、伪反射率和绝对反射率:反射率和反射的激光能量密度是一个概念;相对反射率代表像素或像素云之间的反射率差异;伪反射率或绝对反射率是指将具有物理意义的方程用于全回波分析中得到的反射率,其中绝对反射率的获取需要将能量定标成辐亮度,而伪反射率是和能量相关的函数。然而仅利用回波数据中反演的单波段反射率信息进行水下地物分类的精度有限(Tuell和Park,2004),目前主要有两种方式提升LIDAR分类精度的方法,一是和被动遥感数据融合进行分类,二是挖掘全回波数据中的其他信息辅助分类。
4.1 与被动遥感结合
Hossain等人(2014)指出,并不存在单一的遥感手段适合所有的遥感应用,合理的组合所有可能的观测方式可以提高遥感定量观测的精度。融合LIDAR数据和高光谱数据在海岸带、河流和珊瑚礁进行制图是目前比较热门的研究领域(Goodman 等,2013)。加拿大Opetch公司开发的HydroFusion软件,考虑了载体飞机在进行数据采集时会同时搭载ALB系统、高光谱成像系统和数据测量摄像机,在软件包中包含了数据融合模块。从前面介绍的回波数据处理方法中可知,ALB数据中可以计算出多个参数,包括水底反射率、水深和水质等,将这些参数融合到被动遥感辐射传输模型中,可以有效地提高底质分类结果,这是目前融合ALB和被动遥感技术的主要方法。Tuell和Park(2004)使用高光谱数据对底质进行分类时,将ALB测量的水深数据作为高光谱反演模型进行底质分类的限制条件,提升了底质分类精度。Kopilevich等人(2005)和Tuell等人(2005)利用多次前向—单次后向散射模型 (Kopilevich 等,2005)模拟激光回波,然后通过匹配激光回波信号的模拟值和实测值,计算目标函数得到532 nm处的伪反射率信息和水质信息,再将计算得到的532 nm处的伪反射率数据和高光谱数据反演的反射率数据进行融合,最后进行地物分类,显著提高了分类精度。Pan等人(2016)融合LIDAR数据和高光谱数据后,其分类结果相比独立使用高光谱数据或LIDAR回波数据的分类结果都要好,虽然精度提高的不多,但是减小了分类误差。
在陆地地物分类中,可利用决策树融合ALB数据和高光谱数据(Reif 等,2012),如果能够消除水体散射和吸收的影响获取到水下地物准确的高光谱反射率信息,未来也可利用决策树融合两类数据,从而进行珊瑚礁类型的分类。
4.2 挖掘回波数据形状信息
挖掘全回波数据的形状信息也是目前升分类精度的有效方法。Collin等人(2008b)从水体激光回波数据中提取出12个量化的参数,如水面和底质反射峰的差异值、波峰的中心值、偏差、偏斜等,将这些参数和实地考察的水深水下地物等信息建立关系,然后建立分类树进行分类,分类精度达78.6%。另外再利用SHOALS系统能同时发射记录红外激光以及记录水体的拉曼散射信号,构建了植被指数,该指数和叶绿素浓度的相关性高达0.9323,利用该指数和水下不同植被之间的关系,最后水下植被的分类精度达到95.2%。Tulldahl和Wikström(2012)假设水底平坦和水质在较小范围内不变的环境条件下,利用水深信息计算水底坡度,然后从底质反射脉冲峰20%以上部分的带宽和面积中推导出与反射能量相关的参数,最后结合这些参数利用最大似然法对水下地物进行分类,相比另外一种只使用水底坡度和水深标准偏差辅助分类的方法,分类精度从82%提高到86%。Zavalas等人(2014)先利用ALB测量的水深数据计算水底的坡度、糙度、最大曲率等地形信息,然后对回波数据进行定标计算出532 nm处的相对反射率,再根据这些指标对水下物种的影响建立分类树,从而达到分类的目的,其中沙的分类精度是93%,混合褐藻的精度是74%,树冠藻类的精度是77%。
回波信号中底质反射峰的大小和形态等信息与底质的属性直接相关,如3.3节中所讨论的,多种环境因素影响着回波信号的形状,这就对回波数据的预处理精度有更高的要求。
5 结 论
虽然机载激光雷达测深系统成型已久,早期由于其在军事上应用的敏感性,使得全球只有少数几个国家或单位才拥有。如今机载激光雷达测深系统的商业化使得更多的科研机构能够拥有这类系统,但是商业化的数据处理软件不能够完全满足所有应用的需求,因此本文从激光雷达测深原理出发,对现有的水体全回波数据处理算法进行了介绍和归纳总结:
(1)激光脉冲入射角度和底质倾斜坡面会引起回波形状变形,目前针对此校正的算法较为成熟,但是针对复杂地形,如凸地形引起的形变校正研究还不足,需要进一步深入研究。
(2)水面和水底反射峰的搜索算法是水深计算的核心,部分从陆地回波数据处理中迁移过来的算法可直接应用到水体回波数据中,也有一些算法是针对水体回波特有性质开发的,每种算法各有优缺点。目前并不存在单一的算法适合所有的环境,必须针对特定的环境和条件,选择合适的算法,甚至需要综合使用多种算法提高精度。
(3)随着水陆一体化地形测量需求的增加,对极浅水的测量精度有待提高,主要需要解决水底反射峰和水面反射峰叠加的问题,未来极化雷达的发展可能提高测量厘米级别浅水的能力。目前ALB系统的应用主要在水体条件较好或底质反射率较高的区域,水体回波数据的形状相对来说比较有规律,信噪较高,数据处理相对较简单,但是随着ALB系统在混浊或弱底质反射率水体中应用的增加,激光在水中传播过程更加复杂,激光回波数据的信噪比降低,如何克服悬浮物较多和底质反射率较低对回波脉冲的影响,是目前急需解决的问题,这对数据处理的算法有更高的要求。
高光谱数据已经被用来进行水下地物分类和水深测量(Lee 等,1999),随着对ALB系统回波数据的深入认识和挖掘,ALB系统也慢慢突破测量水深的单一功能,对脉冲进行辐射定标,再利用数学模拟模型,能够从水体激光回波数据中提取出更多环境信息参数,如水体衰减系数、底质反射率和水深等,融合这些环境信息参数和高光谱影像数据能够有效地提高水下地物的分类精度,融合水体激光回波数据和高光谱数据能够提高水下地物的分类精度,也将是未来机载激光雷达系统扩展应用的方向,但是要进一步地在决策层面融合两类数据,还需要克服水体对被动遥感的影响。另外挖掘全回波数据的形状信息也是目前提升底质类型分类精度的有效方法,但同时对回波数据形状的校正有更高的要求。
国际上商业机载激光雷达测深系统已经体现了极强的性能和极高的经济效应。由于ALB系统的组成原理复杂,研发难度较大,国内对机载激光雷达测深系统的研究起步较晚(徐啟阳 等,2002),且受到激光器和光电探测器技术发展的限制,国内ALB系统的研发尚处于试验阶段中(叶修松,2010;程华,2015)。为此更期待成熟的国产机载激光雷达测深系统诞生,在中国岛礁、内陆河流、河口和海岸带的监测、保护和管理中发挥重要作用。
参考文献(References)
-
Abady L, Bailly J S, Baghdadi N, Pastol Y and Abdallah H. 2014. Assessment of quadrilateral fitting of the water column contribution in lidar waveforms on bathymetry estimates. IEEE Geoscience and Remote Sensing Letters, 11 (4): 813–817. [DOI: 10.1109/LGRS.2013.2279271]
-
Abdallah H, Baghdadi N, Bailly J S, Pastol Y and Fabre F. 2012. Wa-LiD: a new LiDAR simulator for waters. IEEE Geoscience and Remote Sensing Letters, 9 (4): 744–748. [DOI: 10.1109/LGRS.2011.2180506]
-
Abdallah H, Bailly J S, Baghdadi N N, Saint-Geours N and Fabre F. 2013. Potential of space-borne LiDAR sensors for global bathymetry in coastal and inland waters. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6 (1): 202–216. [DOI: 10.1109/JSTARS.2012.2209864]
-
Allouis T, Bailly J S, Pastol Y and Le Roux C. 2010. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surface Processes and Landforms, 35 (6): 640–650. [DOI: 10.1002/esp.1959]
-
Axelsson A. 2010. Rapid topographic and bathymetric reconnaissance using airborne lidar. Proceedings of SPIE - The International Society for Optical Engineering : 783503–783503-10.
-
Bailly J S, Le Coarer Y, Languille P, Stigermark C J and Allouis T. 2010. Geostatistical estimations of bathymetric LiDAR errors on rivers. Earth Surface Processes and Landforms, 35 (10): 1199–1210. [DOI: 10.1002/esp.1991]
-
Battaglia N F. 2010. Utility of Satellite LIDAR Waveform Data in Shallow Water. Monterey CA: Naval Postgraduate School
-
Bi S P, Bie J and Zhang Y. 2012. Application of airborne LiDAR to coastial topographic survey. Marine Geology Frontiers, 28 (11): 59–64. [DOI: 10.16028/j.1009-2722.2012.11.005] ( 毕世普, 别君, 张勇. 2012. 机载LiDAR在海岸带地形测量中的应用. 海洋地质前沿, 28 (11): 59–64. [DOI: 10.16028/j.1009-2722.2012.11.005] )
-
Bouhdaoui A, Bailly J S, Baghdadi N and Abady L. 2014. Modeling the water bottom geometry effect on peak time shifting in LiDAR bathymetric waveforms. IEEE Geoscience and Remote Sensing Letters, 11 (7): 1285–1289. [DOI: 10.1109/LGRS.2013.2292814]
-
Brown E D, Churnside J H, Collins R L, Veenstra T, Wilson J J and Abnett K. 2002. Remote sensing of capelin and other biological features in the North Pacific using lidar and video technology. ICES Journal of Marine Science, 59 (5): 1120–1130. [DOI: 10.1006/jmsc.2002.1282]
-
Chauve A, Mallet C, Bretar F, Durrieu S, Pierrot-Deseilligny M and Puech W. 2007. Processing full-waveform lidar data: modelling raw signals//International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 2007. Espoo, Finland: [s.n.]: 102–107
-
Cheng H. 2015. Study on the Signal Processing of Lidar. Chengdu: Graduate University of Chinese Academy of Sciences (The Institute of Optics and Electronics) (程华. 2015. 激光雷达回波信号处理技术研究. 成都: 中国科学院研究生院(光电技术研究所))
-
Collin A, Archambault P and Long B. 2008a. Mapping the shallow water seabed habitat with the SHOALS. IEEE Transactions on Geoscience and Remote Sensing, 46 (10): 2947–2955. [DOI: 10.1109/TGRS.2008.920020]
-
Collin A, Long B and Archambault P. 2008b. The use of the SHOALS waveforms to mapping habitat within the seamless benthoscape//Proceedings of IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2008. Boston, Massachusetts, USA: IEEE: 1144–1147 [DOI: 10.1109/IGARSS.2008.4779202]
-
Costa B M, Battista T A and Pittman S J. 2009. Comparative evaluation of airborne LiDAR and ship-based multibeam SoNAR bathymetry and intensity for mapping coral reef ecosystems. Remote Sensing of Environment, 113 (5): 1082–1100. [DOI: 10.1016/j.rse.2009.01.015]
-
Deng R R, He Z J and Chen X X. 2003. Model for water pollution remote sensing based on double scattering and its application on the Zhujiang River Estuary. Acta Oceanologica Sinica, 25 (6): 69–78. [DOI: 10.3321/j.issn:0253-4193.2003.06.009] ( 邓孺孺, 何执兼, 陈晓翔. 2003. 基于二次散射的水污染遥感模型及其在珠江口水域的应用. 海洋学报, 25 (6): 69–78. [DOI: 10.3321/j.issn:0253-4193.2003.06.009] )
-
Doneus M, Doneus N, Briese C, Pregesbauer M, Mandlburger G and Verhoeven G. 2012. Airborne laser bathymetry–detecting and recording submerged archaeological sites from the air. Journal of Archaeological Science, 40 (4): 2136–2151. [DOI: 10.1016/j.jas.2012.12.021]
-
Feigels V I. 1992. Lidars for oceanological research: criteria for comparison, main limitations, perspectives//Proceedings of the SPIE 1750, Ocean Optics XI. San Diego, CA, United States: SPIE, 1750: 473–484 [DOI: 10.1117/12.140676]
-
Fernandez-Diaz J C, Glennie C L, Carter W E, Shrestha R L, Sartori M P, Singhania A, Legleiter C J and Overstreet B T. 2014. Early results of simultaneous terrain and shallow water bathymetry mapping using a single-wavelength airborne lidar sensor. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 7 (2): 623–635.
-
Goodman J A, Purkis S J and Phinn S R. 2013. Coral Reef Remote Sensing. Dordrecht, Netherlands: Springer
-
Guenther G and Thomas R. 1983. System design and performance factors for airborne laser hydrography//Proceedings of Oceans’83. San Francisco, CA, USA: IEEE: 425–430 [DOI: 10.1109/OCEANS.1983.1152162]
-
Guenther G C, Cunningham A G, Larocque P E and Reid D J. 2000. Meeting the accuracy challenge in airborne lidar bathymetry.Proc. earsel Symp. Workshop on Lidar Remote Sensing of Land and Sea: (1), 1.
-
Guenther G C and Mesick H C. 1988. Analysis of airborne laser hydrography waveforms. Orlando Technical Symposium. International Society for Optics and Photonics, 925 : 232–241.
-
Guenther G C. 2007. Airborne lidar bathymetry//Maune D. Applications: The DEM Users Manual. 2nd ed. Bethesda: American Society for Photogrammetry and Remote Sensing
-
Harsdorf S and Reuter R. 2000. Stable deconvolution of noisy lidar signals//Proceedings of EARSeL-SIG-Workshop LIDAR. Dresden: [s.n.]
-
Hossain M S, Bujang J S, Zakaria M H and Hashim M. 2014. The application of remote sensing to seagrass ecosystems: an overview and future research prospects. International Journal of Remote Sensing, 36 (1): 61–114. [DOI: 10.1080/01431161.2014.990649]
-
Jacovitti G and Scarano G. 1993. Discrete time techniques for time delay estimation. IEEE Transactions on Signal Processing, 41 (2): 525–533. [DOI: 10.1109/78.193195]
-
Jutzi B and Stilla U. 2006. Range determination with waveform recording laser systems using a Wiener Filter. ISPRS Journal of Photogrammetry and Remote Sensing, 61 (2): 95–107. [DOI: 10.1016/j.isprsjprs.2006.09.001]
-
Kinzel P J, Legleiter C J and Nelson J M. 2013. Mapping river bathymetry with a small footprint green lidar: applications and challenges. JAWRA Journal of the American Water Resources Association, 49 (1): 183–204. [DOI: 10.1111/jawr.12008]
-
Kinzel P J, Wright C W, Nelson J M and Burman A R. 2007. Evaluation of an experimental LiDAR for surveying a shallow, braided, sand-bedded river. Journal of Hydraulic Engineering, 133 (7): 838–842. [DOI: 10.1061/(ASCE)0733-9429(2007)133:7(838)]
-
Klemas V. 2016. Beach profiling and LIDAR bathymetry: an overview with case studies. Journal of Coastal Research, 27 (6): 1019–1028. [DOI: 10.2112/JCOASTRES-D-11-00017.1]
-
Klonowski W M, Fearns P R C S and Lynch M J. 2007. Retrieving key benthic cover types and bathymetry from hyperspectral imagery. Journal of Applied Remote Sensing, 1 (1): 6656–6659.
-
Kopilevich Y I, Feygels V I, Tuell G H and Surkov A. 2005. Measurement of ocean water optical properties and seafloor reflectance with scanning hydrographic operational airborne lidar survey (SHOALS): I. Theoretical background//Proceedings of the SPIE 5885, Remote Sensing of the Coastal Oceanic Environment. San Diego, California, United States: SPIE, 5585: 58850D [DOI: 10.1117/12.618923]
-
Lee Z, Carder K L, Mobley C D, Steward R G and Patch J S. 1999. Hyperspectral remote sensing for shallow waters. 2. Deriving bottom depths and water properties by optimization. Applied Optics, 38 (18): 3831–3843. [DOI: 10.1364/AO.38.003831]
-
Lee Z, Casey B, Arnone R, Weidemann A, Parsons R, Montes M J, Gao B C, Goode W, Davis C and Dye J. 2007. Water and bottom properties of a coastal environment derived from Hyperion data measured from the EO-1 spacecraft platform. Journal of Applied Remote Sensing, 1 (1): 011502 [DOI: 10.1117/1.2822610]
-
Lee Z, Shang S L, Lin G, Chen J and Doxaran D. 2016. On the modeling of hyperspectral remote-sensing reflectance of high-sediment-load waters in the visible to shortwave-infrared domain. Applied Optics, 55 (7): 1738–1750. [DOI: 10.1364/AO.55.001738]
-
Legleiter C J, Overstreet B T, Glennie C L, Pan Z G, Fernandez-Diaz J C and Singhania A. 2016. Evaluating the capabilities of the CASI hyperspectral imaging system and Aquarius bathymetric LiDAR for measuring channel morphology in two distinct river environments. Earth Surface Processes and Landforms, 41 (3): 344–363. [DOI: 10.1002/esp.3794]
-
Li K, Tong X C, Zhang Y S, Ha C L and Shen E H. 2015. Inversion of diffuse attenuation coefficient spectral in the yellow sea/East China Sea and evaluation of laser bathymetric performance. Journal of Remote Sensing, 19 (5): 761–769. [DOI: 10.11834/jrs.20154276] ( 李凯, 童晓冲, 张永生, 哈长亮, 申二华. 2015. 黄海、东海区域漫衰减系数光谱遥感反演及激光测深性能评估. 遥感学报, 19 (5): 761–769. [DOI: 10.11834/jrs.20154276] )
-
Lucy L B. 1974. An iterative technique for the rectification of observed distributions. Astronomical Journal, 79 (6): 745–754.
-
Ma H C and Li Q. 2009. Modified EM algorithm and its application to the decomposition of laser scanning waveform data. Journal of Remote Sensing, 13 (1): 35–41. [DOI: 10.11834/jrs.20090104] ( 马洪超, 李奇. 2009. 改进的EM模型及其在激光雷达全波形数据分解中的应用. 遥感学报, 13 (1): 35–41. [DOI: 10.11834/jrs.20090104] )
-
Mallet C and Bretar F. 2009. Full-waveform topographic lidar: state-of-the-art. ISPRS Journal of Photogrammetry and Remote Sensing, 64 (1): 1–16. [DOI: 10.1016/j.isprsjprs.2008.09.007]
-
Mallet C, Lafarge F, Bretar F, Soergel U and Heipke C. 2013. Lidar waveform modeling using a marked point process. IEEE International Conference on Image Processing. IEEE, 2013 : 1713–1716.
-
Mandlburger G, Pfennigbauer M and Pfeifer N. 2013. Analyzing near water surface penetration in laser bathymetry-a case study at the River Pielach. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, Ⅱ-5/W2: 175–180 [DOI: 10.5194/isprsannals-Ⅱ-5-W2-175-2013]
-
Mitchell S, Thayer J P and Hayman M. 2010. Polarization lidar for shallow water depth measurement. Applied Optics, 49 (36): 6995–7000. [DOI: 10.1364/AO.49.006995]
-
Mobley C D, Zhang H and Voss K J. 2003. Effects of optically shallow bottoms on upwelling radiances: bidirectional reflectance distribution function effects. Limnology and Oceanography, 48 (1part2): 337–345. [DOI: 10.4319/lo.2003.48.1_part_2.0337]
-
Mobley C D. 1994. Light and Water: Radiative Transfer in Natural Waters. San Diego: Academic Press
-
Muirhead K and Cracknell A P. 1986. Airborne lidar bathymetry. International Journal of Remote Sensing, 7 (5): 597–614. [DOI: 10.1080/01431168608954714]
-
Nayegandhi A, Brock J C and Wright C W. 2009. Small-footprint, waveform-resolving lidar estimation of submerged and sub-canopy topography in coastal environments. International Journal of Remote Sensing, 30 (4): 861–878. [DOI: 10.1080/01431160802395227]
-
Nordin L. 2006. Analysis of Waveform Data from Airborne Laser Scanner Systems. North Province: Luleå University of Technology
-
Pan Z G, Glennie C, Hartzell P, Fernandez-Diaz J, Legleiter C and Overstreet B. 2015. Performance assessment of high resolution airborne full waveform lidar for shallow river bathymetry. Remote Sensing, 7 (5): 5133–5159. [DOI: 10.3390/rs70505133]
-
Pan Z G, Glennie C L, Fernandez-Diaz J C, Legleiter C J and Overstreet B. 2016. Fusion of LiDAR orthowaveforms and hyperspectral imagery for shallow river bathymetry and turbidity estimation. IEEE Transactions on Geoscience and Remote Sensing, 54 (7): 4165–4177. [DOI: 10.1109/TGRS.2016.2538089]
-
Park J Y, Ramnath V and Tuell G. 2014. Using lidar waveforms to detect environmental hazards through visualization of the water column. Oceans IEEE, 43: 1–5.
-
Parker H and Sinclair M. 2012. The successful application of Airborne LiDAR Bathymetry surveys using latest technology//Proceedings of Yeosu OCEANS, 2012. Yeosu: IEEE: 1–4 [DOI: 10.1109/OCEANS-Yeosu.2012.6263588]
-
Parrish C E and Nowak R D. 2009. Improved approach to LIDAR airport obstruction surveying using full-waveform data. Journal of Surveying Engineering, 135 (2): 72–82. [DOI: 10.1061/(ASCE)0733-9453(2009)135:2(72)]
-
Parrish C E, Jeong I, Nowak R D and Smith R B. 2011. Empirical comparison of full-waveform lidar algorithms. Photogrammetric Engineering and Remote Sensing, 77 (8): 825–838. [DOI: 10.14358/PERS.77.8.825]
-
Pe’eri S and Philpot W. 2007. Increasing the existence of very shallow-water LIDAR measurements using the red-channel waveforms. IEEE Transactions on Geoscience and Remote Sensing, 45(5): 1217–1223 [DOI: 10.1109/TGRS.2007.894584]
-
Persson Å, Söderman U, Töpel J and Ahlberg S. 2005. Visualization and analysis of full-waveform airborne laser scanner data. Proceedings of SPIE-The International Society for Optical Engineering, 36(3), 103–108.
-
Pfennigbauer M, Ullrich A, Steinbacher and Aufleger M. 2011. High-resolution hydrographic airborne laser scanner for surveying inland waters and shallow coastal zones//Proceedings of the SPIE 8037, Laser Radar Technology and Applications XVI. Orlando, Florida, United States: SPIE, 8037: 803706 [DOI: 10.1117/12.883910]
-
Pruksch M and Fleischmann F. 1998. Positive iterative deconvolution in comparison to richardson-lucy like algorithms//Albrecht R, Hook R N and Bushouse H A, eds. Astronomical Data Analysis Software and Systems VⅡ: ASP Conference Series. [s.l.]: Astronomical Society of the Pacific, 145 : 496–499.
-
Reif M K, Macon C L and Wozencraft J M. 2012. Post-katrina land-cover, elevation, and volume change assessment along the south shore of lake pontchartrain, louisiana, U.S.A. Journal of Coastal Research, 62 : 30–39. [DOI: 10.2112/SI_62_4]
-
Roncat A, Wagner W, Melzer T and Ullrich A. 2008. Echo detection and localization in full-waveform airborne laser scanner data using the averaged square difference function estimator. Photogrammetric Journal of Finland, 21 (1): 62–75.
-
Steinvall O K, Koppari K R, Lejdebrink U, Winell J, Nilsson M, Ellsen R and Gjellan E. 1996. Depth-sounding lidar: performance and models. Proceedings of the SPIE 2748, Laser Radar Technology and Applications. Orlando, FL: SPIE, 2748: 18–38 [DOI: 10.1117/12.243551]
-
Tuell G, Barbor K and Wozencraft J. 2010. Overview of the coastal zone mapping and imaging lidar (CZMIL): a new multisensor airborne mapping system for the U.S. army corps of engineers//Proceedings of the SPIE 7695, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVI. Orlando, Florida, United States: SPIE, 7695: 76950R [DOI: 10.1117/12.851905]
-
Tuell G H, Feygels V, Kopilevich Y, Weidemann A D, Cunningham A G, Mani R, Podoba V, Ramnath V, Park J Y and Aitken J. 2005. Measurement of ocean water optical properties and seafloor reflectance with scanning hydrographic operational airborne lidar survey (SHOALS): Ⅱ. Practical results and comparison with independent data//Proceedings of the SPIE 5885, Remote Sensing of the Coastal Oceanic Environment. San Diego, California, United States: SPIE, 5885: 58850E [DOI: 10.1117/12.619215]
-
Tuell G H and Park J Y. 2004. Use of SHOALS bottom reflectance images to constrain the inversion of a hyperspectral radiative transfer model//Proceedings of the SPIE 5412, Laser Radar Technology and Applications IX. Orlando, FL: SPIE, 185–193 [DOI: 10.1117/12.564929]
-
Tulldahl H M and Wikström S A. 2012. Classification of aquatic macrovegetation and substrates with airborne lidar. Remote Sensing of Environment, 121 : 347–357. [DOI: 10.1016/j.rse.2012.02.004]
-
Wagner W, Roncat A, Melzer T and Ullrich A. 2007. Waveform analysis techniques in airborne laser scanning. Swiss Federal Institute of Technology Zürich, 3 (1): 602–605.
-
Wagner W, Ullrich A, Ducic V, Melzer T and Studnicka N. 2006. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS Journal of Photogrammetry and Remote Sensing, 60 (2): 100–112. [DOI: 10.1016/j.isprsjprs.2005.12.001]
-
Wang A P, Zhang G Y and Liu F. 2009. Research and application of EM algorithm. Computer Technology and Development, 19 (9): 108–110. [DOI: 10.3969/j.issn.1673-629X.2009.09.030] ( 王爱平, 张功营, 刘方. 2009. EM算法研究与应用. 计算机技术与发展, 19 (9): 108–110. [DOI: 10.3969/j.issn.1673-629X.2009.09.030] )
-
Wang C K and Philpot W D. 2007. Using airborne bathymetric lidar to detect bottom type variation in shallow waters. Remote Sensing of Environment, 106 (1): 123–135. [DOI: 10.1016/j.rse.2006.08.003]
-
Wang C S, Li Q Q, Liu Y X, Wu G F, Liu P and Ding X L. 2015. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS Journal of Photogrammetry and Remote Sensing, 101 : 22–35. [DOI: 10.1016/j.isprsjprs.2014.11.005]
-
Wong H and Antoniou A. 1991. Characterization and decomposition of waveforms for Larsen 500 airborne system. IEEE Transactions on Geoscience and Remote Sensing, 29 (6): 912–921. [DOI: 10.1109/36.101370]
-
Wozencraft J M and Park J Y. 2013. Integrated LiDAR and hyperspectral//Goodman J, Purkis S and Phinn S, eds. Coral Reef Remote Sensing. Dordrecht, Netherlands: Springer [DOI: 10.1007/978-90-481-9292-2_7]
-
Wozencraft J M, Tuell G H and Philpot W D. 2003. Fusion of hyperspectral and bathymetric laser data in kaneohe bay, hawaii. Proc Spie, 5093 : 517–527. [DOI: 10.1117/12.488438]
-
Wu J Y, van Aardt J A N and Asner G P. 2011. A comparison of signal deconvolution algorithms based on small-footprint LiDAR waveform simulation. IEEE Transactions on Geoscience and Remote Sensing, 49 (6): 2402–2414. [DOI: 10.1109/TGRS.2010.2103080]
-
Xu Q Y, Yang K T, Wang X B and Xu D S. 2002. Blue-Green Lidar Ocean Survey. Beijing: National Defense Industry Press (徐啟阳, 杨坤涛, 王新兵, 许德胜. 2002. 蓝绿激光雷达海洋探测. 北京: 国防工业出版社)
-
Ye X S. 2010. Research on Principle and Data Processing Methods of Airborne Laser Bathymetric Technique. Zhengzhou: PLA Information Engineering University (叶修松. 2010. 机载激光水深探测技术基础及数据处理方法研究. 郑州: 解放军信息工程大学)
-
Zavalas R, Ierodiaconou D, Ryan D, Rattray A and Monk J. 2014. Habitat classification of temperate marine macroalgal communities using bathymetric LiDAR. Remote Sensing, 6 (3): 2154–2175. [DOI: 10.3390/rs6032154]
-
Zhou J P, Zhang A W and Wang S M. 2013. Processing and application of small-footpring full-waveform airborne LiDAR data. Bulletin of Surveying and Mapping, 24 (1): 10–13, 24. ( 周静平, 张爱武, 王书民. 2013. 机载小光斑全波形LiDAR数据处理及应用. 测绘通报, 24 (1): 10–13, 24. )
-
Zhou L. 2013. Marine Geodesy. Beijing: Science Press (周立. 2013. 海洋测量学. 北京: 科学出版社)
-
Zou M Y. 2001. Deconvolution and Signal Recovery. Beijing: National Defense Industry Press (邹谋炎. 2001. 反卷积和信号复原. 北京: 国防工业出版社)


