


|
收稿日期: 2016-06-30
基金项目: 国家科技支撑计划项目(编号:2013BAJ11B02);重庆市社会科学规划项目(编号:2016YBGL131)
第一作者简介: 张甜(1989— ),博士研究生,研究方向为生态遥感与国土规划。E-mail:jianyirong614@gmail.com
通讯作者简介: 廖和平(1964— ),教授,研究方向为土地规划与管理。E-mail:liaohp@swu.edu.cn
中图分类号: TP702
文献标识码: A
|
摘要
中国西南丘陵常态山和喀斯特山交错分布,遥感影像普遍存在山体阴影,分布零散且无规律,基于DEM的地形校正模型(C校正等)虽然算法成熟、易于操作,但在复杂地形区存在误差。引入基于相似像元包络线的阴影校正方法(CR校正),按照阴影提取、包络线去除、相似像元寻找和阴影亮度重建的步骤,采用西南丘陵地区Landsat 8 OLI影像进行验证实验。结果表明:CR校正后,阴影区的视觉特征与邻近非阴影区趋于一致,阴影像元亮度有明显提升;校正后影像主要波段标准差减小,与非阴影区参考光谱的相对均方根误差在2.919%以内,最低仅为0.516%;自动分类精度从43.59%提高到61.57%,CR校正有效提高了有阴影的丘陵地区遥感影像质量。
关键词
阴影校正, 包络线去除, 信息增强, Landsat 8 OLI影像, 西南丘陵
Abstract
Shadow of the remote sensing image is widespread in China southwest hilly area, which has affected the effects of automatic recognition of image computer and quantitative analysis. Topographic correction methods, which are widely used to adjust for differences in solar incidence angles, can partly alleviate the impacts of shadows. But the model based on DEM data has limitations and errors in application, resulting to the scattered and discontinuous images of the terrain correction. In order to overcome the shortcomings of the topographic correction models based on DEM and improve the quality of remote sensing image of southwest hills, the article introduced a new shadow correction methods based on the similar spectral information after continuum removed. The advantage of the method is that it no longer depend on DEM and semi-empirical estimation value, which can maximize the computer automatic identification and the independent access for parameters. Throughout these shadow correction methods, they are based on weak information in the shadow area, and the shadow correction is achieved by establishing a relationship between shadow and non-shadow. As to shadow pixel and non-shadow pixel with the same surface land cover types, their spectral curve is similar and only brightness (continuum information) is different. In order to establish relationship of spectral statistic feature between shadow pixel and non-shadow pixel, the spectral information is recovered by the similar pixel of shadow pixel and by the principle of using surface features spectrum envelope line to remove the continuum line. The article introduced a new shadow correction methods based on the similar spectral information after continuum removed, and experiment it on Landsat 8 OLI image by shadow extraction, continuum removing, searching for similar pixel, shadow information restoration. And the calibration accuracy was tested by visual evaluation, statistical analysis, comparative verification and automatic classification. By comparing the images of C-method correction and CR-method correction, the visual feature of the two images tend to be flat, and the image details of shadow area tend to be obvious. After CR-method shadow correction, the pixel brightness value of shadow area gets a more complete compensation, and the image brightness converges with the shadow area, and it makes the shadow area visual characteristics more consistent with the near shadow area. At the same time, the standard deviation of the image tend to drop after CR-method correction, making the pixel brightness value of the slopes closer. CR-method is better than C-method for terrain shadow elimination and slope and luminance values of homogenization, which relative root mean square error(rRMSE) of sample point in per land use cover type is within 2.919% compared with unshaded pixels, and the minimum is only 0.516%. the automatic classification accuracy of CR-method correction, calculating the number of right and wrong pixels, has increased from 43.59% to 61.57%. The experiment of CR-method shadow correction in complex hilly terrain region has achieved good effect, and has improved the quality of remote sensing image with mountain shadow.
Key words
shadow correction, continuum removal, Information enhancement, Landsat 8 OLI image, China Southwest Hilly region
1 引 言
中国西南丘陵地区的遥感影像普遍存在大量山体阴影,分布零散且无规律,影响了自动解译效果和各种定量分析,因此丘陵地区遥感影像的阴影去除一直是技术难题(虢建宏 等,2006)。
阴影在遥感影像数据上表现为像元亮度值(DN值)偏低,信息量相对较少,为了降低阴影对遥感影像质量的影响,国内外发展了多种校正模型,主要包括早期比较理想的Teillet等人(1982)回归校正、Minnaert等人(2008)校正、Cosine校正,以及随后出现的改进余弦校正(C校正)模型、Cosine-C模型、Cosine-b模型、SCS模型、SCS +C模型等(Gao和Zhang,2009;穆悦 等,2014;Yamazaki 等,2009),这些地形校正模型都是依托于数字高程模型(DEM)数据,并取得了一定的校正精度,其中余弦校正(C校正)模型,算法成熟,易于操作且精度较高(Richter 等,2009),其基本思想是:对于任意波段影像的像元DN值和其对应的太阳入射角余弦值都遵循线性关系,因此可选择C校正做对比研究。另外,城市高分影像的阴影校正算法也取得了一些成果,经典方法有直方图匹配法,伽玛校正、均值方差变换法等(Chen 等,2007;Shahtahmassebi 等,2013;温兆飞 等,2016),这些阴影校正方法的核心思想都是基于阴影区像元保留的微弱信息,建立阴影像元和非阴影像元之间的某种特征关系而实现的。
然而基于DEM数据的地形校正模型有两个局限性:一方面,校正精度取决于DEM的质量、完整性和空间分辨率,以及遥感影像与DEM的配准误差,如目前广泛使用的SRTM DEM数据分辨率为90 m,而Landsat TM/ETM影像分辨率为30 m,校正中的重采样错误,可能导致校正后图像不连续,而高精度DEM数据目前并不能全部公开获取;另一方面,太阳入射角接近90°的像元,容易出现过度校正现象,不适合在复杂地形区使用,如中国西南喀斯特山和常态山交错分布的丘陵地区,地表异质性明显,覆被类型复杂,误差更为显著(杨奇勇 等,2012)。同时,基于阴影像元和非阴影像元之间特征关系的校正模型,有许多参数是通过半经验模型推算获取(Liu和Yamazaki,2012),也给阴影校正又带来一定的不确定性。
因此,为降低DEM数据和半经验参数给地形校正带来的误差,提高有阴影的丘陵地区遥感影像质量,引入一种基于相似像元光谱包络线的阴影校正方法(Zhou 等,2014),充分利用阴影和非阴影像元光谱的相关性,通过替换包络线修复阴影区亮度,摆脱了DEM数据依赖,最大化实现计算机自动识别和参数独立获取。本文随机截取中国西南丘陵地区Landsat 8 OLI多光谱影像试验,按照阴影提取,去除包络线,寻找相似像元和阴影信息重建的步骤在ENVI IDL软件中操作,并通过视觉评价、统计分析、对比验证和自动分类对试验结果进行校正精度检验。
2 研究方法
2.1 基本原理
阴影校正的最终目的是使阴影像元与非阴影像元的亮度信息尽可能保持一致。基于地物光谱去除包络信息后曲线特征突出(白继伟 等,2003),而地理距离接近,且地表覆盖类型相同的像元光谱形状应相同或极其相似,通过去除包络线后的光谱寻找相似像元,再以相似非阴影像元的亮度替换阴影像元的亮度,实现校正目的。其主要原理是基于式(1)实现的。
| $DN(b) = C(b) \times CR(b)$ | (1) |
式中,DN(b)表示 目标阴影像元在波段b的DN值,C(b)表示阴影像元在波段b的包络线值,CR(b)表示目标阴影像元在波段b的包络线去除值。
去除包络线法(CR法)地形校正的核心内容包括:阴影提取,去除包络线,寻找相似像元和阴影亮度信息重建。
2.2 去除包络线法(CR法)地形校正过程
2.2.1 阴影提取
提取阴影区是为后续步骤提供掩膜信息,本方法只针对提取阴影及其缓冲区操作,避免影响非阴影区的光谱特征。阴影像元的特征之一就是信息弱,表现在影像数据上为亮度值低,因此提取低于一定亮度阈值的区域即为阴影区。首先通过缨帽变换得到亮度波段,之后以多波段遥感影像为输入,以亮度波段为主要权重波段,对影像进行分割,最后计算亮度最佳分割阈值,并构建规则集,实现阴影最优提取。图像分割过程需要确定分割对象的同质性和异质性(Espindola 等,2006;刘兆祎 等,2014),同质性可使用加权方差式(2)计算
| $V = \sum\limits_{i = 1}^n {{a_i}{v_i}} /\sum\limits_{i = 1}^n {{a_i}} $ | (2) |
式中,V表示分割对象同质性,n表示分割块数,Vi表示第i块分割图像波谱值的方差,ai表示第i块分割图像的面积,


分割异质性可用空间自相关测量式(3)计算
| $I = \frac{{n\displaystyle\sum\limits_{i = 1}^n {\displaystyle\sum\limits_{j = 1}^n {{w_{ij}}({X_i} - \bar X)({X_j} - \bar X)} } }}{{\displaystyle\sum\limits_{i = 1}^n {{{({X_i} - \bar X)}^2}} \left( {\displaystyle\sum\limits_{i \ne j} {\sum {{w_{ij}}} } } \right)}}$ | (3) |
式中,I表示分割对象异质性,n表示分割总块数,X表示图像的平均光谱值,Xi和Xj表示分割块i和分割块j的平均光谱值。另外,如果分割块i和分割块j是邻近像元,则Wij= 1,否则Wij=0。
亮度提取最佳分割阈值由灰度图像最大类间方差法得到(谭志存和鲁瑞华,2009),计算如式(4)
| ${\sigma ^2} = {P_A}{\left( {{\mu _A} - {\mu _T}} \right)^2} + {P_B}{\left( {{\mu _B} - {\mu _T}} \right)^2}$ | (4) |
式中,PA和PB表示A和B两类像元出现的概率,μA和μB表示A、B两类像元的灰度均值,μT是整个影像的灰度均值,σ2表示A、B两类像元的类间方差。使类间方差最大时,两类像元的差别分割节点,就是亮度的最佳分割阈值。
另外,植被覆盖指数(NDVI)虽然对亮度差不敏感,但有助于分辨有无植被覆盖,在阴影提取规则中,能够有效剔除水体干扰。阴影一般按照特定的形状分布,提取规则中加入形状限定条件,也可提高阴影提取精度(段光耀 等,2014)。最后目视修正阴影区范围,避免对亮度低的非阴影像元错判,并通过随机检验,验证提取精度。
2.2.2 包络线去除
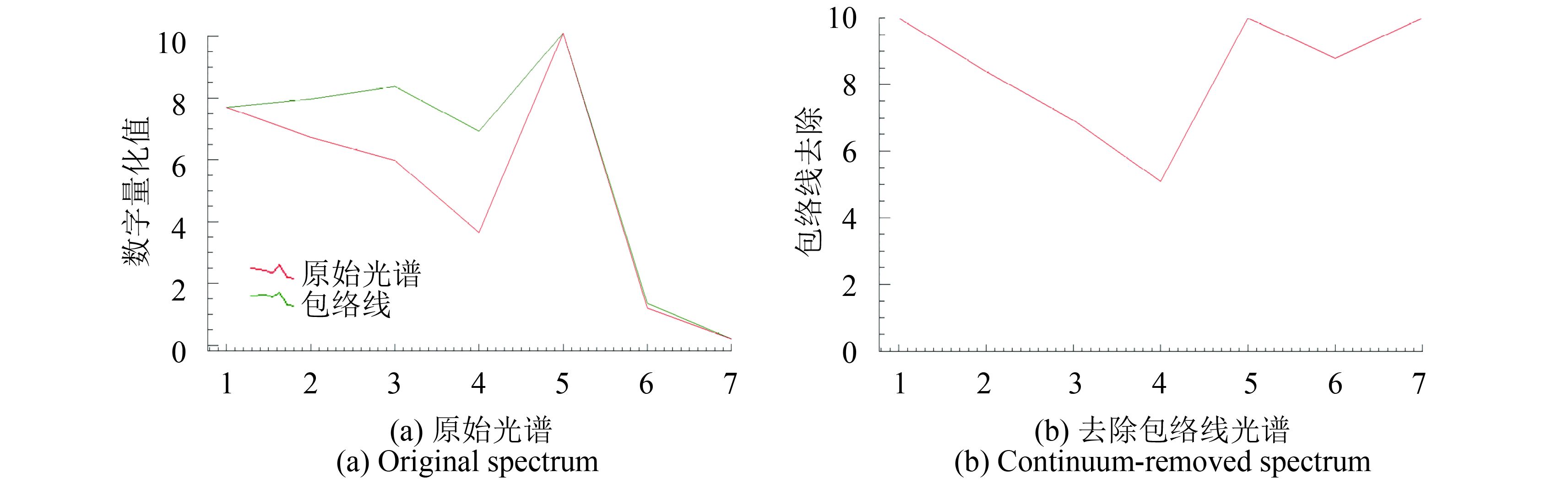
遥感影像中的阴影像元虽然比非阴影像元亮度低,但如果不考虑混合像元的存在,地理距离接近的相同土地覆盖类型的像元应具有相同或极其类似的光谱形状。为了建立阴影区和非阴影区像元之间光谱形状信息更精确的统计关系,引入包络线去除算法,对光谱曲线进行处理,将反射率归一化,突出光谱的吸收和反射特征。包络线去除有利于与其他光谱曲线进行特征数值的比较,从而便于定量寻找相似像元。“包络线”通常指光谱曲线上凸出的峰值点的连接线,并使折线在峰值点上的外角大于180°,原始光谱曲线上的值除以包络线上对应的值,即为光谱去包络(Mielke 等,2015),其计算方法如式(5)
| $CR = S/C$ | (5) |
式中,CR表示包络线去除结果,S表示初始波谱,C表示包络曲线,即原始光谱可以分为两个部分:包络线信息和形状信息,形状信息有助于寻找非阴影区域的相似像元,包络线信息则可用于恢复阴影像元的亮度值。
2.2.3 寻找相似像元
理论上,同一影像上,地理距离相近且波谱特征相同或极其类似的像元可认为是同种地物(Chen 等,2011)。如图3所示,其中图3(a)是遥感影像,图3(c)和图3(d)中分别是影像中点A和点B的反射特征曲线和包络线去除曲线。经过点A和点B的光谱对比可以看出,二点包络线去除后具有极其相似的光谱曲线,因此阴影区内点A和非阴影区点B是相似像元,可用于替换亮度信息。
由于空间距离短的像元间更容易具有相似的光谱特征,因此在图3(c)阴影周围缓冲区内搜寻相似像元,去包络后光谱均方根偏差式(6)满足式(7)的条件,就被选为阴影像元的相似像元(Chen 等,2011)。
| ${\rm{RMS}}{{\rm{D}}_i} = \sqrt {\sum\limits_{b = 1}^n {{{\left( {CR\left( {{x_i},{y_i},b} \right) - CR\left( {x,y,b} \right)} \right)}^2}} /n} $ | (6) |
式中,CR(xi,yi,b)表示坐落在(xi,yi)位置的非阴影像元b波段的包络线去除值,CR(x,y,b)表示坐落在(x,y)位置的阴影像元b波段的包络线去除值。n是光谱波段的数量。RMSD值越大代表光谱形状差异显著,RMSD值越小表示两像元之间的相似度高。
| ${\rm{RMS}}{{\rm{D}}_i} \leqslant \frac{{\left[ {\displaystyle\sum\limits_{b = 1}^n {\sigma \left( b \right) \times 2} /m} \right]}}{n}$ | (7) |
式中,σ(b)是原始影像在波段b包络线去除值的标准差,m是土地覆盖类型数目,2是因子正负标准差范围的平均值。理论上,每种土地覆盖类型的光谱值应按照高斯正态分布,像元标准差在平均值的正负范围内即为同一分类,如果m的估计值大于实际值,则相似认定条件更严格。另外,考虑到混合像元和随机噪声的存在,相似像元样本的数量太小,可能会导致预测偏差很大,在地表异质性显著的丘陵地区,相似像元的样本大小N如果不能满足最低要求,可适当扩大搜索范围寻找相似像元,以确保统计约束的可靠性。

2.2.4 阴影信息重建
利用目标阴影像元的光谱形状,和相似非阴影像元提供的亮度信息,可重建阴影像元。阴影像元包络线C可以用N个非阴影相似像元的加权平均C值替换,从而与周围相似像元亮度水平近似一致,如式(8)所示:
| $D{N_{re}}\left( b \right) = {C_{wavg}}\left( b \right) \times CR\left( b \right)$ | (8) |
式中,DNre(b)表示目标阴影像元在波段b重建的DN值,CR(b)表示目标阴影像元在波段b的包络线去除值,Cwavg(b)表示N个相似非阴影像元在波段b的包络线加权平均值,如式(9)所示:
| ${C_{wavg}}\left( b \right) = \sum\limits_{j = 1}^N {{W_j}} {C_j}\left( b \right)$ | (9) |
相似像元j的贡献权重Wj可由光谱距离RMSDj和地理距离Dj的乘积获得,如式(10)所示:
| ${W_j} = \frac{{1/\left( {D_j^* \times {\rm{RMSD}}_j^*} \right)}}{{\displaystyle\sum\limits_{j = 1}^N {1/\left( {D_j^* \times {\rm{RMSD}}_j^*} \right)} }}$ | (10) |
式中,地理距离Dj是相似像元位置(xj,yj)和目标像元位置(x,y)之间的欧几里得距离式(11),并按照式(12)标准化处理,
| ${D_j} = \sqrt {{{\left( {{x_j} - x} \right)}^2} + {{\left( {{y_j} - y} \right)}^2}} $ | (11) |
| $D_j^* = \frac{{{D_j} - {D_{\min }}}}{{{D_{\max }} - {D_{\min }}}} + 1$ | (12) |
光谱距离式(6)按照式(13)标准化处理:
| ${\rm{RMSD}}_j^* = \frac{{{\rm{RMS}}{{\rm{D}}_j} - {\rm{RMS}}{{\rm{D}}_{\min }}}}{{{\rm{RMS}}{{\rm{D}}_{\max }} - {\rm{RMS}}{{\rm{D}}_{\min }}}} + 1$ | (13) |
式中,RMSDmin和RMSDmax表示均方根偏差的最大值和最小值,常量1是定义这两个距离相对重要性的一个偏移量,当滞后距离为1个像元时,最能准确描述邻近像元间光谱亮度差异(Wen 等,2015)。
2.3 精度评价
影像校正后的基本统计信息,可客观评价影像校正的质量。由于阴影区与邻近非阴影区同一地物应具有相似DN值,校正效果越好,阴阳坡像元的亮度值越接近,影像标准差就更小。
另外,验证去除包络线法(CR法)有效性必须对校正后阴影区光谱与其真实光谱进行比较,但真实光谱无法确定,只能验证阴影区与非阴影区同一地物对应的光谱偏差。同种覆被类型像元在阴影重建后,阴影像元值应与邻近非阴影像元值统计相关,相对均方根误差(rRMSD)可用来定量评价某种覆被类型像元的相关性(温兆飞 等,2016)。以研究区的土地变更调查数据作为真实土地覆盖类型确定依据,随机选择非阴影区每种土地覆盖类型的20个纯净像元作为参考光谱,和校正后同种土地覆盖类型的阴影像元进行比较,计算校正后光谱和参考光谱的相对均方根误差,如式(14)所示:
| ${\rm{rRMSE}} = \sqrt {\sum\limits_{i = 1}^N {{{(L_{{\rm{shw}}}^i - {L_{{\rm{ref}}}})}^2}} /NL_{{\rm{ref}}}^2} $ | (14) |
式中,N表示校正后阴影区某种覆盖类型中随机选择像元个数,Lshwi表示第i个阴影像元值,Lref表示该种土地覆盖类型参考光谱的平均值。
3 实验结果
3.1 数据来源
本文使用Landsat 8 OLI多光谱影像和DEM数据从中国科学院地理空间数据云([2016-06-30]http://www. gscloud.cn/sources)获得。影像获取日期为2015年04月28日,轨道号为path127/row40,太阳高度角为64.879°,方位角为121.144°,原始影像像元为DN值(图4)。研究区影像中心位置为108°6′41.47″E,29°31′41.29″N,空间分辨率为30 m,本研究涉及波段分别为:Band3绿光(0.525—0.600 μm)、Band4红光(0.630—0.680 μm)、Band5近红外(0.845—0.885 μm)、Band6短波红外(1.560—1.660 μm)。DEM数据采用ASTER GDEM V1数据,空间分辨率30 m,景号为ASTGTM_N29E108,研究区海拔最高1492 m,最低699 m,相对高差793 m(图5);2维散点拟合的参考影像采用阴影较少的同带号2015年5月16日影像;真实的地表覆被类型以2015年研究区的土地变更调查数据(国土资源和房屋管理局提供)确定。


研究区位于重庆东南的武隆县和彭水县交界地区,地处武陵山与大娄山结合部褶皱带,属于中国南方喀斯特高原丘陵地区,由于深度溶蚀形成的深切槽谷交错出现,研究区呈现常态山体和喀斯特山体混交,土地覆被主要包括林地、耕地、农村居民点、河流和农村道路。
3.2 参数设置
基于实验影像数据的处理级别,需要进行辐射定标,但大气校正会明显降低阴影区植被像元在蓝、绿波段数值,可能会影响寻找相似像元的精度(Zhou 等,2014),因此实验数据只做辐射定标不做大气校正,利用专业遥感图像处理软件ENVI 5.1完成,辐射定标参数通过影像头文件获得。
阴影提取可在ENVI软件的FX模块下完成,并与基于DEM生成的山体阴影进行了对比检验。实验中将光谱因子和形状因子分别设为0.9和0.1,强调光谱的重要性;紧密度因子和光滑度因子设为0.3和0.7;依据同质性因子和异质性因子计算得最优尺度值为53,最后利用人工目视解译方法,对该阴影提取结果作进一步修正。视觉检验阴影的提取结果基本覆盖了影像亮度值低的区域,并通过ARCGIS软件Create Random Points工具在提取阴影随机生成了300个点与DEM阴影对比检验(图6),结果显示有效点277个,吻合256个,替代误差2.5%和遗漏误差为8.3%,准确率超过89.3%。

C校正利用Topographical Correction工具完成,包络线去除利用Continuum Removal工具完成,定量寻找相似像元和阴影重建过程,可通过IDL程序自动实现,作为阈值参数的均方根误差(RMSD),可以根据研究区自动选择和调整。根据对比实验,设置土地覆盖类型m=5,相似像元个数N=20。
3.3 实验结果
3.3.1 视觉评价

影像色彩、纹理、色调、对比度等视觉特征是阴影校正结果定性评价的重要指标,若阴影校正效果较好,则阴影区的视觉特征应与邻近非阴影区具有较好一致性(Chen 等,2011)。研究区位于常态山和喀斯特山交错地带,原始影像阴影条带状和椭圆状兼有,阴影区内植被为主,因此假彩色合成视觉效果更佳,如图7(a)中标号1—3所示。
通过对比假彩色合成的C校正和CR校正后图像,两种地形校正后视觉特征都趋于平坦,阴影区图像细节也趋于明显。C校正在影像中央山脊和山谷地带存在过度校正(图7(b)中标号5)和校正不足(图7(b)中标号6)的情况,这可能是DEM数据投射角度计算错误造成;CR法阴影校正后,阴影区像元亮度值得到了更平滑的补偿,图像亮度与非阴影区趋于一致(图7(c)中标号7)。通过对校正影像局部细节观察,CR法阴影校正后比C校正在阴影区域内色彩、纹理更丰富(图7(c)中标号8),阴影区与非阴影区边缘过渡更加平滑自然(图7(c)中标号9)。事实上,由于丘陵地区30 m分辨率的DEM数据先天不足,C校正模型在常态山体和喀斯特山体混交地区,校正不足和过度校正现象交错出现,效果差强人意,给影像目视判读带来了新困难,CR法虽然也不尽如人意,但一定程度使山体阳坡和阴坡的视觉特征更一致。
3.3.2 对比评价
阴影校正的目的是补充像元亮度,因此校正后各波段的DN值应该比未校正影像有提升。图8显示的是原始影像,C校正影像和CR法校正影像在同一个阴影像元的光谱比较。CR校正和C校正后的光谱DN值在每个波段都有所提高,但CR法在红光波段和近红外波段提升尤其显著,这是一个植被特征像元光谱。

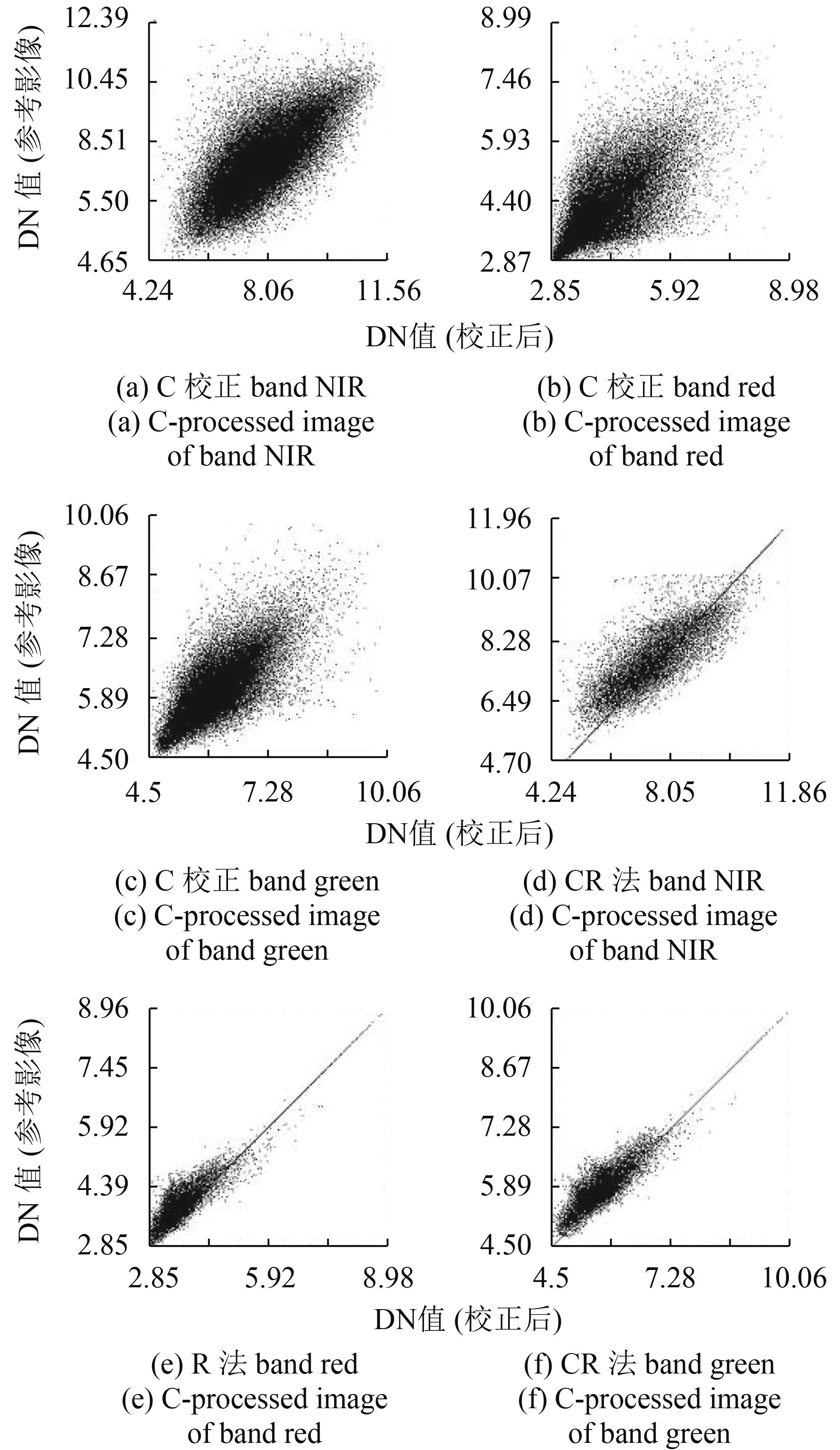
遥感图像的2维散点图是表达两个波段组合光谱空间结构信息的最佳图示方式,通过拟合C校正和CR法校正后影像在近红外、红光和绿光波段(假彩色合成波段)与参考影像(5月16日)相应波段的2维散点图(图9),可看出CR校正,光谱空间结构拟合关系更优。
3.3.3 定量评价
影像的基本统计信息可以进一步对影像校正质量进行定量评价,表1列出了影像校正后的最大值、最小值、均值及标准差。地形校正的效果越好,阴阳坡的像元的亮度值越接近,阴阳坡趋于一致的趋势更加明显,影像的标准差就更小。从表2中可以看出,C校正和CR校正后,影像标准差基本呈下降趋势,说明这两种方法都使阴阳坡的像元亮度值更加接近,实现了地形校正目的。从标准差减小的幅度来看,CR法校正后影像标准差减小幅度更大,尤其是在近红外波段和短波红外表现最好,蓝光波段和绿光波段的提升是由于恢复的无植被覆盖像元造成的,可见CR法对植被覆盖区的地形阴影的消除、阴阳坡亮度值的均一化效果更出色。另外,C校正后影像最大值突出,说明有过度校正存在。
表 1 原始影像与校正后影像基本统计表
Table 1 The statistics values per band after shadow restoration of C and CR method
| 波段 | 影像 | 最小值 | 最大值 | 均值 | 标准差 |
| Band 1 | a | 7.022 | 11.006 | 8.011 | 0.473 |
| b | 7.033 | 11.011 | 8.013 | 0.474 | |
| c | 7.214 | 11.006 | 8.149 | 0.534 | |
| Band 2 | a | 5.943 | 10.782 | 7.077 | 0.596 |
| b | 5.998 | 10.796 | 7.082 | 0.545 | |
| c | 6.193 | 10.782 | 7.240 | 0.601 | |
| Band 3 | a | 4.497 | 10.061 | 5.981 | 0.613 |
| b | 4.495 | 10.055 | 5.999 | 0.606 | |
| c | 4.853 | 10.061 | 6.222 | 0.601 | |
| Band 4 | a | 2.851 | 8.984 | 4.088 | 0.760 |
| b | 2.869 | 8.988 | 4.103 | 0.746 | |
| c | 3.036 | 8.984 | 4.244 | 0.758 | |
| Band 5 | a | 4.238 | 11.861 | 7.822 | 1.091 |
| b | 4.654 | 12.376 | 7.893 | 1.043 | |
| c | 4.807 | 11.861 | 8.416 | 0.910 | |
| Band 6 | a | 0.489 | 1.887 | 1.074 | 0.181 |
| b | 0.582 | 1.960 | 1.086 | 0.172 | |
| c | 0.620 | 1.887 | 1.137 | 0.144 | |
| Band 7 | a | 0.100 | 0.585 | 0.216 | 0.054 |
| b | 0.117 | 0.561 | 0.219 | 0.053 | |
| c | 0.124 | 0.585 | 0.227 | 0.047 | |
| 注:a:原始影像,b:C校正影像,c:CR法校正影像。 | |||||
依据CR法校正原理,阴影区与邻近非阴影区同一地物应具有相近DN值,因此阴影重建后,相对均方根误差rRMSE(式(14))可用来定量评价某种覆被类型阴影重建效果。依据实验区地表覆被类型(图10、图11(a)),随机选择两种方法校正后阴影区有林和无林地20个像元计算。CR法在有林和无林地各波段,都取得较小均方根误差,证明CR法和参考光谱更接近,C校正影像和原始影像相比,也取得较小均方根误差,精度略低于CR法。


原始阴影均方根误差范围为2.090%—4.635%,而C校正后误差范围为1.440%—4.261%,原始影像和C校正影像都在近红外波段误差最大。相对而言,CR法阴影校正后均方根误差范围为0.516%—2.919%,近红外波段明显降低。
表 2 C校正和CR法校正前后阴影区地类典型波段rRMSE值
Table 2 rRMSE values in SWIR,NIR,Red,Green bands in per land use cover type after shadow restoration of C and CR method
| 影像 | 类别 | green | red | NIR | SWIR |
| 原始影像 | 有林地 | 2.740 | 2.090 | 4.635 | 3.803 |
| 无林地 | 3.262 | 3.344 | 3.621 | 3.515 | |
| C校正影像 | 有林地 | 2.640 | 1.440 | 4.261 | 3.232 |
| 无林地 | 2.138 | 3.139 | 3.467 | 2.848 | |
| CR校正影像 | 有林地 | 1.847 | 0.516 | 2.919 | 2.546 |
| 无林地 | 1.794 | 2.390 | 1.024 | 1.028 |
3.3.4 自动分类评价
丘陵地区不规则的地形起伏造成遥感影像亮度变化,会影像地物辨别和分类精度,因此自动分类精度验证也是检验地形校正精度的标准。真实的地表覆被类型以2015年研究区土地变更调查数据确定,土地利用类型主要包括农村居民点、有林地、河流水面、耕地和道路(图10)。
但由于遥感影像是栅格数据,分辨率仅为30,混合像元大量存在,面积小且零散的农村居民点、河流水面、农村道路无法识别,因此将变更数据类型粗略划分为有林地和无林地,以突出植被的分类效果,忽略较小图斑(Hantson和Chuvieco,2011)。图11(a)显示的是地类归并后的真实地表覆被类型,图11(b)—图11(d)分别是对原始影像、C校正影像和CR法校正后影像按照相同的分类参数和迭代次数,进行非监督分类的结果。分类后原始影像图斑细碎,C校正影像和CR法校正影像阴影减少,有林地更为集中连片,说明校正后阴影区与邻近非阴影区色彩、纹理呈现出更好的一致性。表3是对分类后阴影进行混淆矩阵分析,计算出分类正确和错误像元个数。由于混合像元和分辨率问题,分类精度并不高,但CR法校正使准确率从43.59%提高到61.57%。
表 3 原始影像、C校正和CR法校正前后分类精度表
Table 3 Confusion matrix of classification results
| 影像 | 有林地 | 无林地 | 总体精度/% | |||
| 正确 | 错误 | 正确 | 错误 | |||
| 原始影像 | 10876 | 8266 | 1939 | 8319 | 43.59 | |
| C校正影像 | 14444 | 8782 | 1423 | 4751 | 53.97 | |
| CR校正影像 | 15264 | 7367 | 2838 | 3931 | 61.57 | |
4 结 论
鉴于高分辨率DEM数据获取困难且精度不高,本研究以西南丘陵常态山和喀斯特山混交区域为研究对象,随机截取了2015年Landsat 8 OLI多光谱影像进行试验,通过去除包络线的方法(CR法),搜寻相似像元,替换阴影像元光谱亮度信息,达到阴影校正的目的。实验结果显示:(1)CR法校正后,阴影区与非阴影区视觉效果趋于一致,阴影区地物细节比较丰富;(2)CR校正后每个波段DN值都有所提高,与阴影较少影像拟合比C校正更优;(3)CR法校正后影像主要波段标准差减小,有林地和无林地样点与非阴影区参考光谱的相对均方根误差在2.919%以内,最低仅为0.516%;(4)自动分类评价显示,与2015年研究区的土地变更调查数据对比,CR法校正使准确率从52.71%提高到60.38%。因此CR校正对地形复杂的丘陵地区遥感影像阴影去除有效,且摆脱了DEM数据依赖,实现计算机自动识别和参数独立获取,具有一定的应用价值。
本文实验证明了CR法在地形复杂的丘陵地区取得了更优的校正效果,但其他研究也证明了DEM相关校正模型的优势,可见不同方法的适用性性值得考虑。理论上,CR法阴影校正对多波段的遥感影像都适用,波段越多,相似像元寻找更准确,效果也更好,但更适用于地物波谱特征鲜明地区,例如植被覆盖地区效果优于裸地,在各波段反射率都趋于一致的冰原地区无效。另外CR法也仍有发展的空间:一方面,对于阴影区占比过大或亮度整体偏低的影像,同谱异质现象也会给寻找相似像元带来极大误差,CR法校正效果不佳,如能引入更为详细的地表覆盖类型数据,就可很大程度上解决寻找相似像元步骤的同谱异质问题;另一方面,阴影像元的提取精度是包络线法去除阴影的前提,如果提取不准确,校正后可能会重建非阴影像元,反而降低了校正精度,因此需通过反复实验获得最优的阴影提取阈值;最后,本研究选择自动分类检验是由于粗略的地表覆被类型数据便于获得,且土地变更调查数据通过官方发布,真实可信,但自动分类精度验证是地形校正应用中的一种,尚有许多其他领域应用,如森林覆盖度、NDVI、NPP估算等,都有待下一步验证。
参考文献(References)
-
Bai J W, Zhao Y C, Zhang B, Tong Q X and Zheng L F. 2003. Study on the classification methods of the hyperspectral image based on the continuum removed. Computer Engineering and Applications, 39 (13): 88–90, 128. [DOI: 10.3321/j.issn:1002-8331.2003.13.028] ( 白继伟, 赵永超, 张兵, 童庆禧, 郑兰芬. 2003. 基于包络线消除的高光谱图像分类方法研究. 计算机工程与应用, 39 (13): 88–90, 128. [DOI: 10.3321/j.issn:1002-8331.2003.13.028] )
-
Chen J, Zhu X L, Vogelmann J E, Gao F and Jin S M. 2011. A simple and effective method for filling gaps in Landsat ETM+ SLC-off images. Remote Sensing of Environment, 115 (4): 1053–1064. [DOI: 10.1016/j.rse.2010.12.010]
-
Chen Y, Wen D, Jing L and Shi P. 2007. Shadow information recovery in urban areas from very high resolution satellite imagery. International Journal of Remote Sensing, 28 (15): 3249–3254. [DOI: 10.1080/01431160600954621]
-
Duan C Y, Gong H L, Li X J and Chen B B. 2014. Shadow extraction based on characteristic components and object-oriented method for high-resolution images. Journal of Remote Sensing, 18 (4): 760–770. [DOI: 10.11834/jrs.20143243] ( 段光耀, 宫辉力, 李小娟, 陈蓓蓓. 2014. 结合特征分量构建和面向对象方法提取高分辨率卫星影像阴影. 遥感学报, 18 (4): 760–770. [DOI: 10.11834/jrs.20143243] )
-
Espindola G M, Câmara G, Reis I A, Bins L S and Monteiro A M. 2006. Parameter selection for region‐growing image segmentation algorithms using spatial autocorrelation. International Journal of Remote Sensing, 27 (14): 3035–3040. [DOI: 10.1080/01431160600617194]
-
Gao Y N and Zhang W C. 2009. A simple empirical topographic correction method for ETM+ imagery. International Journal of Remote Sensing, 30 (9): 2259–2275. [DOI: 10.1080/01431160802549336]
-
Ge H L, Lu D S, He S Z, Xu A J, Zhou G M and Du H Q. 2008. Pixel-based Minnaert correction method for reducing topographic effects on a Landsat 7 ETM+ image. Photogrammetric Engineering and Remote Sensing, 74 (11): 1343–1350. [DOI: 10.14358/PERS.74.11.1343]
-
Guo J H, Tian Q J and Wu Y Z. 2006. Study on multispectral detecting shadow areas and a theoretical model of removing shadows from remote sensing images. Journal of Remote Sensing, 10 (2): 151–159. [DOI: 10.11834/jrs.20060224] ( 虢建宏, 田庆久, 吴昀昭. 2006. 遥感影像阴影多波段检测与去除理论模型研究. 遥感学报, 10 (2): 151–159. [DOI: 10.11834/jrs.20060224] )
-
Hantson S and Chuvieco E. 2011. Evaluation of different topographic correction methods for Landsat imagery. International Journal of Applied Earth Observation and Geoinformation, 13 (5): 691–700. [DOI: 10.1016/j.jag.2011.05.001]
-
Liu W and Yamazaki F. 2012. Object-based shadow extraction and correction of high-resolution optical satellite images. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 5 (4): 1296–1302. [DOI: 10.1109/JSTARS.2012.2189558]
-
Liu Z Y, Li X H, Shen R P, Zhu F, Zhang K, Wang T and Wang Y Y. 2014. Selection of the best segmentation scale in high-resolution image segmentation. Computer Engineering and Applications, 50 (6): 144–147. ( 刘兆祎, 李鑫慧, 沈润平, 朱枫, 张凯, 王恬, 王媛媛. 2014. 高分辨率遥感图像分割的最优尺度选择. 计算机工程与应用, 50 (6): 144–147. )
-
Mielke C, Boesche N K, Rogass C, Kaufmann H and Gauert C. 2015. New geometric hull continuum removal algorithm for automatic absorption band detection from spectroscopic data. Remote Sensing Letters, 6 (2): 97–105. [DOI: 10.1080/2150704X.2015.1007246]
-
Mu Y, An Y L, Wang Z and Gao X. 2014. Comparison of different topographic correction models for surface reflectance calculating in rugged terrain area. Mountain Research, 32 (3): 257–266. ( 穆悦, 安裕伦, 王喆, 高翔. 2014. 不同地形校正模型计算地形复杂山区地表反射率的对比. 山地学报, 32 (3): 257–266. )
-
Richter R, Kellenberger T and Kaufmann H. 2009. Comparison of topographic correction methods. Remote Sensing, 1 (3): 184–196. [DOI: 10.3390/rs1030184]
-
Shahtahmassebi A, Yang N, Wang K, Moore N and Shen Z Q. 2013. Review of shadow detection and de-shadowing methods in remote sensing. Chinese Geographical Science, 23 (4): 403–420. [DOI: 10.1007/s11769-013-0613-x]
-
Tan Z C and Lu R H. 2009. An improved genetic algorithm for image segmentation based on maximum interclass variance. Journal of Southwest University(Natural Science Edition), 31 (1): 87–90. ( 谭志存, 鲁瑞华. 2009. 基于最大类间方差的图像分割改进遗传算法. 西南大学学报(自然科学版), 31 (1): 87–90. )
-
Teillet P M, Guindon B and Goodenough D G. 1982. On the slope-aspect correction of multispectral scanner data. Canadian Journal of Remote Sensing, 8 (2): 84–106. [DOI: 10.1080/07038992.1982.10855028]
-
Wen Z F, Shao G F, Mirza Z A, Chen J L, Lü M Q and Wu S J. 2015. Restoration of shadows in multispectral imagery using surface reflectance relationships with nearby similar areas. International Journal of Remote Sensing, 36 (16): 4195–4212. [DOI: 10.1080/01431161.2015.1079343]
-
Wen Z F, Wu S J, Chen J L, Lv M Q and Jiang Y. 2016. Radiance transfer process-based shadow correction method for urban regions in high spatial resolution image. Journal of Remote Sensing, 20 (1): 138–148. [DOI: 10.11834/jrs.20165109] ( 温兆飞, 吴胜军, 陈吉龙, 吕明权, 姜毅. 2016. 辐射特征支持下的城市高分影像阴影校正. 遥感学报, 20 (1): 138–148. [DOI: 10.11834/jrs.20165109] )
-
Yamazaki F, Liu W and Takasaki M. 2009. Characteristics of shadow and removal of its effects for remote sensing imagery // 2009 IEEE International Geoscience and Remote Sensing Symposium. Cape Town: IEEE: IV-426-IV-429 [DOI: 10.1109/IGARSS.2009.5417404]
-
Yang Q Y, Ma Z L, Jiang Z C, Luo W Q and Xie Y Q. 2012. Restoration of missing information of mountain shadow on remote sensing images in Peak Cluster Karst Area based on Kriging. Remote Sensing for Land and Resources, 20 (4): 112–116. [DOI: 10.6046/gtzyyg.2012.04.19] ( 杨奇勇, 马祖陆, 蒋忠诚, 罗为群, 谢运球. 2012. 峰丛洼地遥感图像山体阴影缺失的克里格修复. 国土资源遥感, 20 (4): 112–116. [DOI: 10.6046/gtzyyg.2012.04.19] )
-
Zhou Y, Chen J, Guo Q H, Cao R Y and Zhu X L. 2014. Restoration of information obscured by mountainous shadows through Landsat TM/ETM+ images without the use of DEM data: a new method. IEEE Transactions on Geoscience and Remote Sensing, 52 (1): 313–328. [DOI: 10.1109/TGRS.2013.2239651]


