
|
收稿日期: 2016-03-21; 修改日期: 2016-07-18; 优先数字出版日期: 2016-07-25
基金项目: 国家自然科学基金(编号:41371360);中国科学院重点部署项目(编号:KZZD-EW-TZ-18)
第一作者简介: 李彬(1989— ),男,助理工程师,研究方向为地表辐射平衡方面的研究。E-mail:
983229508@qq.com
通讯作者简介: 辛晓洲(1976— ),男,副研究员,研究方向为地表辐射与能量平衡遥感估算理论与方法研究。E-mail:
xin_xzh@163.com
中图分类号: TP79
文献标识码: A
|
摘要
云阴影检测在遥感科学领域是一个重要研究方向,在许多方面有重要应用。单纯采用光谱阈值法识别云阴影会面临较多困难,难以准确识别,而采用时间序列法,则需耗费较多机时,过程较为繁复。在准确识别云像元的基础上,应用几何学方法识别云阴影是较为准确、实用的方法。目前,应用几何学方法计算起伏地形条件下的云阴影分布和变化特征的研究较少,本文提出了一种基于几何学方法的复杂地形条件下的云阴影识别方法,可以计算云像元对应阴影在复杂地形上的位置。模拟和实验表明,所提出的算法在识别复杂地形条件的云阴影方面具有较好效果,克服了几何法识别云阴影模型的原有缺陷。
关键词
云阴影, 复杂地形, DEM, 云3D几何效应
Abstract
Many methods for cloud shadow detection in remote sensing have been proposed, such as utilizing the threshold and time series. Adopting the spectrum threshold can encounter many difficulties, such as the selected threshold having significant uncertainty and can be influenced by other factors. The time series method requires much time, and its process is complicated. The geometric method is particularly more accurate and practical. However, few studies have investigated the geometry method to calculate the cloud shadows on complex terrains. Therefore, this paper reports on a method that identifies cloud shadows on complex topography based on the principle of geometrical optics.When a straight line crosses a plane, it intersects with the plane at a point. However, when a straight line crosses a curved surface, it can intersect with the surface at many points. We can abstract the light through the cloud pixels as a straight line, whereas the complex terrain can be treated as a curved surface. When the light arrives on the surface by a cloud, it inevitably intersects with the surface at a certain point. This point is the shadow position casted by the cloud. We combined the previous formula to calculate the cloud shadows on the horizontal surface with DEM, which is based on the above principle of the proposed algorithm.A series of simulations and experiments determined that the proposed algorithm could properly describe the cloud shadows on the complex surface. The actual calculated and visual interpretation results had high consistency in the shadow position, and these had better fitting with the coverage by comprehensive interpretation. Theγ2 value was 0.78, whereas the RMSE was 3.49, which were much better than the results that did not consider the terrain effect. Our algorithm had a clearer advantage in terms of comprehensively identifying cloud shadows compared with the results of the threshold method based on images.An algorithm was proposed in this study based on geometry method to calculate the cloud shadows on complex terrain and overcome the existing defects of the geometry method in identifying cloud shadows. This algorithm could obtain the shadow positions of corresponding cloud pixels on a complex terrain, and the distortion of cloud shadows on complex surfaces could be properly described. However, the accuracy of the calculated results could be influenced by many factors, such as the accuracy of cloud detection and thin clouds that cannot be easily detected. However, these clouds can also cast shadows on the ground. Cloud height is an important parameter in the calculation process that largely influences the result, but the acquisition of accurate cloud heights has a certain difficulty level in remote sensing. The DEM and visible band data also have a matching problem.
Key words
cloud shadow, complex terrains, DEM, geometric effelt
1 引 言
云阴影检测在遥感科学领域是一个重要的研究方向。云及其阴影对卫星产品的生成有显著影响,不仅会降低产品质量,对长时间序列的数据造成系统性偏差,也会对分析地表覆被变化和地表反照率、温度等的研究产生影响,如不能很好区分,云阴影可能被误判为水体或湿地(Vittorio 等,2002)。随着遥感影像分辨率的不断提高,云3D几何效应对辐射估算精度的影响越来越明显,所谓3D几何效应包括云及其阴影位置的偏移,由于云的立体结构特点,在传感器视角倾斜时,云的“视位置”与真实位置会发生偏离,在不同太阳高度角,被云阴影覆盖的地表象元位置与云的投影位置也会有一定偏离,这对云天条件下地表辐射估算有较大影响(Wyser,2002)。
时间序列法是云阴影检测的一个主流方法,其原理是:在晴空条件下,某一像元的地表反射率与时间呈函数依赖关系,当有云或阴影时,该像元的地表反射率会偏离地表反射率—时间曲线,据此可判定该像元是否受云阴影影响(杨昌军 等,2005)。Goodwin等人(2013)提出了针对Landsat TM/ETM+的云及云阴影的时间序列自动检测方法。Zhu和Woodcock(2014)提出了一种以时间序列法为基础的Tmask方法,主要是将基于时间序列模型预测得到的反照率,与Landsat B2、B4、B5观测值进行比较,进而识别云及云阴影像元。Liu和Yang(2013)将MODIS地表反射率产品与时间序列法结合,提出了IBCD算法。云阴影检测的时间序列模型要花费较多机时,且对异常地表变化易造成误判,需要积累较多的观测影像,实时性较差,且具有较强的地域性。
光谱阈值法也是云阴影检测的常用方法(宋小宁和赵英时,2003;刘希 等,2005;武艳 等,2012;Zhu和Woodcock,2015;Zhu 等,2015)。单纯依靠光谱检测,不可避免地会把云阴影与地表其他较暗的像元相混淆,如地形阴影和湿地等,在某些植被覆盖度较高或地表状态复杂的地方较难区别检测,该方法也容易漏掉一些不是很暗的云阴影区。Hutchison 等人(2009)对单纯使用地表反射率进行光谱检测的云阴影识别方法进行了评估分析,认为该方法在多数情况下存在较大识别误差。另一方面,该方法无法将被云自身遮挡的阴影识别出来,造成局限。
在云检测基础上,可以基于几何关系识别云阴影。即已知太阳天顶角、太阳方位角、云高度、云边缘等情况下,根据几何投影预测云阴影位置。Knudby等人(2011)利用云顶亮温与晴空时的参考温度的差值,比上垂直减温率来估算云高度,并运用Simpson等人(2010)提出的几何方法,估算云阴影。Luo等人(2008)利用几何方法计算云阴影,并基于云与云阴影的形状相似性进行匹配检验。在相对平坦的下垫面,基于几何法的云检测方法的计算效果要优于光谱法阈值法,但在复杂地形条件下的云阴影可能会发生位置和形状畸变,会对云阴影识别产生一定影响。借鉴以往云阴影识别方法,本文提出了一种复杂地形条件下的云阴影计算方法。
2 方法原理
在太阳高度角和太阳方位角给定的前提下,云阴影在地表的畸变主要取决于坡度与坡向。依据水平地表的云阴影计算结果,根据像元所处位置的坡度、坡向,虽可进行校正,但较难确定用于校正的位置点。在复杂地形上的云阴影与形成它的云具有某种相似性,云阴影相对于云发生了平移、缩放和旋转等,理论上讲,采用仿射变换是可行的方法。但实际地形坡度、坡向变化复杂,云阴影平移、缩放和旋转难以做统一描述,因此,仿射变换所需算子难以确定。
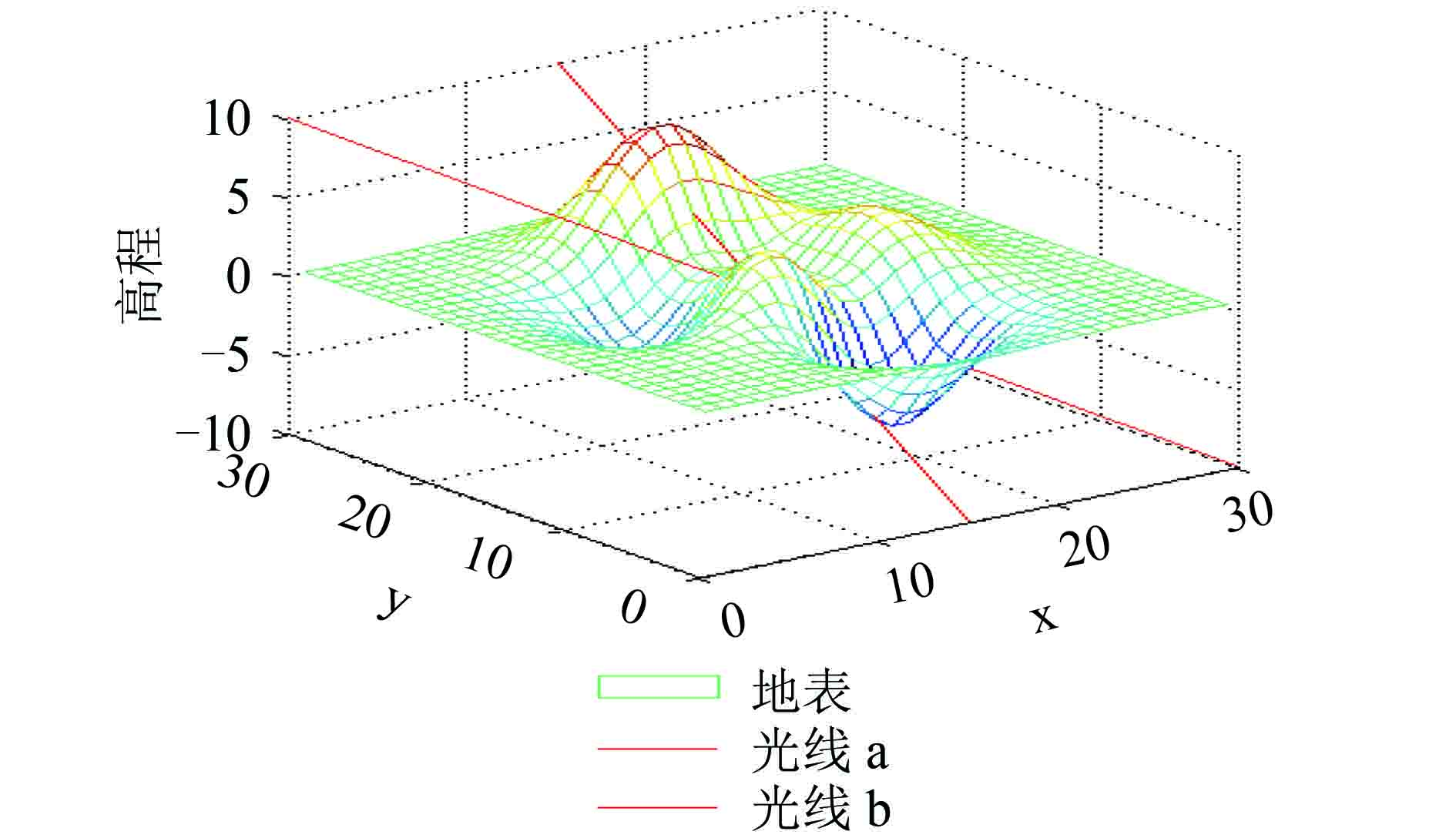
众所周知,当一条直线通过一个平面时会与该平面相交于一点,但是当一条直线穿过一个起伏不定的曲面时则可能会与该曲面相交于数个点。将通过云像元的光线抽象为一条直线,将复杂的地表抽象为一个起伏不定的曲面,当光线透过云到达地表时必然与地表交于某点,该点即为云投射的阴影位置,如图1所示。红线代表投射的光线,有颜色的网格代表起伏的地表。图1中可以看出光线投射在地表,与地表交于某点的过程。尽管投射光线在图中会穿过曲面,并与曲面交于若干个点,但实际上投射光线不会穿过地表,它会被先遇到的地表面遮挡,首先照到的一般是高程较高的区域。

式(1)—式(4)是Luo 等人(2008)利用几何法计算平坦地表云阴影位置的计算公式。式中,(ximg,yimg)为遥感图像上的位置,(xnadir,ynadir)为云在地表的垂直投影位置。h为云高,θs和θv 分别为太阳天顶角和观测天顶角,Φs、Φv分别是太阳方位角和观测方位角,γ为角度校正参数。由于卫星观测视角的原因,云在遥感图像上的位置相比其实际位置会产生一定的偏移,需要进行校正,式(1)和式(2)即为云像元的视位置校正,式(3)和式(4)所得结果为云的阴影位置。
| ${x_{\rm{nadir}}} = {x_{\rm{img}}} + h \times \tan {\theta _{\rm{v}}}\sin \left( {{\phi _{\rm{v}}} + \gamma } \right)$ | (1) |
| ${y_{\rm{nadir}}} = {y_{\rm{img}}} + h \times \tan {\theta _{\rm{v}}}\cos \left( {{\phi _{\rm{v}}} + \gamma } \right)$ | (2) |
| ${x_{\rm{shadow}}} = {x_{\rm{nadir}}} - h \times \tan {\theta _{\rm{s}}}\sin \left( {{\phi _{\rm{s}}} + \gamma } \right)$ | (3) |
| ${y_{\rm{shadow}}} = {y_{\rm{nadir}}} - h \times \tan {\theta _{\rm{s}}}\cos \left( {{\phi _{\rm{s}}} + \gamma } \right)$ | (4) |
依据上述公式,针对云检测图像中的任意云像元,均可获取云像元在水平地表的垂直投影位置及云像元在水平地表上的阴影位置,结合云高度,能推导出云像元遮挡光线的直线方程。
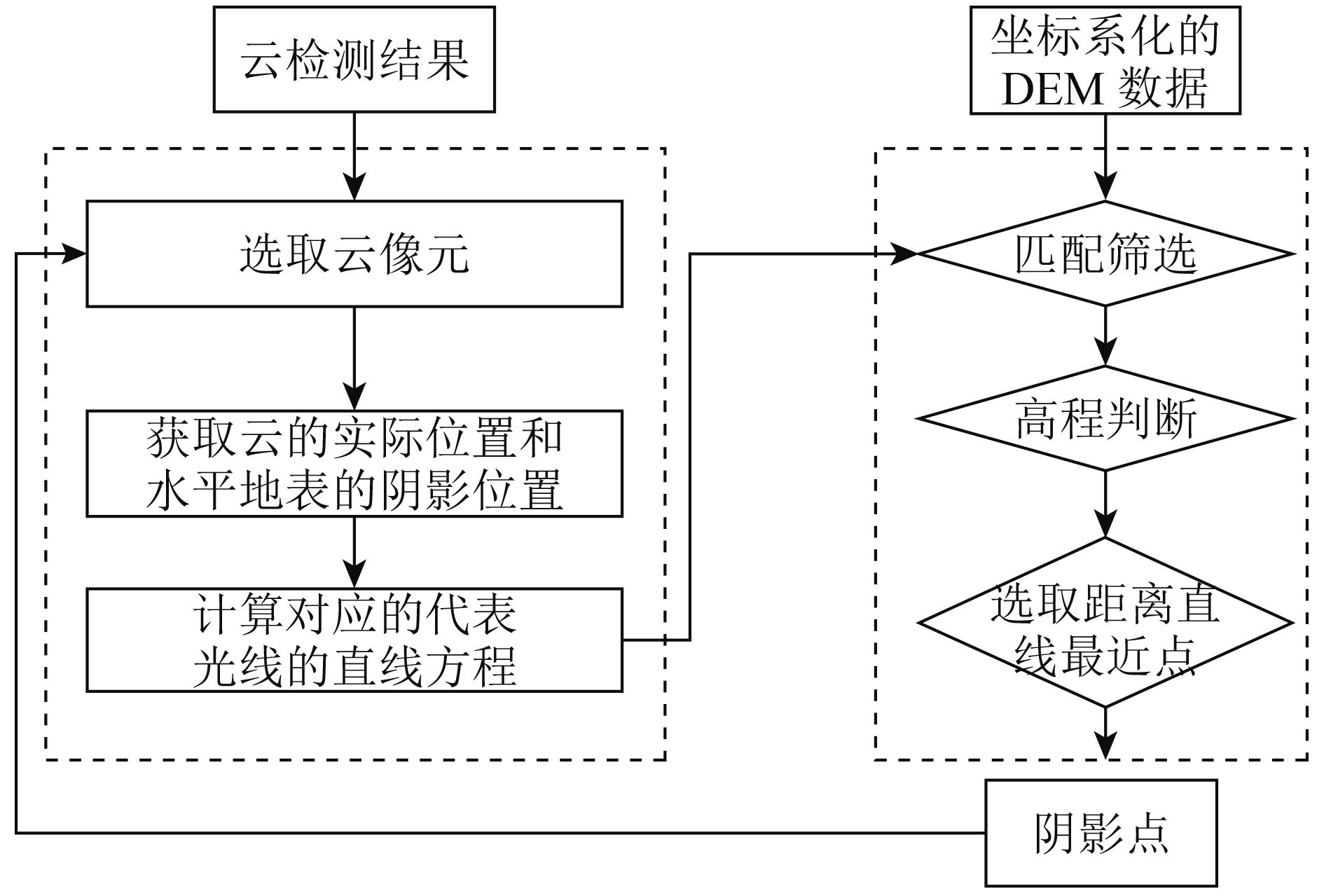
获取云检测样本区域的数字地面高程模型DEM,首先将DEM数据和试验影像数据配准,然后将DEM中各点的(x,y,z)代入被遮挡光线的直线方程,寻找匹配点的坐标,匹配上的点,即为相应云像元所投射阴影点的位置。逐一获取云检测图像中各个云像元阴影点的位置,从而获取云阴影的位置。复杂地形条件下的几何法云阴影识别计算流程如图2。
为了能够在同一个坐标体系下完成计算,需要将获取的云检测图像对应区域的DEM数据转换到相应空间坐标系下。由于DEM的原始数据代表的是海拔高度,因此需要将原始的高程转换到一个以地平高度为基准的数据平台上。首先获取云检测图像对应的DEM中各点高程的最小值,分别将所述云检测图像中的各点的高程减去该高程最低值。然后将处理后的DEM数据中各点的高程值除以云检测图像的分辨率,使原始的高程数据转换到与云检测数据同一的空间坐标系下。
3 云阴影识别的技术流程
3.1 建立云像元遮挡光线的直线方程
以某一云像元为例,其所遮挡的太阳入射光线的直线方程可以表示为
| $\frac{{X - {X_{\rm{nadir}}}}}{{{X_{\rm{nadir}}} - {X_{\rm{shadow}}}}} = \frac{{Y - {Y_{\rm{nadir}}}}}{{{Y_{\rm{nadir}}} - {Y_{\rm{shadow}}}}} = \frac{{Z - h}}{h},$ | (5) |
式中,为所述云像元在水平地表上的阴影的位置,(Xnadir,Ynadir)为所述云像元在水平地表的垂直(Xshadow,Yshadow)投影的位置,h为所述云像元的高度值,(X,Y,Z)为云阴影的测算空间点坐标,Z为测算的地表高程值。
3.2 在DEM上搜索云阴影匹配点
根据高程数据中各点的坐标、高程值代入所得光线的直线方程获取匹配的交点坐标,所得交点的坐标即为云像元阴影点的位置。逐一选取云检测图像中各个云像元阴影点的位置,从而获取云阴影的位置。
若所得交点唯一确定,则该交点即为匹配点。若所得交点的数目为多个,则选择各个交点中高程值高且与所得光线距离最小的交点作为匹配点,因为实际光线会首先被高程高的坡面所遮挡,而抽象的计算过程会包含所有直线穿过的点。
在求算过程中,由于坐标均为整数值,直接代入的话很难找到适合直线方程的解,因此需设置一定的误差范围。将对应的高程数据中各点的坐标和高程值带入式(6)(其是由4个不等式构成的方程组)获取所述光线的直线方程与对应地表的交点。
| $\left\{ {\begin{aligned}& {\frac{{X - {X_{\rm{nadir}}}}}{{{X_{\rm{nadir}}} - {X_{\rm{shadow}}}}} + s \geqslant \frac{{Y - {Y_{\rm{nadir}}}}}{{{Y_{\rm{nadir}}} - {Y_{\rm{shadow}}}}},}\\& {\frac{{X - {X_{\rm{nadir}}}}}{{{X_{\rm{nadir}}} - {X_{\rm{shadow}}}}} - s \leqslant \frac{{Y - {Y_{\rm{nadir}}}}}{{{Y_{\rm{nadir}}} - {Y_{\rm{shadow}}}}},}\\& {\frac{{Y - {Y_{\rm{nadir}}}}}{{{Y_{\rm{nadir}}} - {Y_{\rm{shadow}}}}} \leqslant \frac{{Z - h}}{h} + s,}\\& {\frac{{Y - {Y_{\rm{nadir}}}}}{{{Y_{\rm{nadir}}} - {Y_{\rm{shadow}}}}} \geqslant \frac{{Z - h}}{h} - s,}\end{aligned}} \right.$ | (6) |
式中,s为预设的误差范围。在实际应用中,将s由0.01逐步增大至0.06,依次作为误差范围进行计算,求出上述4个公式的公解,作为光线的直线方程与云像元对应的地表的交点。优选地,若交点数量在2—6时,停止迭代,确定交点;次选地,若交点数量在7—15时,停止迭代,确定交点;误差范围s越小,则得到的交点个数越少,结果越准确。特别地,若s在0.01—0.06时未能得到交点,则将s设为0.07—0.09,重复上述过程,直至求出交点。
若所得交点的数目为多个,则选择各个交点中高程值最高且与所述光线距离最小的交点作为匹配点。由于在同一侧坡面也可能会有多个候选的匹配点,因此为了确定这些候选点是否在同一坡面,首先需要进行一步高程差的判断。即在所得交点中获取最小的高程值,将所有交点的高程值减去最小的高程值,获取各交点的高程值与最小高程值的差,若该差值小于两倍数字高程的分辨率则视为无高程差,所有候选点均来自同一坡面;否则视为具有高程差,将具有高程差的交点作为新的候选点。
从中选择与光线距离最小的交点作为匹配点。首先选取各新交点3×3邻域内的两点与该点组成一个平面,获取所述平面与所述光线的交点作为平面光线交点;然后计算所述各新交点与相应的平面光线交点的距离D,逐一计算后,选取D值最小的新交点为最后的匹配点。
4 结果与分析
4.1 模拟分析
运用本文设计的云阴影测算方法,测算复杂地形条件的云阴影分布特征,并与在水平地表测算的云阴影分布特征进行比较。
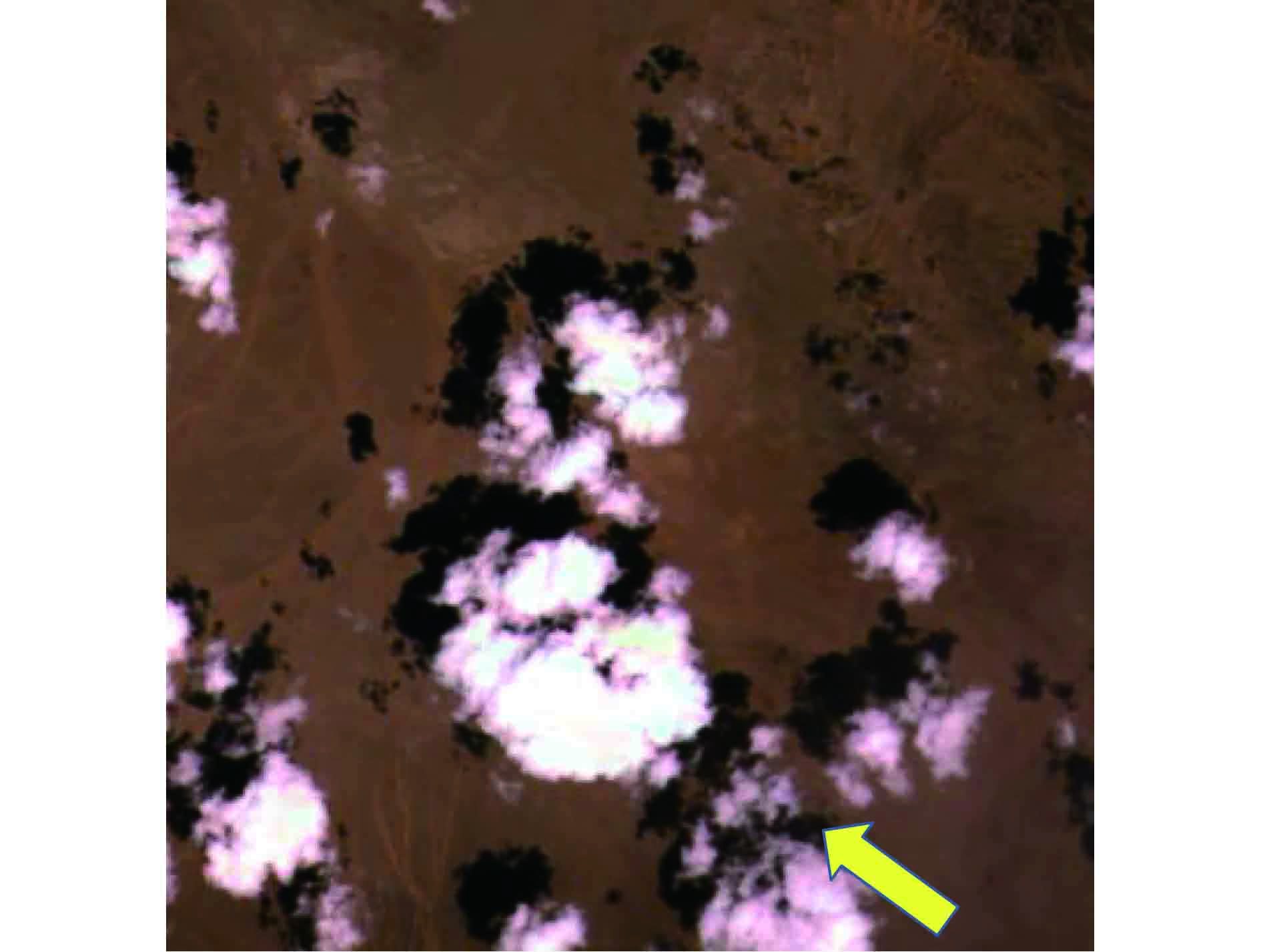
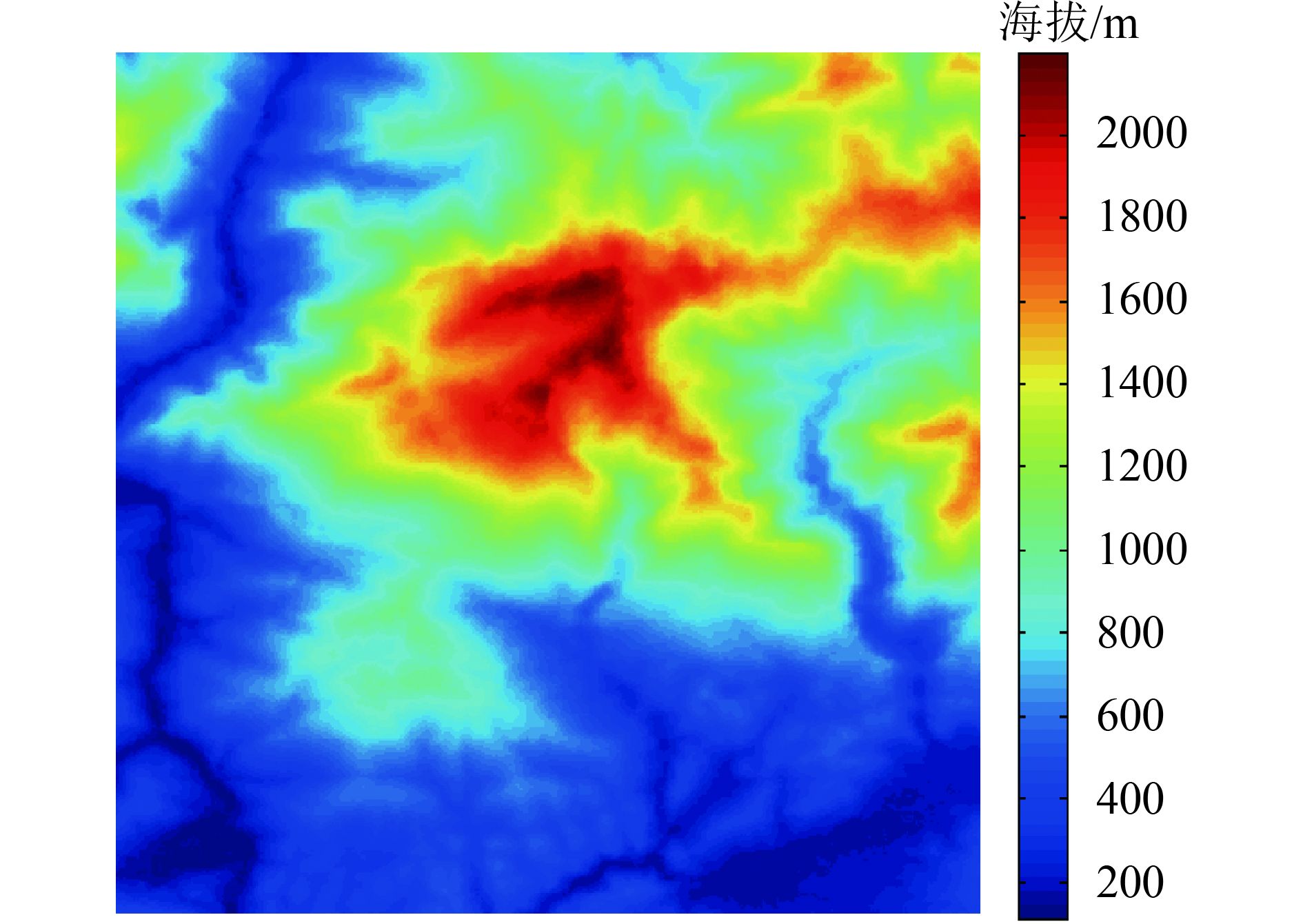
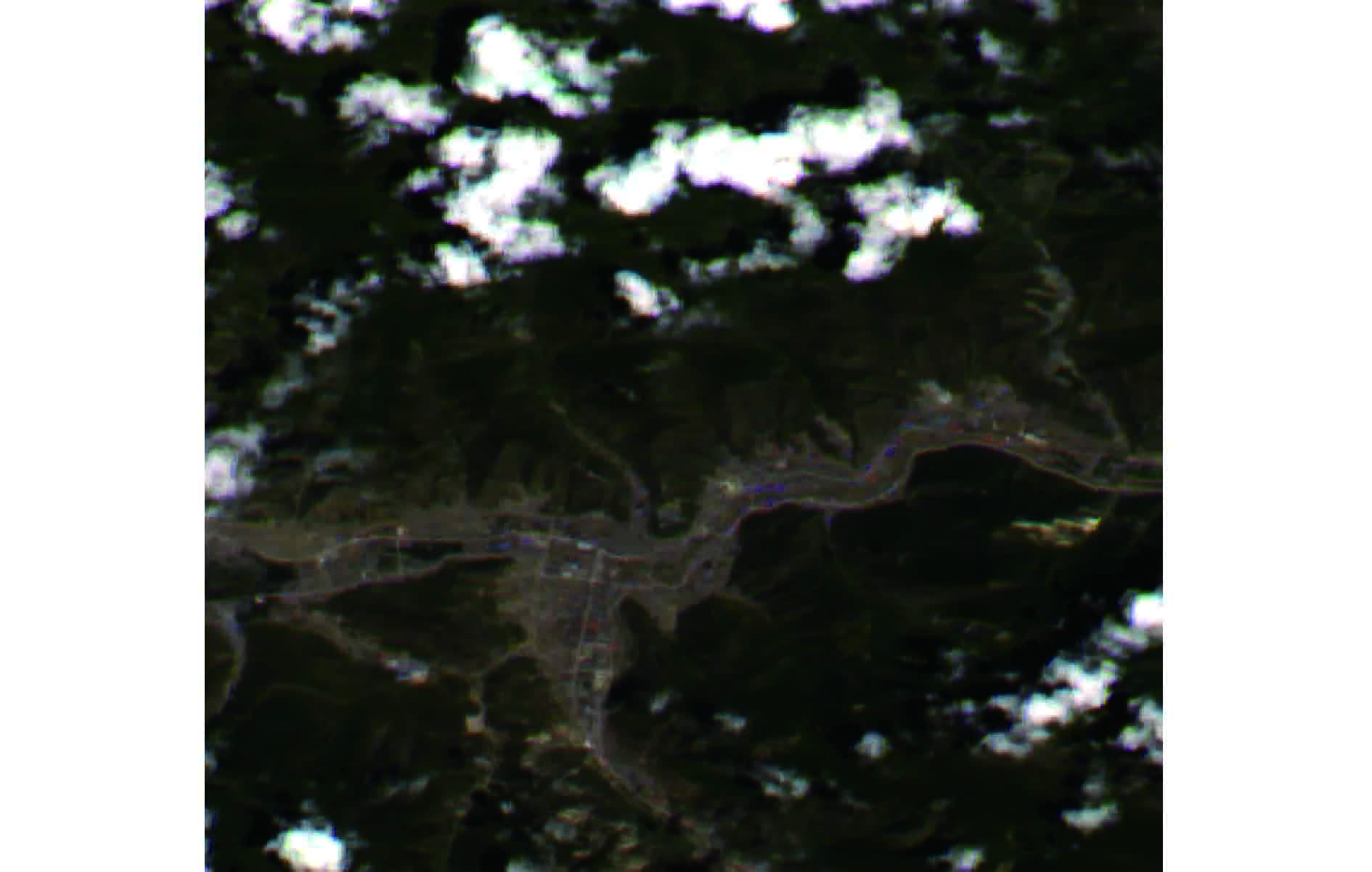
图3为实验区的HJ-1B CCD真彩色影像,图像为400×400个像元,分辨率为30 m,图中的黄色箭头表示太阳的照射方向。为突出地形起伏干扰,实验样区地形高差近2000 m,如图4为ASTER DEM数据,分辨率为30 m。利用图3的云检测结果分别假定在水平地表和在图4所示的地形条件计算相应的云阴影,云高度均设定为同一边缘高度3.3 km。计算之前首先需要对云像元进行卫星的视位置校正,一般来说,位置的偏移程度与云的高度和卫星的视角有关,实际位置会比视位置向卫星观测方向一侧偏移;相同角度的情况下,云高度越高,偏移的程度越大。
图5分别为在复杂地形条件与在水平地表计算的云阴影结果,图5中黄色代表云像元(视位置),红色代表计算得到的云阴影,可以发现图像中同一位置,两者的阴影分布因为地形的影响而有较大不同,相比于水平地表前者云阴影位置发生明显偏移。
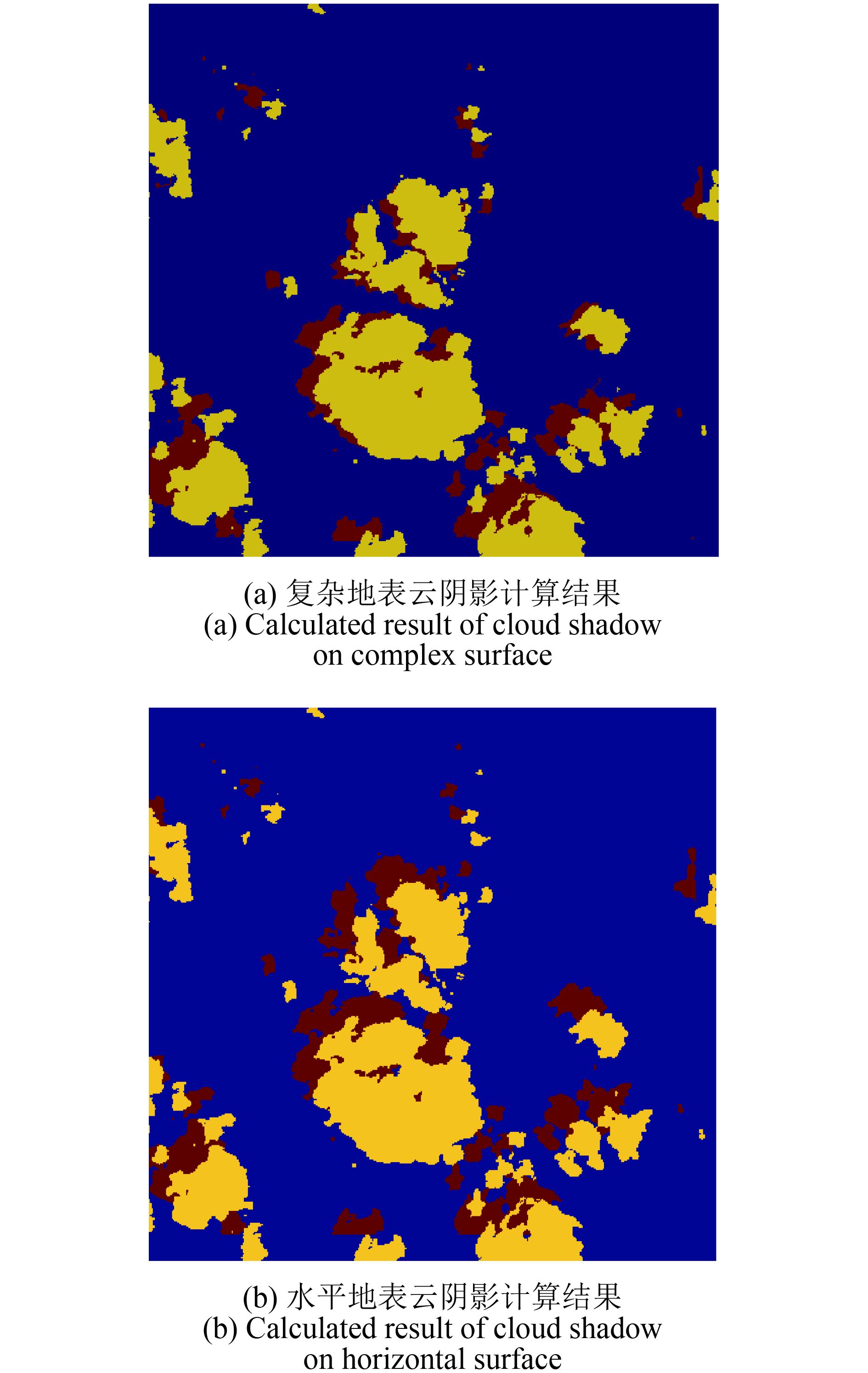
通过抽象的几何分析可以发现,当一束光线相交于一个斜面时,其交点投影于2维平面的位置相比光线交于平面时的位置要向光线照射方向偏移,同时其偏移的程度还与地形坡度与坡向有关,坡度越大,其偏移的程度越大。从图4可以看出,所选取的DEM地形起伏较大,中间部分有明显的凸起,在朝向太阳照射方向形成了一个斜坡,中间区域的云投影在这一区域时,云阴影的位置在2维平面上相比水平地表向坡面的朝向一侧发生偏移。
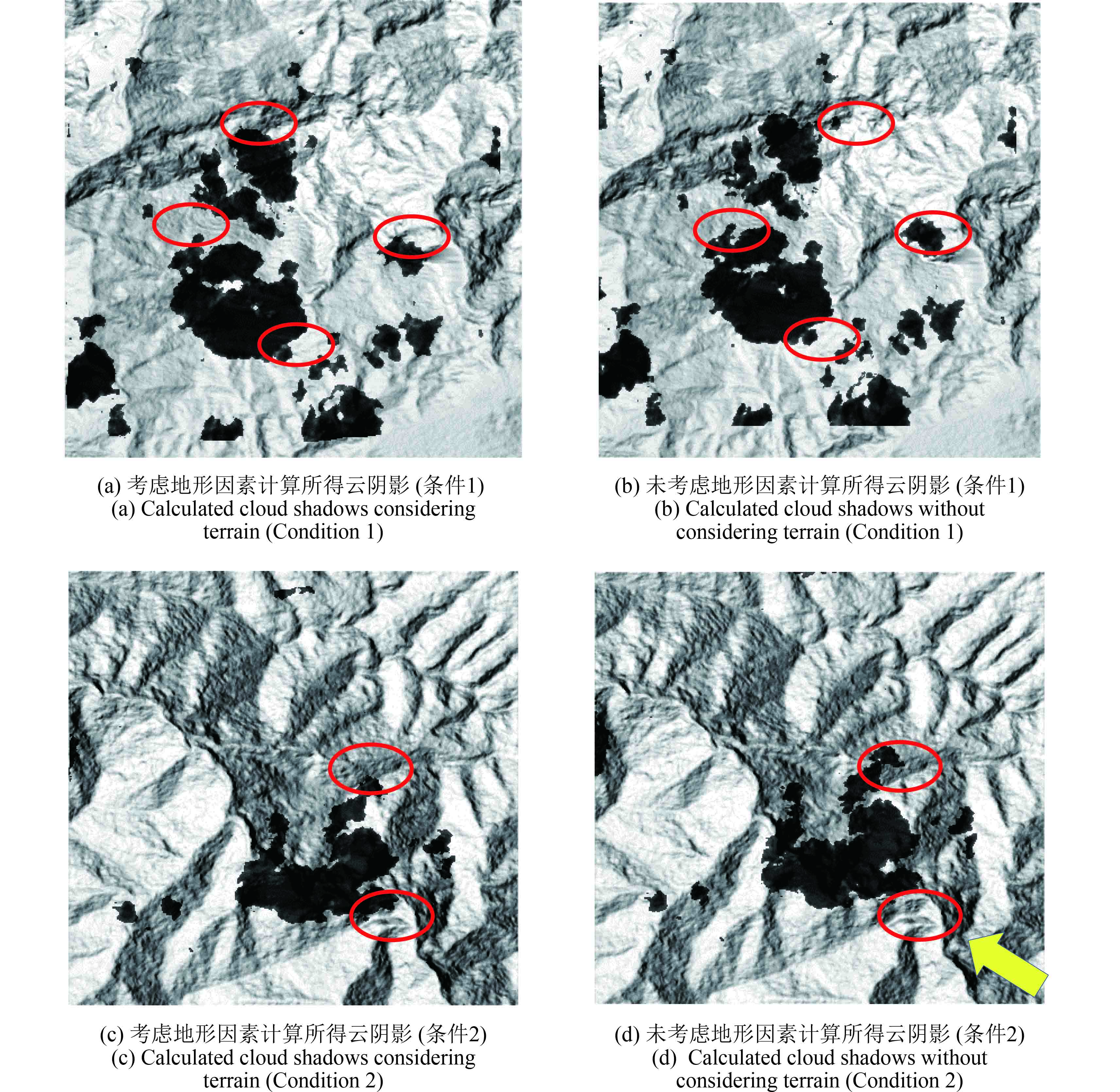
图6为不同地表和云况条件,考虑与未考虑地形计算所得云阴影(去云并叠加地形)。以地形状况为参照,比较两者可以发现在坡地处的阴影分布都有较大的差异,表现出上面所分析的特征,阴影一般会沿着光线照射方向一侧发生偏移,偏移的程度和方向还与对应的地形坡度与坡向有关,如图6(a)和图6(b)。可以说,本文算法在计算复杂地表云阴影方面具有很好的效果,结果与理论分析和逻辑判断具有一致性。为了进一步对算法进行论证,在不同的地形、云况条件下进行了模拟,如图6(c)和图6(d)所示,黄色箭头表示光线的照射方向。可以看到阴影的位置、形状都发生了明显变化,云阴影畸变较大的区域一般坡度较大,坡向变化复杂。相比不考虑地形的计算结果,隆起的山体会对云阴影有明显的遮挡作用,算法在这些方面进行了很好的描述。
地形复杂性(整个区域上高度的标准差)是影响云阴影畸变程度重要因子。高度的标准差可以看成是区域上平均的高度差,高度差越大,则地形的坡度越大。可以用高度标准差与数字高程数据的分辨率之比来表征地形复杂性,它是更加合理地表征地形复杂性的量,因为它表示单位距离上的高度差(王开存 等,2004)。
| ${\text{地形复杂度}} = {\text{高度标准差}}/{\rm{DEM}}{\text{分辨率}}$ | (7) |
由于地形坡度的原因,使得云阴影投射在2维平面的遥感图像上相比投射于水平地表所产生的阴影的像元数要相应的减少。表1统计了同一云况在10种不同地形条件下的云阴影像元数的变化情况,其中在水平地表条件下的云阴影像元数23275。从表1中可以看出地形复杂度越大,其对云阴影像元数的影响就越明显。
表 1 不同地形复杂度的云阴影像元数变化统计表
Table 1 Statistical table of the number of cloud shadow pixels for different terrain complexity
| 景别 | 地形复杂度 | 云阴影像元数 |
| 1 | 3.71 | 23128 |
| 2 | 9.96 | 22842 |
| 3 | 7.14 | 22364 |
| 4 | 6.81 | 22400 |
| 5 | 17.62 | 21634 |
| 6 | 5.02 | 22894 |
| 7 | 4.67 | 23381 |
| 8 | 6.58 | 22277 |
| 9 | 2.46 | 23101 |
| 10 | 1.28 | 23029 |
4.2 实例分析
下面采用实际的遥感数据,在真实的地形和有云条件计算相应的云阴影,并与实际的阴影进行比较分析,进一步论证算法的有效性和合理性。
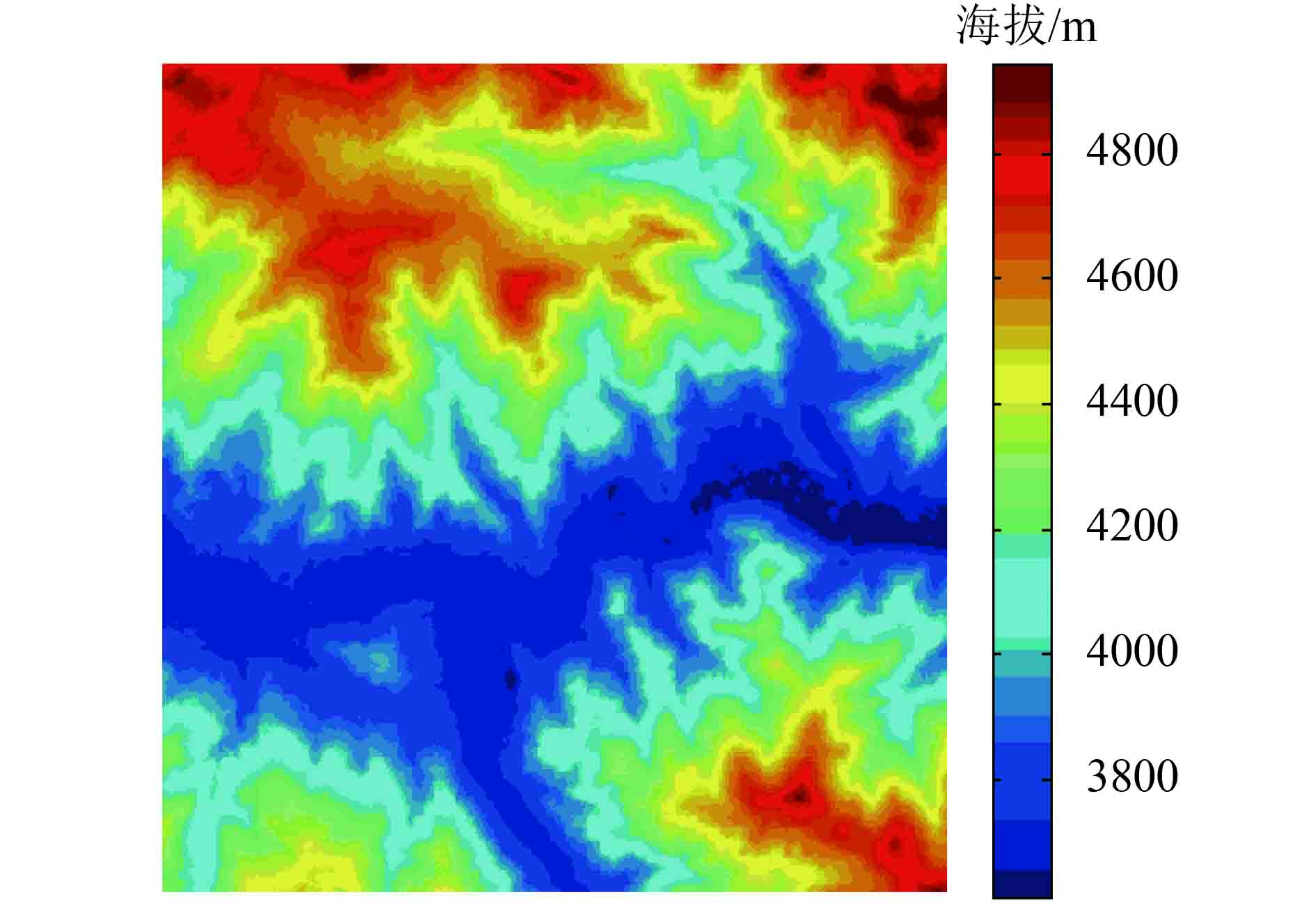
将玉树市作为研究区域进行实验,玉树市位于青海省西南部,地处青藏高原的东部,地形复杂,地势高耸,境内平均海拔4493.4 m,对于研究复杂地形条件下的云阴影畸变和对辐射的影响等方面较为有利。因此选取玉树地区东经96°58′—97°04′, 北纬32°58′—33°04′的一块区域作为实验区。
根据云和云投射到地面的阴影在形状上具有相似性,利用计算得到的阴影,通过迭代不同的云高,以计算的高度范围为上限,计算可能的云阴影与计算的云阴影之间的相似度来判断真实的云高(Luo 等,2008;Zhu和Woodcock,2012)。所谓的相似度是以计算的云阴影和可能的云阴影的重叠部分与计算的云阴影的比率来表示。由于云阴影会被云部分遮挡,因此在计算时只考虑未被云遮挡的部分。迭代不同云高直到匹配相似度达到一定阈值的95%—98%,这一阈值一般可设置在0.3—0.5(Zhu和Woodcock,2012;Zhu 等,2015)。在复杂地形条件下,将阈值设为0.315—0.365,该值为反复实验的经验选取。
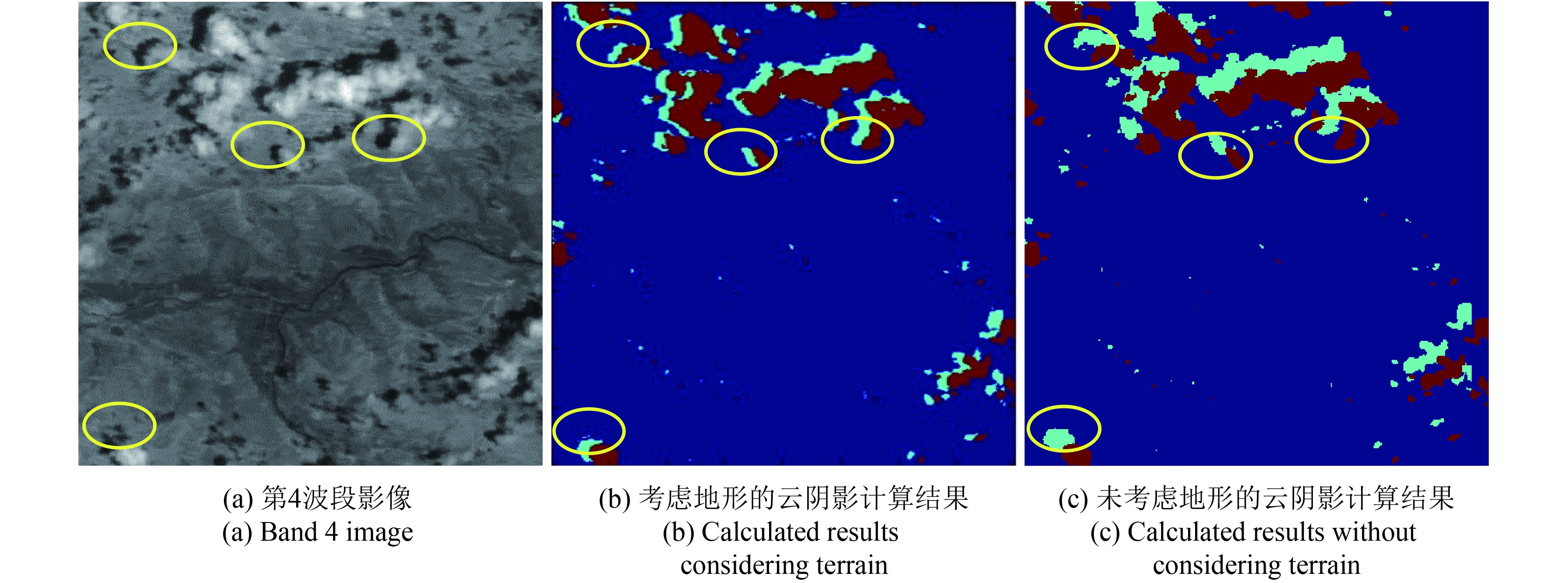
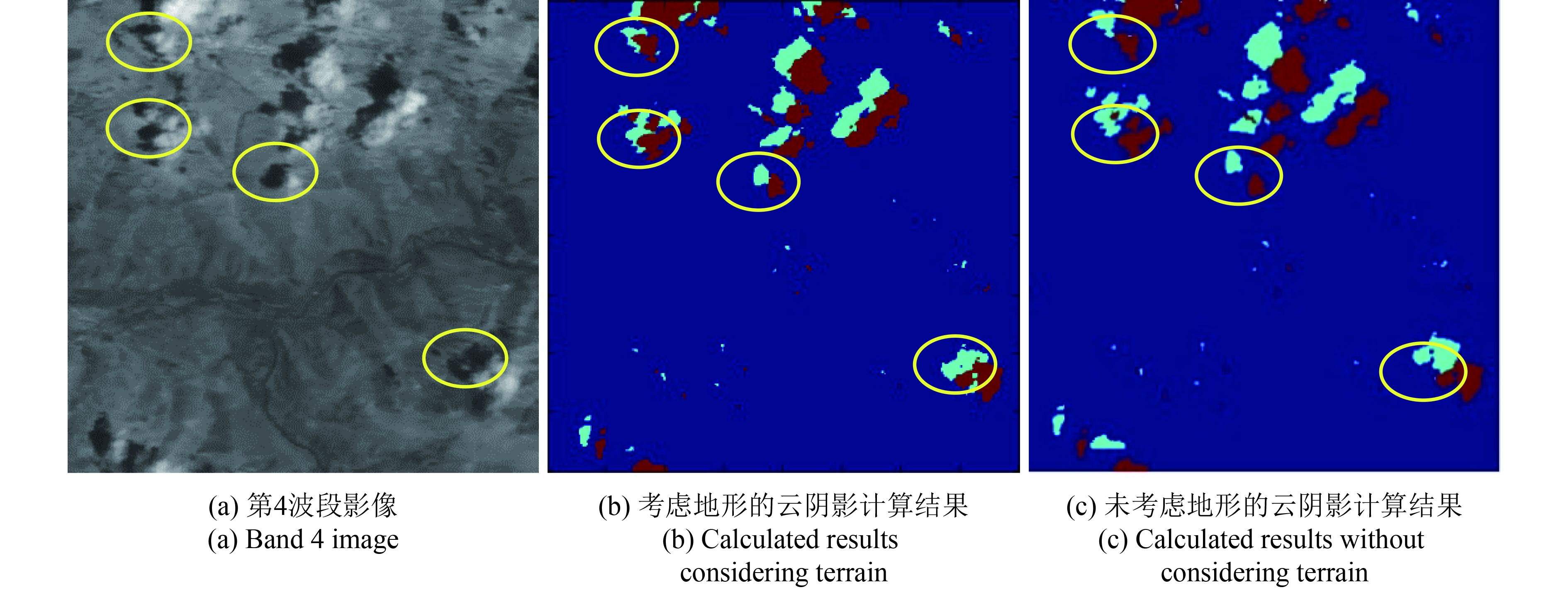
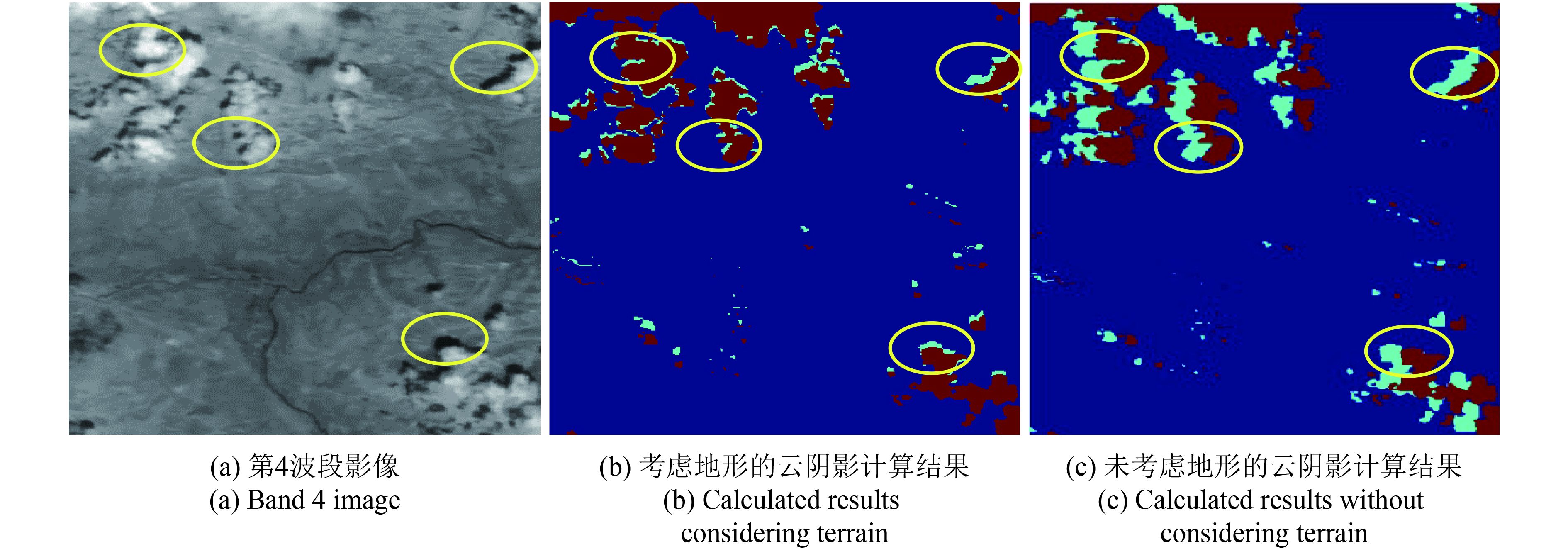
图7是2012年7月8日玉树地区真彩色影像,图8为玉树地区的DEM。图9—图11为3天的玉树地区第4波段影像、考虑地形与未考虑地形的云阴影计算结果。由于第4波段影像所显示的阴影区域较为明显且易于识别,因此采用此波段影像对计算结果进行解译与分析。
对于7月8日的数据,计算过程中,在不考虑地形的情况下,如果单纯采用迭代法获得的云高度为0.8 km,而投影处地形的地平高度约为1—1.3 km,这是不符合实际的,可以说地形是必须考虑的因素。如果考虑地形条件的话,则计算云高度为3.5 km。通过目视解译可以看出计算的结果与实际的阴影有很好的一致性。同时,将云高度设定为3.5 km而不考虑地形进行计算,结果则与实际的阴影有较大偏差,从图9所标注的阴影区域可以明显地看出。
同样对于8月11日数据如不考虑地形单纯采用迭代法获得的云高度为1 km,也是不符合实际的。如果考虑地形条件的话,则云高度为2.4 km。通过目视解译可以看出计算结果与实际阴影有很好的一致性,如图10中黄色圆圈所标注的几处区域。同时,如果将云高度设定为2.8 km而不考虑地形进行计算的话,结果也与目视解译的阴影有较大差别。
8月3日的数据,若不考虑地形单纯采用迭代法获得的云高度为1.4 km,如果考虑地形条件的话,则计算的云高度为4 km。通过目视解译可以看出计算的结果与实际的阴影有很好的一致性。同时,如果将云高度设定为4 km而不考虑地形进行计算的话,所得阴影区域与实际的阴影存在很大偏差。
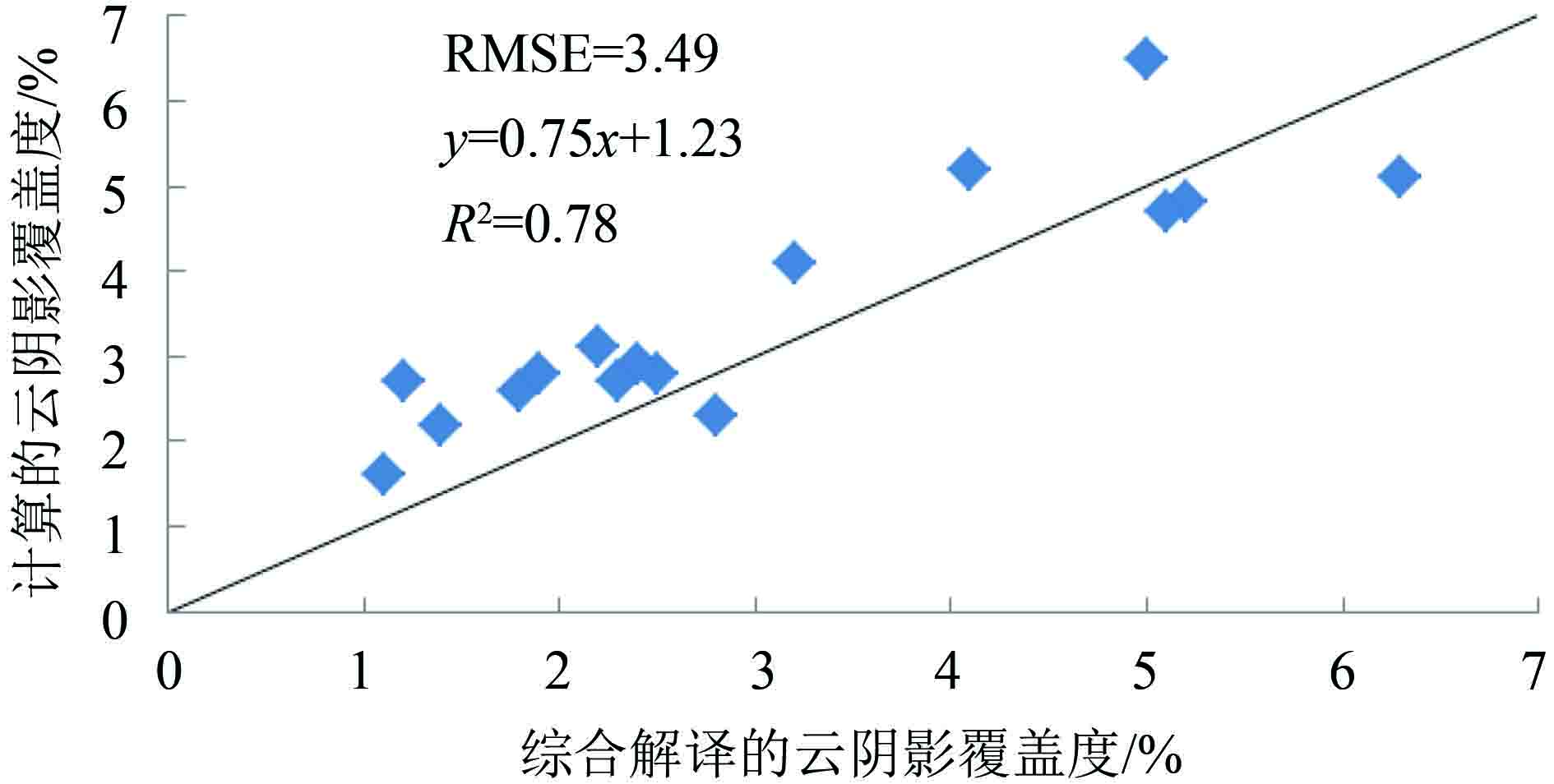
为了进一步论证计算结果的准确性,参考Zhu和Woodcock(2012)的方法,将目视和阈值法相结合得到综合解译的云阴影覆盖度,并与计算所得的云阴影覆盖度进行对比。图12为16景数据考虑地形的计算结果,直线为1∶1线。可以看出,其拟合效果较好,R2为0.78,RMSE为3.49。通过一系列模拟和实验发现本文所提出的算法能够很好地描述云阴影在复杂地表的畸变,实际计算与目视解译的阴影位置一致性较高,综合解译的覆盖度拟合效果较好,说明本文算法可以较为准确地计算复杂地形云阴影。同时也将未考虑地形计算的云阴影覆盖度进行了对比,如图13。可以看到计算的结果与解译分析的结果之间有较大差异,R2为0.12,RMSE也显著大于考虑地形的计算结果。

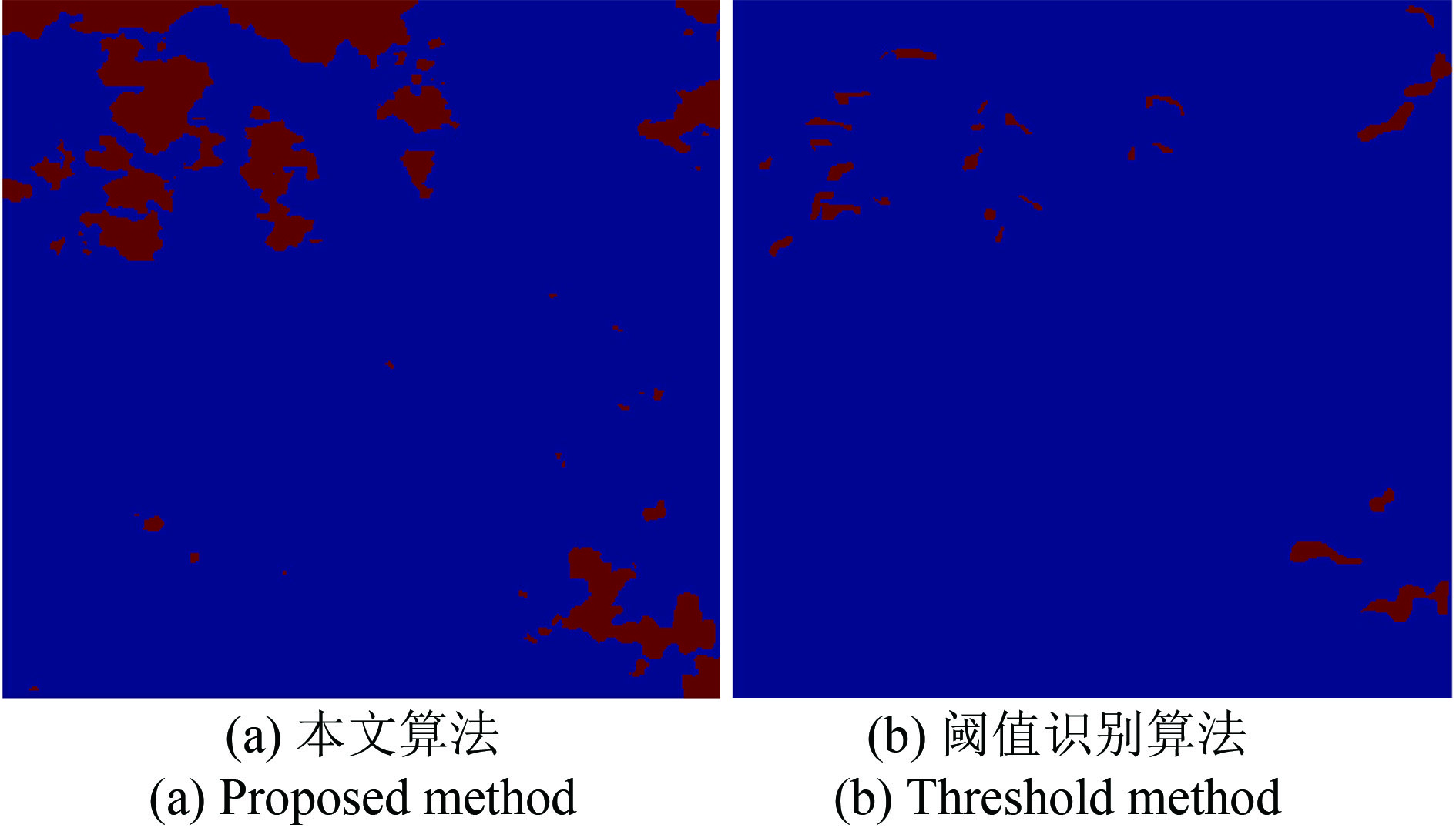
采用几何学方法可以克服阈值法检测云阴影只能基于图像本身的局限,将许多时候被云遮挡的阴影准确地计算出来,这对估算地表辐射具有重要意义,这样就可以准确区分地表的阴影区与非阴影区,进而可以采用不同算法估算地表辐射状况(Wyser 等,2002;张海龙 等,2010)。图14为本文算法所识别的云阴影与阈值识别的云阴影的结果,可以看出前者在全面识别云阴影方面具有明显优势。
5 结 论
云阴影的检测在遥感科学领域已经有许多的方法,如阈值法和时间序列法等。使用光谱阈值法会面临较多困难,如阈值的设定具有较大的不确定性,会受到许多因素的影响;而时间序列法需要耗费较多的机时,过程较为繁复。实际上,应用几何方法进行识别是较为准确且实用的方法。但是在应用几何学方法计算起伏地形下的云阴影的分布和变化方面仍较少有研究涉及,造成现在几何方法对于云阴影的识别方面仍有不足。因此,本文提出一种基于几何学方法的复杂地形条件下的云阴影识别方法,通过一系列模拟和实验发现所提出的算法在识别复杂地形条件云阴影方面具有较好的效果。其可以获取云像元对应的阴影在复杂地形的位置,对云阴影在复杂地表的畸变可以进行很好的描述。
云阴影计算的准确性会受到许多因素的影响。如云检测的准确性,一些较薄的云不易被检测,但这些云也可以在地面投射阴影,同时云的误检也会使计算结果出现偏差。另一方面,云高作为计算过程中的重要参数对结果有很大影响,但是准确的云高遥感数据信息的获取有一定困难,计算时多采用近似。实际上云的高度,特别是决定云阴影的边缘高度是具有差异性的,不同云块之间的高度也不同,这会造成云阴影识别上的差异。另外,DEM与可见光数据在匹配上也存在一定的偏差,对计算结果的准确性也会产生一定的影响。
参考文献(References)
-
Vittorio A and Emery W J. 2002. An automated dynamic threshold cloud-masking algorithm for daytime AVHRR images over land. IEEE Transactions on Geoscience and Remote Sensing, 40 (8): 1682–1694.
-
WyserKlaus . 2002. Remote sensing of surface solar irradiance with corrections for 3-D cloud effects. Remote Sensing of Environment., 80 (2): 272–284.
-
Goodwin N R, Collett L J, Denham R J, Flood N and Tindall D. 2013. Cloud and cloud shadow screening across Queensland, Australia: an automated method for Landsat TM/ETM+ time series. Remote Sensing of Environment, 134 : 50–65. [DOI: 10.1016/j.rse.2013.02.019]
-
Hutchison K D, Mahoney R L, Vermote E F, Kopp T J, Jackson J M, Sei A and Iisager B D. 2009. A geometry-based approach to identifying cloud shadows in the VIIRS cloud mask algorithm for NPOESS. Journal of Atmospheric and Oceanic Technology, 26 (7): 1388–1397. [DOI: 10.1175/2009JTECHA1198.1]
-
Knudby A, Latifovic R and Pouliot D. 2011. A cloud detection algorithm for AATSR data, optimized for daytime observations in Canada. Remote Sensing of Environment, 115 (12): 3153–3164. [DOI: 10.1016/j.rse.2011.07.001]
-
Liu R G and Yang L. 2013. Generation of new cloud masks from MODIS land surface reflectance products. Remote Sensing of Environment, 133 : 21–37. [DOI: 10.1016/j.rse.2013.01.019]
-
Liu X, Xu J M and Du B Y. 2005. A bi-channel dynamic threshold algorithm used in automatically identifying clouds on GMS-5 imagery. Journal of Applied Meteorological Science, 16 (4): 434–444. ( 刘希, 许健民, 杜秉玉. 2005. 用双通道动态阈值对GMS-5图像进行自动云检测. 应用气象学报, 16 (4): 434–444. )
-
Luo Y, Trishchenko A P and Khlopenkov K V. 2008. Developing clear-sky, cloud and cloud shadow mask for producing clear-sky composites at 250-meter spatial resolution for the seven MODIS land bands over Canada and North America. Remote Sensing of Environment, 112 (12): 4167–4185. [DOI: 10.1016/j.rse.2008.06.010]
-
SimpsonJ J, JinZ H and StittJ R. 2000. Cloud shadow detection under arbitrary viewing and illumination conditions. IEEE Transactions on Geoscience and Remote Sensing, 38 (2): 972–976. [DOI: 10.1109/36.841979]
-
SongX N and ZhaoY S. 2003. Cloud detection and analysis of MODIS image. Journal of Image and Graphics, 8 (9): 1079–1083. ( 宋小宁, 赵英时. 2003. MODIS图象的云检测及分析. 中国图象图形学报, 8 (9): 1079–1083. )
-
WangK C, ZhouX J and LiuJ M. 2004. The effects of complex terrain on the computed surface solar short-wave radiation. Chinese Journal of Atmospheric Sciences, 28 (4): 625–633. ( 王开存, 周秀骥, 刘晶淼. 2004. 复杂地形对计算地表太阳短波辐射的影响. 大气科学, 28 (4): 625–633. )
-
Wu Y, Yin Y, Shi C X, He L, Hu T T and Meng J Y. 2012. Validation of NOAA/AVHRR cloud detections by an automated dynamic threshold cloud-masking algorithm. Plateau Meteorology, 31 (3): 745–751. ( 武艳, 银燕, 师春香, 何立, 胡婷婷, 孟俊耀. 2012. 基于动态阈值法的NOAA系列卫星云检测结果检验. 高原气象, 31 (3): 745–751. )
-
WyserK Klaus. 2002. Remote sensing of surface solar irradiance with corrections for 3-D cloud effects. Remote Sensing of Environment, 80 (2): 272–284. [DOI: 10.1016/S0034-4257(01)00309-1]
-
YangC J, XuJ M and ZhaoF S. 2008. Application of time series in FY2C cloud detection. Journal of Atmospheric and Environmental Optics, 3 (5): 377–391. ( 杨昌军, 许健民, 赵凤生. 2008. 时间序列在FY2C云检测中的应用. 大气与环境光学学报, 3 (5): 377–391. )
-
Zhang H L, Liu G H, Yao L and Xie X P. 2010. Direct solar radiation simulation in all-weather and complex terrain conditions. Journal of Desert Research, 30 (6): 1469–1476. ( 张海龙, 刘高焕, 姚玲, 解修平. 2010. 复杂地形任意天气情形下太阳直接辐射量模拟. 中国沙漠, 30 (6): 1469–1476. )
-
Zhu Z and Woodcock C E. 2012. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sensing of Environment, 118 : 83–94. [DOI: 10.1016/j.rse.2011.10.028]
-
Zhu Z and Woodcock C E. 2014. Automated cloud, cloud shadow, and snow detection in multitemporal Landsat data: an algorithm designed specifically for monitoring land cover change. Remote Sensing of Environment, 152 : 217–234. [DOI: 10.1016/j.rse.2014.06.012]
-
Zhu Z, Wang S X and Woodcock C E. 2015. Improvement and expansion of the Fmask algorithm: cloud, cloud shadow, and snow detection for Landsats 4-7, 8, and Sentinel 2 images. Remote Sensing of Environment, 159 : 269–277. [DOI: 10.1016/j.rse.2014.12.014]


