{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Solutions to Forced and Unforced Lin–Reissner–Tsien Equations for Transonic Gas Flows on Various Length Scales
Cite this Article
Theaker Kyle A., Van Gorder Robert A.. Solutions to Forced and Unforced Lin–Reissner–Tsien Equations for Transonic Gas Flows on Various Length Scales. Communications in Theoretical Physics, 2017, 67(3): 309 
Permissions
Solutions to Forced and Unforced Lin–Reissner–Tsien Equations for Transonic Gas Flows on Various Length Scales
† Corresponding author. E-mail:
Abstract
Abstract
The Lin–Reissner–Tsien equation is useful for studying transonic gas flows, and has appeared in both forced and unforced forms in the literature. Defining arbitrary spatial scalings, we are able to obtain a family of exact similarity solutions depending on one free parameter in addition to the model parameter holding the scalings. Numerical solutions compare favorably with the exact solutions in regions where the exact solutions are valid. Mixed wave-similarity solutions, which describe wave propagation in one variable and self-similar scaling of the entire solution, are also given, and we show that such solutions can only exist when the wave propagation is sufficiently slow. We also extend the Lin–Reissner–Tsien equation to have a forcing term, as such equations have entered the physics literature recently. We obtain both wave and self-similar solutions for the forced equations, and we are able to give conditions under which the force function allows for exact solutions. We then demonstrate how to obtain these exact solutions in both the traveling wave and self-similar cases. There results constitute new and potentially physically interesting exact solutions of the Lin–Reissner–Tsien equation and in particular suggest that the forced Lin–Reissner–Tsien equation warrants further study.
1 Introduction
The Lin–Reissner–Tsien equation in dimensional units reads

This equation is used to study transonic gas flows under the transonic approximation.[1–3] Here 


For some applications, the equation

In the present paper, we shall consider the Lin–Reissner–Tsien equation on various length scales. We first non-dimensionalize the equation in Sec.
2 Non-Dimensionalization and Scaling Limits
Let us non-dimensionalize the Lin–Reissner–Tsien equation (

Here X, Y, T, U are constants holding the relative scales of each variable. As we are concerned with spatial scales, while temporal scales are less essential, we can pick the temporal scale to simplify the resulting non-dimensional equation, by taking 


Therefore, the Lin–Reissner–Tsien equation is reduced to a single equation on non-dimensional scales which depends only on a single scaling group. The spatial length scales are then all encoded in the single parameter ϵ, and it is sufficient to study (
If 



Introducing the new variables 

If 


This implies that

3 Similarity and Wave-Similarity Solutions for the Lin–Reissner–Tsien Equation
We now turn our attention to obtaining solutions to the scaled the Lin–Reissner–Tsien equation (
3.1 Similarity Transformation


11 ) reduces to
12 ), we obtain
Let us take the similarity transformation used in Ref. [5],

We obtain from Eq. (


Then, at such a singular point η = 1/2, the natural boundary condition would read
Hence, the boundary condition


We shall this be interested in solutions to the boundary value problem consisting of (
3.2 Exact Solutions to the Similarity Problem
Here we obtain exact solutions to the similarity ODE (

Then, placing this assumption into (


Leaving A fixed yet arbitrary, we can find B and C as such:

Thus,

Returning to physical coordinates, we have

The exact solution (

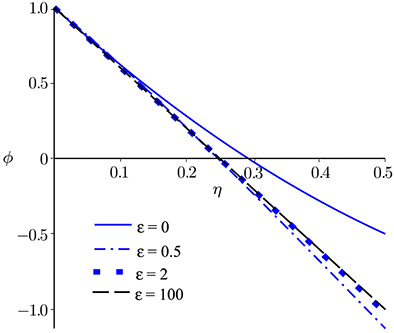
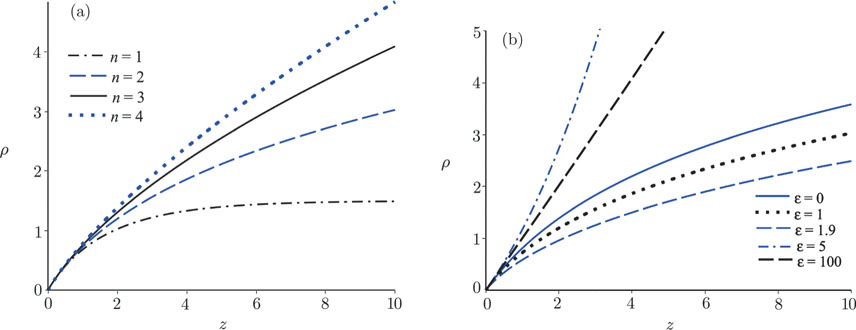
3.3 Numerical Solutions to Eqs. (11 ), (14 ), (16 )
With one class of exact solutions obtained, we now turn our attention to numerical solutions of the boundary value problem given by the ODE (
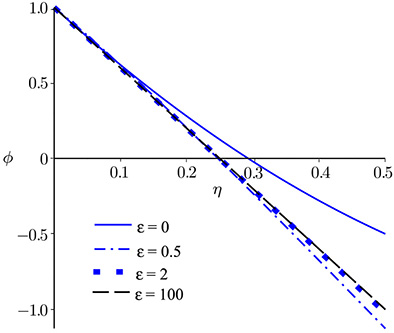 | Fig. 1 Plot of the numerical solutions of the boundary value problem given by the ODE ( |
3.4 Mixed Wave-Similarity Transforms

Let us consider a wave variable along the x direction; that is to say, z = x − ct. Such solutions were not considered in Ref. [5] or elsewhere. Then (

Consider a solution of the form 

Placing these into Eq. (

For this equation, we must have 2 + 2b = 0 and a + 2 + 3b = 0, which implies that a = 1 and b = −1. With these similarity parameters, we obtain

It is clear from the form of (
To find a second solution, let us consider the transformation 

In the limit where 

Returning to physical variables, we have

In the more interesting case where ϵ is not negligible, and to make this case more tractable we make the change of variable
This ODE permits an exact solution of the form
We then integrate this equation over σ to recover f(σ),
The arbitrary constant 

Interestingly, the solution (
Therefore, the solution exists only for 




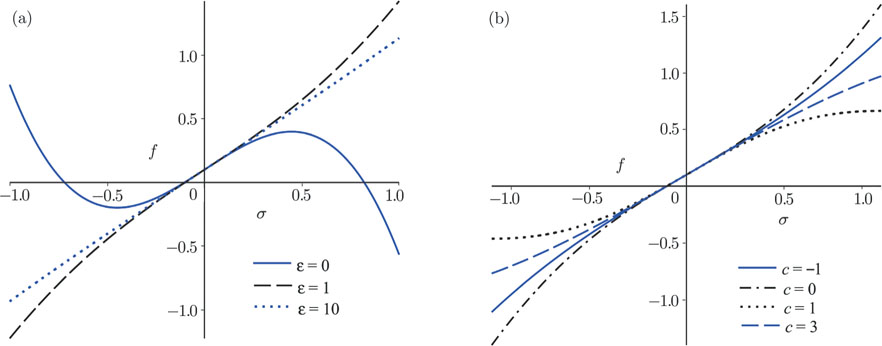
To conclude this section, we give numerical plots of the solutions to Eq.‘(
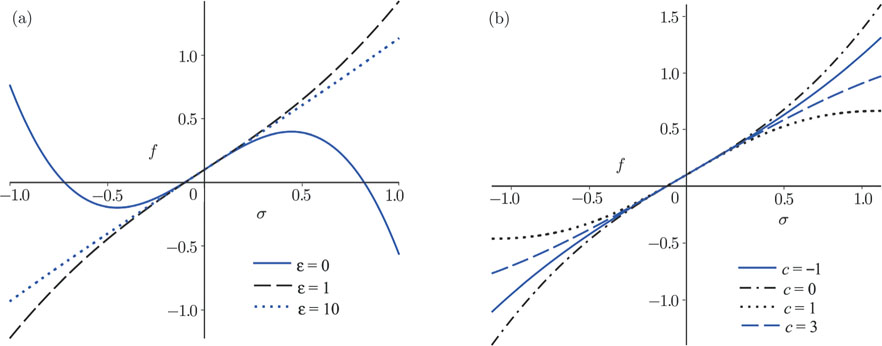 | Fig. 2 Plot of the numerical solutions to ( |
4 Lin–Reissner–Tsien Equation with Forcing Terms
Next we consider the forced Lin–Reissner–Tsien equation

4.1 F = F(u)
Let F = F(u). Consider a wave solution

Then, we obtain the ODE

If we multiply Eq. (

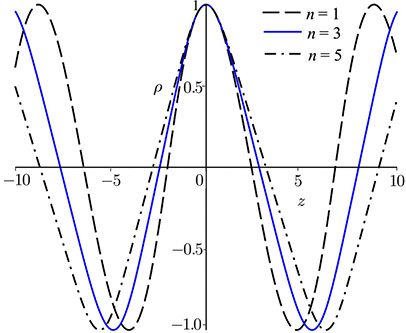
For various values of the parameters, we may plot the phase portraits in order to understand the behavior of solutions to this equation. On the other hand, we may directly solve the ODE (
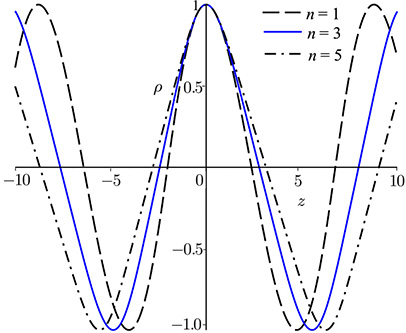 | Fig. 3 Plot of the numerical solutions to (  |
In the special case were 

Suppose that the force scales with a power of u, say 

4.2 

4 .
Consider now the case where the forcing function depends on the derivatives of u, say 


Separating variables in Eq. (
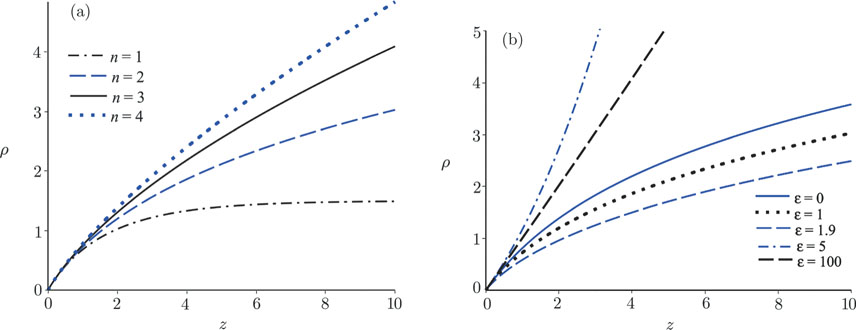
Consider the case where the force scales as a power of the first derivatives of u, so that we obtain 

 | Fig. 4 Plot of the numerical solutions to ( |
4.3 Forms of F which Permit Similarity Solutions10 ), we find that (38 ) reduces to
As discussed in Ref. [11], it is possible to have self-similar solutions to equations arising in gas dynamics, even when there is a forcing term present within the governing equation. We seek to find a general form of F = F(x, y, t) which still allows for a similarity solution.
Due to the similarity transform (


The right hand side of (

In other words, the permitted form of the force F is a power of the similarity variable, η, multiplied by a factor 

We numerically solve (
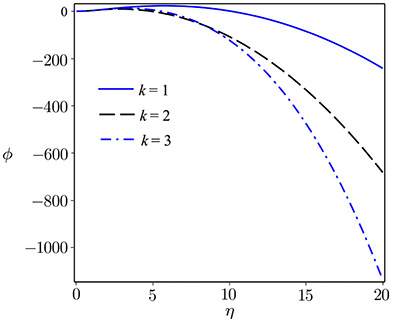
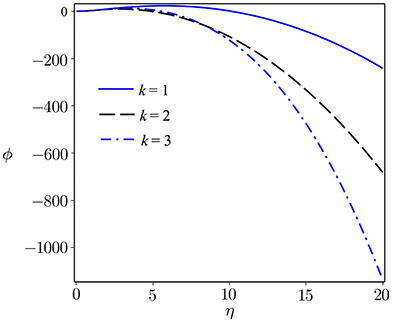 | Fig. 5 Plot of the numerical solutions to ( |
In addition to numerical solutions, note that it is also possible to obtain exact solutions for the similarity problem (
Here, the 



On the other hand, if 


We explicitly calculate the first few exact solutions, finding that for k = 0 we have



For k > 3, although solutions are theoretically possible due to order balances discussed above, when calculating the actual solutions we find that the equations for the coefficients in (

5 Conclusions
We have extended the results of Ref. [5] in several ways. First, we have found additional solutions to the Lin–Reissner–Tsien equation, including a somewhat more general similarity solution and new mixed wave-similarity solutions. We have also extended the Lin–Reissner–Tsien equation by considering a forcing term. Such forced equations are useful in the study of gas dynamics.[11] For the forced equation, we are able to study a variety of forcing functions, which permit either new wave or similarity solutions. Unlike for the standard Lin–Reissner–Tsien equation, the forced equation permits non-trivial wave solutions. It is interesting that, despite the added complexity due to the forcing term, the forced equation still permits similarity solutions, and for some cases can even still be solved exactly. We are able to determine precisely for which forcing functions exact polynomial solutions will exist. These results suggest that, while complicated, forced Lin–Reissner–Tsien equations can still be solved exactly under some circumstances. For all of the various solutions obtained, numerical simulations verify the behaviors observed in exact or perturbation solutions.
Many of the solutions only exist for certain parameters or parameter regimes. Therefore, some of the parameter values correspond to physically relevant solutions, while parameters for which there are no solution would correspond to a loss of validity of the transonic approximation, or more fundamentally, a breakdown of the transonic gas flow. In such a case, more complicated dynamics, such as turbulence, may arise, which is beyond the scope of the LRT equation. So, when there is a solution, this means that the physical parameters permit a “nice” solution to the transonic gas flow problem. The solutions in Subsec. 

The LRT equation with forcing term was also considered. While the precise form of forcing can be determined by the particular experiment at hand, we provide some examples to illustrate that solutions to forced LRT equations can exist. The form of the forcing term will strongly influence the dynamics of the LRT solutions. If the forcing function scales as a power of the unknown function, then we can expect periodic waves, with the frequency of the waves decreasing as the power of the function increases. Therefore, we have bounded, periodic transonic wave solutions for the gas in this regime. On the other hand, when the forcing function depends on one or more first derivatives of the unknown function, the transonic gas solutions are monotone increasing if we have traveling wave solutions. Therefore, the structure of the forcing term will strongly influence the behavior of traveling wave solutions.
Forced LRT equations also have solutions under a similarity transformation, assuming appropriate forcing term. In such a case, the solutions are highly sensitive to the strength of the nonlinearity in the forcing term. In this case, we also show that certain forcing functions, while theoretically possible, do not give closed-form similarity solutions. This again has to do with the fact that such poorly behaved forcing functions would likely cause breakdown of a solution over time, resulting in a transition to the turbulent regime.
The closed form solutions presented here cast light on when solutions to the LRT equations are possible. In other situations, solutions are not possible (or, not found), and this can indicate other behaviors, such as turbulence, which cannot be captured by the LRT model. Since the solutions have been non-dimensionalized, this means what solutions may be possible at some scales, while at other scales the solutions under the LRT transonic gas model will break down, giving way to turbulent gas dynamics. In particular, solutions always exist when ϵ = 0, and are found for small ϵ, as well. In terms of the space and time scales,




Reference
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] |