

|
收稿日期: 2017-11-16; 预印本: 2018-05-14
基金项目: 国家自然科学基金(编号:61501098);博士后面上基金(编号:2015M570778);中央高校科研基本业务费资助课题(编号:ZYGX2016KYQD107);高分青年基金项目(编号:GFZX04061502)
第一作者简介: 韦顺军,1983年生,男,副教授,研究方向为合成孔径雷达成像技术。E-mail:weishunjun@uestc.edu.cn
|
摘要
图像配准是实现干涉合成孔径雷达(InSAR)高精度相位提取及地形高程反演的关键,大场景图像的高效高精度配准成为近年高分宽幅InSAR成像应用研究的难点问题之一。由于大场景图像中不同区域偏移量及变化规律差异较大,传统最大相干系数配准方法需多分块及插值处理,面临计算量大且配准精度低等问题。针对此问题,本文提出一种基于DFT模型的大场景InSAR高效高精度图像配准算法。该方法利用最小均方差准则构建InSAR复图像配准的DFT模型,采用四叉树自适应分块及矩阵相乘DFT快速重采样配准方法,实现大场景InSAR图像各子块区域的高效高精度亚像素配准。仿真和实测数据验证本文算法的有效性,结果表明该算法不仅可实现大场景InSAR复图像亚像素级配准,还具有较高的运算效率,其运算效率相对于传统FFT配准方法通常可提升3倍以上。
关键词
遥感, 干涉合成孔径雷达, 复图像配准, 四叉树分割, 最大相干准则, DFT模型
Abstract
Image registration is key to high-resolution phase extraction and height inversion for interferometry synthetic aperture radar (InSAR). Recently, the registration method with high accuracy and efficiency has been one of the widely discussed issues in High-Resolution Wide-Swath (HRWS) InSAR applications. Different regions of a large scene will cause the pixel offsets of InSAR images to change dramatically. Traditional algorithms of InSAR image registration are based on maximum coherence require substantial block and interpolation processing, which may suffer from huge computational complexity and low precision. An efficient image registration algorithm for InSAR large scenes via DFT model is proposed in this study. In the scheme, a DFT model of InSAR complex image registration is constructed based on the minimum mean square error criteria. Then, the efficient sub-pixel registration for InSAR complex images is achieved via quadtree block and matrix multiplication DFT registration. Simulation and experimental results are presented to confirm the effectiveness of the algorithm. Results demonstrate that the algorithm can achieve subpixel image registration of InSAR large scenes and has high computational efficiency, usually more than thrice that of traditional FFT-based registration methods.
Key words
remote sensing, InSAR, complex image registration, quadtree block, maximum coherence criterion, DFT model
1 引 言
干涉合成孔径雷达InSAR(Interferometry Synthetic Aperture Radar)由于具备全天候、高精度、大区域成像、地形高程提取等优势,在地形测绘、地表形变检测、自然资源勘查、灾害监测、目标侦察等民用及军用领域具有非常重要的应用价值(Krieger 等,2010;Sato和Suzuki,2017),已经成为目前发展迅速、极具潜力的遥感对地观测及测绘技术之一。InSAR图像配准是将含有相同场景或目标的合成孔径雷达SAR(Synthetic Aperture Radar)图像进行空间几何对准的过程,是InSAR数据处理中最基础及关键的一个步骤,也是InSAR技术问世以来其数据处理的研究热点之一。为了提高InSAR复图像对的相干性,保证干涉相位质量及地形高程反演精度,InSAR复图像的配准精度通常要达到亚像素级别,实际中一般要求其配准精度达到八分之一像素以上(丁赤飚 等,2017)。
针对InSAR复图像的幅度及相位特性,通常利用相似性匹配测度来确定图像偏移量,至今已提出了基于最大相干系数(丁赤飚 等,2017)、最大干涉频谱(Scheiber和Moreira,2000)、相位平均波动函数(Zou 等,2009)、相位最小二乘(Liao 等,2004)等相似性匹配准则下多种复图像配准算法。相对其他匹配准则方法,最大相干系数配准方法由于可采用快速傅里叶变换FFT(Fast Fourier Transform)实现,具有更高的运算效率,是实现InSAR复图像快速配准最常用的方法。为了达到亚像素级配准精度,FFT最大相干系数配准算法通常采用插值重采样技术,一般插值单元尺寸越小,配准精度就越高。另外,结合一些新理论及应用,近年来也提出了多种InSAR亚像素度配准方法。Guizar-Sicairos 等(2008)提出一种高效图像配准算法,主要利用FFT变换矩阵相乘特性,实现图像快速插值及亚像素偏移估计。Li和Zhang(2012)提出一种快速偏移估计方法,利用图像特征估计及最小均方割算法实现高精度InSAR配准。Natsuaki和Hirose(2013)利用SAR图像奇异点作为评判准则,提出一种基于明暗恢复形状的InSAR配准算法。Zhang 等(2016)提出了基于复相干函数的大场景InSAR配准方法,采用图像固定子块划分配准以实现大场景InSAR复图像配准。Chen 等(2016)针对剧烈畸变及非相干图像对情况,提出一种基于SAR图像几何特征点信息的InSAR图像配准方法。Gong 等(2014)基于尺度不变特征变换及最大互信息准则,提出一种粗至精SAR图像自动配准方法。Dellinger 等(2015)提出一种基于类尺度不变特征变换的SAR复图像配准算法,有效克服了SAR图像相干斑对配准的影响。Zhu 等(2016)提出一种基于图像多特征检测及树状网络匹配的高精度配准算法。薛海伟和冯大政(2016)提出了一种图像连续函数优化的精配准方法,利用拟牛顿法来优化代价函数估计亚像素偏移量。然而,上述高精度配准算法通常将InSAR复图像进行整体配准,如Guizar-Sicairos 等(2008)提出的快速配准算法等;或者利用固定分块配准估计出像素偏移,通过建立偏移模型进行精配准,如Zhang 等(2016)提出了基于复相干函数方法等。在大场景InSAR成像中,受系统和观测地物影响,不同图像区域像素失配往往不同且变化复杂。此时,传统配准方法可能存在局部配准精度下降、运算量大等问题。特别是,随着近几年来高分宽带InSAR成像系统的成功研制,大场景InSAR图像数据与日俱增,如何实现大场景InSAR复图像的高效高精度配准成为亟待解决的问题。
针对大场景InSAR复图像的高精度高效率配准问题,本文结合复图像相干系数的离散傅里叶变换DFT(Discrete Fourier Transform)特性,提出一种基于DFT模型的高效高精度配准方法,主要通过四叉树图像分块及矩阵相乘DFT快速插值配准,提升大场景InSAR复图像的配准精度和效率。相对于传统FFT最大相干系数配准方法,该方法在实现亚像素配准时具有更低的计算复杂度。仿真和星载实测InSAR复图像配准实验验证了算法的有效性,结果表明该方法具有较低的运算量及良好的配准精度。
2 InSAR复图像配准
2.1 最大相干配准原理
假设
| $ {{r}}\left({x,y} \right) = \frac{{\sum\limits_{i = - {P / 2}}^{{P / 2}} {\sum\limits_{j = - {Q / 2}}^{{Q / 2}} {{{{f}}_1}\left({x + i,y + j} \right){{f}}_2^ * \left({x + i,y + j} \right)} } }}{{\sqrt {\sum\limits_{i = - {P / 2}}^{{P / 2}} {\sum\limits_{j = - {Q / 2}}^{{Q / 2}} {{{\left| {{{{f}}_1}\left({x + i,y + j} \right)} \right|}^2}} } } \sqrt {\sum\limits_{i = - {P / 2}}^{{P / 2}} {\sum\limits_{j = - {Q / 2}}^{{Q / 2}} {{{\left| {{{{f}}_2}\left({x + i,y + j} \right)} \right|}^2}} } } }} $ | (1) |
式中,
根据卷积函数特性,式(1)逐点滑窗得到的相干系数可转变为
| $ {{r}}\left({x,y} \right) = IFFT\left({FFT\left({{{{f}}_1}\left({x,y} \right)} \right) \odot FFT{{\left({{{{f}}_{\rm{2}}}\left({x,y} \right)} \right)}^ * }} \right) $ | (2) |
式中,
对于InSAR复图像亚像素精配准,FFT配准方法的主要思路为:先采用频域补零方法对图像插值;再采用FFT方法计算相干系数
2.2 大场景配准问题
根据传统FFT精配准原理,为了达到
另外,对于大场景InSAR观测成像,由于地距分辨率不均匀、观测地形起伏、基线状态不稳定、方位非直线运动等影响,通常其复图像中不同区域存在不同的像素偏移量及变化特性,直接利用传统FFT整体配准、固定分块配准方法或偏移建模方法难以实现大场景复图像的全局高精度配准。因此,为了提高大场景InSAR复图像的配准精度,需要更有效的处理方法对图像进行分块精配准处理。
3 DFT自适应配准算法
3.1 DFT高效高精度配准原理
DFT配准方法基本思想与传统FFT配准方法相似,区别为DFT方法可采用子区域插值及矩阵相乘DFT运算提高配准效率。假设InSAR复图像
| $ \begin{split} {{r}}\left({{x_0},{y_0}} \right) = &{{{f}}_1}\left({x,y} \right) \otimes {{f}}_2^ * \left({{x_0} - x,{y_0} - y} \right)= \\ & \sum\limits_{x,y} {{{{f}}_1}\left({x,y} \right){{f}}_2^ * \left({x - {x_0},y - {y_0}} \right)} =\\ & \sum\limits_{u,v} {{{{G}}_1}\left({u,v} \right){{G}}_2^ * \left({u,v} \right)\exp \left( {j2{\text{π}} \left({\frac{{u{x_{\rm{0}}}}}{M} + \frac{{v{y_0}}}{N}} \right)} \right)} \end{split} $ | (3) |
式中,
| $ \begin{split} \left({{{\hat x}_0},{{\hat y}_0}} \right) =& \mathop {\min }\limits_{{x_0},{y_0}} {\left\| {{{{f}}_1}\left({x,y} \right) - {{f}}_2 \left({x - {x_0},y - {y_0}} \right)} \right\|_2} \approx \\ & {\rm{1}} - \mathop {\max }\limits_{{x_0},{y_0}} \left| {{{r}}\left({{x_0},{y_0}} \right)} \right| \end{split} $ | (4) |
因此,DFT配准可等效于寻找主副图像的互相关
为了提高复图像相干系数的计算效率,本文利用矩阵相乘DFT变换仅仅对感兴趣区域插值,减少了相干系数计算所需图像区域,从而提升算法运算效率。假设一维离散信号
| $ {{F}}\left(u \right) = {\bf{D}}{{f}}\left(x \right) $ | (5) |
同理,对于一个2维信号
| $ {{F}}\left({u,v} \right) = {{{D}}_x}{{f}}\left({x,y} \right){{D}}_y^{\rm{T}} $ | (6) |
式中,
根据传统FFT配准方法,为使得
| $ {\tilde {{f}}_{\rm{1}}}\left({x,y} \right) = {{{U}}_x}{{\tilde{ F}}_1}\left({u,v} \right){{{U}}_y} = {{{U}}_{x{\rm{s}}}}{{{F}}_1}\left({u,v} \right){{{U}}_{y{\rm s}}} $ | (7) |
式中,
若复图像
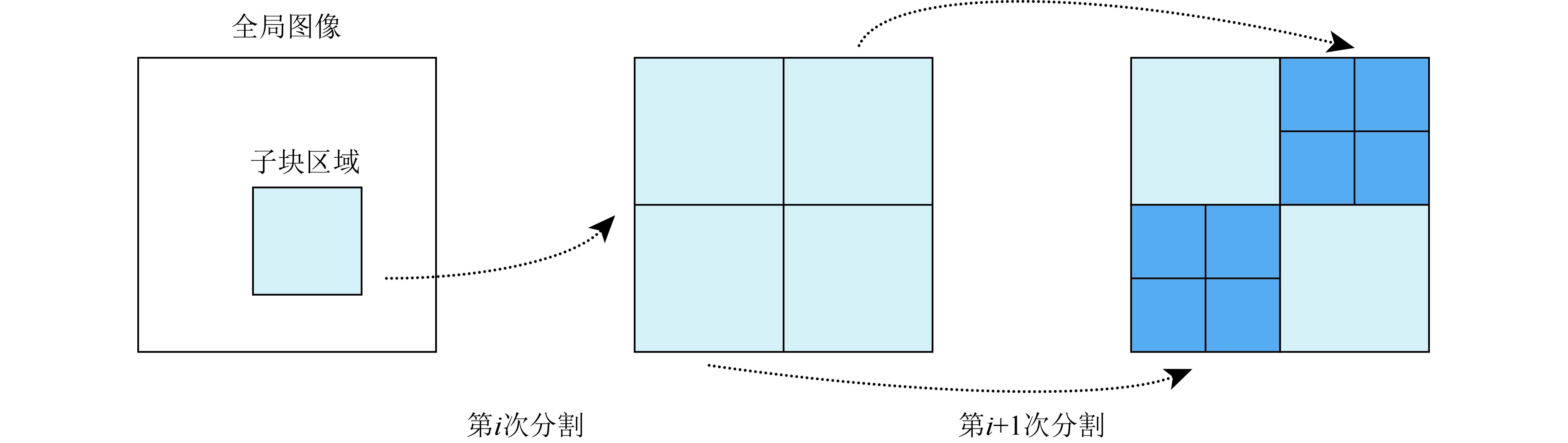
3.2 四叉树迭代分块配准
树结构是一种层迭形式数据结构,可将数据按层细分为多个类别,广泛应用于图像处理、空间数据索引的树形数据结构,且便于实现及并行计算。针对大场景InSAR复图像对中存在不同像素偏移及变化等问题,本文结合DFT高精度配准原理及四叉树结构特性,提出一种基于四叉树结构的迭代图像分块配准处理方法,通过子块内像素偏移指标作为判定条件,按照四叉树结构进行大场景InSAR图像迭代逐层分块配准,可减少分块数据并确保大场景图像不同区域的配准精度(图1)。若子块满足分块条件则继续四等分分块,否则该子块不再进行分块处理。

对于大场景InSAR复图像配准,为了达到
步骤1:粗分块。在
步骤2:初始化迭代分块的初始参数。设置迭代判定阈值
步骤3:四叉树迭代分块配准。对步骤2中所有子块
步骤4:合并各子块,得到最终
3.3 算法流程及运算量
根据3.1节DFT配准原理及3.2节四叉树迭代分块处理方法,本文基于DFT模型的大场景InSAR高效高精度配准算法主要包含两个步骤:图像粗配准和迭代分块精配准,具体流程如下:
步骤1:图像粗配准。将
步骤2:迭代分块精配准。对
从算法流程可知,步骤1计算复杂度约为
4 实验结果
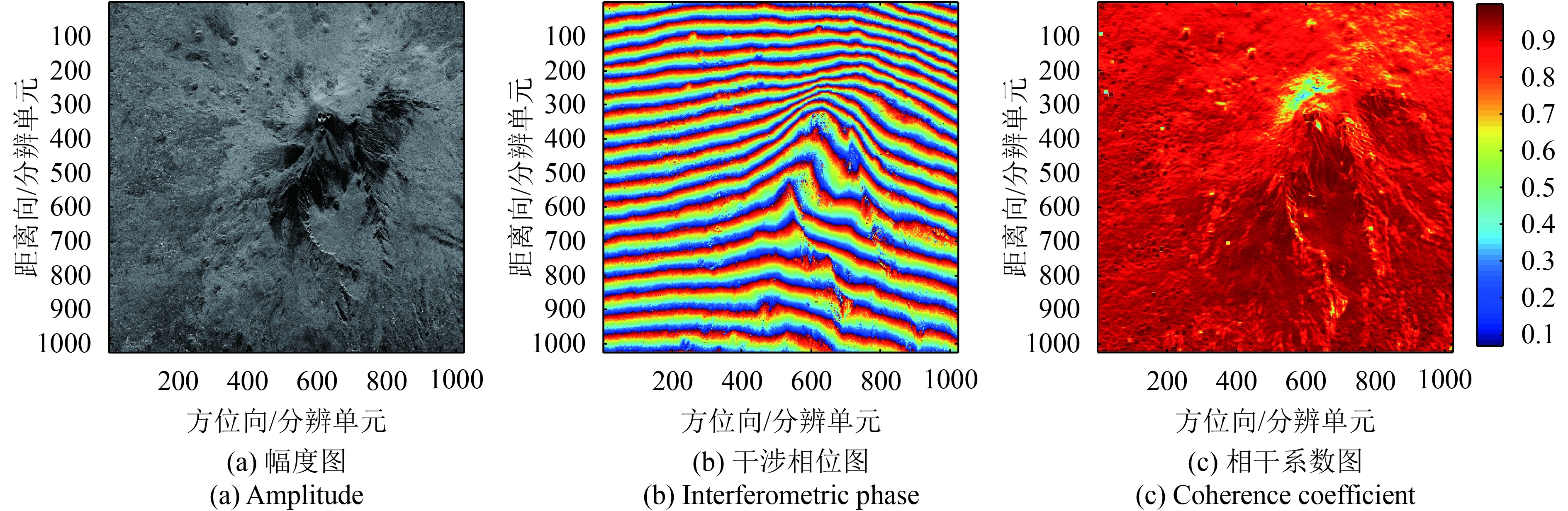
4.1 仿真数据
为了验证算法有效性,本节首先利用意大利Etna火山区域的ERS星载SAR图像及其地形高程图进行InSAR复图像仿真,得到的仿真InSAR主天线幅度及理想干涉相位图(图2),图像大小为1024×1024。对主图像按照子块进行像素偏移从而产生副图像,当主副图像间存在固定常数、线性变化、二次项变化及随机分布等不同偏移时,对比传统FFT最大相干系数配准方法(简称FFT法),分析本文配准方法的性能。其中,子块像素偏移方式是将主图像分成8×8均匀子块,不同子块间按照失配误差分布加入不同的像素偏移。仿真及配准处理中采用Matlab软件,计算机硬件条件:CPU为Intel Coreli7-6700(主频3.4 GHz),内存为32 G,显卡为Nvidia GTX1080。实验中本文算法阈值
另外,为了进一步定性比较配准方法性能,本文利用配准后图像的干涉相位均方误差MSE(Mean Square Error)、干涉相位梯度均值、干涉相位残差点数及相干系数均值等指标进行评价。
干涉相位MSE定义为
| ${{\hat {{\phi}}} _{MSE}} = {{\sqrt {\sum\limits_{n = 1}^N {\sum\limits_{m = 1}^M {{{\left| {{{{\hat {{\phi}}} }_{m,n}} - {{{\phi}} _{m,n}}} \right|}^{\rm{2}}}} } } } {\Bigg/ }{\sqrt {\sum\limits_{n = 1}^N {\sum\limits_{m = 1}^M {{{\left| {{{{\phi}} _{m,n}}} \right|}^{\rm{2}}}} } } }}$ | (8) |
式中,
干涉相位梯度均值定义为
| ${{\hat {{\phi}}} _\Delta } = {{\sum\limits_{n = {\rm{2}}}^N {\sum\limits_{m = {\rm{2}}}^M {\left( {\left| {{\Delta _x}\left({{{{\hat {{\phi}}} }_{m,n}}} \right)} \right| + \left| {{\Delta _y}\left({{{{\hat {{\phi}}} }_{m,n}}} \right)} \right|} \right)} } }{\Big/ } {\left({M - 1} \right)}}\left({N - 1} \right)$ | (9) |
式中,
干涉相位残差点定义为
| ${Q_{m,n}} = \sum\limits_{i = 1}^4 {{\Delta _i}} = \left\{ {\begin{array}{*{20}{c}} 0&{\text{非残差点}}\\ { \pm 1}&{\text{残差点}} \end{array}} \right.$ | (10) |
| ${{\hat {{\phi}}} _{\rm{RES}}} = \sum\limits_{n = 1}^N {\sum\limits_{m = 1}^M {{Q_{m,n}}} } $ | (11) |
式中,相位梯度
相干系数均值定义为
| ${\gamma _{mean}} = {{\sum\limits_{n = 1}^N {\sum\limits_{m = 1}^M {\left| {{{\hat {{r}}}_{m,n}}} \right|} } }/ {MN}}$ | (12) |
式中,相干系数
当仿真InSAR主副图像间存在

进一步定量对比本实验中3种配准方法的性能,表1给出了图3共3种配准方法所得到的干涉相位残差点数、相位均方误差、相位梯度均值、相干系数均值等评价指标计算结果,其中原始无失配主副图像的干涉相位残差点数为2136,相位梯度均值为0.733,相干系数均值为0.967。当主副复图像间存在亚像素整体偏移时,3种方法图像配准结果各性能指标差异很小,配准性能相当(表1);当不同区域存在不同偏移量时,传统FFT整体配准方法失效,但本文方法得到的干涉相位残差点数、MSE、相干系数均值等指标均优于传统FFT固定分块配准方法,验证了本文方法的有效性。
表 1 3种配准方法在仿真数据的性能比较
Table 1 Performance comparison of three kinds of registration methods in simulation data
| 偏移情况 | 方法 | 评价指标 | |||
| 干涉相
位MSE |
残差
点数 |
相干系
数均值 |
相位梯
度均值 |
||
| 整体偏移 | FFT方法1 | 0.654 | 6859 | 0.956 | 1.033 |
| FFT方法2 | 0.683 | 9578 | 0.948 | 1.167 | |
| 本文方法 | 0.641 | 6102 | 0.959 | 0.926 | |
| 线性偏移 | FFT方法1 | 1.243 | 181304 | 0.473 | 3.171 |
| FFT方法2 | 0.778 | 25621 | 0.912 | 1.531 | |
| 本文方法 | 0.709 | 16237 | 0.934 | 1.239 | |
| 二次项偏移 | FFT方法1 | 1.181 | 152032 | 0.565 | 2.974 |
| FFT方法2 | 0.848 | 43834 | 0.871 | 1.811 | |
| 本文方法 | 0.709 | 15076 | 0.934 | 1.242 | |
| 随机偏移 | FFT方法1 | 1.083 | 124237 | 0.682 | 2.784 |
| FFT方法2 | 0.953 | 72070 | 0.805 | 2.266 | |
| 本文方法 | 0.732 | 19183 | 0.925 | 1.349 | |
为了进一步对比大场景图像时所提配准方法的运算效率,增大图2中原始仿真图像维数,且像素偏移情况与图3相同,配准算法均采用10倍插值,算法参数设置同图3,FFT分块配准方法采用8×8。表2给出不同图像大小情况下3种配准方法的平均运算时间,其中符号“—”表示计算机内存已溢出无法完成配准。传统FFT整体配准方法在图像维数为4096×4096时,计算机内存溢出无法实现配准(表2);而本文方法平均运算时间明显小于传统FFT整体配准方法及8×8分块配准,通常运算效率可提高3倍以上。而且,图像对间偏移形式越简单,本文方法运算时间越少,其原因是偏移形式复杂时,本文方法自适应分块数就越多,各子块配准总的运算时间会增加。
表 2 3种方法配准运算时间比较
Table 2 Comparison of three methods of registration operation time
| 方法 | 图像大小 | |||
| 2048×2048 | 4096×4096 | 8192×8192 | 16384×16384 | |
| FFT方法1 | 43.46 | — | — | — |
| FFT方法2 | 39.55 | 162.39 | 671.23 | 2953.48 |
| 本文方法
(整体偏移) |
0.84 | 3.69 | 15.22 | 64.45 |
| 本文方法
(线性偏移) |
2.48 | 11.32 | 44.61 | 187.38 |
| 本文方法
(二次项偏移) |
8.17 | 34.94 | 164.76 | 714.26 |
| 本文方法
(随机偏移) |
8.91 | 37.15 | 176.84 | 765.07 |
4.2 实测数据
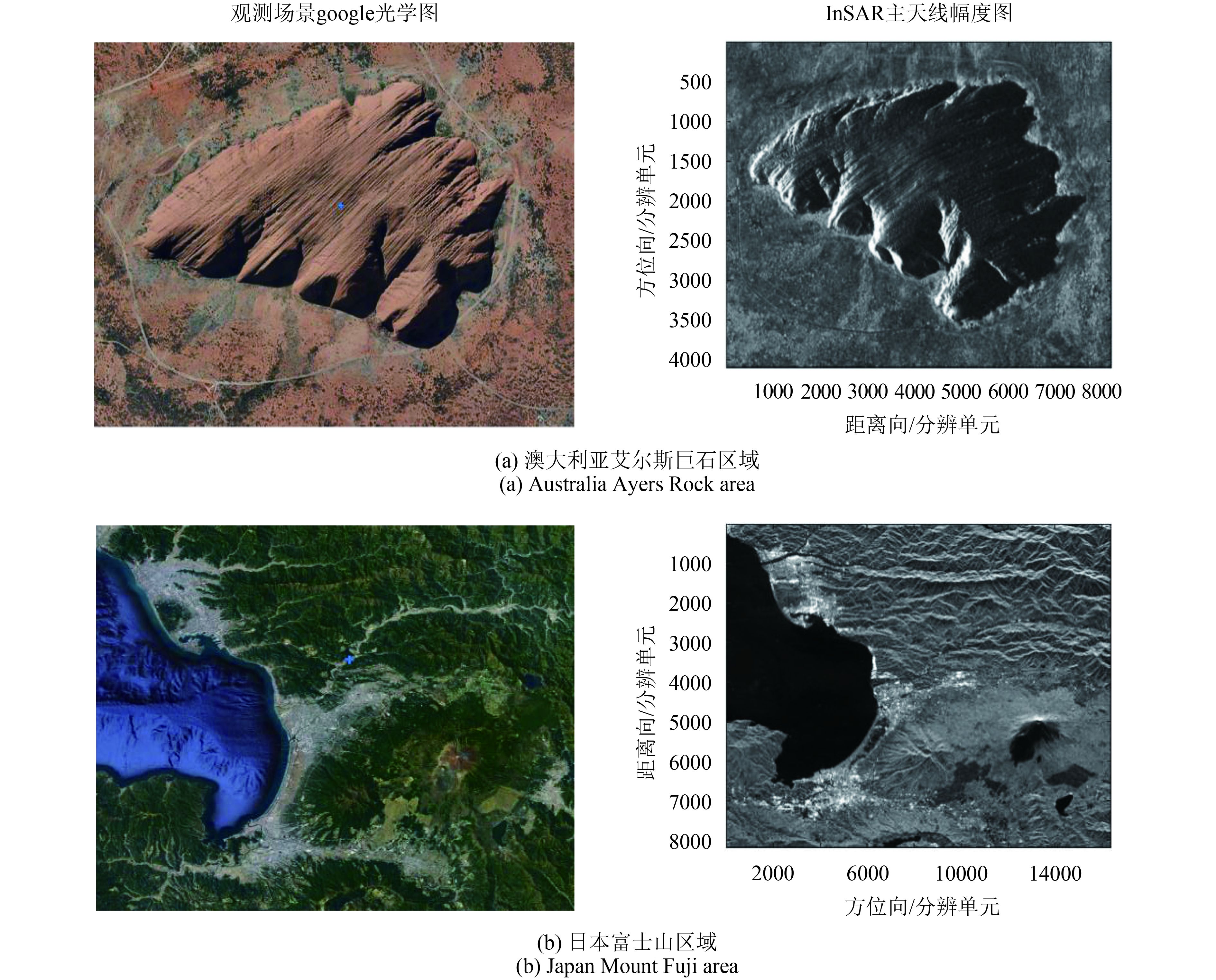
为了进一步验证配准算法有效性,本节利用星载InSAR实测复图像数据进行配准处理分析。图4分别为星载TerrSAR获取的澳大利亚艾尔斯巨石区域InSAR复图像数据、星载PALSAR获取的日本富士山区域InSAR复图像数据的google光学图及主天线幅度图。其中,艾尔斯巨石区域InSAR复图像大小为4096×8192,主要包括了陡变岩石山体、缓变地面等区域;日本富士山区域InSAR复图像大小8192×16384,主要包括了起伏山地、海面、城市等区域。因此,两组图像中存在一些低相干区域,如海面、阴影、山地等区域,此处难以得到干涉相位。实验中本文算法阈值
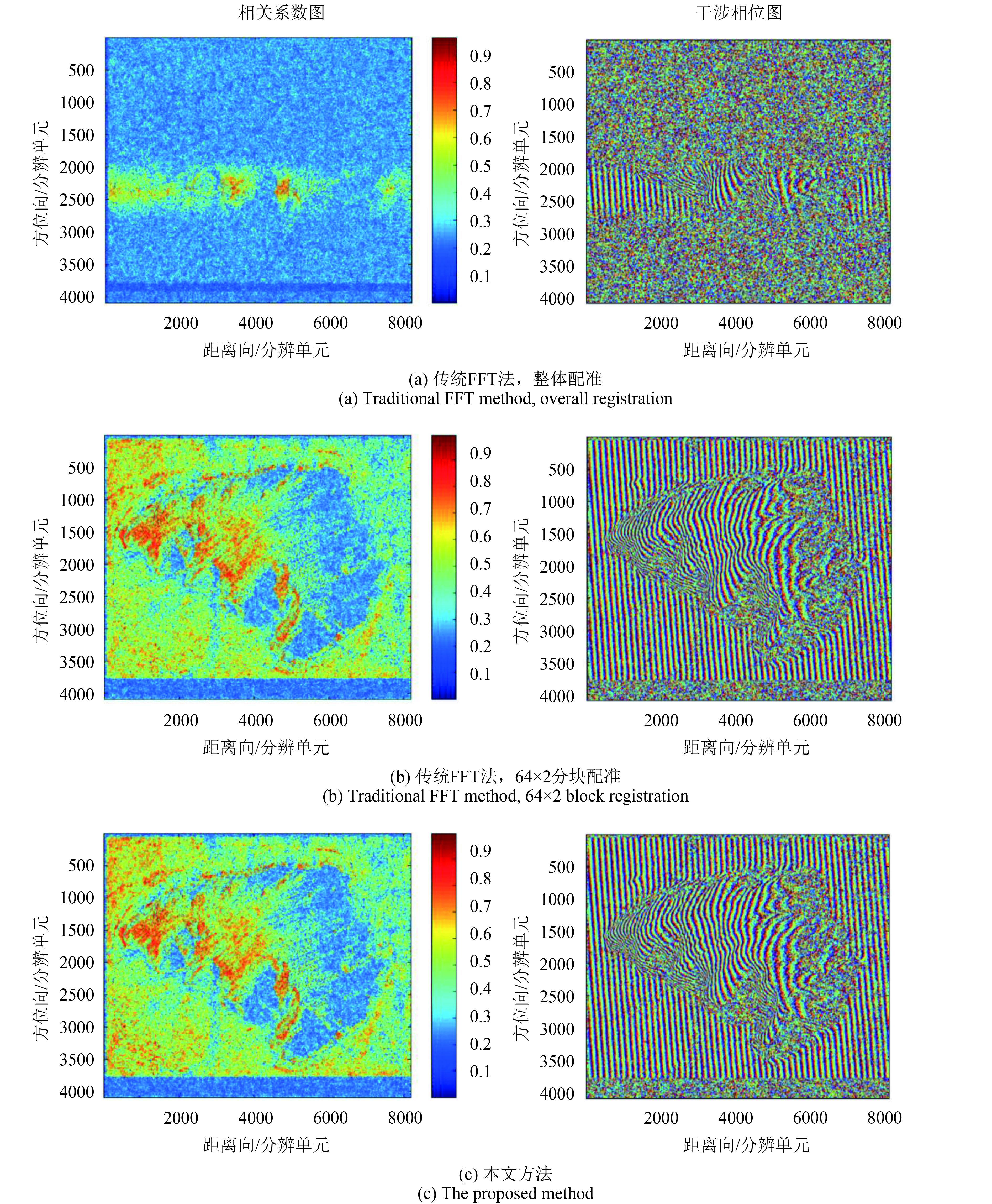
对于图4(a)的艾尔斯巨石区域InSAR复图像,图5给出了传统FFT配准方法和本文算法配准后得到的相干系数及干涉相位结果,其中图5(a) FFT方法采用整体像素级配准,图5(b)和(c)中采用10倍插值使得配准精度达到0.1像素级。从图5配准结果可知,图5(a)复图像整体配准时仅能获得方位向局部区域及对应所有距离向的干涉相位条纹,此区域相干系数较高,而无干涉相位区域相干系数很小,说明该InSAR图像中不同方位向像素偏移不同,而距离向像素偏移不大;图5(b)中FFT配准方法采用64×2分块处理,平均运行时间为844.67 s,而图5(c)中本文方法平均运行时间为52.84 s,但两种方法相干系数及干涉相位条纹基本相当。相对于图5(a),传统FFT分块方法及本文方法均能获得全局图像的干涉相位,提升了主副图像配准的相干系数,而本文方法运算效率明显优于传统FFT分块处理,其运算效率提升了1个数量级,更有利于InSAR大场景图像配准快速处理。另外,本文方法与传统FFT相似,在低相干目标区域难以获得较好的干涉相位。
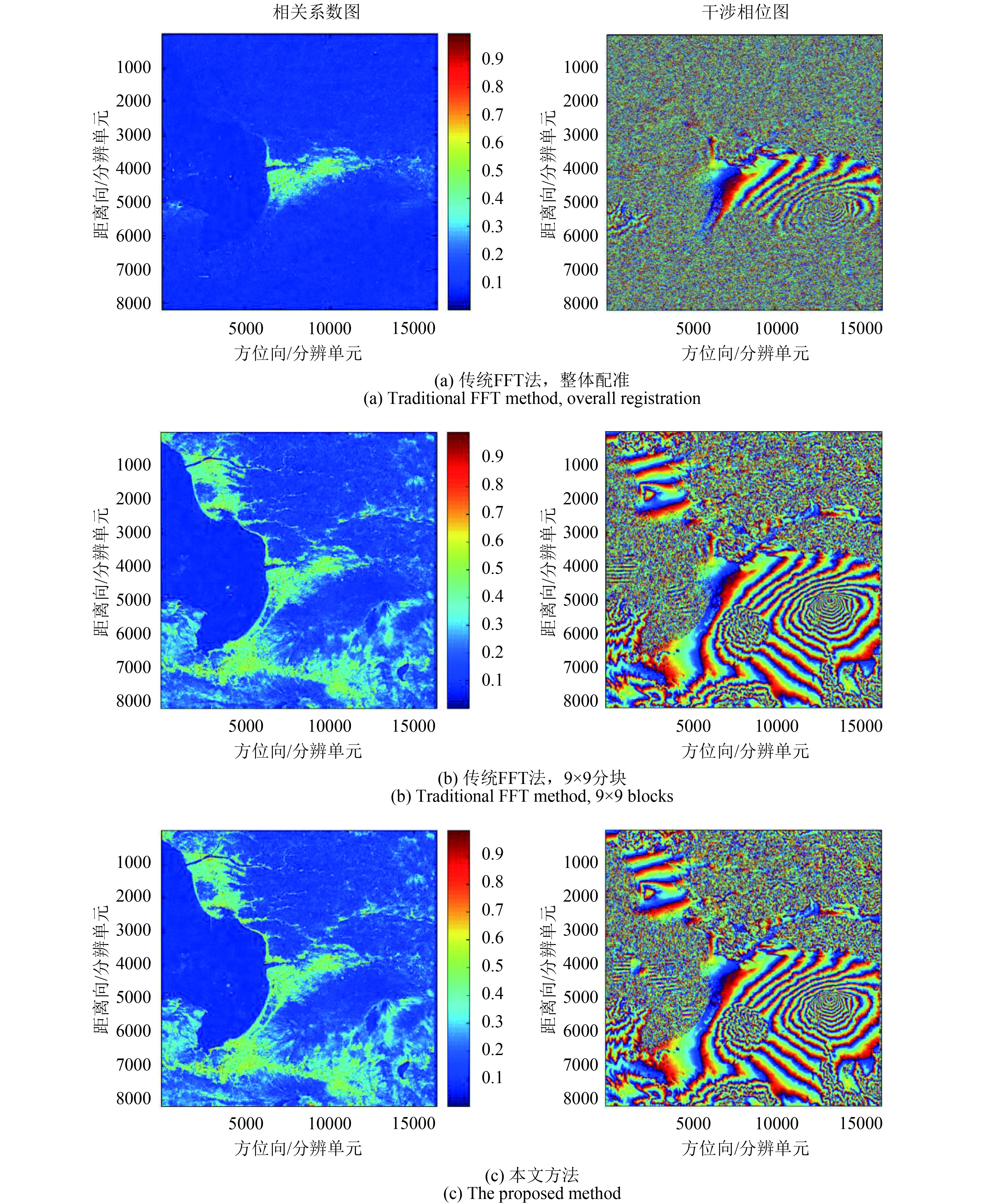
对于图4(b)的富士山区域InSAR复图像,图6给出了传统FFT配准方法和本文算法配准后得到的相干系数及干涉相位图,同样图6(a) FFT方法采用整体像素级配准,图6(b)和图6(c)中采用10倍插值使得配准精度达到0.1像素级,并且为了突出地形变化及相位条纹质量,图中干涉相位已完成相同平地效应去除及滤波处理。从图6可知,该InSAR主副图像在不同方位向和距离向区域均存在不同偏移量,整体配准不能获取全局图像的干涉相位;图6(b)中FFT配准方法采用9×9分块处理,平均运行时间为2018.72 s,可获得全局图像高相干区域的干涉相位;本文方法平均运行时间为59.88 s,获取的相干系数及干涉相位与FFT方法9×9分块配准处理基本相同,说明本文方法可实现高精度复图像配准,同时运算效率相对于传统FFT方法提升了近2个数量级,大大提高了InSAR图像配准运算效率。
为了对比实测数据实验中3种配准算法的性能,本文计算了图5和图6两组星载InSAR实测数据采用传统FFT方法及本文配准方法结果对应的干涉相位残差点数、干涉相位梯度均值及相干系数均值等性能指标(表3),其中FFT方法1表示传统FFT方法整体配准,FFT方法2表示传统FFT方法分块配准。从表3可知,对于两组星载InSAR实测复图像,本文方法因采用DFT模型配准及四叉树分块处理,在干涉相位残差点数、干涉相位梯度均值及相干系数均值等性能指标均优于FFT方法1及FFT方法2。因此,相对于固定分块配准处理,实验中本文方法通过迭代四叉树分割处理可提高InSAR大场景图像局部区域的配准精度,进一步验证了本文方法在InSAR大场景复图像高精度配准的有效性。
表 3 3种配准算法在星载InSAR实测数据复图像的性能比较
Table 3 Performance comparison of spaceborne InSAR experimental image with three registration algorithms
| 数据 | 方法 | 评价指标 | ||
| 残差
点数 |
相干系
数均值 |
相位梯
度均值 |
||
| 艾尔斯巨石
InSAR数据 |
FFT方法1 | 128007 | 0.2768 | 0.5996 |
| FFT方法2 | 52598 | 0.4476 | 0.4018 | |
| 本文方法 | 50282 | 0.4614 | 0.3897 | |
| 富士山InSAR
数据 |
FFT方法1 | 514229 | 0.1022 | 0.6159 |
| FFT方法2 | 208547 | 0.2261 | 0.3239 | |
| 本文方法 | 200273 | 0.2933 | 0.3171 | |
5 结 论
大场景InSAR复图像对的像素失配误差形式往往较复杂,不同图像区域的失配量可能完全没有规律,传统FFT配准方法处理时会面临运算量大、局部区域配准精度不足等问题。针对此问题,本文提出了一种基于DFT模型的大场景InSAR高效高精度图像配准算法。该方法主要利用最小均方差准则构建InSAR复图像配准的DFT模型,采用四叉树自适应分块及DFT矩阵相乘快速重采样配准方法,实现大场景InSAR图像各子块区域的高效高精度亚像素配准。仿真和实测数据结果验证了算法的有效性,表明该方法相对传统FFT最大相干系数配准方法不仅可实现大场景InSAR复图像的亚像素级配准,还具有较高的运算效率,其运算效率通常可以提升3倍以上,且InSAR图像对间偏移形式复杂时运算时间会相应增加。后续可对算法中四叉树配准阈值进行研究,如采用自适应阈值或其他阈值指标,进一步提升算法的配准性能。
参考文献(References)
-
Chen Z W, Zhang L and Zhang G. 2016. An improved InSAR image co-registration method for pairs with relatively big distortions or large incoherent areas. Sensors, 16 (9): 1519 [DOI: 10.3390/s16091519]
-
Dellinger F, Delon J, Gousseau Y, Michel J and Tupin F. 2015. SAR-SIFT: a SIFT-like algorithm for SAR images. IEEE Transactions on Geoscience and Remote Sensing, 53 (1): 453–466. [DOI: 10.1109/TGRS.2014.2323552]
-
Ding C B, Li F F, Hu D H and You H J. 2017. Data Processing Technology of Airborne InSAR. Beijing: Science Press (丁赤飚, 李芳芳, 胡东辉, 尤红建. 2017. 机载干涉合成孔径雷达数据处理技术. 北京: 科学出版社)
-
Gong M G, Zhao S M, Jiao L C, Tian D Y and Wang S. 2014. A novel coarse-to-fine scheme for automatic image registration based on SIFT and mutual information. IEEE Transactions on Geoscience and Remote Sensing, 52 (7): 4328–4338. [DOI: 10.1109/TGRS.2013.2281391]
-
Guizar-Sicairos M, Thurman S T and Fienup J R. 2008. Efficient subpixel image registration algorithms. Optics Letters, 33 (2): 156–158. [DOI: 10.1364/OL.33.000156]
-
Krieger G, Hajnsek I, Papathanassiou K P, Younis M and Moreira A. 2010. Interferometric synthetic aperture radar (SAR) missions employing formation flying. Proceedings of the IEEE, 98 (5): 816–843. [DOI: 10.1109/JPROC.2009.2038948]
-
Li D and Zhang Y H. 2012. A fast offset estimation approach for InSAR image subpixel registration. IEEE Geoscience and Remote Sensing Letters, 9 (2): 267–271. [DOI: 10.1109/LGRS.2011.2166752]
-
Liao M S, Lin H and Zhang Z X. 2004. Automatic registration of InSAR data based on Least-square matching and multi-step strategy. Photogrammetric Engineering and Remote Sensing, 70 (10): 1139–1144. [DOI: 10.14358/PERS.70.10.1139]
-
Natsuaki R and Hirose A. 2013. InSAR local co-registration method assisted by shape-from-shading. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6 (2): 953–959. [DOI: 10.1109/JSTARS.2012.2219506]
-
Sato H P and Suzuki A. 2017. Landslide surface deformation detected by synthetic aperture radar (SAR) interferometry in Shizu Area on the Southern Foot of Mt. Gassan, Japan//Yamagishi H and Bhandary N P, eds. GIS Landslide. Tokyo: Springer: 31-44 [DOI: 10.1007/978-4-431-54391-6_3]
-
Scheiber R and Moreira A. 2000. Coregistration of interferometric SAR images using spectral diversity. IEEE Transactions on Geoscience and Remote Sensing, 38 (5): 2179–2191. [DOI: 10.1109/36.868876]
-
Xue H W and Feng D Z. 2016. Analytic offset search method for InSAR image precise registration. Systems Engineering and Electronics, 38 (8): 1787–1793. ( 薛海伟, 冯大政. 2016. 解析搜索偏移量的InSAR图像精配准方法. 系统工程与电子技术, 38 (8): 1787–1793. )
-
Zhang Z C, Liu H, Zhang L, Wang S, Li Z Z and Wu J J. 2016. A large width SAR image registration method based on the compelex correlation function//Proceedings of 2016 IEEE International Geoscience and Remote Sensing Symposium. Beijing: IEEE: 6476-6479 [DOI: 10.1109/IGARSS.2016.7730692]
-
Zhu H, Ma W P, Hou B and Jiao L C. 2016. SAR image registration based on multifeature detection and arborescence network matching. IEEE Geoscience and Remote Sensing Letters, 13 (5): 706–710. [DOI: 10.1109/LGRS.2016.2539207]
-
Zou W B, Li Y, Li Z L and Ding X L. 2009. Improvement of the accuracy of InSAR image co-registration based on tie points–A review. Sensors, 9 (2): 1259–1281. [DOI: 10.3390/s90201259]


