

|
收稿日期: 2017-09-14; 预印本: 2018-03-16
基金项目: 国家重点研发计划(编号:2017YFD0600404);国家重点基础研究发展计划(973计划)(编号:2013CB733404)
第一作者简介: 马振宇,1993年生,男,研究方向为激光雷达林业应用。E-mail:mazhenyu22@163.com
|
摘要
本文利用地基激光雷达实现天然林区近地面点云数据的精细分类和倒木提取。对大兴安岭天然林区的3个倒木样地进行了近地面1.3 m以内点云精细分类和倒木信息提取。为避免点云密度差异和遮挡的形态特征,点云分类时基于自适应临近搜索法计算团块协方差特征值构造3D和2D特征。使用k临近递增的团块协方差特征值得到的线性特征、面状特征和发散状特征构造最大熵函数,用最大熵函数取得最大值时的临近点云计算特征参数,根据递归特征排除法(RFE)筛选重要变量进行随机森林分类。利用自适应kNN特征得到3块研究样地(A、B、C)的分类总体精度分别为93.17%、94.52%、95.16%;固定k临近搜索时,总体精度分别为92.65%、89.09%、92.99%,表明自适应kNN搜索方法使分类精度有一定提高。提取倒木点云去噪处理后进行随机抽样一致圆柱拟合,根据轴线方向进行圆柱的筛选与合并,实现倒木的识别,样地倒木识别率为100%。
关键词
地基激光雷达, 点云, 倒木, 随机森林分类, 随机抽样一致
Abstract
Terrestrial Laser Scanning (TLS) can effectively describe complex forest scenes. This study aimed to classify ground point cloud within the height of 1.3 m into ground, vegetation, fallen wood, and standing trunk based on the TLS obtained from fallen wood plots in Daxing’anling. Fallen wood cloud point was segmented and merged. The optimal 3D neighborhood of each individual point was calculated through the Shannon entropy constructed by linearity, planarity, and scattering to avoid the difference in cloud density and the morphological characteristics introduced by occlusion. Shannon entropy could be maximized across the increasing kNN with an interval of 5 points. The optimal neighborhood size was used to compute the covariance eigenvalues for constructing 3D and 2D features. Key features were selected following the recursive feature elimination criteria, and a random forest classification algorithm was used to classify the points. Noise removal approach was applied to the fallen wood points classified by self-adjusting kNN features, and random sample consensus (RANSAC) segmentation was implemented to segment cylinders. Fallen wood cylinders were selected and merged depending on the axis direction less than 12° and the distance less than 0.1 m between each other. The overall classification accuracies of self-adjusting kNN method in plots A, B, and C were 93.17%, 94.52%, and 95.16%, respectively, and corresponding Kappa coefficients were 0.8771, 0.9145, and 0.9242, respectively. The overall accuracies of non-self-adjusting kNN were 92.65%, 89.09%, and 92.99%, and the Kappa coefficients were 0.8684, 0.8909, and 0.9299. Point cloud of plots B and C was classified using the model we trained using plot A. The classification accuracies of plots B and C were 62.38% and 59.80%, and the user precisions of fallen wood point cloud were 79.31% and 48.06%. All fallen woods had the same number as the ground measurement, and the parameters of fallen wood could be estimated roughly. Compared with the non-self-adjusting kNN method, the near-ground point cloud classification accuracy was improved by the self-adjusting kNN point cloud feature. Classification of plots B and C using the training result of plot A suggested that the selected key features in the complex forest could explain the dependent variable well. RANSAC could effectively segment the cylinder and estimate the parameters of the fallen wood. This research is significant for extracting parameters of the existing work. Further ecological research will be considered accordingly.
Key words
Terrestrial Laser Scanning (TLS), point cloud, fallen wood, random forest classification, Random Sample Consensus (RANSAC)
1 引 言
倒木(Fallen Wood)是森林生态系统的重要组成部分,对维持森林生态系统物种多样性以及林木更新有着不可忽略的作用(Carmona 等,2002)。森林倒木的研究主要针对林木的死亡、倒木碳储量、倒木动态分解、倒木天然更新等陆续开展(Cornaby和Waide,1973;Pyle和Brown,1999;Rubino和McCarthy,2003;辛魏巍,2012)。森林倒木与地表枯落物水含量较低,是森林火灾的重要可燃物,Rowell等(2016)提出在环境复杂的森林中,倒木、低矮灌木和枯落物混杂的林下地表更容易引发火灾。Sandberg等(2006)将倒木作为重要因子输入FCCS(Fuel Characteristic Classification System)模型评估林火等级。森林垂直结构是森林生态系统的重要参数,倒木结构的提取对提高森林生物量估测精度、开展森林演替、碳循环、初级生产力的研究具有重要意义(Yang 等,2002;娜丽,2015)。
激光雷达LiDAR(Light Detection And Ranging)技术是近20年来迅速发展的主动遥感技术。与被动光学遥感工作机制不同,LiDAR能够有效探测森林植被的空间结构和地形,在森林参数的定量测量和反演上取得了成功的应用,特别是对森林垂直结构的探测能力,具有传统光学遥感数据难以比拟的优势。地基激光雷达TLS(Terrestrial Laser Scanning)具有探测森林内部三维场景的能力,可以提供一种快速、无破坏、全自动的方式来获取森林调查因子,如树干位置、胸径、树高、树冠尺寸等(Király和Brolly,2007;Kankare 等,2013;Zheng 等,2013)。TLS也能够获取精细的林冠下层垂直结构(Liu 等,2017;Moskal和Zheng,2011)。近期TLS的相关研究集中在立木的三维建模与参数提取,刘鲁霞等(2014)在胸径处水平切割点云得到2D平面,并利用Hough变换拟合单木胸径。Wang等(2016)基于随机抽样一致RANSAC(Random Sample Consensus)将分层投影到平面的树干点云圆弧拟合,并按照原始点云高度重塑立木圆柱3D形态。Olofsson等(2014)分析了点云不同高度层的比例以确定树干位置,然后用RANSAC进行圆柱拟合。这些研究的共同特点是使用距离地面点1 m以上的点云,消除了大部分地面植被。Liang等(2012)使用基于局部协方差矩阵特征的分类获得枝干点云。Ma等(2016)使用协方差特征分类得到叶片点云并实现了LAI的反演。Weinmann(2014)使用协方差特征值构造熵函数,确定最佳k临近点云个数作为自适应邻域,根据每个邻域协方差构造点云特征实现三维场景点云分类。以上研究使用协方差特征实现了不同场景的点云分类,但是尚未实现森林复杂场景近地面点云分类。
利用LiDAR对倒木点云分类和参数拟合的研究主要基于ALS(Ariborne Laser Scanning)数据展开(Lindberg 等,2013;Nyström等,2014;Polewski 等,2015),而利用TLS识别倒木的研究较少。现有TLS研究主要是将森林场景分为枝干点、地面点和植被点,拟合立木参数等。Lalonde等(2016)使用车载激光雷达实现了森林场景叶片点、枝干点、地面点和电力线点的分类,并对枝干点云进行了圆柱拟合。此外,TLS高密度点云和ALS点云(每平方米数个至数十个)识别倒木的方法有很大的不同,ALS数据一般只能利用倒木的线性特征识别(Polewski 等,2015),而TLS数据则有可能直接从3D空间进行圆柱识别。由于大量倒木紧贴地面导致获取其参数时效率较低,使用地基激光雷达能够通过扫描得到倒木的三维结构拟合出整体圆柱结构,更加准确高效的获取倒木参数。
利用TLS进行倒木研究的难点在于:(1) TLS数据中立木和灌木遮挡倒木,导致倒木采样不完整;(2) 倒木贴近地面,其自身形变导致圆柱形态弱化,一株倒木可能呈现非线性的圆柱特征;(3) 扫描位置固定引起的目标物的不完整采样以及点密度的变化导致分类和圆柱拟合难度增加;(4) 倒木倒向的不确定性导致倒木参数获取难度增加。针对以上倒木研究的难点,本研究的目标是针对地表植被复杂、树木和灌木遮挡严重的森林场景,进行基于TLS的复杂森林近地表点云精细分类和倒木提取。
2 研究区概况及数据
2.1 研究区
实验区位于内蒙古自治区根河市大兴安岭森林生态系统国家野外科学观测站内,地理位置50°49′N—50°51′N,121°30′E—121°31′E,地处大兴安岭西北坡,海拔800—900 m,属寒温带半湿润气候区,冬季极端天气和采伐导致林地出现大量倒木(娜丽,2015)。
2.2 研究数据
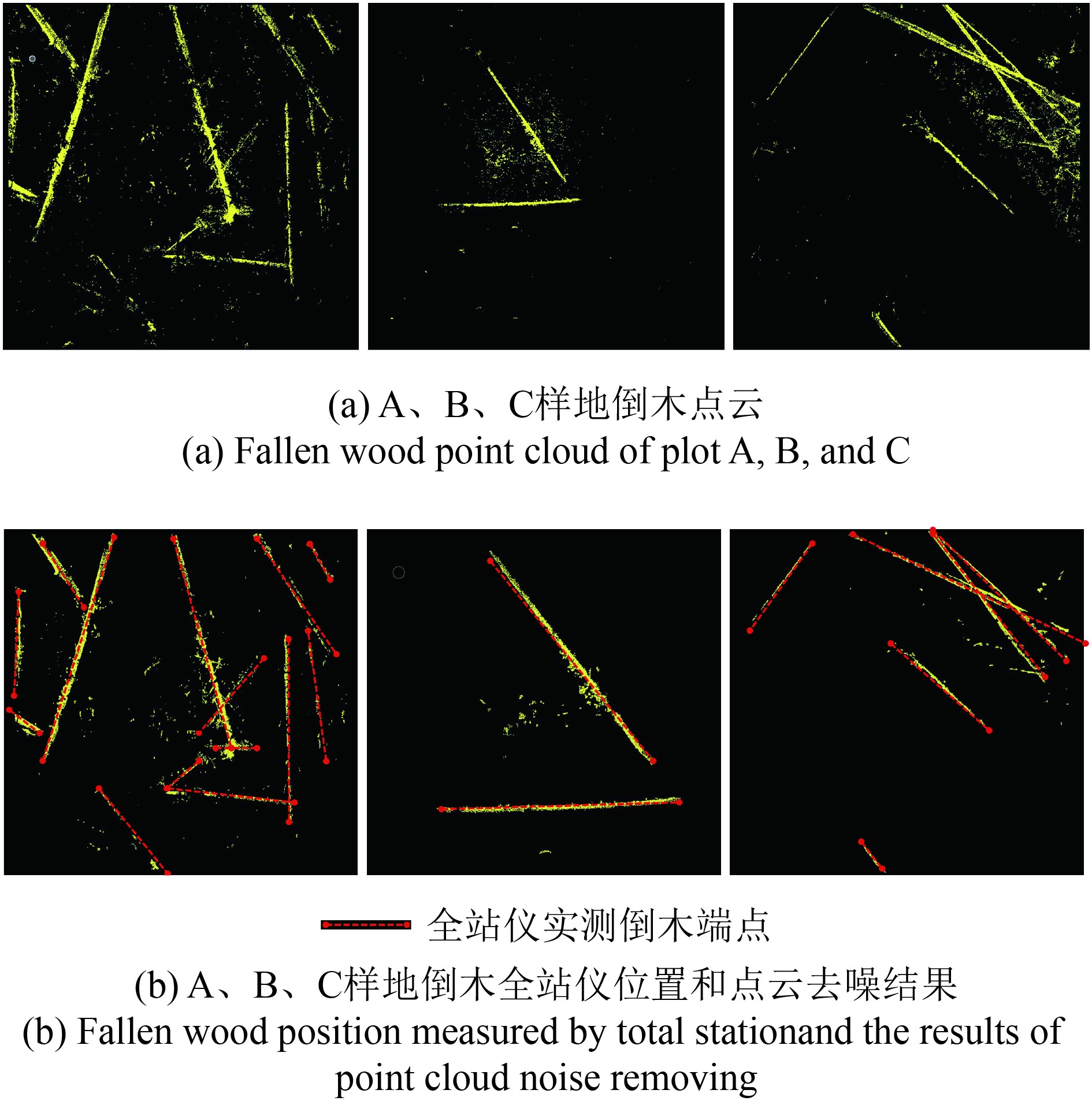
本研究的TLS数据于2016年8月用Trimble TX8采集,采用窄的红外激光束快速扫描,扫描时间3 min,30 m处点间隔11.3 mm。同时使用全站仪测量样地中胸径5 cm以上的倒木端点坐标(图1)和地基激光雷达7个靶标坐标,使用RealWorks和Trimble Business Center软件实现多站拼接和倒木坐标的相对配准。倒木底端测量位置为倒木根部树干起始处,顶端测量至顶端胸径小于5 cm的位置,树冠有枝叶的倒木测量到枝叶下端位置。本文研究对象为A、B、C的3个边长20 m的正方形样地。样地中杂草灌木对倒木有一定遮挡,A样地倒木由于腐朽程度较低树干上杂枝比较多,B、C样地倒木上杂枝较少,根据场景的复杂程度进行了不同站数的扫描,A、C两个样地扫描4站,B样地扫描1站,能够有效表达场景中倒木分布(表1)。


表 1 样地概况表
Table 1 Summary of Research Plots
| 样地
名称 |
倒木数量
(直径>5 cm) |
地表植被
复杂度 |
坡度 | 扫描
站数 |
点云总数/万 |
| A | 14 | 高 | <5° | 4 | 123.81 |
| B | 2 | 中 | <5° | 1 | 61.83 |
| C | 6 | 低 | 5°—10° | 4 | 262.47 |
3 实验方法
本研究分为森林近地面点云分类和倒木点云圆柱拟合两部分,实验技术路线见图2。由于倒木点云分类能够有效提高倒木圆柱拟合的效率和精度,因此首先使用自适应kNN协方差矩阵提取点云的3D和2D特征,将近地面1.3 m处的点云分为地面点、杂草点、倒木点和立木点,并与传统kNN方法的分类结果比较;递归特征排除RFE(Recursive Feature Elimination)筛选变量后基于随机森林实现点云分类。
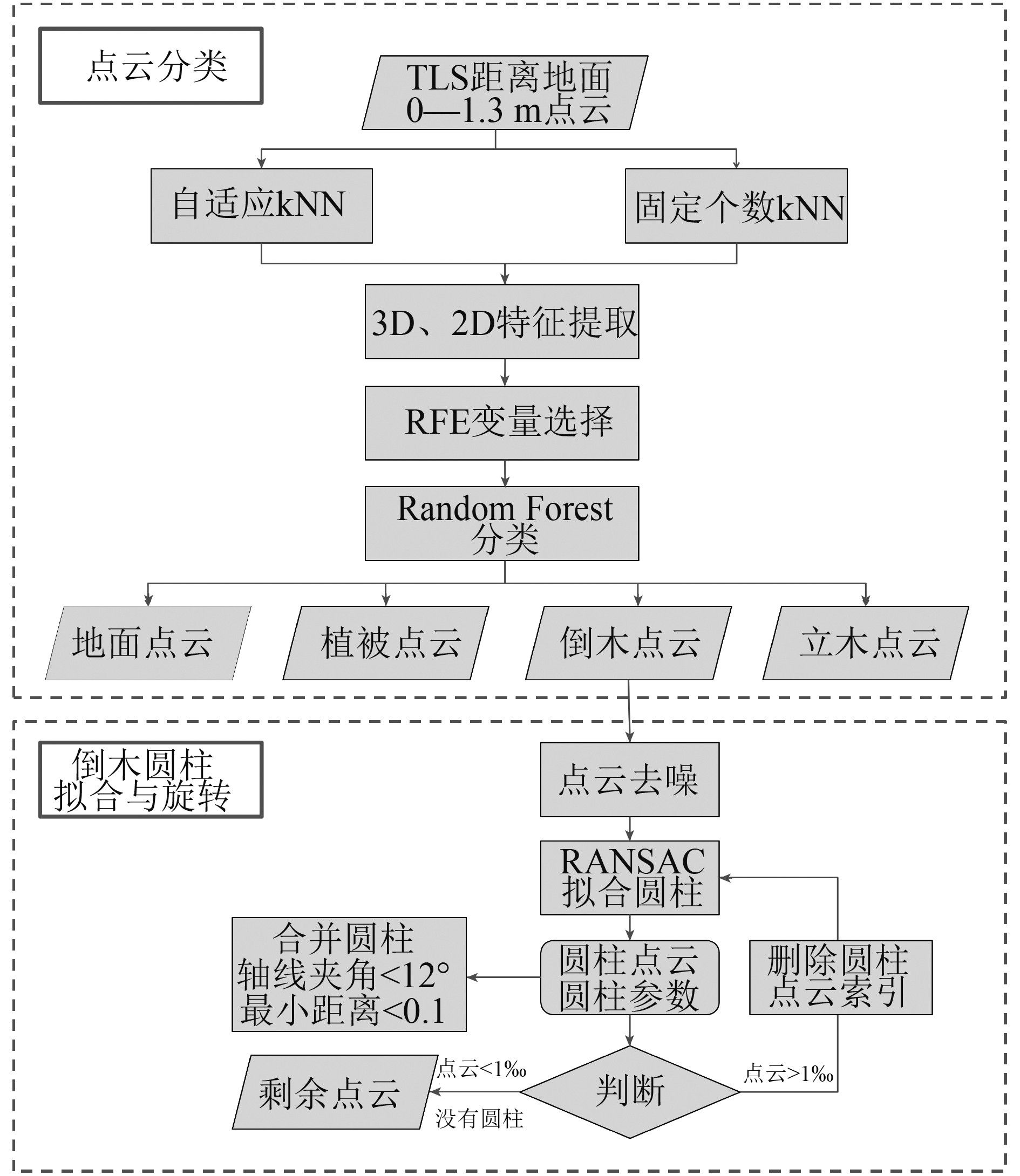
对分类后的倒木点云进行去噪,然后进行RANSAC圆柱拟合,根据其轴线方向将分割结果划分为倒木圆柱和立木圆柱;根据圆柱两两之间的夹角和距离阈值进行倒木圆柱的合并。
3.1 点云变量提取
LiDAR点云分类一般基于点云几何邻域特征展开。本研究使用点云团块特征通过自适应k临近kNN(k Nearest Neighbor)的方法查找点云邻域,根据团块内点云的协方差特征值构成3D和2D特征。自适应k临近是通过逐步增加临近点云个数得到的特征值,构造熵函数从而确定每个点云自适应邻域的点云个数。2D特征是自适应邻域内x,y平面方向的特征。
3.1.1 自适应邻域k值
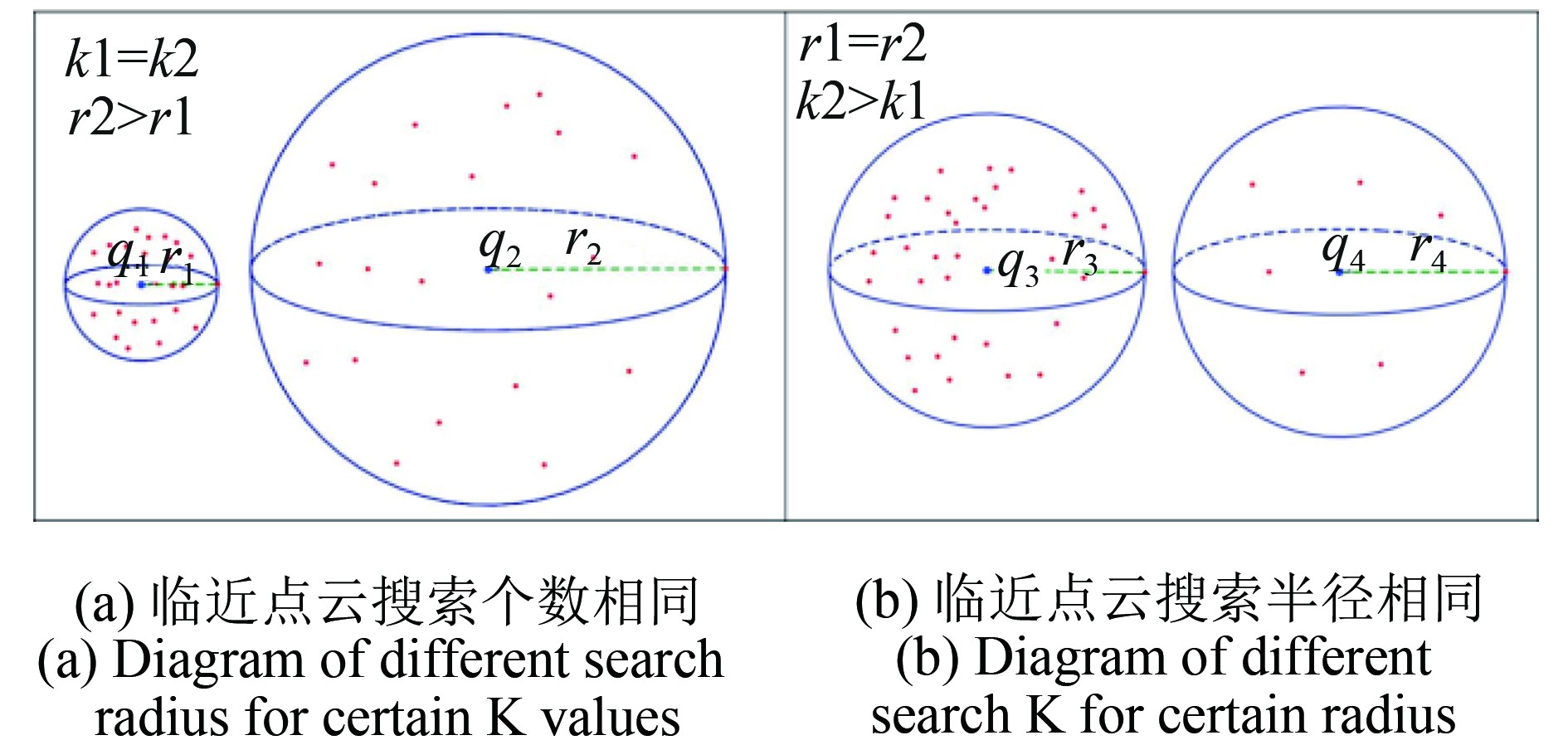
森林场景的复杂结构和地基激光雷达多站扫描导致扫描的点云密度变化很大,使用固定半径或者固定点云个数的kNN都会存在弊端。当搜索点云个数固定(图3(a)),点云密度较高(
设定
团块中的临近点云三维坐标构成矩阵A,
| ${{A}} = {\left[ {\begin{array}{*{20}{c}} {{{{x}}_1}}&{{{{y}}_1}}&{{{{z}}_1}} \\ {{{{x}}_2}}&{{{{y}}_2}}&{{{{z}}_2}} \\ \vdots & \vdots & \vdots \\ {{{{x}}_n}}&{{{{y}}_n}}&{{{{z}}_n}} \end{array}} \right]_{n \times 3}}$ | (1) |
团块中心点云坐标构成n×3矩阵B,
| ${{B}} = {\left[ {\begin{array}{*{20}{c}} {{{x}}'}&{{{y}}'}&{{{z}}'} \\ {{{x}}'}&{{{y}}'}&{{{z}}'} \\ \vdots & \vdots & \vdots \\ {{{x}}'}&{{{y}}'}&{{{z}}'} \end{array}} \right]_{n \times 3}}$ | (2) |
团块协方差矩阵
| ${{{C}}_{\operatorname{cov} }} = \frac{1}{n}{({{A}} - {{B}})^{\rm{T}}}({{A}} - {{B}})$ | (3) |
协方差矩阵的特征值按照
| ${S_{\textit{λ}}} = \frac{{{{\textit{λ}} _3}}}{{{{\textit{λ}} _1}}}$ | (4) |
| ${P_{\textit{λ}}} = \frac{{{{\textit{λ}}_2} - {{\textit{λ}}_3}}}{{{{\textit{λ}} _1}}}$ | (5) |
| ${L_{\textit{λ}}} = \frac{{{{\textit{λ}}_1} - {{\textit{λ}}_2}}}{{{{\textit{λ}} _1}}}$ | (6) |
| ${E_{\dim }} = {L_{\textit{λ}}}\ln ({L_{\textit{λ}}}) + {P_{\textit{λ}}}\ln ({P_{\textit{λ}}}) + {S_{\textit{λ}}}\ln ({S_{\textit{λ}}})$ | (7) |
k值为目标点云最合适的临近点云个数,取值范围根据具体数据的点云密度确定[
3.1.2 3D特征提取
本文筛选Weinmann等(2015)提取的特征参与点云分类。3D因子体现的是点云分布结构特征,通过点云临近空间
(1)点云法向量:表面法向量是几何体表面的重要属性,在点云分类领域有大量应用。本文使用曲面重建技术,使用最小二乘法按照自适应邻域内的点云数据集拟合曲面,然后从曲面模型中计算表面法线。因此将估计表面法线的问题转换为计算协方差矩阵的特征矢量和特征值,法向量是最小特征值
(2)表面变化3D特征:基于
表 2 点云3D特征
Table 2 3D Variables of Point Cloud
| 3D特征计算公式 | 3D Variables | 3D特征 |
|
|
Scattering | 发散状指数 |
|
|
Planarity | 面状指数 |
|
|
Linearity | 线性指数 |
|
|
Omnivariance | 各向同性 |
|
|
Anisotropy | 各向异性 |
|
|
Eigenentropy | 特征熵 |
|
|
Sum of eigenvalues | 特征值和 |
|
|
Change of curvature | 曲率变化 |
|
|
Radius_kNN | 临近团块半径 |
|
|
Verticality | 垂直度 |
|
|
团块delta_△Z | 团块z差 |
|
|
Std_Z_KNN | 团块z值方差 |
|
|
Eigenvalue | 自适应团块特征值 |
3.1.3 2D特征提取
(1)归一化高度(Normalized Z)。为了去除地形对点云分类的影响,需要计算高程归一化后的点云z值。由于本研究区地势平坦,地面高程差别很小,TLS数据点密度很大,所以采用局部最小值法提取地面高程,对植被点云数据进行归一化处理。
(2)平面2D特征。2D特征是点云临近团块的平面特征,Mallet加入2D特征后在一定程度上提高了城市点云的分类精度(Mallet 等,2011)。平面特征是基于自适应临近点云的x,y值计算表3中的平面特征,不考虑点云z值以及z方向的特征值。
表 3 点云2D特征
Table 3 2D Variables of Point Cloud
| 2D特征公式 | 2D Variables | 2D特征 |
|
|
Normalized_Z | 归一化Z |
|
|
Radius_KNN_2D | 团块平面距离 |
|
|
EVs_2D | 团块平面特征值 |
|
|
sum_EVs_2D | 团块x,y特征值和 |
|
|
EV_ratio | 2D特征值比 |
3.2 分类与精度验证
本研究使用随机森林算法(Breiman,2001;雍凯,2008)进行特征筛选和点云分类。在随机森林分类前,使用随机森林算法中递归特征排除方法删除对模型精度贡献较小的变量(Granitto 等,2006)。基于验证数据建立混淆矩阵评价点云分类精度,计算总体分类精度、用户精度、生产者精度和Kappa系数评价分类结果(赵英时,2013)。
由于RFE筛选得到的变量代表性较强,且不同样地中同类别点云的形态特征相似,因此认为本研究中的样地样本具有一定的适用性和推广性。使用样地A的训练样本得到的训练模型对B、C样地进行点云分类,分类结果与B、C样地的样本点构造混淆矩阵,评价推广样本的分类精度。
3.3 RANSAC圆柱拟合与精度验证
3.3.1 点云去噪
倒木点云提取后会产生部分稀疏的离群点,离群点会导致点云特征计算错误,而且会对倒木不规则圆柱拟合产生较大影响,因此在RANSAC圆柱拟合前使用每个点到其临近点的距离去除离群点。本文使用PCL Statistical Outlier Removal滤波器(PCL, http://pointclouds.org/documentation/tutorials/statistical_outlier.php[2017-09-14]),噪声点临近搜索点云个数设为100,标准差倍数设为1,这意味着如果一个点的距离超出平均距离标准差一倍以上,则被标记为噪声点,并将其移除。
3.3.2 RANSAC圆柱拟合
RANSAC可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数(Fischler和Bolles,1981)。RANSAC算法具有迭代次数少、抗粗差能力强的特点。本研究通过多次调整确定了RANSAC参数的范围,限制了每个局内点到模型的距离阈值Distance Threshold小于15 cm,设置表面法线的影响权重Normal Distance Weight为0.2,并且限制圆柱体模型的半径
| $\begin{gathered} {(x - {x_0})^2} + {(y - {y_0})^2} + {({\textit{z}} - {{\textit{z}}_0})^2} - {r^2} = \\ \frac{{{{[l(x - {x_0}) + m(y - {y_0}) + n({\textit{z}} - {{\textit{z}}_0})]}^2}}}{{{l^2} + {m^2} + {n^2}}} \\ \end{gathered} $ | (8) |
式中,
3.3.3 圆柱合并
由于RANSAC圆柱拟合的迭代特性,会有同一个倒木点云分割成多个圆柱的情况出现,因此需要将过分割的倒木圆柱筛选后合并为一棵倒木,根据拟合的圆柱参数计算圆柱轴线的夹角:
| ${{\theta}} = \arccos\frac{{{{\vec {{d}}}_0} \cdot {{\vec {{d}}}_1}}}{{\left| {{{\vec {{d}}}_0}} \right| \cdot \left| {{{\vec {{d}}}_1}} \right|}} \leqslant 12^\circ $ | (9) |
式中,
3.3.4 倒木数量精度验证
将倒木数量精度作为RANSAC分割与圆柱合并策略的评价指标。合并后将倒木的数量与实测倒木棵数和分布做比较,验证RANSAC和合并方法能否有效实现单棵倒木的提取。
4 结果与分析
本文针对A、B、C共3个森林样地,提取距地面0—1.3 m处的点云作为实验数据。以0.1 m的剖面进行训练样本的选择,每个样地选择3%—5%的地面点、叶片点、立木点和倒木点作为训练样本。由于人工选择点云时都按照团块进行选择,每个团块中点云特征几乎相同,容易造成样本的冗余,因此从以上选出的样本中随机筛选1/5作为随机森林样本点,因此实际参与分类的点云大约0.6%—1%。将每个样地的样本进行10等分,7份用于训练,3份用于验证。
4.1 变量筛选
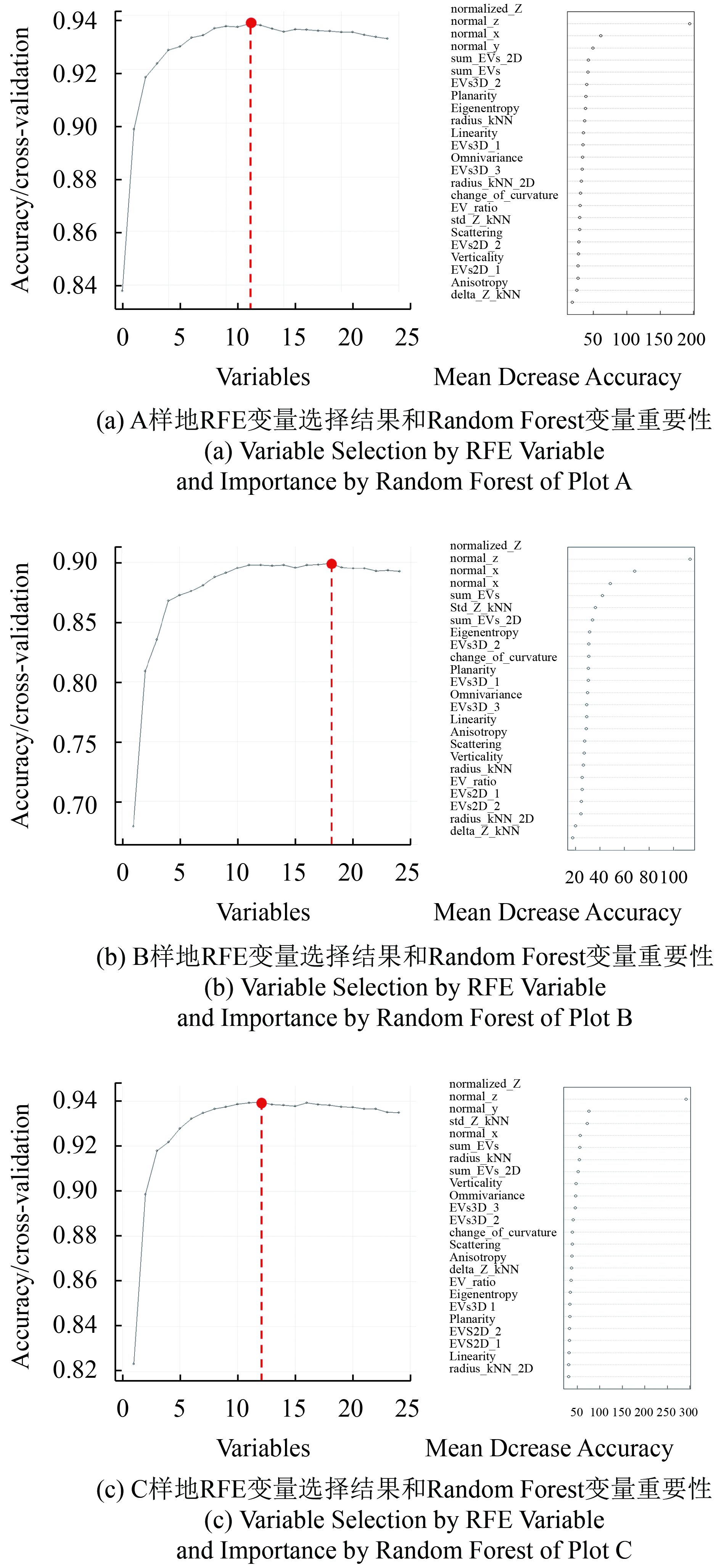
使用RFE方法将24个变量进行重要度排序,去除对模型估测精度贡献较小的变量。图4(a)、(b)、(c)分别为A、B、C共3个样地的RFE变量选择结果和Random Forest变量重要性图,A、B、C共3个样地分类精度最高时的变量数分别为12、18、12个,B样地18个变量的分类精度与12个变量的分类精度非常接近,最终确定12个变量参与分类。根据3个样地的变量重要性选择normalized_Z、normal_z、normal_y、normal_x、sum_EVs_2D、sum_EVs、radius_kNN、std_Z_kNN、omnivariance、EVs3D_2、planarity、verticality 12个变量参与随机森林分类。在本实验中,重要度最高的变量是归一化高度,这是由于复杂森林场景中高程对于分类非常重要,能较好反应出场景中的垂直高度信息。3D形态特征和2D特征值对场景分类有一定贡献。
4.2 分类结果与精度
本研究采用混淆矩阵评价分类精度,分类精度见表4—表6,训练样本和分类结果分别见图5。A、B、C样地分类总体精度分别为93.17%、94.52%、95.16%,Kappa系数分别为0.8771、0.9145、0.9242。3个样地倒木点云的用户精度分别为87.80%、98.35%、93.87%。3个样地中枝叶点云的用户精度都比较低,说明枝叶点云错分比较严重。就生产者精度而言,A样地最低的是枝叶点云,只有66.79%,B、C样地生产者精度最低的是倒木点云,说明A样地的枝叶点云和B、C两个样地的倒木点云有漏分现象。
表 4 A样地自适应临近点云分类精度表
Table 4 Self-adjust kNN point cloud classification accuracy of plot A
| 点云类别 | 地面 | 枝叶 | 倒木 | 立木 | 总计 | 用户精度/% |
| 地面 | 3220 | 108 | 18 | 0 | 3346 | 96.23 |
| 枝叶 | 45 | 372 | 33 | 29 | 479 | 77.66 |
| 倒木 | 3 | 57 | 648 | 30 | 738 | 87.80 |
| 立木 | 0 | 20 | 15 | 643 | 678 | 94.84 |
| 总计 | 3268 | 557 | 714 | 702 | 5241 | |
| 生产者精度/% | 98.53 | 66.79 | 90.76 | 91.60 | 93.17 |
表 5 B样地自适应临近点云分类精度表
Table 5 Self-adjust kNN point cloud classification accuracy of plot B
| 点云类别 | 地面 | 枝叶 | 倒木 | 立木 | 总计 | 用户精度/% |
| 地面 | 244 | 21 | 1 | 0 | 266 | 91.73 |
| 枝叶 | 17 | 748 | 33 | 4 | 802 | 93.27 |
| 倒木 | 0 | 2 | 119 | 0 | 121 | 98.35 |
| 立木 | 1 | 2 | 1 | 302 | 306 | 98.69 |
| 总计 | 262 | 773 | 154 | 306 | 1495 | |
| 生产者精度/% | 93.13 | 96.77 | 77.27 | 98.69 | 94.5 |
表 6 C样地自适应临近点云分类精度表
Table 6 Self-adjust kNN point cloud classification accuracy of plot C
| 点云类别 | 地面 | 枝叶 | 倒木 | 立木 | 总计 | 用户精度/% |
| 地面 | 5265 | 208 | 5 | 0 | 5478 | 96.11 |
| 枝叶 | 150 | 4349 | 84 | 67 | 4650 | 93.53 |
| 倒木 | 0 | 19 | 628 | 22 | 669 | 93.87 |
| 立木 | 0 | 26 | 9 | 1347 | 1382 | 97.47 |
| 总计 | 5415 | 4602 | 726 | 1436 | 12179 | |
| 生产者精度/% | 97.23 | 94.50 | 86.50 | 93.80 | 95.16 |

4.3 变量推广精度验证
通过以上精度验证发现训练样本在各自样地的应用效果较好。随机森林筛选出的重要变量相似度比较高,地基激光雷达的点云密度受到扫描距离和拼接站数的影响,导致点云密度差异较大,但是形态特征和垂直特征有一定相似度,比如A样地中的倒木特征在B样地中依然存在一定的圆柱特征,只是圆柱参数不同,因此利用样地A的分类模型对B、C两个样地进行点云分类,得到的分类精度(表7、表8)。B样地点云的分类总精度为62.38%,Kappa系数0.494,倒木点云精度为79.31%;C样地点云的分类总精度为59.80%,Kappa系数0.443,倒木点云用户精度为48.06%。B样地较为简单,倒木较少而且可分率较高,因此能够有效地完成训练样本的推广,C样地倒木点云较多,因此倒木点云分类精度比较低。经过大量样本的训练基本可以做到分类模型的推广。
表 7 A样地训练模型实现B样地分类精度表
Table 7 Classification accuracy of plot B based on RF model of plot A
| B-A | 地面 | 枝叶 | 倒木 | 立木 | 总计 | 用户精度/% |
| 地面 | 3668 | 692 | 47 | 4 | 4411 | 83.16 |
| 枝叶 | 3145 | 5647 | 3227 | 975 | 12994 | 43.46 |
| 倒木 | 109 | 309 | 1986 | 100 | 2504 | 79.31 |
| 立木 | 6 | 102 | 721 | 4350 | 5179 | 83.99 |
| 总计 | 6928 | 6750 | 5981 | 5429 | 25088 | |
| 生产者精度/% | 52.94 | 83.66 | 33.21 | 80.13 | 62.38 |
表 8 A样地训练样本实现C样地分类精度表
Table 8 Classification accuracy of plot C based on RF model of plot A
| C-A | 地面 | 枝叶 | 倒木 | 立木 | 总计 | 用户精度/% |
| 地面 | 68783 | 17034 | 3695 | 160 | 89672 | 76.71 |
| 枝叶 | 2049 | 24966 | 37761 | 11418 | 76194 | 32.77 |
| 倒木 | 17 | 2141 | 5773 | 4081 | 12012 | 48.06 |
| 立木 | 0 | 1385 | 1196 | 20860 | 23441 | 88.99 |
| 总计 | 70849 | 45526 | 48425 | 36519 | 201319 | |
| 生产者精度/% | 97.08 | 54.84 | 11.92 | 57.12 | 59.80 |
4.4 RANSAC圆柱拟合与合并
A、B、C共3个样地倒木点云去噪后(图6(b))进行RANSAC分割并拟合圆柱参数。由于倒木长时间的腐朽变质和泥土堆积,倒木树干形状和圆柱特征变得非常模糊,尤其是倒木两端,因此倒木端点的确定非常困难,有的甚至平缓过渡到地面,圆柱线性特征不是特别明显,有可能将一棵倒木分割成多个圆柱。
由于点云分类的不确定性,立木根部错分为倒木的点云具有一定的圆柱特征,而且这些点云分布比较集中,去噪算法无法去除,这些点云极易通过RANSAC拟合成圆柱,因此根据拟合圆柱的轴线方向将与z轴夹角小于8°的判断为立木圆柱;RANSAC迭代拟合的特性可能将一棵倒木分割为多个圆柱,将圆柱夹角小于12°且点云之间距离小于0.1 m的圆柱合并为一个圆柱,合并后的倒木参数使用最先分割出的圆柱的参数。
根据上文分割得到的圆柱参数进行倒木圆柱的筛选与合并,计算样地A中18个RANSAC分割得到的圆柱轴线与z轴的夹角、圆柱两两之间的轴线夹角和点云最小距离。与z轴夹角<8°的点云,可能是被错分为倒木点云与地面连接处的立木点云。圆柱9与z轴夹为3.37°,根据原始点云可以判断圆柱9属于立木圆柱非常接近地面的部分。去除立木圆柱后使用剩余圆柱两两的夹角和距离合并圆柱,合并的过程如下(表9、图7)。
表 9 A样地圆柱轴线夹角和距离合并圆柱
Table 9 Merge cylinder by angles of the cylinder axis and cylinder distance of plot A
| A | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 1 | — | 145.54 | 106.54 | 15.7 | 157.5 | 43.1 | 17.94 | 68.68 | 174.61 | 85.99 | 175.51 | 122.65 | 155.42 | 125.85 | 15.98 | 8.63 | 48.37 | 166.74 |
| 2 | 3.67 | — | 39.02 | 161.17 | 21.75 | 104.23 | 127.87 | 77.04 | 29.2 | 95.8 | 38.89 | 24.2 | 58.35 | 88.18 | 129.57 | 153.93 | 97.21 | 21.2 |
| 3 | 0.01 | 4.88 | — | 122.15 | 57.38 | 66.25 | 88.87 | 38.13 | 68.16 | 93.76 | 77.85 | 18.29 | 96.82 | 126.96 | 90.56 | 114.92 | 58.19 | 60.21 |
| 4 | 2.33 | 10.35 | 0.01 | — | 166.78 | 57.47 | 33.31 | 84.15 | 169.4 | 83.92 | 159.84 | 137.67 | 139.99 | 110.56 | 31.63 | 7.25 | 63.97 | 177.44 |
| 5 | 9.69 | 2.78 | 10.3 | 15.65 | — | 123.6 | 143.67 | 95.01 | 19.57 | 109.24 | 26.52 | 45.39 | 46.12 | 70.04 | 144.02 | 164.63 | 113.82 | 14.64 |
| 6 | 9.98 | 0.01 | 5.83 | 13.92 | 2.57 | — | 25.66 | 28.9 | 131.6 | 74.52 | 140.58 | 80.23 | 151.89 | 165.55 | 28.64 | 50.39 | 14.94 | 124.54 |
| 7 | 2.15 | 0.39 | 0.04 | 4.76 | 2.67 | 6.24 | — | 50.84 | 156.66 | 83.83 | 166.09 | 104.7 | 167.73 | 143.78 | 3.54 | 26.06 | 30.73 | 148.99 |
| 8 | 0.01 | 7.45 | 0.01 | 0.04 | 11.26 | 7.48 | 0.01 | — | 105.95 | 86.81 | 115.61 | 54.18 | 133.35 | 165.03 | 52.76 | 76.9 | 20.47 | 98.15 |
| 9 | 0.01 | 4.95 | 0.01 | 3.35 | 10.13 | 9.79 | 2.27 | 2.01 | — | 93.3 | 9.7 | 51.96 | 29.41 | 59.54 | 158.69 | 175.73 | 126.29 | 8.08 |
| 10 | 3.64 | 5.07 | 3.23 | 7.73 | 8.35 | 6.07 | 0.01 | 3.85 | 3.45 | — | 92.83 | 86.43 | 84.95 | 97.2 | 86.83 | 83.63 | 88.18 | 95.05 |
| 11 | 0.01 | 4.38 | 0.02 | 2.85 | 9.56 | 9.85 | 3.11 | 2.6 | 0.01 | 3.52 | — | 61.54 | 20.12 | 49.98 | 168.37 | 166.88 | 135.98 | 17.7 |
| 12 | 0.01 | 8.45 | 1.64 | 1.33 | 11.78 | 9.52 | 3.18 | 3.98 | 0.01 | 3.24 | 0.01 | — | 79.5 | 111.5 | 106.85 | 130.51 | 74.64 | 44.43 |
| 13 | 6.45 | 2.61 | 0.04 | 8.33 | 0.01 | 2.05 | 4.56 | 3.23 | 5.43 | 4.88 | 7.91 | 7.54 | — | 33.71 | 169.28 | 146.82 | 153.6 | 37.47 |
| 14 | 0.01 | 6.49 | 2.88 | 1.88 | 10.35 | 9.85 | 4.18 | 6.8 | 0.01 | 4.2 | 0.01 | 0.11 | 9.55 | — | 141.6 | 117.8 | 171.99 | 67.2 |
| 15 | 7.29 | 11.52 | 5.94 | 1.03 | 17.34 | 18.77 | 12.91 | 12.67 | 7.27 | 12.9 | 7.82 | 5.87 | 18.13 | 7 | — | 24.44 | 32.4 | 150.77 |
| 16 | 4.74 | 12.35 | 0.14 | 1.03 | 16.95 | 15.81 | 6.94 | 2.92 | 5.31 | 9.51 | 4.69 | 2.57 | 11.35 | 3.33 | 2.95 | — | 56.73 | 174.92 |
| 17 | 8.64 | 3.95 | 0 | 11 | 9.7 | 5.14 | 6.02 | 4.66 | 8.56 | 6.92 | 9.44 | 9.05 | 1.44 | 11.57 | 19.76 | 13.56 | — | 118.39 |
| 18 | 6.52 | 13.47 | 1.3 | 2.76 | 18.89 | 17.28 | 8.99 | 5.56 | 6.91 | 10.98 | 6.29 | 4.77 | 13.7 | 5.13 | 0.17 | 1.23 | 15.64 | — |
| z轴
夹角 |
85.42 | 81.82 | 82.91 | 82.47 | 69.3 | 76.38 | 84.33 | 89.69 | 85.84 | 3.37 | 86.84 | 89.55 | 84.2 | 85.16 | 87.21 | 82.58 | 89.73 | 83.64 |
| 注:对角线右上部分代表圆柱之间的夹角(夹角0°—180°),左下部分代表圆柱点云的最小距离。夹角0°—12°和168°—180°的圆柱(黄色)作为候选圆柱,查找候选圆柱的之间的最小距离,小于0.1 m的合并为同一圆柱。 | ||||||||||||||||||
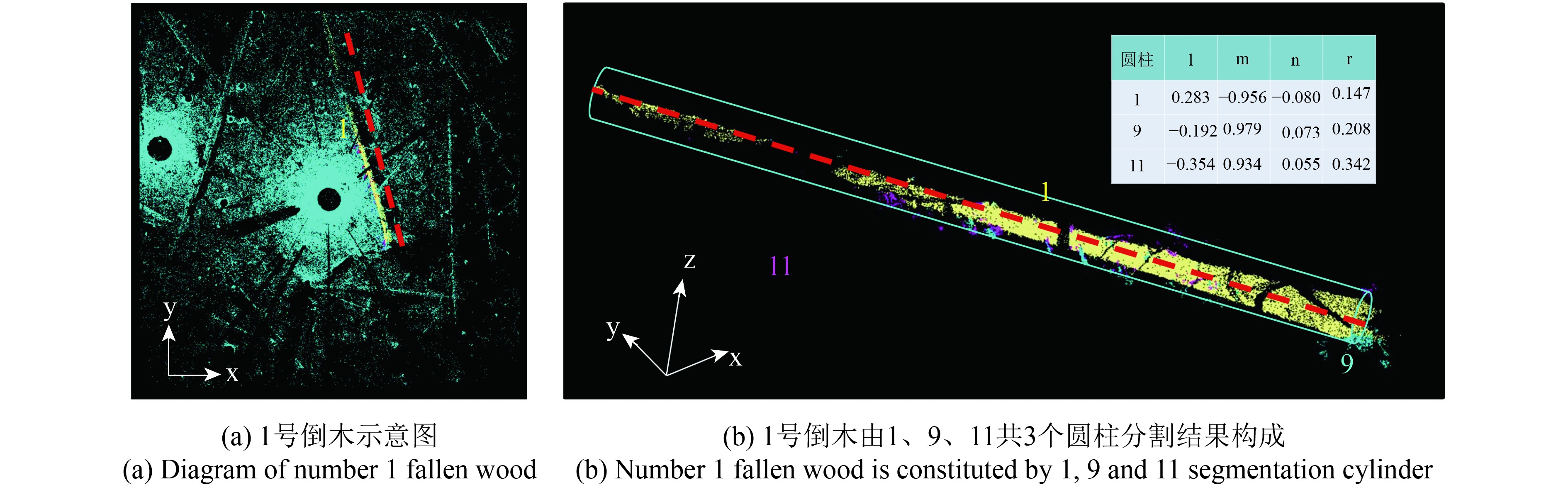
(1) 圆柱1和9、11,4和17,9和15、17,14和16,16和17之间的夹角<12°,可能属于同一个倒木,再通过分割圆柱之间的最小距离判断是否属于同一圆柱。
(2) 1和9、11圆柱之间的距离<0.1 m,其他几个夹角比较小的圆柱距离较远,因此将 1、9和11作为同一个圆柱合并,合并后的圆柱参数使用圆柱1的参数。
将RANSAC圆柱分割结果通过先验知识筛选与合并后,3个样地倒木提取的结果见表10,A样地的18个倒木中有1个立木圆柱,剩下的17个圆柱合并为14棵倒木;B样地比较简单,2棵倒木全部拟合成功;C样地8个圆柱合并为6棵倒木,3个样地倒木数量的检测都达到100%,表明基于倒木点云能够准确获得样地倒木的数量以及倒木的大体参数。
表 10 倒木株数精度验证
Table 10 The accuracy of the number of fallen tree
| 样地 | RANSAC
分割圆柱 |
立木点
云圆柱 |
合并后倒
木圆柱 |
实际
倒木 |
倒木
检测率/% |
| A | 18 | 1 | 14 | 14 | 100 |
| B | 2 | 0 | 2 | 2 | 100 |
| C | 8 | 0 | 6 | 6 | 100 |
5 讨 论
5.1 分类不确定性因素分析
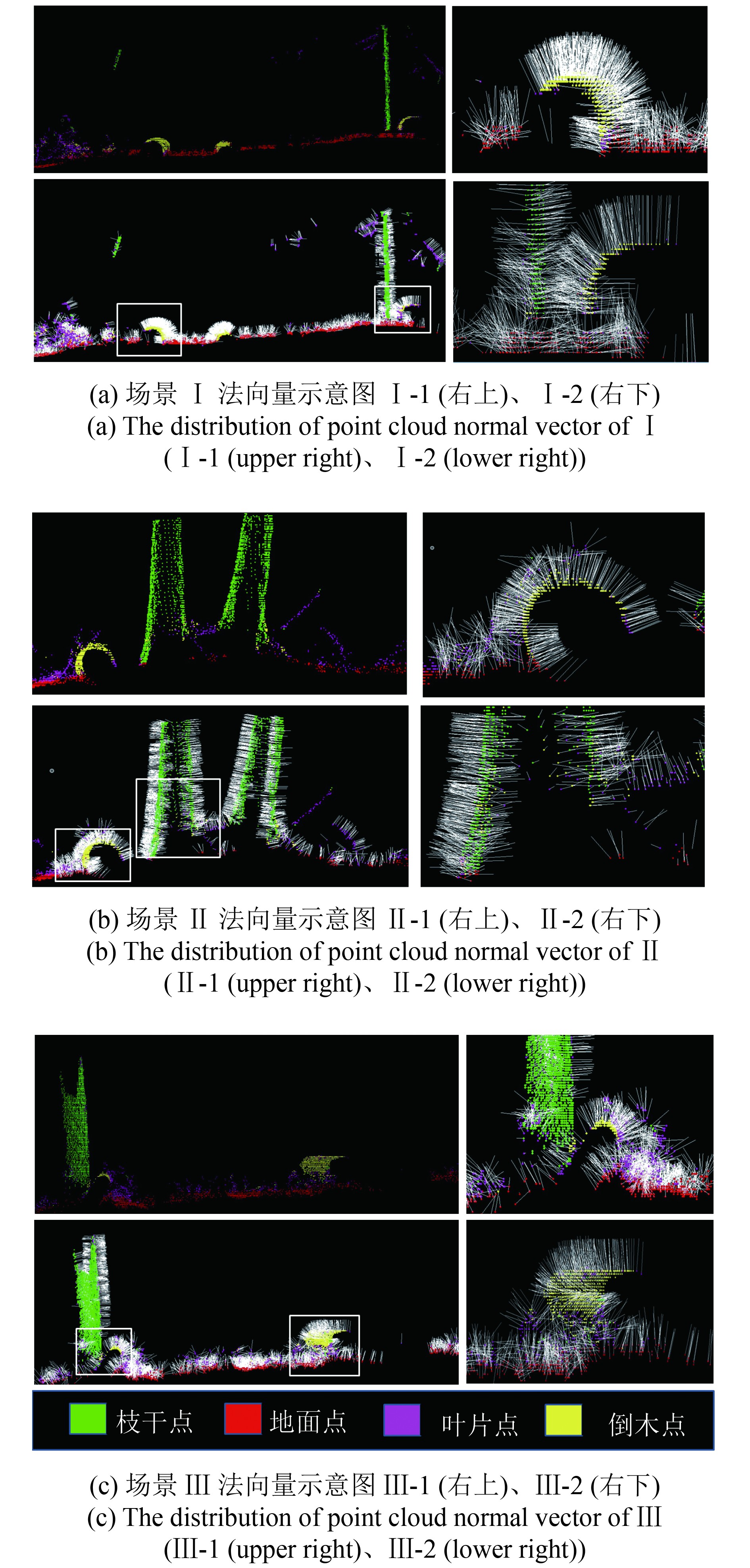
本文使用单站和多站拼接的森林点云数据,根据点云临近空间中的线状、面状、发散状指数得到团块中的3D指标,根据自适应临近点云计算的3D、2D点云特征,将复杂的森林结构点云分为地面、植被、倒木和立木点。分类结果使用0.1 m的切面截取后,其法向量结果如图8所示。场景Ⅰ比较简单,Ⅰ-1倒木中有少量倒木点云错分为植被点云,但是这些点云对圆柱拟合影响很小;Ⅰ-2立木根部点云有少量错分。场景Ⅱ比较复杂,Ⅱ-1倒木点云附着少量植被;Ⅱ-2两棵立木根部向地面过渡的位置极易错分为倒木点云,这些错分点云在RANSAC拟合时构成立木圆柱。场景Ⅲ立木和倒木点云交错非常复杂,Ⅲ-1大量植被点附着在倒木上,但倒木点云仍然能够比较好的分类;Ⅲ-2能够清晰地看出倒木点云的法向量分布。根据以上结果将场景分为0—0.5 m近地面点和0.5—1.3远地面点进行详细分析。
远地面点包括立木和植被点云,立木线状特征与植被发散特征分类效果好,但是夹杂在灌木和杂草植被点中的枝干结构被植被点遮挡严重,线状特征的连续性降低,细小枝干点分类难度较大。
近地面点云非常复杂,包括地面点、植被点、倒木点和立木根部点云,地面点法向量有垂直向上的趋势,而且归一化高度能够有效分离地面点。植被点法向量发散度较大,不同形态的植被点云分布规律也不同,因此能够比较好的分离。倒木和立木都符合圆柱特征,部分倒木点云和立木点云错分为植被点,如场景Ⅰ-1和Ⅱ-1,是因为倒木边缘点云的圆柱特征不明显而错分。分类难度最大的是倒木点和立木根部点云,由于立木和倒木点云都具有圆柱特征而且归一化高度相近,贡献度较高的归一化高变量可能会将立木根部有一定圆柱特征而且距离地面较近的少量点云划分为倒木点,法向量方向是二者区分的最重要特征,立木x和y方向法向量大于z方向法向量,倒木法向量分布与倒木倒向有关。2D特征对于近地面点云分类有很大贡献,立木与倒木在x、y方向的点云差异明显,立木点云在x、y方向是一个圆,但是倒木在x、y方向是圆柱的侧面。由于这些错分点云构成的圆柱轴线与z轴夹角较小,因此在圆柱筛选部分可以去除;其次分类难度比较大的是倒木上面覆盖的少量植被点云,如场景Ⅱ-1和Ⅲ-1,部分点云能够穿透植被点云得到比较好的倒木圆柱特征,但是当点云密度不足以穿透植被点时,RANSAC能够有效地将遮挡的圆柱特征进行整体拟合,弥补了遮挡点云对倒木提取的影响。
5.2 与传统kNN点云搜索的比较
本文使用了自适应kNN点云团块协方差特征,由于每个点云周围的点云分布情况不同,因此搜索的临近点云个数也不同。对固定k临近个数(k=50)搜索得到的点云团块计算出的3D和2D特征进行分类,A、B、C共3个样地的分类总体精度分别为92.65%、89.09%、92.99%,Kappa系数分别为0.8684、0.8909、0.8904,倒木的点云分类精度为86.08%、88.24%、89.88%;使用自适应临近点云进行分类,得到3个样地总精度分别为93.17%、94.52%、95.16%,Kappa系数分别为0.8771、0.9145、0.9242,3个样地倒木点云分类精度分别为87.80%、98.35%、93.87%(表11)。这些结果表明,自适应kNN得到的点云特征相较于传统kNN分类精度有明显的提高,使用固定k临近的点云特征分类结果也可以有效实现森林复杂场景点云分类,但是相较自适应临近搜索精度有所降低。
表 11 A样地自适应k临近与固定k临近(k=50)分类精度比较
Table 11 Comparison of classification accuracy between self-adjust kNN and traditional kNN for plot A
| 样地 | 固定个数kNN(k=50) | 自适应kNN | |||||
| 总体
精度/% |
Kappa | 倒木
点云/% |
总体
精度/% |
Kappa | 倒木
点云/% |
||
| A | 92.65 | 0.8684 | 86.08 | 93.17 | 0.8771 | 87.80 | |
| B | 89.09 | 0.8909 | 88.24 | 94.52 | 0.9145 | 98.35 | |
| C | 92.99 | 0.8904 | 89.88 | 95.16 | 0.9242 | 93.87 | |
5.3 与其他倒木提取算法的比较
Lalonde等(2016)基于车载激光雷达将森林场景分为了叶片点、枝干点、电力线和地面点,枝干点云包括少量倒木。将分类得到的枝干点云进行了圆柱拟合,没有单独提取倒木点云进行拟合,也没有实现圆柱合并后倒木数量及参数进一步的精确计算。Wang等(2016)将立木2—4 m按照间隔20 cm分层后进行RANSAC圆柱拟合,并根据每段圆柱的轴线拟合出树木位置。该方法探测立木棵数精度达到100%,立木在拟合圆柱时叶片遮挡非常少,RANSAC能够有效实现立木的圆柱拟合。
目前还没有针对倒木点云进行RANSAC圆柱拟合并提出复杂倒木场景圆柱筛选与合并规则的研究,而本文对森林场景近地面点云实现了精细分类,作为倒木参数精确提取的基础,根据样地的不同情况进行RANSAC拟合,拟合结果基于倒木的形态特征进行合并,在复杂的环境中实现了倒木的探测,棵数精度达到100%。
6 结 论
本文使用地基激光雷达对复杂森林近地面点云进行精细分类,实现了复杂森林近地表范围地面点、杂草点、倒木点和树干点的分类,分析了分类特征的可扩展性,进而通过圆柱拟合和筛选合并得到了精确的倒木数量。结论如下:
(1)点云分类:与传统固定个数的kNN方法相比,自适应kNN得到的3D和2D特征能够有效进行森林复杂场景分类,对森林点云精细分类效果明显。但是自适应邻域计算效率比较低,对于更大范围场景的分类还需要提高算法效率。
(2)模型推广:本文使用A样地的随机森林分类模型对B、C两个样地进行分类有一定效果,样本特征有一定的可扩展性和相似性,但是分类精度较低,而且分类精度差异较大,因此仍需大量具有代表性的样本,进一步挖掘这些样本的分类特征,以待实现森林复杂近地表点云的自动分类。
(3)倒木参数提取:复杂样地中RANSAC能够有效地将分类后的倒木点云进行圆柱拟合,由于点云分类精度有限和倒木复杂的结构特征,需要使用先验知识对分割后的圆柱进一步筛选与合并才能完成倒木的精确提取。本文主要使用圆柱的轴线方向和圆柱的距离进行筛选、合并圆柱,得到精确的倒木棵数,这种筛选和合并策略有一定的适用性,但是针对不同情况的倒木场景需要调整策略来保证倒木的精确合并。
参考文献(References)
-
Breiman L. 2001. Random forests. Machine Learning, 45 (1): 5–32. [DOI: 10.1023/A:1010933404324]
-
Carmona M R, Armesto J J, Aravena J C and Pérez C A. 2002. Coarse woody debris biomass in successional and primary temperate forests in Chiloé Island, Chile. Forest Ecology and Management, 164 (1/3): 265–275. [DOI: 10.1016/S0378-1127(01)00602-8]
-
Cornaby B W and Waide J B. 1973. Nitrogen fixation in decaying chestnut logs. Plant and Soil, 39 (2): 445–448. [DOI: 10.1007/BF00014813]
-
Fischler M A and Bolles R C. 1981. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 24 (6): 381–395. [DOI: 10.1145/358669.358692]
-
Granitto P M, Furlanello C, Biasioli F and Gasperi F. 2006. Recursive feature elimination with random forest for PTR-MS analysis of agroindustrial products. Chemometrics and Intelligent Laboratory Systems, 83 (2): 83–90. [DOI: 10.1016/j.chemolab.2006.01.007]
-
Kankare V, Holopainen M, Vastaranta M, Puttonen E, Yu X W, Hyyppä J, Vaaja M, Hyyppä H and Alho P. 2013. Individual tree biomass estimation using terrestrial laser scanning. ISPRS Journal of Photogrammetry and Remote Sensing, 75 : 64–75. [DOI: 10.1016/j.isprsjprs.2012.10.003]
-
Király G and Brolly G. 2007. Tree height estimation methods for terrestrial laser scanning in a forest reserve//International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Finland: ISPRS: 211-215
-
Lalonde J F, Vandapel N, Huber D F and Hebert M. 2006. Natural terrain classification using three‐dimensional ladar data for ground robot mobility. Journal of Field Robotics, 23 (10): 839–861. [DOI: 10.1002/rob.20134]
-
Liang X L, Litkey P, Hyyppä J, Kaartinen H, Vastaranta M and Holopainen M. 2012. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Transactions on Geoscience and Remote Sensing, 50 (2): 661–670. [DOI: 10.1109/TGRS.2011.2161613]
-
Lindberg E, Hollaus M, Mücke W, Fransson J E S and Pfeifer N. 2013. Detection of lying tree stems from airborne laser scanning data using a line template matching algorithm. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-5/W2 : 169–174. [DOI: 10.5194/isprsannals-II-5-W2-169-2013]
-
Liu L X. 2014. Retrieving Vertical Structural Parameters of Forest Using Terrestrial and Airborne Laser Scanning Data. Beijing: Chinese Academy of Forestry (刘鲁霞. 2014. 机载和地基激光雷达森林垂直结构参数提取研究. 北京: 中国林业科学研究院)
-
Liu L X, Pang Y, Li Z Y, Si L and Liao S X. 2017. Combining airborne and terrestrial laser scanning technologies to measure forest Understorey volume. Forests, 8 (4): 111 [DOI: 10.3390/f8040111]
-
Ma L X, Zheng G, Eitel J U H, Moskal L M, He W and Huang H B. 2016. Improved Salient feature-based approach for automatically separating photosynthetic and nonphotosynthetic components within terrestrial Lidar point cloud data of forest canopies. IEEE Transactions on Geoscience and Remote Sensing, 54 (2): 679–696. [DOI: 10.1109/TGRS.2015.2459716]
-
Mallet C, Bretar F, Roux M, Soergel U and Heipke C. 2011. Relevance assessment of full-waveform Lidar data for urban area classification. ISPRS Journal of Photogrammetry and Remote Sensing, 66 (S6): S71–S84. [DOI: 10.1016/j.isprsjprs.2011.09.008]
-
Moskal L M and Zheng G. 2011. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sensing, 4 (1): 1–20. [DOI: 10.3390/rs4010001]
-
Na L. 2015. Typical forest community structure and fallen log characteristics in Inner Mongolia greater Khingan mountains. Hohhot: Inner Mongolia Agricultural University (娜丽. 2015. 内蒙古大兴安岭典型森林群落结构与倒木特征研究. 呼和浩特: 内蒙古农业大学)
-
Nyström M, Holmgren J, Fransson J E S and Olsson H. 2014. Detection of windthrown trees using airborne laser scanning. International Journal of Applied Earth Observation and Geoinformation, 30 : 21–29. [DOI: 10.1016/j.jag.2014.01.012]
-
Olofsson K, Holmgren J and Olsson H. 2014. Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm. Remote Sensing, 6 (5): 4323–4344. [DOI: 10.3390/rs6054323]
-
Polewski P, Yao W, Heurich M, Krzystek P and Stilla U. 2015. Detection of fallen trees in ALS point clouds using a Normalized Cut approach trained by simulation. ISPRS Journal of Photogrammetry and Remote Sensing, 105 : 252–271. [DOI: 10.1016/j.isprsjprs.2015.01.010]
-
Pyle C and Brown M M. 1999. Heterogeneity of wood decay classes within hardwood logs. Forest Ecology and Management, 114 (2/3): 253–259. [DOI: 10.1016/S0378-1127(98)00356-9]
-
Rowell E M, Seielstad C A and Ottmar R D. 2016. Development and validation of fuel height models for terrestrial Lidar – RxCADRE 2012. The International Journal of Wildland Fire, 25 (1): 38–47. [DOI: 10.1071/WF14170]
-
Rubino D L and McCarthy B C. 2003. Evaluation of coarse woody debris and forest vegetation across topographic gradients in a southern Ohio forest. Forest Ecology and Management, 183 (1/3): 221–238. [DOI: 10.1016/S0378-1127(03)00108-7]
-
Sandberg D V, Riccardi C L and Schaaf M D. 2006. Fire potential rating for wildland Fuelbeds using the fuel characteristic classification system. Canadian Journal of Forest Research, 37 (12): 2456–2463. [DOI: 10.1139/X07-093]
-
Wang D, Hollaus M, Puttonen E and Pfeifer N. 2016. Automatic and self-adaptive stem reconstruction in landslide-affected forests. Remote Sensing, 8 (12): 974 [DOI: 10.3390/rs8120974]
-
Weinmann M, Jutzi B and Mallet C. 2014. Semantic 3D scene interpretation: a framework combining optimal neighborhood size selection with relevant features. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, II-3 : 181–188. [DOI: 10.5194/isprsannals-II-3-181-2014]
-
Weinmann M, Urban S, Hinz S, Jutzi B and Mallet C. 2015. Distinctive 2D and 3D features for automated large-scale scene analysis in urban areas. Computers and Graphics, 49 : 47–57. [DOI: 10.1016/j.cag.2015.01.006]
-
Xin W W. 2012. Research on Daxing’anling Larix Regeneration of Fallen Tree Characteristics and Update Mechanism. Hohhot: Inner Mongolia Agricultural University. (辛魏巍. 2012. 大兴安岭兴安落叶松原始林倒木特征及其更新机制研究. 呼和浩特: 内蒙古农业大学)
-
Yang L Y, Dai L M and Zhang Y J. 2002. Storage and decomposition of fallen wood in dark coniferous forest on the north slope of Changbai Mountain. Chinese Journal of Applied Ecology, 13 (9): 1069–1071. [DOI: 10.13287/j.1001-9332.2002.0248] ( 杨丽韫, 代力民, 张扬建. 2002. 长白山北坡暗针叶林倒木贮量和分解的研究. 应用生态学报, 13 (9): 1069–1071. [DOI: 10.13287/j.1001-9332.2002.0248] )
-
Yong K. 2008. Research on Feature Selection and Model Optinization of Random Forest. Harbin: Harbin Institute of Technology (雍凯. 2008. 随机森林的特征选择和模型优化算法研究. 哈尔滨: 哈尔滨工业大学)
-
Zhao Y S. 2013. Remote Sensing Application Analysis Principles and Methods. Beijing: Science Press (赵英时. 2013. 遥感应用分析原理与方法. 北京: 科学出版社)
-
Zheng G, Moskal L M and Kim S H. 2013. Retrieval of effective leaf area index in heterogeneous forests with terrestrial laser scanning. IEEE Transactions on Geoscience and Remote Sensing, 51 (2): 777–786. [DOI: 10.1109/TGRS.2012.2205003]


