


|
收稿日期: 2017-12-20
基金项目: 国家重点研发计划(编号: 2016YFC1400902, 2016YFC1400905, 2016YFC020070);国家自然科学基金(编号: 41775023, 61475141);浙江省自然科学基金杰青(编号:LR19D050001)
第一作者简介: 周雨迪,1993年生,男,博士研究生,研究方向为海洋激光雷达的理论和应用。E-mail:zhouyudi@zju.edu.cn
通信作者简介: 刘 东,1982年生,男,教授,研究方向为光电检测与激光雷达遥感。E-mail:liudongopt@zju.edu.cn
|
摘要
激光雷达在上层水体垂直廓线的遥感中展现出巨大优势。本文研制了一套高垂直分辨率的实时探测偏振激光雷达,提出了一种基于偏振激光雷达回波信号的反演算法,采用Fernald理论和多次散射原理反演非均匀大气—水体的衰减和退偏光学产品,以高效稳定地处理偏振激光雷达实验数据。展示了一个中国内陆水体激光雷达探测实例,观测到了两次气溶胶积聚现象和一次水体浑浊现象。对实验数据的分析表明,退偏比主要由前向多次散射和后向单次散射产生的退偏两部分组成。当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。
关键词
光学遥感, 激光雷达, 漫射衰减系数, 偏振, 多次散射
Abstract
The ocean covers more than 71% of the Earth. Studies on vast oceans are of great significance for resource utilization and climate change. Several methods have been employed to detect the interior of the ocean. In-situ methods can accurately obtain marine information but their efficiency is limited. Ocean color remote sensing can collect global data. However, the limited information about the depth and dependence on natural light restrict its applications. Acoustics are widely used for seawater profiling, but they can only work under water due to the high loss in air–water interface. LiDAR is an effective method used to deal with seawater profiling with few limitations of platforms and natural light, in which its applicable coverage is from the water surface to the depth with several tens of meters. A polarized lidar with high vertical resolution (approximately 0.225 m in the water and 0.3 m in the atmosphere) and real-time detecting capability was developed to detect the profile information of atmospheric-water particulates. The laser was linearly-polarized to obtain the polarized information about the water column. Two refractive telescopes were used to collect the backscattering light from the water. Two polarizers were set in front of the telescopes, which only transmitted return signals that were co-polarized or cross-polarized with the laser. A retrieval algorithm based on polarized lidar returns was proposed to obtain atmospheric-water attenuation and depolarized optical products, such as, extinction coefficient (atmosphere), diffuse attenuation coefficient (water), depolarized ratio (atmosphere and water), forward depolarized coefficient (water), and backward depolarized ratio (water). An experimental sample from the inland water in Xiakou Reservoir, China during the night between April 6 and 7, 2017 was presented to discuss the physical meanings and scientific values of the optical products. The retrieved optical products presented the variation of atmospheric aerosols and water turbidity during the night. For the clear atmosphere, the depolarized ratio was approximately 0.01 and the extinction coefficient was approximately 0.08 m–1. However, they became 0.06 and 0.02 m–1, respectively, when the atmosphere was interrupted by several aerosols. For the water column, the diffuse attenuation coefficient varied from 0.6 m–1 to 0.4 m–1, depolarized ratio was from 0.6 to 0.4, and forward depolarized coefficient was from 0.06 m–1 to 0.02 m–1 when water turbidity became constantly clear after the rainfall. The analysis showed that depolarized ratio can be divided into depolarizations caused by forward multiple scattering and backward single scattering. Diffuse attenuation coefficient can be employed to describe the intensity of multiple scattering and is related to the depolarization caused by forward multiple scattering. Furthermore, depolarized ratio depends on the depolarization caused by forward multiple scattering when multiple scattering is strong. Otherwise, depolarized ratio depends on the depolarization caused by backscattering. A polarized lidar was developed to detect atmospheric-water particulate profile information. A retrieval algorithm based on polarized lidar returns was proposed to obtain atmospheric-water attenuation and depolarized optical products. An experimental sample from the inland water in Xiakou Reservoir, China was presented. High-range-resolution optical products were obtained, and the variations of aerosols and water were observed. The analysis presented that depolarized ratio can be divided into depolarizations caused by forward multiple scattering and backward single scattering. Furthermore, depolarized ratio depends on the depolarization caused by forward multiple scattering when multiple scattering is strong. Otherwise, depolarized ratio depends on the depolarization caused by backscattering.
Key words
optical remote sensing, lidar, diffuse attenuation coefficient, polarization, multiple scattering
1 引 言
自然水体占地球面积的71%,探测自然水体内部特性能够为全球气候变化、地球化学生物循环等研究提供重要的数据(Balino 等,2001)。原位测量通过散射计、衰减计等设备直接接触并测量水体,是目前最主要的水体探测手段之一。这种方式具有较高的精度,但探测效率相对较低(Balino 等,2001)。被动遥感技术,如宽视场海洋观测传感器(SeaWiFS)等,能够提供全球尺度上的水色观测,却受限于探测深度和光照条件(Mao 等,2010)。声学探测在水体中广泛使用,如声呐等,可以主动探测水体廓线信息,但水气界面的高反射率使其无法工作于飞机和卫星平台。激光雷达是一种主动光学遥感设备,能够穿透水气界面,获取上层水体垂直廓线信息,具有高时空分辨率、全天时、全天候的工作优势,在上层水体遥感中展现出巨大的优势(Vasilkov 等,2001)。
如今,激光雷达已成功应用于水深测量、水下目标成像、激光诱导荧光、海面粗糙度测量等领域,并在水温廓线探测中展现了巨大潜力(Shi 等,2008)。除此之外,激光雷达可以提供水体悬浮物垂直分布的信息,特别适合于鱼群、浮游植物层和海洋内波等水体分层现象的研究(Vasilkov 等,2001),且有望通过高光谱分辨率激光雷达技术进一步提高精度(Zhou 等,2017)。目前,国外在该领域已经成功研制了多台相对成熟的海洋偏振激光雷达系统,但国内的海洋激光雷达系统垂直分辨率、实时探测或偏振探测方面尚有不足。同时,从海洋激光雷达的数据处理依赖于简单的斜率法(Allocca 等,2002),仍然缺少一套成熟稳定的水体光学参数反演算法。
针对这些问题,研制了一套高垂直分辨率(大气中约0.3 m,水体中约0.225 m)的实时探测偏振激光雷达,用于探测底层大气和上层水体中的颗粒物垂直分布的光学特征。提出了一种基于偏振激光雷达回波信号的反演算法,可获得非均匀大气—水体的衰减和退偏光学产品。展示了一个中国内陆水体激光雷达探测实例和高距离分辨率的光学产品,并讨论了反演产品的物理含义和科学价值。
2 方 法
2.1 激光雷达系统
研制的偏振激光雷达系统主要由发射和接收两部分组成,如图1所示。发射部分主要由一台倍频调Q的Nd:YAG激光器组成,发射能量约为1 mJ、波长为532 nm的脉冲激光,脉宽为15 ns,重频为10 Hz。脉冲激光为线偏振光,经发散后射入水体。接收系统由望远镜、线偏振片、光阑、干涉滤光片、准直透镜、光电探测器等组成。望远镜采用两个口径为10 cm的折射式望远镜,用于收集大气及水体产生的后向散射光。两片偏振方向相互垂直的线偏振片分别置于两个望远镜的前方,选择性地透过偏振方向分别平行和垂直于出射激光偏振方向的后向散射光。干涉滤光片置于准直透镜后,用于滤除背景光。探测器位于干涉滤光片的后面,用于将光信号转化为电信号。信号电流经过高速采集卡模数转换后被记录在计算机中,采集卡在大气和水体中的距离分辨率分别为0.3 m和0.225 m,可以实时采集并处理实验数据。激光出射时的同步电信号用于触发采集卡的高速采集过程,采集卡的记录范围设置为触发信号到来前的100 ns至触发信号后的500 ns,从而对数据量进行了有效控制。偏振激光雷达的主要系统参数列于表1。
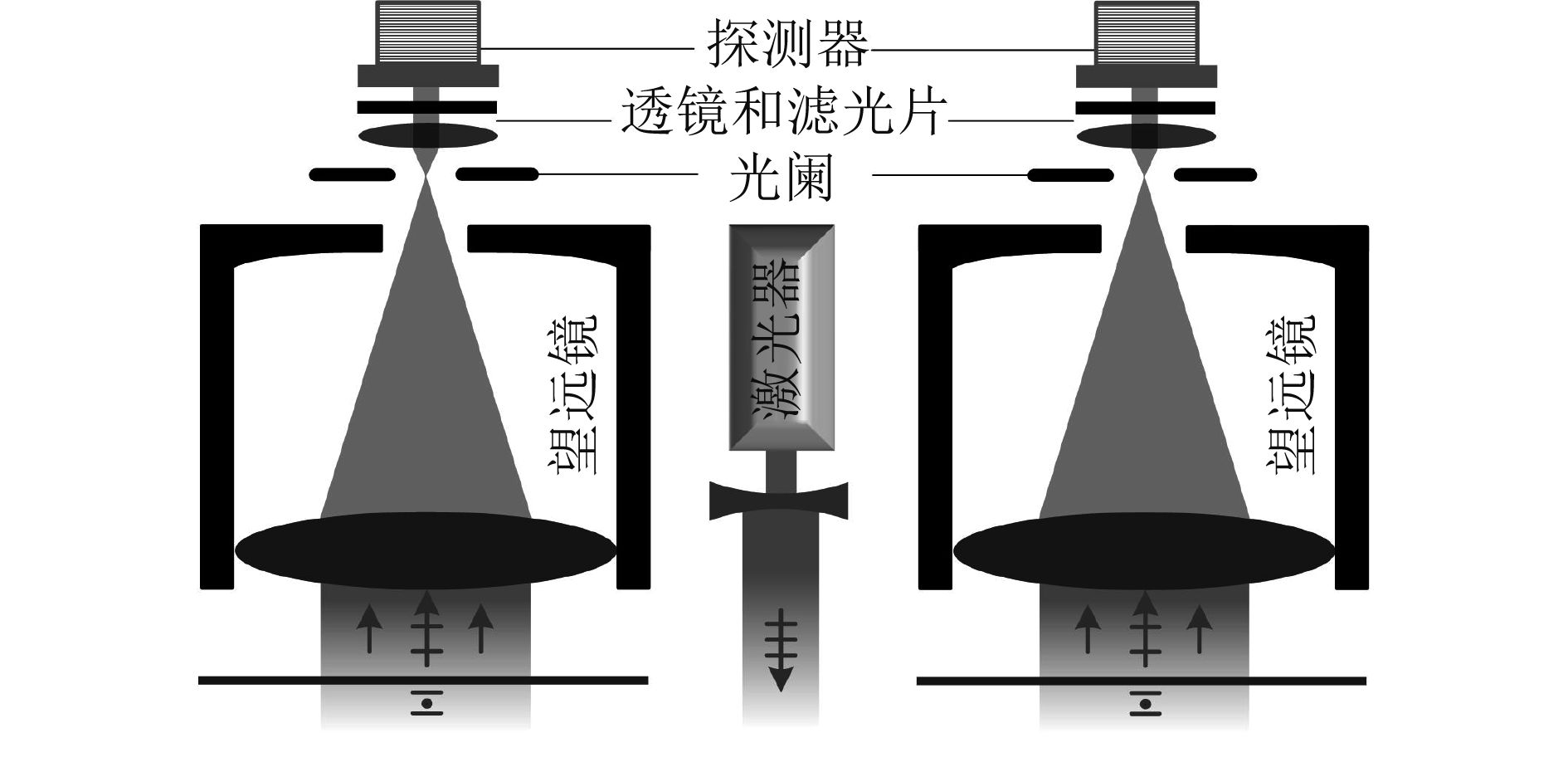

表 1 偏振激光雷达的系统参数
Table 1 Parameters of the polarized lidar system
| 参数 | 单位 | 数值 |
| 激光波长 | nm | 532 |
| 激光脉冲能量 | mJ | 1 |
| 激光脉宽 | ns | 15 |
| 激光重频 | Hz | 10 |
| 望远镜直径 | cm | 10 |
| 距离分辨率 | m | 0.3 (大气)
0.225 (水体) |
2.2 反演方法
标准的大气和水体的激光雷达方程可以表示为一个统一的形式(Vasilkov 等,2001)
| $\begin{aligned} P({\textit{z}}) = & {P^\parallel }({\textit{z}}){\rm{ + }}{P^ \bot }({\textit{z}}) = \\ & \frac{{AO({\textit{z}})}}{{G({\textit{z}})}}\left( {{\beta _{\rm{p}}}({\textit{z}}) + {\beta _{\rm{m}}}({\textit{z}})} \right) \times \\ & \exp \left( { - 2\int_0^{\textit{z}} {{\alpha _{\rm{p}}}(x){\rm{ + }}{\alpha _{\rm{m}}}(x){\rm{d}}x} } \right) \end{aligned}$ | (1) |
式中,
根据式(1),激光雷达方程同时依赖于气溶胶或悬浮物的衰减和后向散射光学特性,因而反演这些光学特性通常是一个复杂的问题。在标准米散射大气激光雷达中,常用的方法是假设散射颗粒的激光雷达比(Fernald,1984),相同的理论也可以应用于水体。理论与仿真表明,当激光雷达接收足迹较大时,激光雷达衰减系数趋向于漫射衰减系数(Gordon,1982)。故在水体中可近似用悬浮物和纯水的漫射衰减系数
| $\begin{aligned} {K_{\rm{d}}}({\textit{z}}) = & {K_{{\rm{dp}}}}({\textit{z}}) + {K_{{\rm{dw}}}}({\textit{z}}) = \\ & (1 - {R_{\rm{S}}}){K_{{\rm{dw}}}}({\textit{z}}) + \\ & \frac{{D({\textit{z}})\varPhi ({\textit{z}})}}{{\displaystyle\frac{{D({{\textit{z}}_{\rm{c}}})}}{{{K_{{\rm{dp}}}}({{\textit{z}}_{\rm{c}}}) + {R_{\rm{S}}}{K_{{\rm{dw}}}}({{\textit{z}}_{\rm{c}}})}} + 2\int_{\textit{z}}^{{{\textit{z}}_{\rm{c}}}} {D({\textit{z}})\varPhi ({\textit{z}}){\rm{d}}{\textit{z}}} }} \end{aligned}$ | (2) |
式中,
已有的研究表明,偏振激光雷达具有更优的信噪比、探测深度和动态范围。同时,偏振信息还与水体悬浮物或大气气溶胶的颗粒形状、粒径分布以及折射率密切相关,能够提供额外的水体或大气成分信息(Vasilkov 等,2001)。偏振激光雷达通过两个偏振正交通道接收水体的退偏信息,得到退偏比为
| $\delta ({\textit{z}}){\rm{ = }}\frac{{{P^ \bot }({\textit{z}})}}{{{P^\parallel }({\textit{z}})}}$ | (3) |
除此之外,在水体中,多次散射对退偏比的影响不可忽视。Chunside将退偏比近似为前向多次散射和后向单次散射产生的退偏两部分,在水体均匀的情况下,可以用前向退偏系数δf和后向退偏比δb对退偏比δ(z)进行线性拟合(Churnside,2008)
| $\delta ({\textit{z}}) = {\delta _{\rm{b}}} + 2{\delta _{\rm{f}}}{\textit{z}}$ | (4) |
即便水体的成分没有发生变化,退偏比仍然会随深度持续上升。根据式(4),可以额外得到两个水体整体光学特性,即后向退偏比和前向退偏系数。
3 实验与分析
3.1 测 量
实验场地位于浙江省的峡口水库,水库处于远离市区的仙霞群山之间,水质常年达到饮用水I类标准。激光雷达设备安装于水库的固定平台上,平台与水面的垂直距离约为15 m,激光发射方向与垂向夹角约30°,连续观测实验于2017年4月6日—7日的夜间进行,实验过程中的天气为中雨转小雨,夜间温度约为18℃,西风不高于3级。典型的两组激光雷达廓线示于图2,分别为不同水质状态下的激光雷达回波廓线,包括垂直通道和平行通道,均为600组(1 min)激光雷达回波信号的平均值。激光进入水体后会迅速衰减,考虑到系统噪声等因素对系统动态范围的限制,舍弃了低于系统探测下限的回波信号。随后,以平行通道的极大值对激光雷达回波信号强度进行归一化处理。
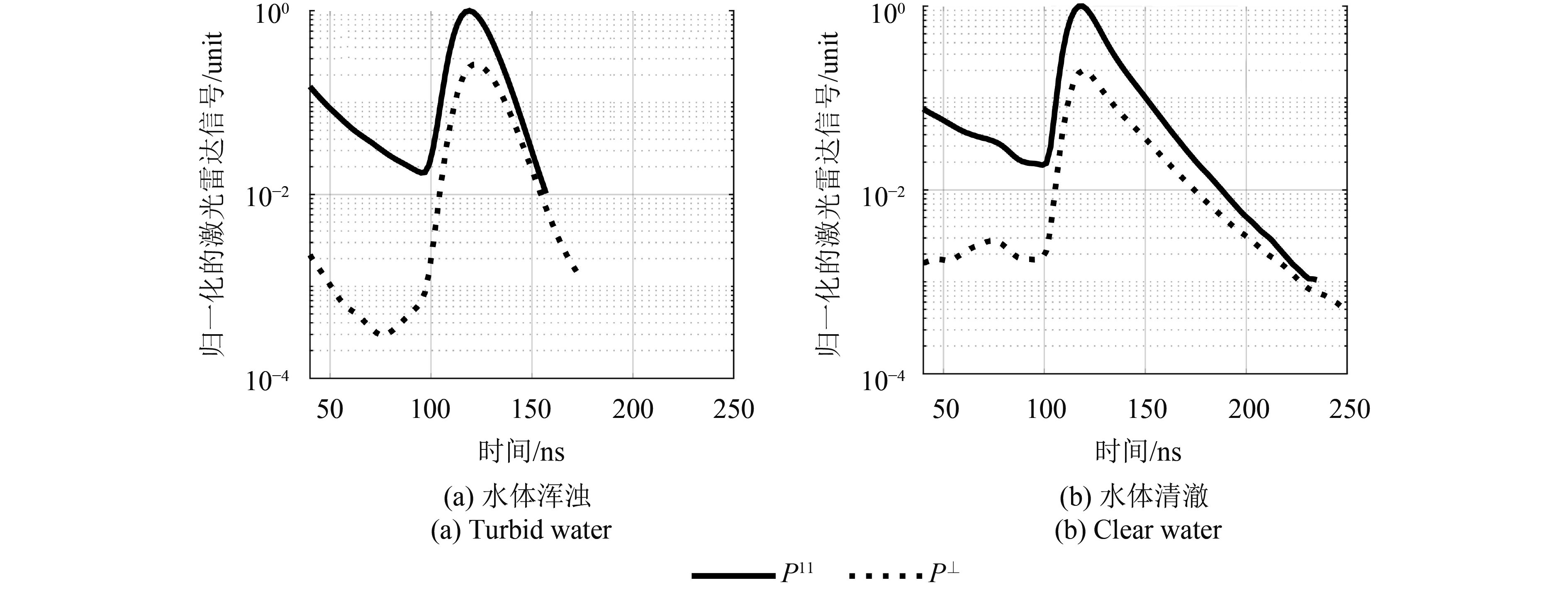
如图2所示,偏振激光雷达能够同时探测水体和大气特性,信号的有效时间段为40—250 ns,水面信号位于110 ns时刻。图2(a)的廓线表征了均匀的底层大气(40—110 ns)和浑浊的上层水体(110—175 ns)状态,而图2(b)的廓线显示出底层大气(40—110 ns)气溶胶浓度或成分发生了明显的变化,水体(110—250 ns)的透明度显著提高。由于信噪比的限制,图2(a)舍弃了175 ns的信号,而图2(b)中舍弃大于250 ns的信号。值得注意的是,不论水体清澈还是浑浊,平行通道的衰减系数总是大于垂直通道,其物理含义为:垂直通道接收到的激光雷达回波信号,在受到水体衰减的同时,也得到激光前向退偏的不断补充,从而在信号强度上比平行通道衰减得更慢。该实验结果与文献(Churnside,2008)的理论一致,验证了式(4)的正确性。
3.2 反演结果
图3示出了具有廓线信息的一级光学产品,包括大气消光系数、大气退偏比、水体漫射衰减系数、水体退偏比。本文重点关注光学参数,对大气和水体成分不做定量分析。由于激光雷达安装位置距离水面较近,假设大气气溶胶成分与海洋气溶胶相近,激光雷达比设为20 sr(Burton 等,2012)。假设实验水体悬浮物以浮游植物为主,利用平均的漫射衰减系数可以估算水体的激光雷达比(Churnside 等,2014)。大气和水体的退偏比可以从式(3)中推导出来,它可以配合激光雷达的衰减廓线进行大气或水体特性的分析。平行通道的极大值被定义为水面位置,为了避免水面信号和系统时域波形的干扰,去除高度3 m至水深2 m范围内的信号,信噪比不足的区域由黑色填充。在22:30至次日00:30之间水体浑浊,信号衰减较快,能够探测的深度只有5 m左右;而在其余时间段内,探测深度约为10 m。
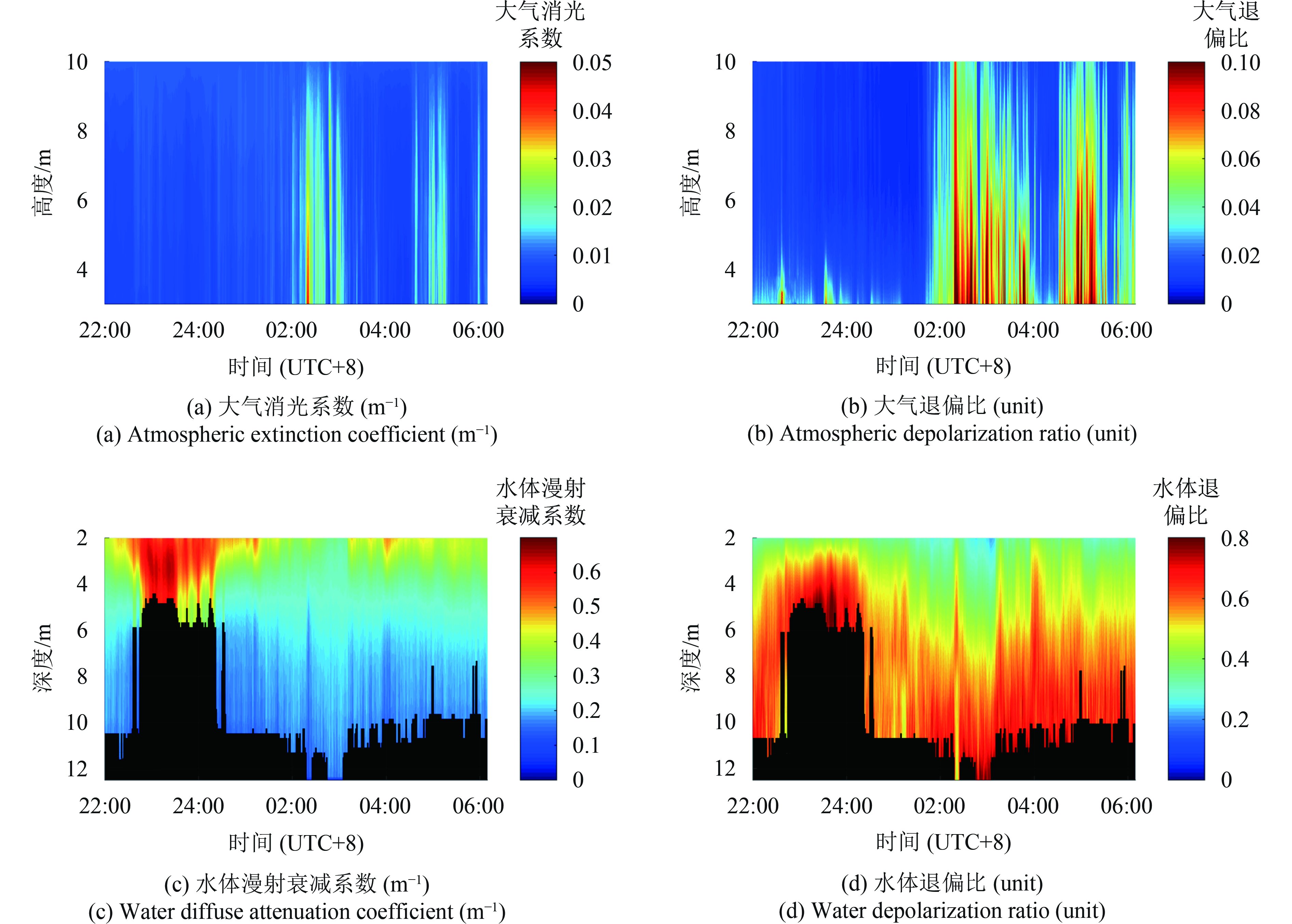
如图3所示,偏振激光雷达在02:00—03:00和04:30—05:00之间观测到两次气溶胶积聚现象。消光系数在水气界面的位置最高,随高度的升高逐渐减小,代表了水体悬浮物与大气气溶胶相互作用的过程。大气退偏比也随高度的升高而降低,可能是多次散射的影响,也可能是气溶胶在上升过程中物理性质发生了变化。在22:30—00:30观测到一次可能由降雨导致的水体浑浊现象,漫射衰减系数约为0.6 m–1,退偏比在2—4.5 m迅速从20%增加至80%。在水体清澈的时间段内,漫射衰减系数约为0.3 m–1,深水处的漫射衰减系数通常低于浅水,可能是由于水库中浮游植物在垂直方向上的聚集密度不同。同时,水体退偏比在2—10 m从20%增加至80%,低于水体浑浊时的增长速率。水体退偏比还存在周期性增强现象,可能与水中物质的微物理变化和水气物质交换过程相关。
图4表示了偏振激光雷达的大气—水体二级产品,包括大气平均消光系数、大气平均退偏比、水体平均漫射衰减系数、水体平均退偏比、水体前向退偏系数和水体后向退偏比。图4所示的二级产品由图3中的一级产品处理得到,大气平均消光系数和平均退偏比为高度3—8 m大气光学特性的均值,水体平均漫射衰减系数、平均退偏比、前向退偏系数和后向退偏比来自于深度2—4.5 m的水体数据,反演算法能够稳定工作于所有时间段内。图4(a)清晰示出了两次气溶胶的积聚现象,大气退偏比和消光系数具有明显的时间相关性。图4(b)示出了水体光学产品随时间的变化,平均漫射衰减系数和平均退偏比显示,22:30—00:30水体明显浑浊。在这段时间内,浑浊水体中激光传输的多次散射效应增强,增大了前向退偏系数,进而导致了平均退偏比的显著上升。在00:00之后,清澈水体中多次散射效应减弱,后向退偏比的大小逐渐成为平均退偏比的决定因素,漫射衰减系数和前向退偏系数对平均退偏比的影响减弱。在这段时间内,水体平均退偏比会产生周期性波动,每隔40—60 min出现一个退偏比峰值,后向退偏比的变化与该现象吻合度较高,可能是水体悬浮物的微物理特性发生了变化。

3.3 分 析
3.2小节不仅分析了激光雷达产品在时间—空间上的特征,还简单讨论了激光雷达大气—水体二级产品间的相关性,本节将以统计分析的方式进一步研究二级产品间的相关性。图5显示了大气—水体的退偏特性与衰减特性之间的关系,大气退偏比与消光系数的相关性较弱,可决系数R2约为0.48,而水体退偏比与漫射衰减系数之间存在很强的相关性,可决系数R2约为0.78。该相关性的差异可归结于大气和水体中多次散射效应的不同。在大气中,多次散射效应较弱,气溶胶固有退偏特性会显著影响大气退偏比的大小。因此,反映多次散射效应的大气消光系数与退偏比的相关性较弱,如图5(a)所示。反之,在水体中,反映多次散射效应的水体漫射衰减系数与退偏比的相关性较强,如图5(b)所示。
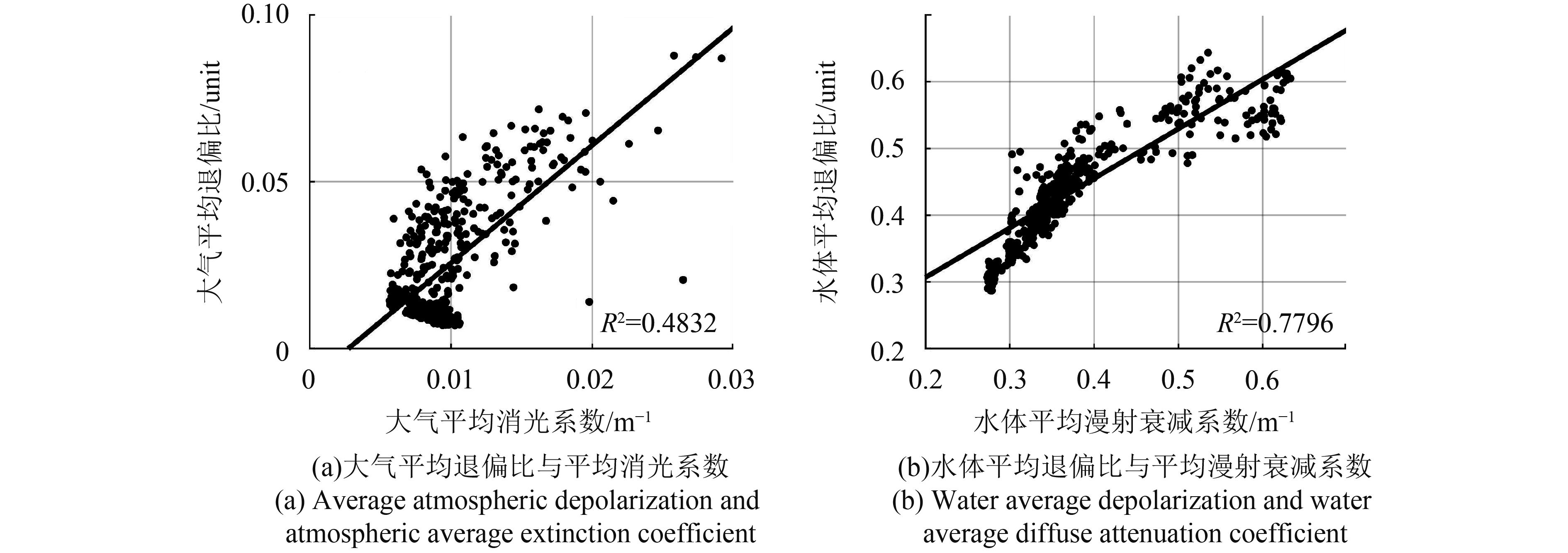
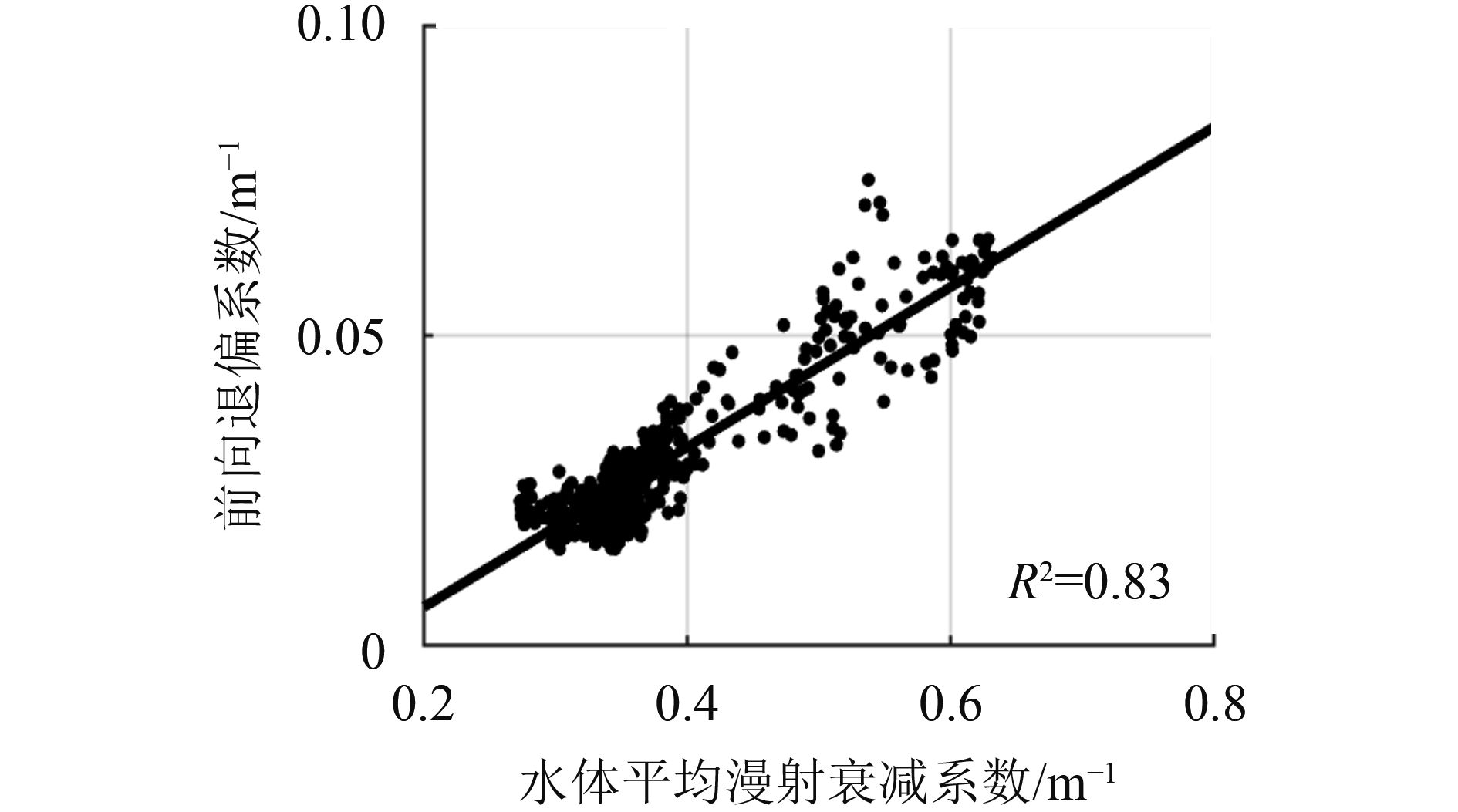
图6示出了前向退偏系数与漫射衰减系数的相关性,相较于图5(b),减少了后向单次散射退偏对退偏特性的干扰。如图6所示,可决系数R2显著提升至0.83,同时,拟合曲线与实验散点没有明显偏离,而在图5(b)中,当漫射衰减系数较低时,实验散点明显偏离拟合曲线。图6和图5(b)对水体退偏特性与水体漫射衰减系数的统计分析显示,水体平均退偏比与平均漫射衰减系数有着较高的相关性,究其本质,对于散射体性质较为稳定的水库水体,假设单次散射比近似为常数,则平均漫射衰减系数能够反映多次散射的强度,与水体前向退偏系数高度相关。
进一步,分析平均退偏比与前向退偏系数、后向退偏比的关系。前向退偏系数与水体平均退偏比有着较强的相关性,其可决系数R2约为0.65,拟合曲线为如图7(a)所示的蓝色直线,参与拟合的数据为0—2.5 h(黑色圆点)和2.5—8 h(蓝色圆点)。如果在拟合时不考虑2.5—8 h的数据,前向退偏系数与平均退偏比的可决系数R2升高至0.77,保留的数据为黑色圆点,拟合曲线为黑色。因此,当水体浑浊时,退偏比与前向退偏系数有更强的相关性。相似地,如图7(b)所示,拟合所有时间段的数据点(黑色和蓝色圆点)后显示,平均退偏比与后向退偏比几乎不相关(蓝色直线)。如果排除0—2.5 h浑浊水体的数据,则显示出可决系数R2约为0.67的相关性。根据图5—7的统计分析,漫射衰减系数可以被用于描述水体的多次散射强度,从而与水体前向退偏系数高度相关。当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。
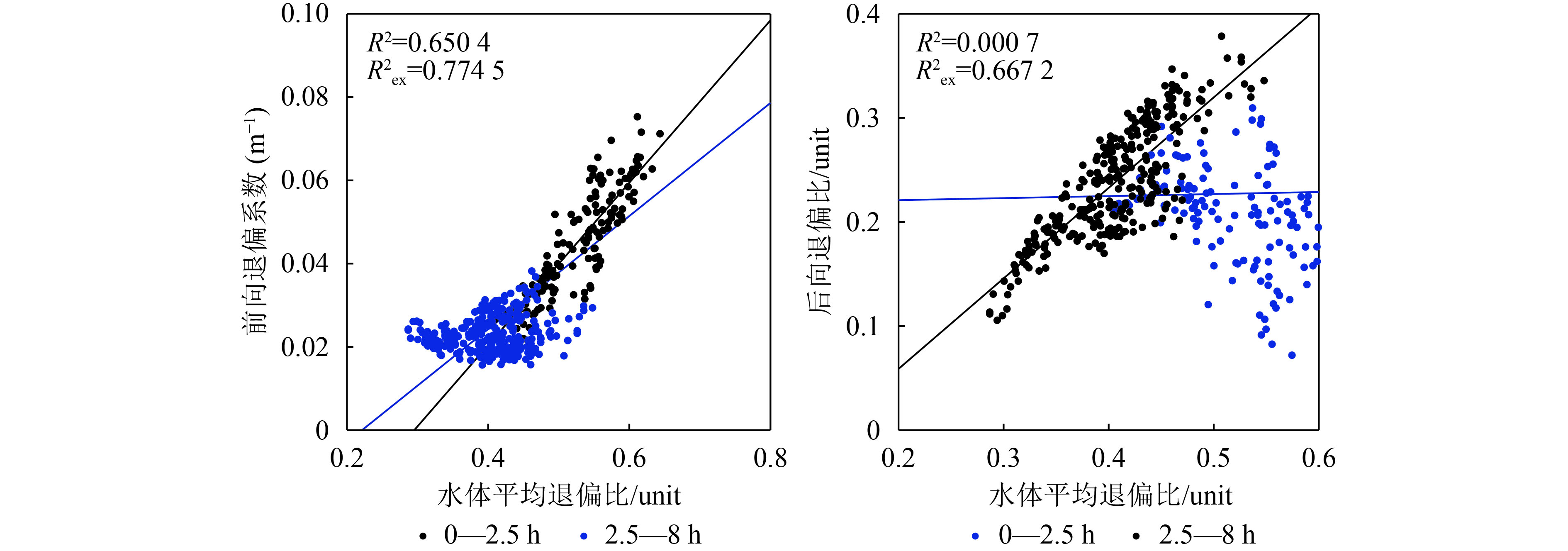
Chunside(2008)的实验发现,远岸水体的平均退偏比和前向退偏系数均与漫射衰减系数之间呈正相关,本文图5(b)和图6较高的可决系数R2支持了这一实验现象。同时,他发现近岸水体的多次散射退偏较弱,此时的平均退偏比主要由单次后向退偏决定。结合本文图7的实验结果,进一步得到本文结论,当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。
4 结 论
本文描述了一套研制的高垂直分辨率的实时探测偏振激光雷达系统,并基于该系统展示了一个激光雷达反演算法,可获得大气的消光系数和水体的漫射衰减系数,且能获得两者的退偏特性,包括退偏比、前向退偏系数、后向退偏比等。激光雷达探测了浙江省峡口水库的大气和水体变化情况,实验观测到了两次气溶胶的积聚现象和一次水体浑浊现象,反演产品在大气和水体中的距离分辨率分别为0.3 m和0.225 m。实验结果表明,偏振激光雷达能够快速实时探测大气—水体光学特性的垂直分布特征。
对实验数据的分析证明,退偏比主要由前向多次散射和后向单次散射产生的退偏两部分组成。对于散射体性质较为稳定的水库水体,假设单次散射比近似为常数,平均漫射衰减系数能够反映多次散射的强度。当多次散射强度较大时,退偏比的变化主要取决于多次前向散射退偏;反之,则主要依赖于单次后向散射退偏。
本文通过研制的偏振激光雷达获取了水体的光学参数,然而Fernald方法的应用中必须假设激光雷达比,限制了传统激光雷达的应用,未来将发展高光谱分辨率激光雷达(Zhou 等,2017),减小假设激光雷达比带来的误差。通过对实验数据的分析,本文认为漫射衰减系数可以代表前向多次散射退偏的强度,然而目前还没有成熟的方法可以从前向退偏中去除多次散射成分,得到固有的前向单次退偏特性,未来希望发展新体制的激光雷达定量评估退偏比中的多次散射成分。
志 谢 此次野外实验场地的安排得到了江山市峡口水库管理局、衢州市水利局、杭州市市政设施监管中心、临安市青山水库管理处等单位的协助与支持,在此表示衷心的感谢!
参考文献(References)
-
Allocca D M, London M A, Curran T P, Concannon B M, Contarino V M, Prentice J, Mullen L J and Kane T J. 2002. Ocean water clarity measurement using shipboard lidar systems//Proceedings of Ocean Optics: Remote Sensing and Underwater Imaging. San Diego, CA, United States: SPIE, 4488: 106–114. [DOI: 10.1117/12.452807]
-
Balino B M, Fasham M J R and Bowles M C. 2001. Ocean biogeochemistry and global change: JGOFS research highlights 1988-2000. IGBP Science, 2 : 1–32.
-
Burton S P, Ferrare R A, Hostetler C A, Hair J W, Rogers R R, Obland M D, Butler C F, Cook A L, Harper D B and Froyd K D. 2012. Aerosol classification using airborne high spectral resolution lidar measurements-methodology and examples. Atmospheric Measurement Techniques, 5 (1): 73–98. [DOI: 10.5194/amt-5-73-2012]
-
Churnside J H. 2008. Polarization effects on oceanographic lidar. Optics Express, 16 (2): 1196–1207. [DOI: 10.1364/OE.16.001196]
-
Churnside J H, Sullivan J M and Twardowski M S. 2014. Lidar extinction-to-backscatter ratio of the ocean. Optics Express, 22 (15): 18698–18706. [DOI: 10.1364/OE.22.018698]
-
Fernald F G. 1984. Analysis of atmospheric lidar observations: some comments. Applied Optics, 23 (5): 652–653. [DOI: 10.1364/AO.23.000652]
-
Gordon H R. 1982. Interpretation of airborne oceanic lidar: effects of multiple scattering. Applied Optics, 21 (16): 2996–3001. [DOI: 10.1364/AO.21.002996]
-
Mao Z H, Chen J Y, Huang H Q, He X Q and Gong F. 2010. Establishment of a hyperspectral evaluation model of ocean color satellite-measured reflectance. Science China Information Sciences, 53 (9): 1891–1902. [DOI: 10.1007/s11432-010-4048-z]
-
Mobley C D. 1994. Light and Water: Radiative Transfer in Natural Waters. San Diego: Academic Press: 74–135
-
Shi J, Ouyang M, Gong W, Li S and Liu D. 2008. A Brillouin lidar system using F–P etalon and ICCD for remote sensing of the ocean. Applied Physics B, 90 (3/4): 569–571. [DOI: 10.1007/s00340-007-2866-5]
-
Vasilkov A P, Goldin Y A, Gureev B A, Hoge F E, Swift R N and Wright C W. 2001. Airborne polarized lidar detection of scattering layers in the ocean. Applied Optics, 40 (24): 4353–4364. [DOI: 10.1364/AO.40.004353]
-
Zhou Y D, Liu D, Xu P T, Liu C, Bai J, Yang L M, Cheng Z T, Tang P J, Zhang Y P and Su L. 2017. Retrieving the seawater volume scattering function at the 180° scattering angle with a high-spectral-resolution lidar. Optics Express, 25 (10): 11813–11826. [DOI: 10.1364/OE.25.011813]


