

|
收稿日期: 2017-09-04; 优先数字出版日期: 2018-01-01
基金项目: 教育部装备联合基金项目(编号:6141A0226)
第一作者简介: 尤政,1963年生,男,教授,中国工程院院士,研究方向为精密仪器及机械、微电机系统(MEMS)的技术和应用。E-mail:yz-dpi@tsinghua.edu.cn
通信作者简介: 赵开春,1973年生,男,副研究员,研究方向为微纳卫星技术、微型仿生偏振姿态敏感器及集成技术。E-mail:kaichunz@tsinghua.edu.cn
中图分类号: TP701
文献标识码: A
|
摘要
偏振成像技术已经成为有效提升空间遥感信息应用能力的有力工具。通过模拟自然界的昆虫、鸟类及鱼类偏振视觉系统的信息感知与高精度导航机制,探索基于仿生偏振视觉环境信息感知与位置姿态测量中的科学问题。构建基于偏振成像目标特征与导航信息融合的仿生态势感知系统,建立了仿生信息感知与导航解算模型,提出基于生物偏振视觉的仿生信息感知与导航的信息融合与误差分析关键算法,设计实现一种空间环境特征感知及导航信息融合的态势感知系统原理样机,数据更新率高于25 Hz,角度测量重复精度优于0.05°。
关键词
偏振探测, 态势感知, 仿生视觉, 信息感知, 位姿测量
Abstract
The development of novel principle photoelectric detection system is an important part of the construction of space situation awareness system. The imaging polarimetry has become a powerful tool to enhance the information available in a variety of space remote sensing applications. This paper presents a new space situational awareness system by imitating the structure and function of biology in nature. Inspired by the information awareness and navigation mechanism of the insect, birds and fish, we explore the science problem about environments information awareness and location measurement by means of model simulation, prototype construction and experimental verification, which based on the bionic polarization vision system. Bionic situational awareness system which fused the polarization image feature and navigation information is suggested. The information fusion and error analysis model based on bionic information perception and navigation is presented. A situational awareness prototype fused space feature acquisition and navigation is built up, the data update rate is higher than 25 Hz, and the angle measurement repeatability is within 0.05°. Polarization imaging situational awareness system function experimental results show that the bionic polarization detection method can reveal more details about the target feature information and enhance the effect of space target detection effectively, which fused the target light intensity, polarization degree and polarization azimuth information.
Key words
polarization detection, situational awareness, bionic vision, information perception, position measurement
1 引 言
空间态势是指影响空间系统及其任务的外部客观条件,即空间各种客观条件的状态和变化趋势。空间态势感知就是对空间各种客观条件的状态和变化趋势的获取、认知和利用(耿文东 等,2015)。态势感知的过程可以理解为:通过“感”的相关设备和手段,获取空间环境及空间目标的有关要素,“知”道并理解空间态势,生成人们所需要的信息产品,服务于不同层次的信息应用者。结合美军2012版本空间作战条令,可以界定空间态势感知力量的地位为:空间态势感知是所有空间活动的基础,是新的战略威慑手段,是太空控制的关键,是联合作战的重要组成部分,是维护国家安全和国家利益所需要的作战力量(蔡幸福 等,2015;黄小红和姜卫东,2005),是衡量一个国家空间能力的重要标志。
太空态势感知体系结构主要由监视探测系统、太空态势感知中心和辅助支持系统组成。现有空间目标监视探测系统是由地基空间目标监视系统和天基空间目标监视系统共同构成。其中,地基空间目标监视系统的作用主要是利用地基光电观测、雷达探测、无线电侦测等手段,对太空目标进行搜索和跟踪,其技术成熟,搜索跟踪效果较好,但易受气象、地理位置和时间的限制,需进行坐标转换和气象参数修正等处理。采用将传感器部署在天基平台上的方式,可保证天基太空目标监视系统不受地理位置和气象条件的限制,其优势为良好的探测效果,和较强的战时生存能力。为增强太空控制能力,美国及其同盟国极度重视空间态势感知能力建设,已经将空间态势感知提升为独立的空间任务领域,并通过加强装备建设,发展一体化控制与指挥能力。在空天资源争夺战不断加剧的严峻形势下,中国急需加强空间态势感知体系建设,提升空间态势感知核心技术能力,研究开发新原理体制光电探测系统与装备。
地球上很多生物经过了亿万年的进化演变,严酷的自然选择使它们形成了许多原理简单,结构精巧,性能优异的组织与器官。这些生物为人类进行科学创新提供了丰富的灵感和技术参考。自然界中很多生物能够使用偏振视觉进行精确的环境感知和导航,分析研究这些昆虫的复眼结构与偏振敏感机制,模仿其结构与功能是研制开发新型态势感知系统的一条捷径。
2 生物偏振视觉
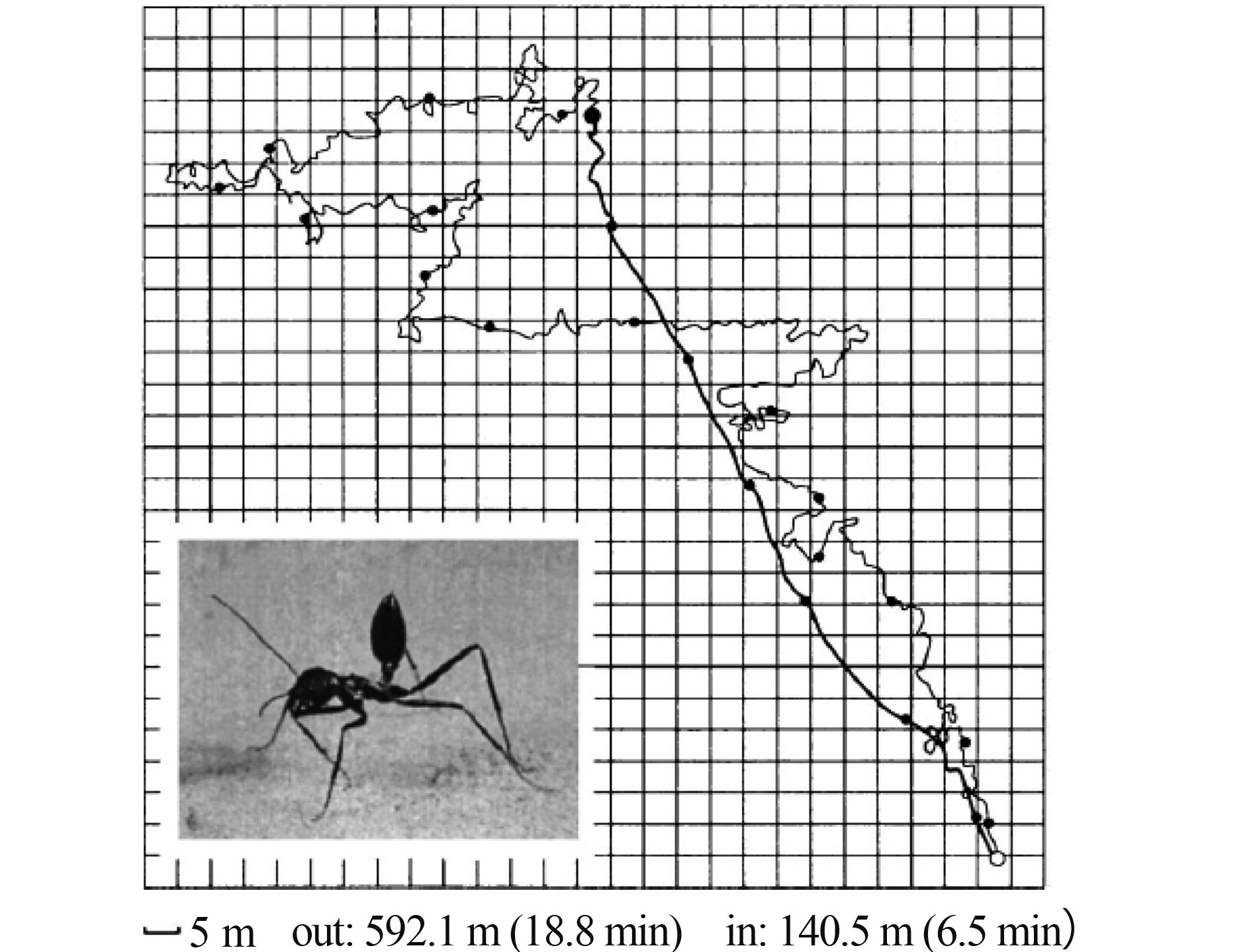
瑞士苏黎世大学Wehner等学者长期研究蜜蜂和沙漠蚂蚁等的导航行为,取得了显著成果(Wehner等, 1999, 2003;Wehner和Muller,2006)。实验表明蜜蜂、蟋蟀、沙漠蚂蚁等昆虫都可以感知天空偏振光信号,从天空偏振光模式分布图中提取导航信息。图1显示了沙漠蚂蚁的神奇导航本领,它们觅食的路径蜿蜒曲折,一旦搜集到食物后,便几乎沿着一条直线迅速返巢,无须借助沿途任何标记。

研究发现沙漠蚂蚁复眼背部边缘区域DRA(Dorsal Rim Area)神经感杆由9个感光器细胞构成(Homberg,2004)。感光器细胞上的微绒毛沿细胞长度方向整齐平行地排列着,能够敏感偏振光振动方位信息。在一个神经感杆结构中存在着两种敏感方向相互正交的感光器细胞。如图2为沙漠蚂蚁神经感杆结构的纵向剖面图2(a)和横向截面图2(b)。

Wehner等学者发现微绒毛严格有序地排列是高度偏振敏感特性的必要基础,微绒毛平行方向的敏感度是垂直方向的6—8倍,两组微绒毛正交结构能够有效放大兴奋抑制比(Wehner等,1999,2003;Wehner和Matter,2006)。
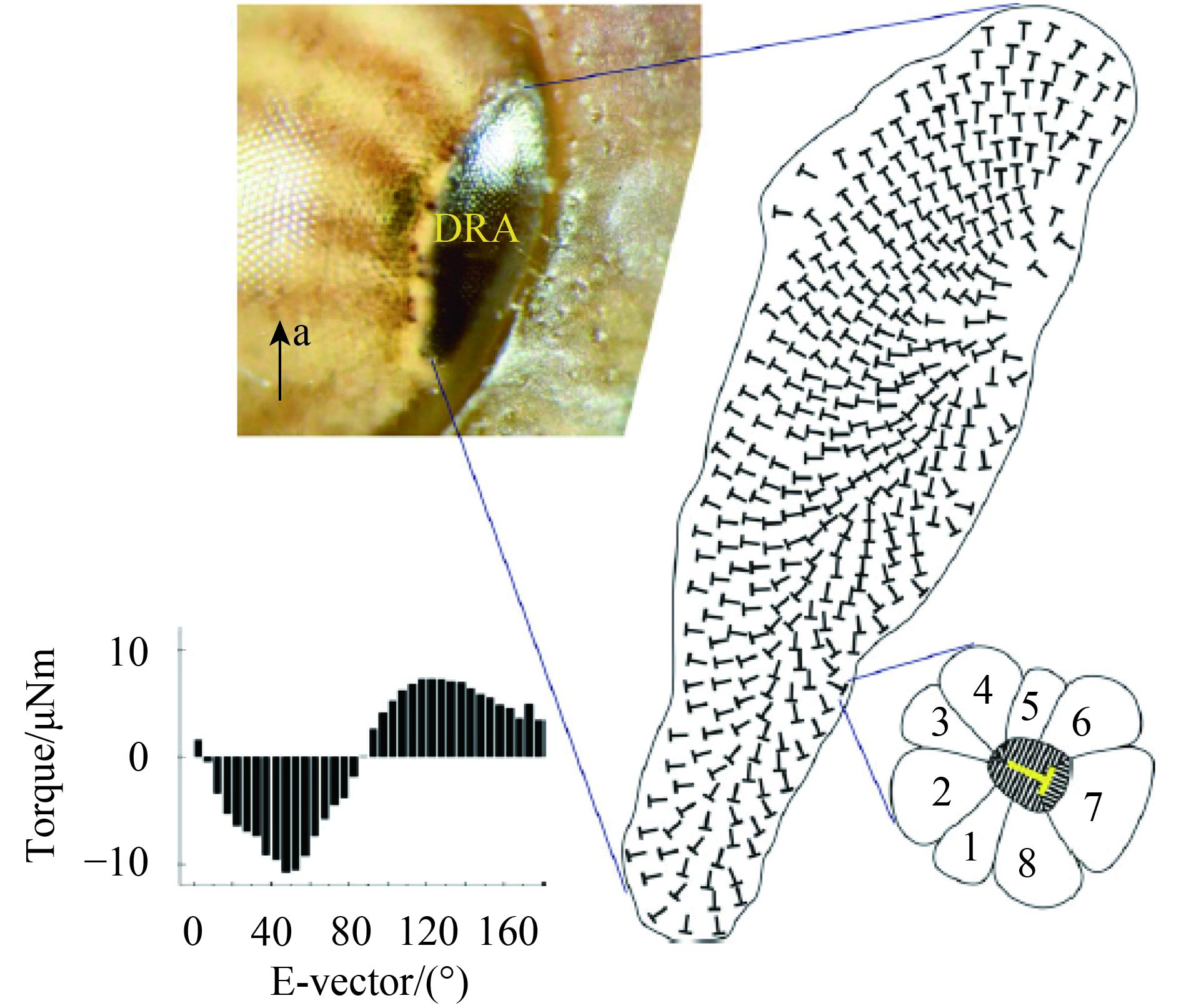
德国马尔堡菲利普斯大学Homberg等人(2004)发现蝗虫视觉系统中,每个神经感杆都连接着一个偏振对立神经元POL (Polarization-opponent neuron),能够处理感光器细胞所产生兴奋和抑制信号,输出类正弦曲线的响应。图3显示了蝗虫DRA中分布大量不同敏感方向的神经感杆以及一个偏振对立神经元的类正弦响应曲线。
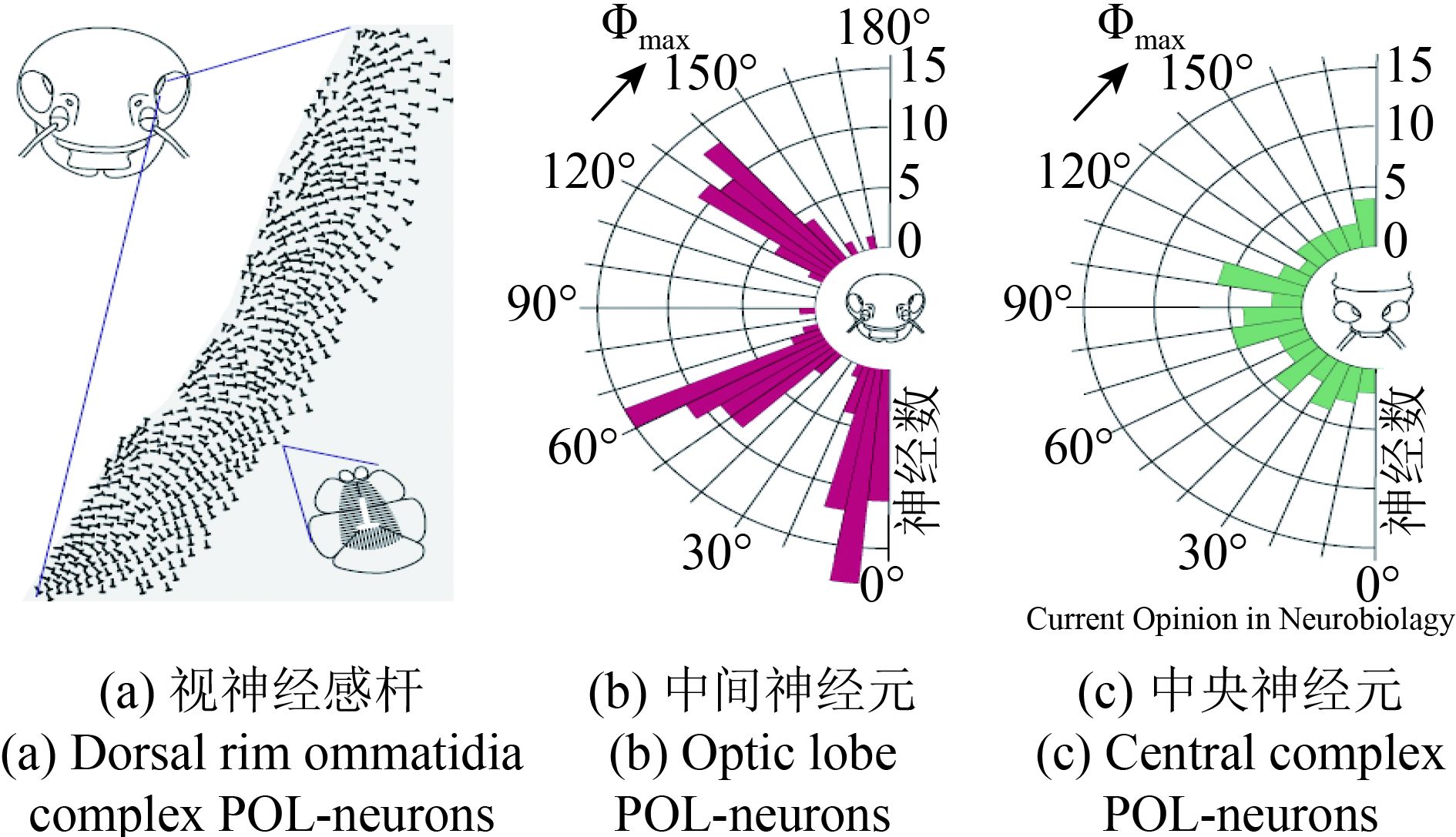
那么,昆虫是怎样利用偏振视神经系统感知体轴方向呢?生物学实验显示,当昆虫体轴与太阳子午线(偏振模式对称线)成某一个角度时,偏振视网膜的视神经感杆就产生不同的响应,其中方向和太阳子午线重合的视神经感杆对偏振光刺激的响应最大。大量的视网膜偏振敏感感杆的响应值作为输入汇合到中枢神经层的视神经叶部分。视神经叶部分的中间神经元分为3种类型,对视网膜的神经输入的响应也是正弦曲线,它们在体轴与太阳子午线之间夹角为0°,60°,120°时达到最大的响应值。根据3类中间神经元的不同响应值,昆虫的偏振视神经中枢经过计算和译码就可以得出体轴与太阳子午线的夹角,实现导航功能(图4)。
Labhart和Meyer(1999)总结了不同种类昆虫的DRA的结构特征,发现DRA功能原理极其相似,都存在相互正交微绒毛的神经感杆结构,并能够放大增强偏振方向信号,这表明许多昆虫能够利用天空偏振光分布模式进行有效的导航。图5分析对比了不同种类昆虫DRA的神经感杆在光学特征、光谱范围、感光器细胞数量、微绒毛种类数量、神经感杆横向截面的结构等特点。

3 仿生偏振成像态势感知探测系统解算模型与算法
3.1 偏振成像目标特征感知与导航解算模型
借鉴生物利用偏振视觉进行环境信息探测及导航的功能与机理,本文提出了一种综合利用偏振成像目标特征感知和导航的原理模型和原理样机。该系统可以同时获取无穷远目标的无偏振强度信息以及偏振度和偏振方位信息,经过软件系统解算及信息融合后可以提取目标的方位信息及目标特征信息。
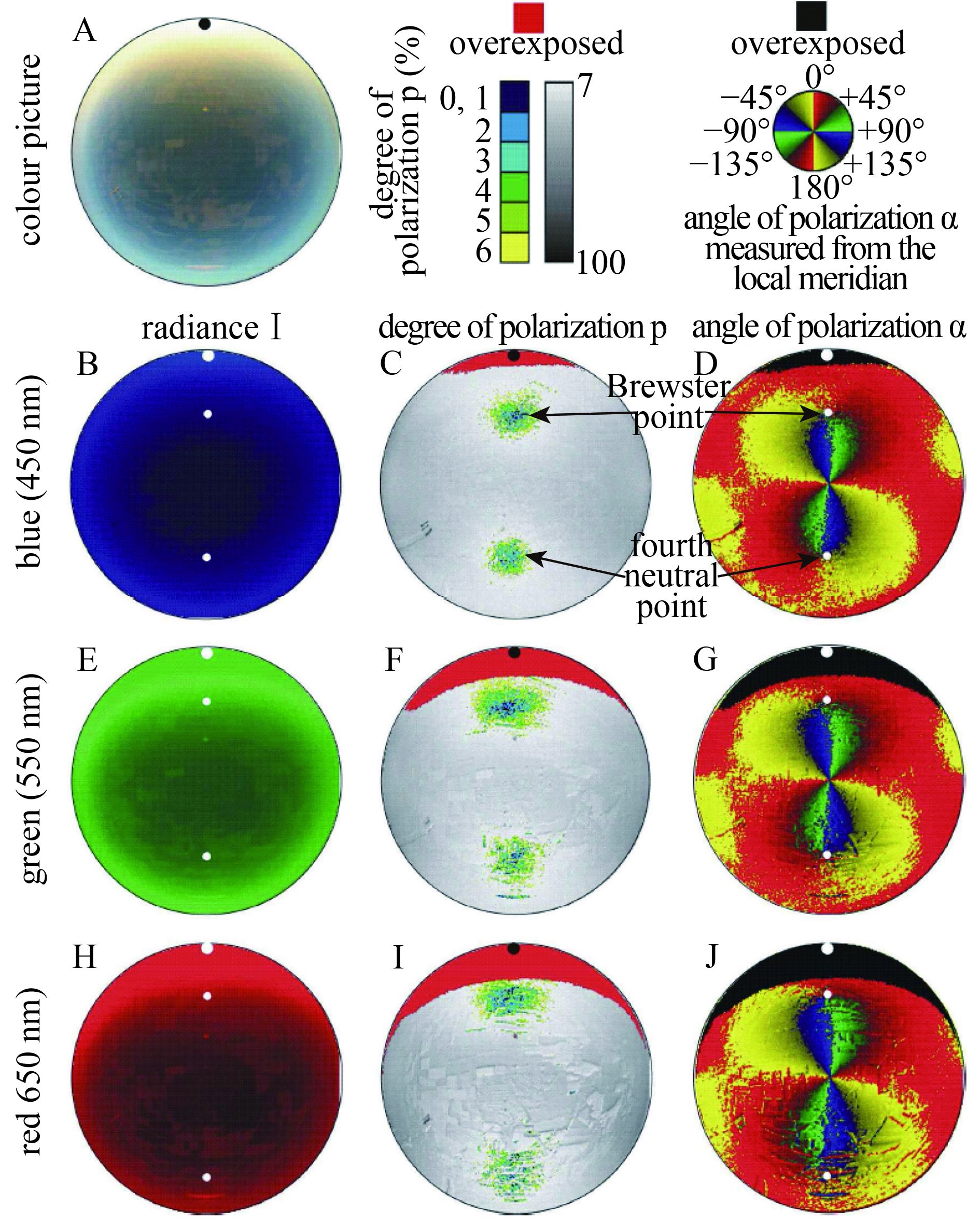
晴朗天气条件下的天空光偏振分布模式服从Rayleigh散射定律(图6),同时受到地物反射等影响。对天空光偏振分布特征信息的准确提取,有利于提高偏振光导航传感器的精度和抗干扰能力。当前偏振导航传感器的工作场景与模型基本上工作在大气层底部(地表的移动机器人或低空无人机),镜头面向天空进行偏振方位特征获取与分析。但有学者研究成果(McCullough,2006;Horváth,2003)表明,使用偏振成像探测仪器从数公里的近地空间到数百公里的外太空空间对地球成像,都呈现出类似于Rayleigh散射的偏振模式分布特征(图7)。
分析天空偏振分布模式的特征,发现太阳子午线作为天空偏振模式的对称线,经过太阳和天顶点,具有稳定性和唯一性,可以作为偏振导航的特征方向信息。提出了基于Hough变换的太阳子午线识别算法,并对算法的关键参数对识别的影响进行了建模与仿真,对算法的可行性与精度进行了实验验证。偏振信息探测单元由3个主轴角度为–90°,–45°和0°线性检偏器组成,其测量模型如式(1)所示:
| $\left[ \begin{array}{l}\!\!\! {{I}_{ - 90}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_{ - 45}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_0}\left( {i,j} \right) \!\!\! \end{array} \right] = \frac{1}{2}\left[ {\begin{array}{*{20}{c}}\!\!\! 1 & { - 1} & 0 \!\!\! \\\!\!\! 1 & 0 & { - 1} \!\!\! \\\!\!\! 1 & 1 & 0 \!\!\! \end{array}} \right]\left[ \begin{array}{l}\!\!\! {I}\left( {i,j} \right) \!\!\! \\\!\!\! {Q}\left( {i,j} \right) \!\!\! \\\!\!\! {U}\left( {i,j} \right) \!\!\! \end{array} \right]$ | (1) |
根据式(2),I,Q和U图像可以表示为一系列强度图像I–90,I–45和I0的线性变换(Wang 等,2014):
| $\begin{aligned} & \left[ \begin{array}{l}\!\!\! {{I}_{ - 90}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_{ - 45}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_0}\left( {i,j} \right) \!\!\! \end{array} \right] = \frac{1}{2}\left[ {\begin{array}{*{20}{c}}\!\!\! 1 & { - 1} & 0 \!\!\! \\\!\!\! 1 & 0 & { - 1} \!\!\! \\\!\!\! 1 & 1 & 0 \!\!\! \end{array}} \right]\left[ \begin{array}{l}\!\!\! {I}\left( {i,j} \right) \!\!\! \\\!\!\! {Q}\left( {i,j} \right) \!\!\! \\\!\!\! {U}\left( {i,j} \right) \!\!\! \end{array} \right] \xrightarrow[{inv}]{}\\&\left[ \begin{array}{l}\!\!\! {I}\left( {i,j} \right) \!\!\! \\\!\!\! {Q}\left( {i,j} \right) \!\!\! \\\!\!\! {U}\left( {i,j} \right) \!\!\! \end{array} \right] = \left[ {\begin{array}{*{20}{c}}\!\!\! 1 & 0 & 1 \!\!\! \\\!\!\! { - 1} & 0 & 1 \!\!\! \\\!\!\! 1 & { - 2} & 1 \!\!\! \end{array}} \right]\left[ \begin{array}{l}\!\!\! {{I}_{ - 90}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_{ - 45}}\left( {i,j} \right) \!\!\! \\\!\!\! {{I}_0}\left( {i,j} \right) \!\!\! \end{array} \right]\end{aligned}$ | (2) |
偏振角度AoP图像和线性偏振度图像由下式计算(Miyazaki 等,2010):
| ${AoP}' \!\! \left( {i,j} \right) \!=\!\! \left\{ \begin{array}{l}\!\!\!\!\! \displaystyle\frac{1}{2}\arctan \left(\!\! {\displaystyle\frac{{{U}\left( {i,j} \right)}}{{{Q}\left( {i,j}\right)}}}\!\! \right)\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{Q}\left( {i,j} \right) \! < \! 0\\\!\!\!\!\! \displaystyle\frac{1}{2}\arctan \!\! \left(\!\! {\displaystyle\frac{{{U}\left( {i,j} \right)}}{{{Q}\left( {i,j}\right)}}} \!\! \right) \!+\! 90^\circ \!\;\!\left( {{Q}\left( {i,j} \right) \! > \!\! 0} \right) \! \wedge \! \left( \!{{U}\left( {i,j} \right)\! \! <\! \! 0} \right)\\\!\!\!\!\! \displaystyle\frac{1}{2}\arctan \left(\!\! {\displaystyle\frac{\!{{U}\left( {i,j} \right)}\!}{{{Q}\left( {i,j} \right)}}} \!\!\right) \!-\! 90^\circ \!\!\;\!\!\left( {{Q}\left( {i,j} \right) \! > \! 0} \right) \! \wedge \! \left( {{U}\left( {i,j} \right) \! >\! \! 0\!} \right)\end{array} \right.$ | (3) |
| ${DoLP}\left( {i,j} \right) = \frac{{\sqrt {{{U}^2}\left( {i,j} \right) + {{Q}^2}\left( {i,j} \right)} }}{{{I}\left( {i,j} \right)}}$ | (4) |
定义偏振光的电矢量角度AoE图像(Angle of E-vector)为式(5)。
| ${AoE}\left( {i,j} \right) = {AoP}'\left( {i,j} \right) - \varphi $ | (5) |
该角度定义为电矢量相对于当地子午线的角度,φ为当地子午线相对于测量坐标系参考轴y的角度。
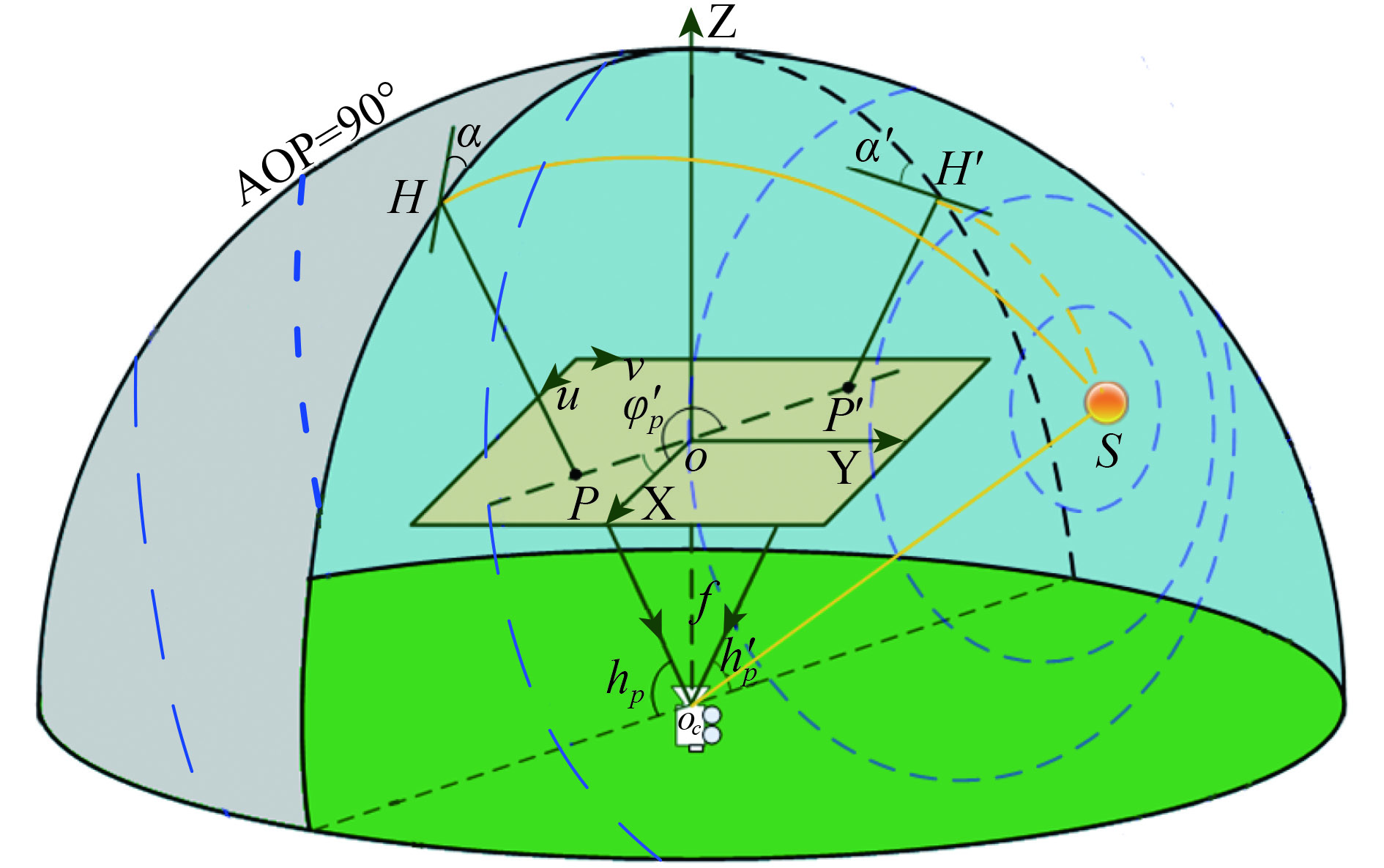
根据图8针孔相机模型,光学系统的焦距为f,被测光线h在传感器坐标系中的投影为
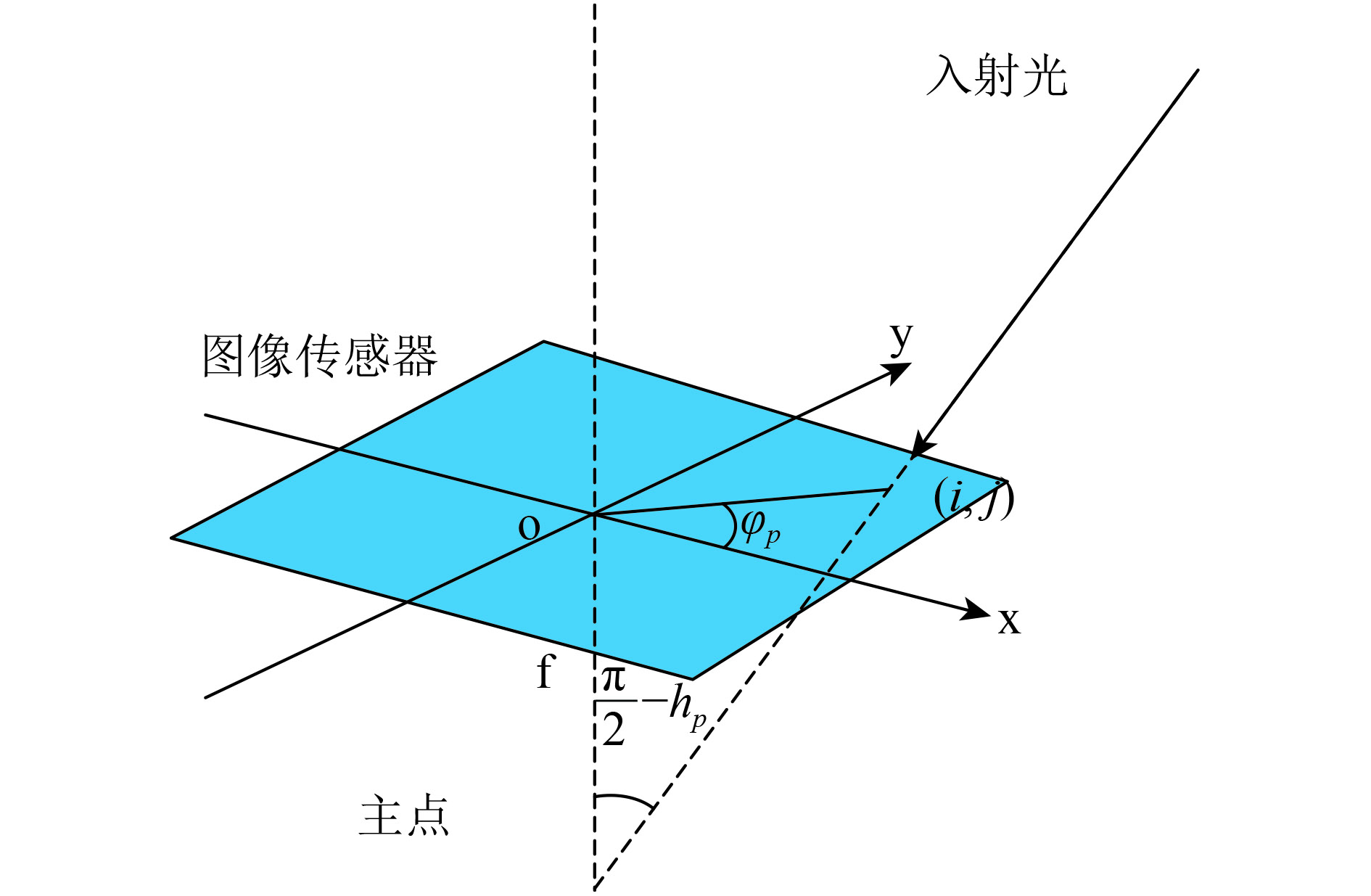
| $\sin \left( {{\varphi _{\rm{s}}} - {\varphi _{\rm{p}}}} \right) = \frac{{ - {{h}_{{\rm{xy}}}} \times {{s}_{{\rm{xy}}}}}}{{\left\| {{{h}_{{\rm{xy}}}}} \right\|\left\| {{{s}_{{\rm{xy}}}}} \right\|}} = \frac{{y\cos {\varphi _{\rm{s}}} - x\sin {\varphi _{\rm{s}}}}}{{\sqrt {{x^2} + {y^2}} }}$ | (6) |
| $\tan \alpha \!=\! \frac{{\left( {\cos \left( \!{{h_{\rm{p}}}}\! \right)\sin \left(\! {{h_{\rm{s}}}}\! \right) \!-\! \sin \left(\! {{h_{\rm{p}}}}\! \right)\cos \left(\! {{h_{\rm{s}}}}\! \right)\cos \left(\! {{\varphi _{\rm{s}}} \!-\! {\varphi _{\rm{p}}}} \!\right)} \right)\!\! \sqrt {{x^2} \!+\! {y^2}} }}{{\cos \left( {{h_{\rm{s}}}} \right) \cdot \left( {y\cos {\varphi _{\rm{s}}} \!-\! x\sin {\varphi _{\rm{s}}}} \right)}}$ | (7) |
综上,在偏振角度图像中,有且只有一条直线,其上的点的偏振角度均为90°,且该直线为太阳子午线。基于天空偏振分布图像目标特性阈值,基于投影线特征变换,利用(x, y)空间与参数 (ρ, θ)空间的对偶关系,将测量(x, y)空间中点集的参数的问题转化为参数空间中的极值,对阈值提取得到的图像中的偏振角度为90°的点的二值图像,进行直线特征的提取,得到太阳子午线的参数信息(图9)。

3.2 仿生偏振信息感知探测系统设计与构建
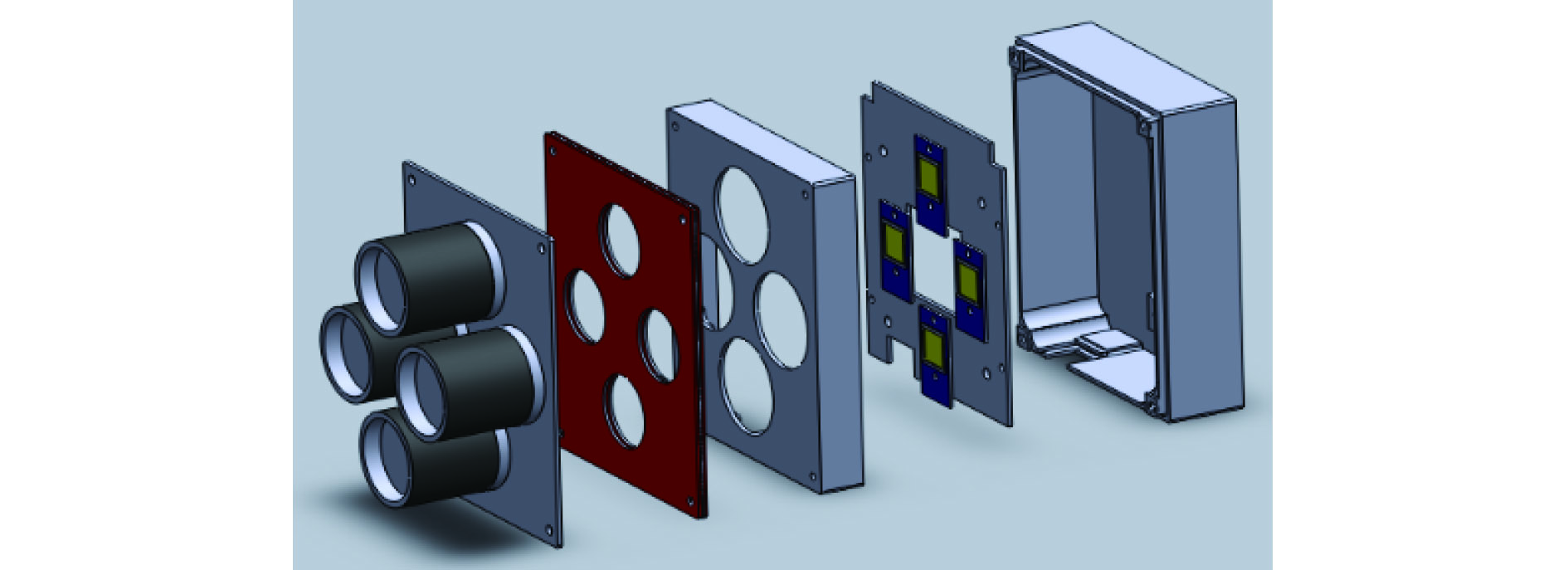
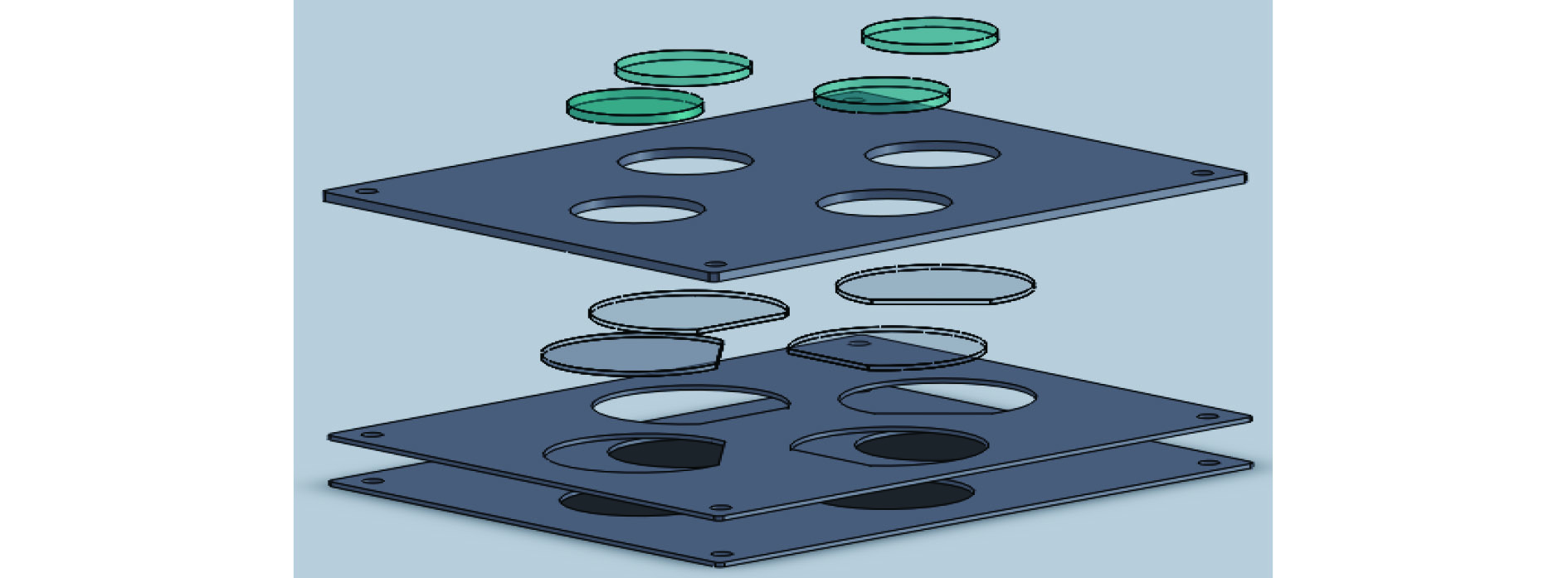
仿生偏振成像态势感知系统由4组性能参数相同的图像传感器构成,其中3个图像传感器构成一个偏振信息感知单元,第4个图像传感器构成一个无偏振图像单元,两个成像单元对无穷远同一目标成像,通过软件系统融合偏振与无偏振图像特征,进行环境探测与感知。其中,光学机械设计如图10所示,主要由传感器外壳,图像传感器,滤光片组件以及镜头构成。其中图像传感器与镜头的相对位置关系前壳体和中壳体的机械装配精度保证。后壳体仅起固定接插件和保护的作用。滤光片组合包含蓝紫色滤光片(波长:400—550 nm)和检偏器(消光比:1/1000)构成,其中检偏器的角度关系(0°,45°,90°)通过定位弦保证,如图11所示。
传感器的电子系统硬件采用Vision Component公司的VCSBCQuadro单板相机组件(Vision Components,2013)。该系统包含4个成像尺寸为0.85 cm,分辨率为640像素×752像素的CMOS成像传感器,成像传感器采集到的图像经由FPGA采集到系统的内存中,系统中集成的TI的DSP处理采集到的图像并解算得到导航参数(图12)。

成像式偏振导航传感器以天空散射光的分布特征作为导航参考,太阳子午线能够反映太阳矢量在传感器坐标系中的位置(Lu 等,2015)。由于嵌入式系统有限的系统资源,软件针对TI DSP的特点进行了优化设计,在Stokes参量空间中搜寻太阳子午线特征。软件算法的框图流程图如图13所示。

3.3 仿生偏振信息感知探测系统标定及性能测试
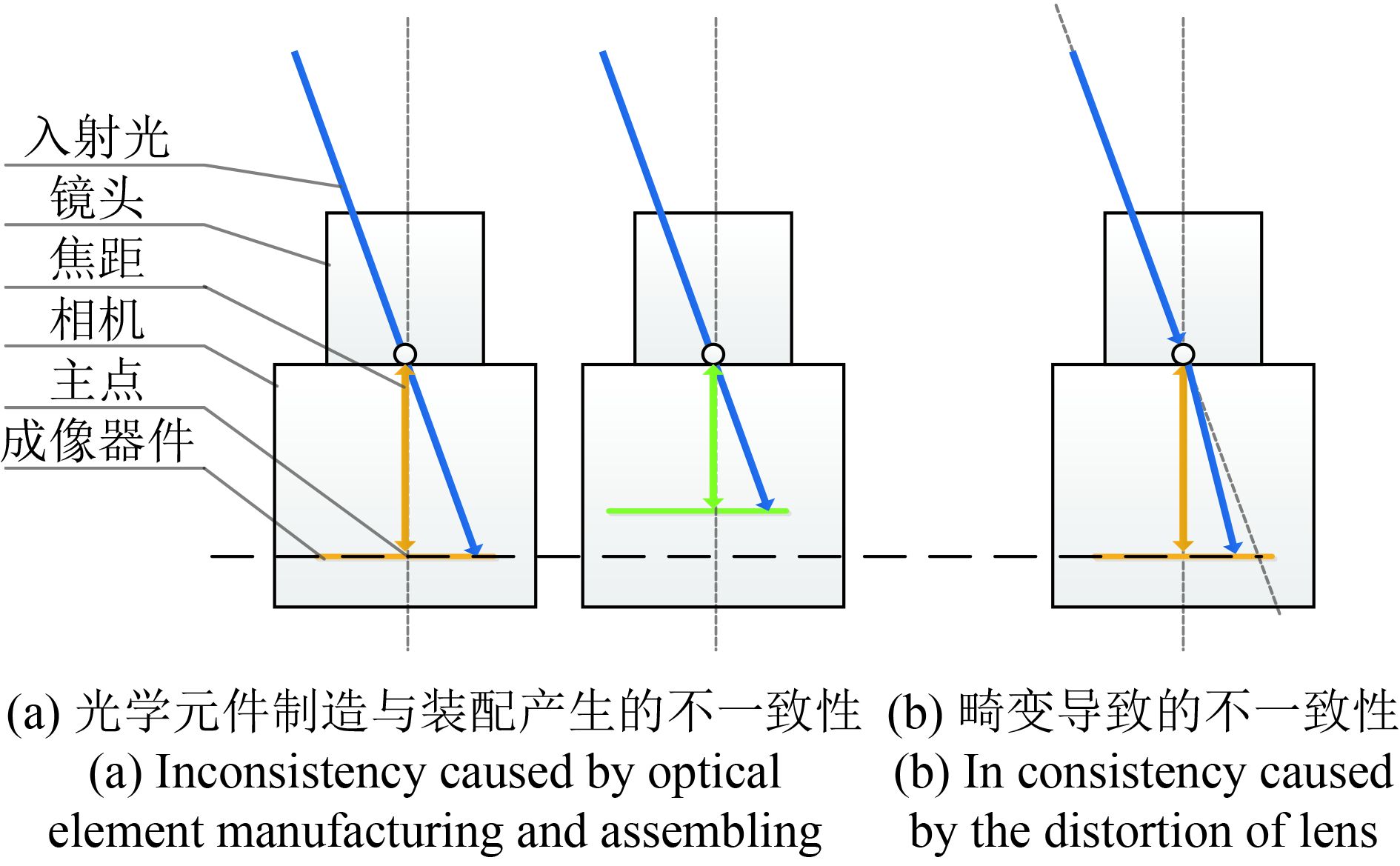
常规相机的标定步骤包括线性度,暗噪声以及平场校正等(Voss和Chapin,2005;Voss和Zibordi,1989)。多镜头偏振探测感知探测系统的不一致标定与校正是保证系统准确有效运行的重要前提,这些不一致性主要包括相机内参数、外参数的不一致以及CMOS响应的不一致。内参数的不一致性主要由镜头的制造过程和镜头,相机和感光元件的装配过程中产生的,如图14所示。外参数的不一致性是由多个相机的相对位置关系的偏差引起的,如图15所示。

由于天空光偏振导航是对无穷远的光线进行成像,因此适宜用球面坐标对世界坐标系中的光线进行描述。变换公式如式(8),(r, θ, φ)是世界坐标系中3维点的球面坐标。
| $s\left[ \begin{array}{l}\!\!\!\! u \!\!\!\! \\\!\!\!\! v \!\!\!\! \\\!\!\!\! 1 \!\!\!\! \end{array} \right] = \left[ {\begin{array}{*{20}{c}}\!\!\!\! {{f_{\rm{x}}}} & 0 & {{c_{\rm{x}}}} \!\!\!\! \\\!\!\!\! 0 & {{f_{\rm{y}}}} & {{c_{\rm{y}}}} \!\!\!\! \\\!\!\!\! 0 & 0 & 1 \!\!\!\! \end{array}} \right]\left[ {\begin{array}{*{20}{l}}\!\!\!\! {{r_{11}}} & {{r_{12}}} & {{r_{13}}} & {{t_1}} \!\!\!\! \\\!\!\!\! {{r_{21}}} & {{r_{22}}} & {{r_{23}}} & {{t_2}} \!\!\!\! \\\!\!\!\! {{r_{31}}} & {{r_{32}}} & {{r_{33}}} & {{t_3}} \!\!\!\! \end{array}} \right]\left[ {\begin{array}{*{20}{c}}\!\!\!\! {r\sin \theta \cos \varphi } \!\!\!\! \\\!\!\!\! {r\sin \theta \sin \varphi } \!\!\!\! \\\!\!\!\! {r\cos \theta } \!\!\!\! \\\!\!\!\! 1 \!\!\!\! \end{array}} \right]$ | (8) |
本文的标定过程中,多镜头系统对于天空光线的探测对于相机内参数矩阵A和相机外参数矩阵R都是十分敏感的。根据式(8),在对无穷远的像进行测量时,平移向量T的变化几乎不会对测量产生影响。
标定实验采用Matlab camera calibration toolbox,其中包含了张正友标定法(Zhang,2000)和双目标定方法。标定设备还包含一个棋盘格标定板。为了标定相机的内参数和外参数,包含检偏器的3个相机应同时对标定板进行曝光并保证标定板上所有角点均被包含在视场内。内参数和外参数标定的结果如表1所示。图14所示为校正前和校正后的AoE图像和BSM图像的对比。
表 1 内参数和外参数的测量值
Table 1 Measurements of internal and external parameters
| 参数 | 视场A | 视场B | 视场C |
| 内参数 | 主点(309.24, 335.32) | (290.94, 265.71) | (322.12, 380.84) |
| 主距(1391.81, 1392.42) | (1381.96, 1382.73) | (1376.81, 1377.49) | |
| 二阶畸变系数[–0.107, 0.334] | [–0.126, 0.344] | [–0.092, 0.160] | |
| 外参数RodPigues向量 | [0 0 0] | [–0.014 0.013 –0.002] | [–0.014 0.015 0.002] |
图16所示为原始图像直接计算和经过校正后计算的到的AoE和BSM(Binary image of Solar Meridian)图像,对比可见,未校正的图像中具有明显失真,太阳子午线的二值图像中的直线发生的弯曲;而校正后的图像更接近于理论上描述的太阳子午线和天空光偏振分布模式。

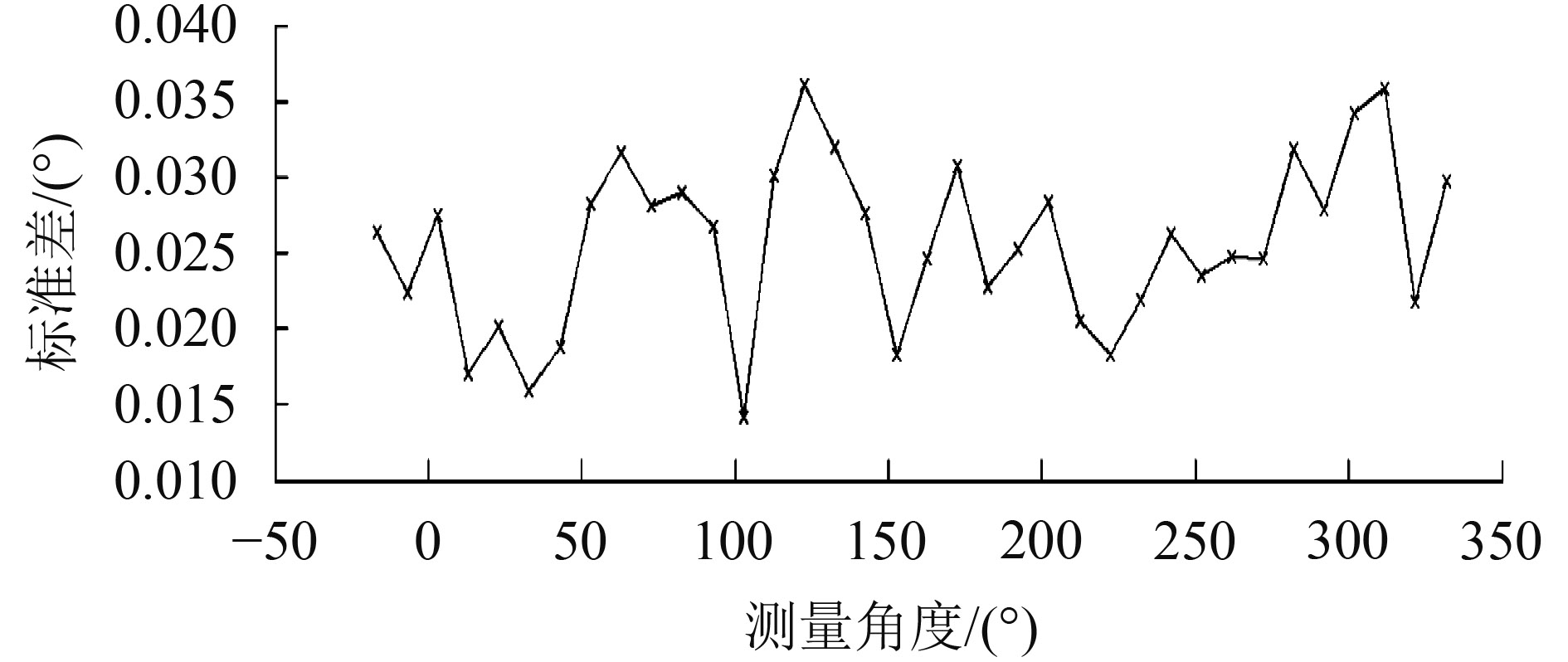
基于分视场天空光偏振成像传感器标定方法及北极星任意时角法(顾孝烈 等,2011)的传感器现场标定方法,经过系统标定后,偏振成像态势感知系统的偏振角度测量的输出误差噪声如图17所示,其噪声水平优于0.035°。
测量周期的统计直方图如图18所示,测量周期的所有数据的均值为0.0398 s,即数据更新率为25.104 Hz。

3.4 室外实验及讨论
为了验证仿生偏振探测系统的功能,进行了室外实验。
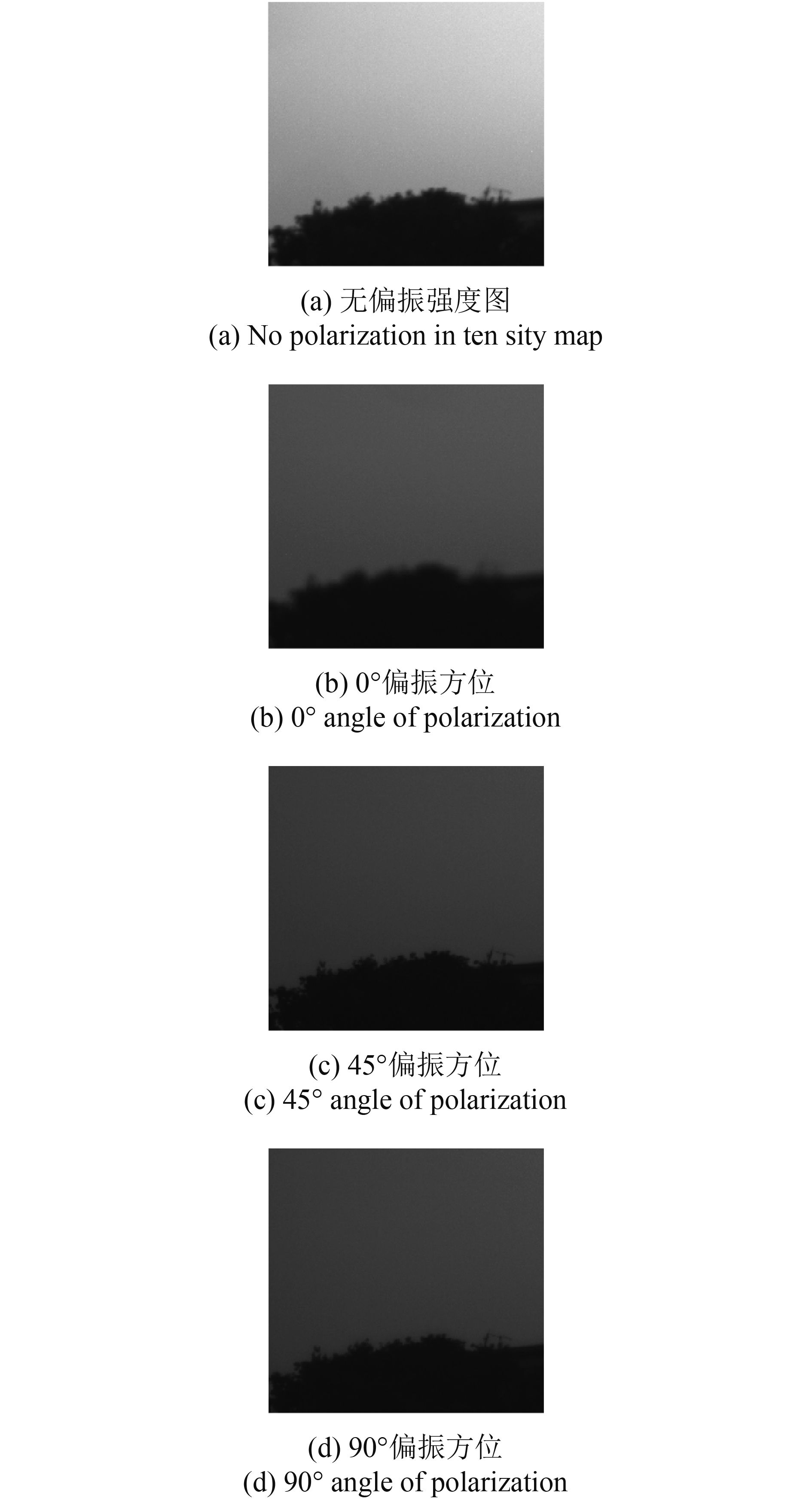
图19是2017-09-08 T 6:15时刻对清华大学中央主楼西侧的建筑、树木以及天空进行成像探测与分析解算。图19的4个子图分别为无偏振强度图、0°偏振方位、45°偏振方位及90°偏振方位图像。图20的2个子图分别为对应场景的偏振度以及经过Hough变换得到的偏振方位角度图像。强度图中目标信息可以从灰度值的高低进行判断,而从偏振度图中,可以发现天空、树叶、建筑物等不同目标的偏振度分布特点:天空背景的偏振度较高,偏振度高于0.13,连续分布,变化较小;树叶整体偏振度较低,低于0.05,而且偏振方位角度杂乱无序;树林外缘轮廓及建筑物边缘偏振度较高,且方位角度确定;从变换后的偏振方位角度图中,可以清楚的看到天空背景的偏振方位角度分布符合Rayleigh偏振散射分布特点,而图像下侧的树木树叶偏振方位角度则呈现出杂乱无序的特点。结合无偏强度图像、偏振度图像及模式变换后的偏振方位角度图像,可以获取目标中的更多细节信息。

4 结 论
针对太空态势感知系统核心技术的迫切需求,本文讨论了蜜蜂、蟋蟀、沙漠蚂蚁等昆虫视神经系统的敏感结构,分析了它们进行环境感知与精确导航的工作机制。提出了基于偏振成像目标特征与导航信息融合的仿生态势感知模型算法,构建了一种多视场仿生偏振信息感知探测系统,对其光机结构,电子学系统进行了设计,讨论了该系统的误差产生原因,并进行标定与补偿,使其有效获取近地空间目标无偏振强度和偏振图像信息,进而获取目标方位与特征信息,为态势感知提供支持数据。进行了系统功能的初步验证实验,结果表明融合无偏振强度信息、偏振度及偏振方位信息可以揭示探测目标中更多细节特征信息,能够有效增强空间目标探测的效果。标定测试结果表明,态势感知系统的数据更新率优于25 Hz,角度测量重复性精度优于0.035°。基于仿生偏振成像的态势感知探测系统模型能够提供一种融合光强度图像特征信息和偏振图像方位特征信息的方法,从而获取探测目标中隐藏的有价值的细节特征信息,为后续的解译判断及决策提供依据。本文的未来工作是进一步完善偏振成像态势感知系统的信息融合模型与标定方法,开展多样性空间目标偏振特征的感知、融合、解译及应用。基于仿生偏振成像探测的空间态势感知模型和方法将为态势感知系统体系建设提供一种可行的技术新途径和解决方案。
参考文献(References)
-
Cai X F, Zhang X M and Gao J. 2015. Characteristic analysis and recognition of space target. Xi’an: Northwestern Polytechnical University Press (蔡幸福, 张雄美, 高晶. 2015. 空间目标特性分析与识别. 西安: 西北工业大学出版社)
-
Geng W D, Du X P, Li Z, Ma Z H, Wu Y F and Geng G. 2015. Introduction to Space Situational Awareness. Beijing: National Defense Industry Press (耿文东, 杜小平, 李智, 马志昊, 吴钰飞, 耿歌. 2015. 空间态势感知导论. 北京: 国防工业出版社)
-
Gu X Y, Bao F and Cheng X J. 2011. Metrology. Shanghai: Tongji University Press (顾孝烈, 鲍峰, 程效军. 2011. 测量学. 上海: 同济大学出版社)
-
Homberg U. 2004. In search of the sky compass in the insect brain. Naturwissenschaften, 91 (5): 199–208. [DOI: 10.1007/s00114-004-0525-9]
-
Horváth G, Bernáth B, Suhai B, Barta A and Wehner R. 2002. First observation of the fourth neutral polarization point in the atmosphere. Journal of the Optical Society of America A Optics Image Science & Vision, 19 (10): 2085–2099.
-
Huang X H and Jiang W D. 2005. Periodic decision and extraction of RCS sequences for space targets. Aerospace Electronic Warfare, 21 (2): 29–30. [DOI: 10.3969/j.issn.1673-2421.2005.02.009] ( 黄小红, 姜卫东. 2005. 空间目标RCS序列周期性判定与提取. 航天电子对抗, 21 (2): 29–30. [DOI: 10.3969/j.issn.1673-2421.2005.02.009] )
-
Labhart T and Meyer E P. 1999. Detectors for polarized skylight in insects: a survey of ommatidial specializations in the dorsal rim area of the compound eye. Microscopy Research and Technique, 47 (6): 368–379. [DOI: 10.1002/(SICI)1097-0029(19991215)47:6<368::AID-JEMT2>3.0.CO;2-Q]
-
Lu H, Zhao K C, You Z and Huang K L. 2015. Angle algorithm based on Hough transform for imaging polarization navigation sensor. Optics Express, 23 (6): 7248–7262. [DOI: 10.1364/OE.23.007248]
-
McCullough P R. 2006. Models of polarized light from oceans and atmospheres of earth-like extrasolar planets. Astrophysical Journal, arXiv:astro-ph/0610518
-
Miyazaki D, Ammar M, Kawakami R and Ikeuchi K. 2010. Estimating sunlight polarization using a fish-eye lens. Information and Media Technologies, 5 (1): 164–176. [DOI: 10.11185/imt.5.164]
-
Vision Components. 2013. VCSBC Quadro Single Board Operating Manual. Vision Components
-
Voss K J and Zibordi G. 1989. Radiometric and geometric calibration of a visible spectral electro-optic " Fisheye” camera radiance distribution system. Journal of Atmospheric and Oceanic Technology, 6 (4): 652–662. [DOI: 10.1175/1520-0426(1989)006<0652:RAGCOA>2.0.CO;2]
-
Voss K J and Chapin A L. 2005. Upwelling radiance distribution camera system, NURADS. Optics Express, 13 (11): 4250–4262. [DOI: 10.1364/OPEX.13.004250]
-
Wang D B, Liang H W, Zhu H and Zhang S. 2014. A bionic camera-based polarization navigation sensor. Sensors, 14 (7): 13006–13023. [DOI: 10.3390/s140713006]
-
Wehner R. 1999. Large-scale navigation: the insect case // COSIT 1999: Spatial Information Theory. Cognitive and Computational Foundations of Geographic Information Science. Berlin, Heidelberg: Springer: 1–20 [DOI: 10.1007/3-540-48384-5_1]
-
Wehner R. 2003. Desert ant navigation: how miniature brains solve complex tasks. Journal of Comparative Physiology A, 189 (8): 579–588. [DOI: 10.1007/s00359-003-0431-1]
-
Wehner R and Muller M. 2006. The significance of direct sunlight and polarized skylight in the ant’s celestial system of navigation. Proceedings of the National Academy of Sciences of the United States of America, 103 (33): 12575–12579. [DOI: 10.1073/pnas.0604430103]
-
Zhang Z. 2000. A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22 (11): 1330–1334. [DOI: 10.1109/34.888718]


