
|
收稿日期: 2017-11-23
基金项目: 国家重点研发计划(编号:2017YFD0600904);中国博士后科学基金(编号:2016M601822);南京林业大学大学生实践创新训练项目(编号:2015sjcx023)
第一作者简介: 黄星旻,1995年生,研究方向为森林资源动态监测。E-mail:757758952@qq.com
通信作者简介: 孙圆,1976年生,副教授,研究方向为森林资源动态监测。E-mail:sunyuan1123@126.com
中图分类号: S771.8
文献标识码: A
|
摘要
以行道树无患子为研究目标,采用地面激光扫描(TLS)技术提取单木分回波点云数据。获取全波形数据、单目标数据、首次回波数据、其余次回波数据,建立基于多回波点云的算法,利用消光系数法提取不同投影分辨率0.01 m、0.02 m和0.03 m的的单株树叶面积指数(LAI)。利用2维影像数据数字半球影像(DHP)和LAI2200提取对应单株树的叶面积指数,进行比较分析,以检验其精度。结果表明:点云投影的分辨率与激光回波都对LAI有极显著影响,其中分辨率为0.02 m和0.03 m的估算结果与LAI2200所得估算结果相近,且差异不显著;单目标回波数据用于LAI的解算,可以同LAI2200的2维影像数据结果进行相互验证。使用单目标回波数据,0.02 m投影分辨率可以最大程度的保证单株LAI的精度,其与LAI2200测定的数据进行截距为0的线性回归,斜率达到0.827。本研究所做多回波地面激光数据计算叶面积指数的算法拓展了地面激光扫描的应用领域,为立木生长量信息准确提取和树木精确建模提供了重要的技术参考。
关键词
多回波, 地面激光扫描(TLS), 叶面积指数(LAI), 差异性分析
Abstract
This study aimed to extract the Leaf Area Index (LAI) of individual trees through multi-return terrestrial laser point cloud data, including single target, first-return waveform, intermediate, and last target data. The species was soapberry planted as street trees. An algorithm based on Beer–Lambert law was developed to divide return waveform, and the LAIs of individual trees with different projection resolutions of 0.01, 0.02, and 0.03 m were obtained. Two-dimensional digital hemispherical image data and LAI-2200 were used to extract the LAIs of corresponding single trees for accuracy comparison. Result shows that the resolutions and multiple return waveforms have significant influence on LAI. The results with 0.02 m and 0.03 m resolutions are similar to those obtained with LAI2200, and the difference is insignificant. However, the single target waveform point cloud data are used for the LAI solution and can be mutually verified with the results of the 2D image data of LAI2200. The LAI value of single target waveform point cloud was calculated with Beer– Lambert at 0.02 m resolution, and the intercept measured by LAI2200 data was subjected to a linear regression with an intercept of 0 and slope of 0.827, which is close to 1. Therefore, for the multi-return waveform ground laser scanning data, the single target waveform point cloud data with a projection resolution of 0.02 m can be used to obtain accurate LAI when using an extinction coefficient method. The algorithm for calculating the LAI based on multi-return waveform ground-based laser data in this study expands the application field of TLS and provides an important technical reference for the accurate extraction of the growth of standing trees and accurate tree modeling.
Key words
multi-return waveform, terrestrial laser scan, leaf area index, difference analysis
1 引 言
植被叶片的疏密程度常用叶面积指数LAI(Leaf Area Index)来表征(刘洋 等,2013)。LAI被定义为单位地表面积上绿叶表面积总和的一半(Chen和Black,1992),是重要的群落学参数,也是衡量群落结构是否合理的重要指标之一(马泽清 等,2008)。当叶面积增加到一定的限度后,田间郁闭,光照不足,光合效率减弱,产量反而下降。植物叶片的大小对光能利用、收获量及经济环境效益都有显著的影响(邹杰和阎广建,2010)。合理测定LAI,不仅是植被生长状况的重要指标,也是植被生长模型的重要输入参数。计算LAI最初是直接测量法,包括具毁坏性的树木解析法、落叶收集法、点接触法等。现在主流采用光学方法,属于间接测定方式,即通过测量其他相关参数来推算LAI(Pirotti 等,2013),与直接测量方法相比具有经济、高效等特点。目前间接法测定LAI可以分为两类:2维影像测定(采用数字冠层摄影DHP(Digital Hemispherical Photography)测定或采用LAI-2X00设备的光辐射测定)和3维激光测定(采用激光扫描点云数据测定)。最新的研究成果表明:2维测定的方法受到的影响因素较多即输入参数较多,导致估算结果并不理想,如光照强度影响图像阈值选取,冠幅内外层辐射获取的稳定性影响估算结果精度等(Calders 等,2018),而激光扫描则不受光线条件影响,利用冠层点云与地面点云间的关系可以得到更稳定的结果。随着激光扫描技术的发展,使用机载激光扫描ALS(Aerial Laser Scanning)数据提取林分结构的研究在区域范围展开(邢艳秋 等,2018),地面激光扫描TLS(Terrestrial Laser Scanner)则在单木结构提取上广泛应用(Pirotti 等,2013;Zhao 等,2015;Ma 等,2016, 2017;王洪蜀 等,2016;Yun 等,2016;Li 等,2017;Wilkes 等,2017;邓洋波 等,2017;Calders 等,2018),而多回波地面激光扫描作为最新的技术还在研究的起步阶段。Li等人(2017)提出利用其分波的穿透力可以更好地提供树冠空隙的测定,并从单站扫描结果入手解算立木LAI。Riegl VZ系列的地面多回波激光扫描仪采用回波数字化(echo - digitizing)技术(http://www.riegl.com/nc/products/terrestrial-scanning/[2017-11-23]),可以提供3到多次回波数据,记录每个发射激光脉冲的宽度和幅值及其特征,为地物分类和参数计算提供了可能,使得站点间的自动拼接、地形分离和植被高程滤波的算法都得到了改进(Li 等,2017;Ma 等,2017;Calders 等,2018)。对这个系列设备的林业调查样地设定研究表明,采用10 m×10 m的网格扫描样地,并且设置单站点与被测木距离小于10 m可以解决树高处枝干遮挡和冠层阻碍激光穿透的问题(Wilkes 等,2017)。同时多回波技术,与传统的一次回波仅能反映一个反射目标物体的技术相比,它可以探测到多重乃至无穷多重目标的极其详尽的细节信息(Yun 等,2016)。
本文的研究基于多站点多回波激光点云能够最大限度减少遮挡效应,充分表达立木冠层结构的点云为基础数据,解析分回波点云数据,建立单株立木LAI算法,解算不同回波数据在不同投影分辨率下提取LAI的精度,并结合2维影像(DHP和LAI-2200)测量得到的叶面积指数结果做分析,为该扫描技术提取叶面积指数建立合适的方法,以期提高LAI的提取精度,为后期同类研究提供参考。
2 方法
2.1 数据
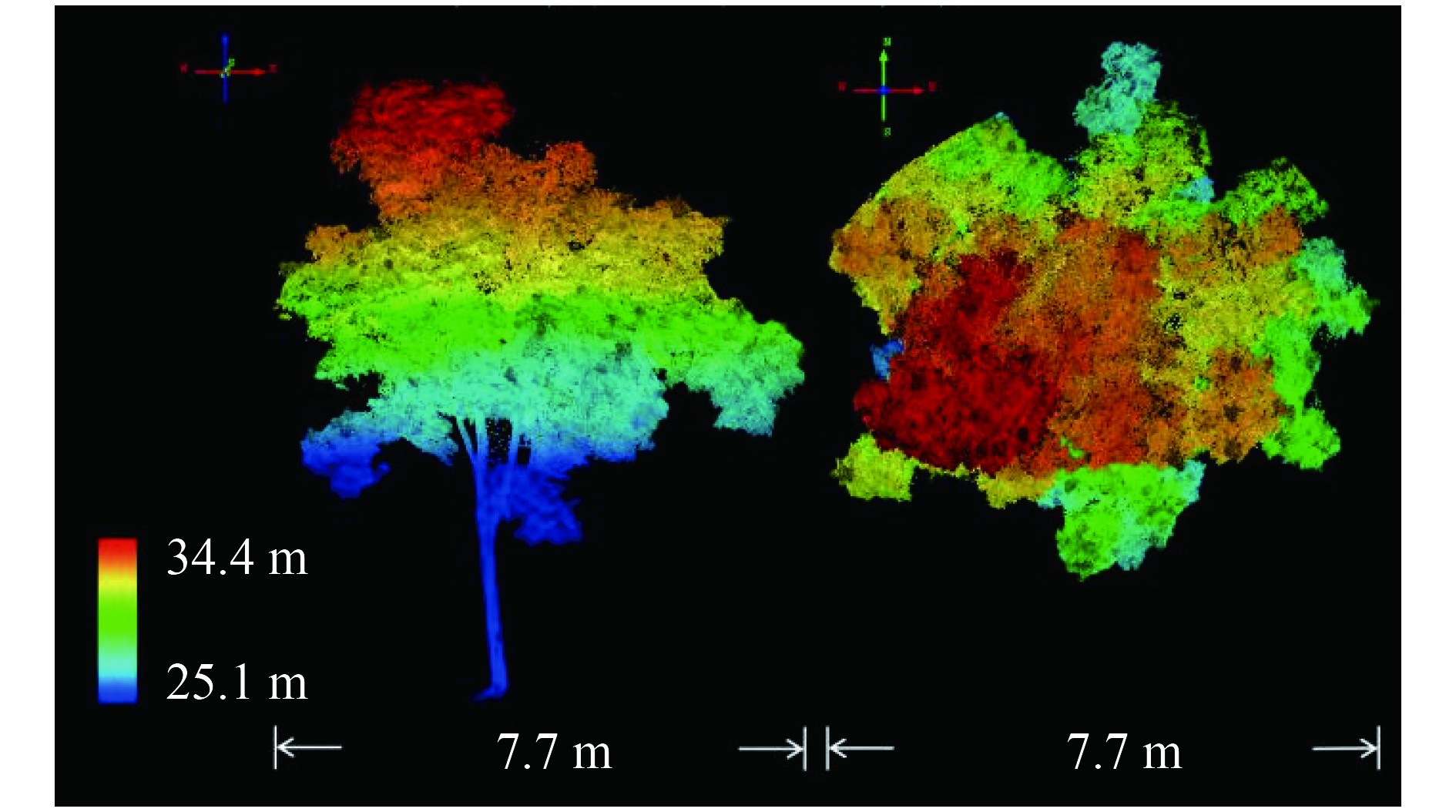
本研究选取无患子(Sapindus mukorossi Gaertn)为研究树种,样地大小10 m×20 m,被测样木为8株间距小于10 m的立木。使用地面激光扫描仪Riegl VZ-400 i,进行了16站扫描并且拼接得到样地整体数据。其中两个测站之间的距离小于仪器最大测量距离的1/10,即10 m(此时的扫描精度为2 mm)。站点分布如下图1所示。扫描点云的分波数据包括:单目标回波数据(single targets)即为激光第一次遇到物体后回波的数据,首次回波(first targets)为激光在物体边缘分波时回波的数据,其余的回波包括了分波后再遇到物体返回的数据(other targets)以及激光所遇到的最后物体回波的数据(last targets)(Pirotti 等,2013)。3维地面激光扫描仪RIEGL VZ-400 i提供理论最大800的测距能力和5 mm测量精度,其有效测量速率达122.000点/s。扫描视场范围为垂直100°,水平360°,通过多测站拼接得到所测样地的完整点云数据(http://www.riegl.com/nc/products/terrestrial-scanning/[2017-11-23])。全样地拼接精度小于0.02 mm。截取扫描样木的点云数据,如图2(b)俯视图和图2(a)正视图所示。本研究共取得8棵无患子,从左到右编号为1—8,如图2中圈出的样木为第5株,下文中数据与方法以这棵树为例。扫描后对每株立木采集了Hemiview鱼眼数码摄影数据和LAI2200数据。鱼眼设备由佳能Cannon EOS 50D单反相机、Sigma EX-DC 4.5 mm鱼眼镜头、Hemiview分析软件、SLM8自平衡支架和相机架组成。鱼眼镜头安置在立木胸径1.3 m处拍摄全天光照片,依次得到每株树正南北和正东西两个方向的照片(图3)。在同一时间段进行单木冠层分析仪LAI-2200的测量。将冠层分析仪设置为“1上4下”的采样方式,测量树冠上透射光线A值,选取180°的遮盖帽测量每株树冠下4个角度的B值,获取叶面积指数。所有立木结构数据概况如表1所示。
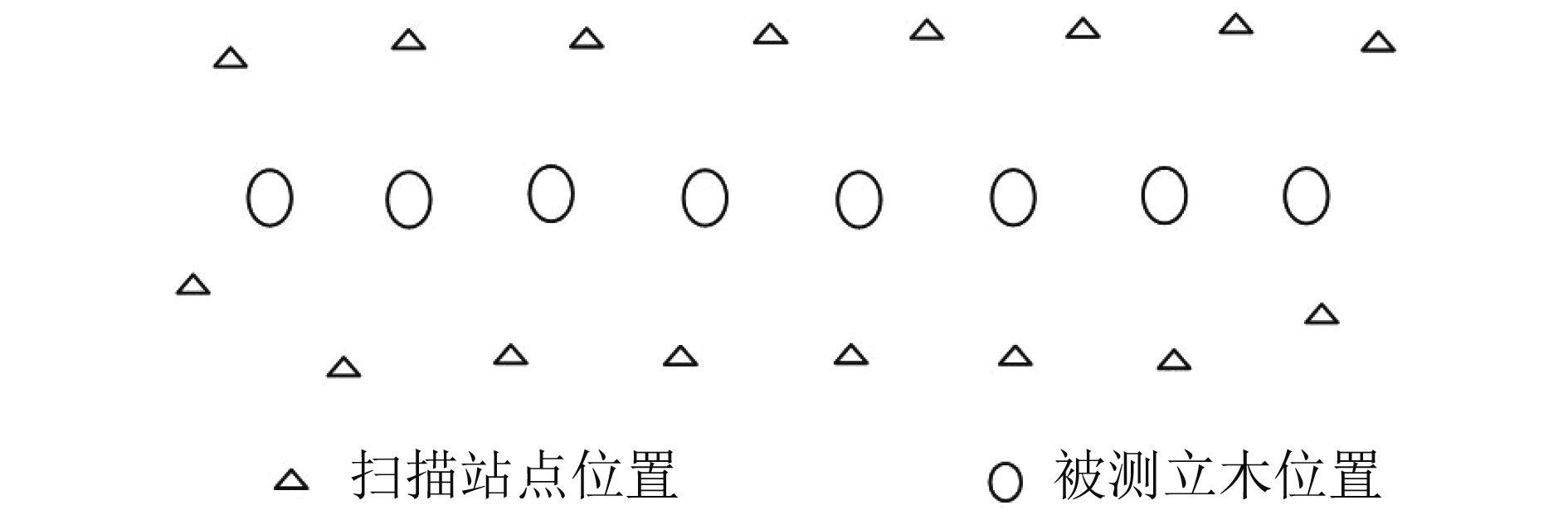

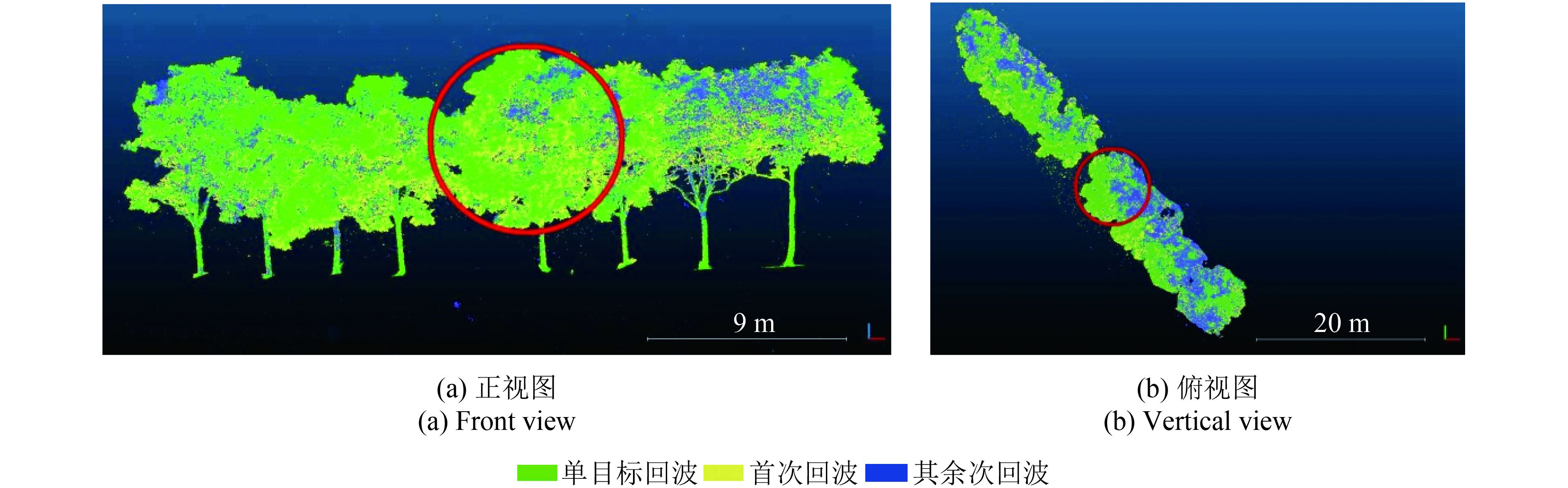
表 1 样地立木结构参数
Table 1 The structure parameters of the sample trees
| 平均值 | 最大值 | 最小值 | 方差 | |
| 胸径/cm | 8.91 | 11.8 | 6 | 1.76 |
| 树高/m | 5.887 | 8.5 | 3.9 | 1.17 |
| 冠幅/m | 3.395 | 4.537 | 2.27 | 0.377 |
试验提取了每株立木的三次回波数据(图3),对比分析了地面激光扫描仪全回波、首次回波和二次回波数据的提取精度,并设计算法分别提取LAI,为该类数据的应用做分析和说明。
2.2 分析方法
2.2.1 单株点云数据处理
首先利用获取的全波形点云数据,在RISCAN软件中分离地面和植被点云数据。由于植被的高程受地形影响,需要生成地面高程模型(DEM)用于地形校正。在ArcGIS中首先生成地面点云数据的矢量文件,然后转换成不规则三角网(TIN),最后由TIN转栅格生成DEM。此时生成扫描视场相对坐标系下的点云图。
分别提取8棵单株立木的点云数据,利用生成的地面DEM数据进行点云归一化处理。截取树干1.3 m以上的冠层点云(图4右边所示冠幅的全回波数据),将单株立木的冠层点云沿垂直方向投影到地面。由于每棵树的冠幅大小不同,所以对每棵单株树的投影做外接四边形,再根据这个外接四边形做其内接椭圆,该椭圆即为单株的冠幅大小。对扫描点云做分波处理,取得3类回波:单目标回波数据、首次回波数据和其余次回波数据,得到计算LAI的分回波初始点云(Yun 等,2016)。
2.2.2 基于3维点云数据的LAI算法
基于冠层孔隙率模型的解算LAI方法,通常假定叶片在空间的分布是随机的,不考虑叶片的集聚效应,测出的是单株整体有效叶面积指数。本文根据Beer lambert消光系数公式进行计算,所需要的输入参数较少,得到的估算结果也比较好(Martens 等,1993)。这一方法通过测定冠层上下辐射以及与消光系数相关的参数来计算叶面积指数。在点云数据中整体栅格投影面积与整体轮廓投影面积之比为整体有效叶面积指数LAI,如式(1)(Calders 等,2018)、式(2),而不是林隙内外辐射透过率的衰减。
| $\left\{ \begin{array}{l}GF({{\bar \theta }_i},Z) = 1 - {\rm{ }}\displaystyle\frac{{\displaystyle\sum {{w_j}({z_j} {\text{<}} Z,{{\overline \theta }_i})} }}{{N({{\overline \theta }_i})}}\\w = 1/n_{\rm{s}}\end{array} \right.$ | (1) |
式中,
| $e{\rm{LAI}}(Z) = - 1.1 \cdot \ln (GF({\bar \theta _h}, Z))$ | (2) |
计算单木冠幅有效LAI,使用55°—60°的天顶环来近似铰链区域
激光扫描技术本身就具有分辨率高、抗干扰能力强、主动快速等优点(Zheng 等,2013),在冠幅投影计算LAI的问题上,除了不同回波数据的数据分析,算法中还有投影所采用的分辨率的问题(杨文秀 等,2014)。投影利用降维有效提高算法实时性,投影所选取的分辨率大小影响投影点的密度,也是算法中的重要指标。本研究设计3种投影分辨率:0.01 m,0.02 m和0.03 m,表示投影后正方形像元的边长。
2.2.3 基于2维影像数据的LAI处理
DHP计算LAI是使用半球(鱼眼)镜头从下往上对冠层和天空拍照,然后对照片进行分析、计算结果。鱼眼照片永久记录了天空的可视和遮挡的几何结构,提供了冠层孔隙的位置、大小、密度和分布信息。利用鱼眼相机获取的单株无患子的半球摄影图片数据,先用Photoshop中的裁剪工具对植被进行裁减,将周围的噪音数据以及单木主干进行裁除(吴火森,2015),得到单株无患子的冠幅的图片数据。接着将单株无患子冠幅的图片数据导入Hemiview软件,由于每棵树的冠幅大小不同,所以需要确定每棵树的外接圆的半径。将Aligement范围设置成与相切于冠幅的圆(图5灰色同心圆环所示扇区),使单株半球摄影计算的冠幅范围和单株点云数据的冠幅范围相同。

用Hemiview中的计算工具得到数据集,再将其中的LAI数据表数据导入excel中,依照全天空照片(skymap)分区的面积大小为相应扇形区域的LAI增加权重pi,即
| ${p_i} = {{{S_i}}/S}$ | (3) |
式中,Si为第i个扇形区域面积大小,S总为总体圆面积大小。
| ${\rm{LAI}} = \sum\limits_{i = 1}^n {({\rm{LA}}{{\rm{I}}_i} \cdot {p_i})} $ | (4) |
式中,LAIi为第i个扇形区域的LAI,pi为每个扇形区域的面积权重,n为扇形区域总数。
根据式(4)进行加权求和,得到整个叶面积指数。
LAI2200,则是利用光通过树冠后的衰减量来计算其叶面积指数。该仪器过滤波长超过490 nm的波长,以保留一个蓝色的波段,其中植被和天空的对比最大。LAI是根据LI-COR手册的两项测量得出的:林木冠层下的辐射(B),并将其与邻近的空地中同时收集的全天光辐射(A)进行比较得到LAI(Calders 等,2018)。
最后将2维影像得到的叶面积指数,与点云数据计算的结果做相互验证,以分析验证所得3种回波数据(单目标回波、首次回波和其余次回波),以及点云投影计算时所用3种分辨率(0.01 m、0.02 m、0.03 m)对LAI计算的差异。
3 结果分析与验证
3.1 解算LAI的差异性
对样地中数据采集完整的8棵无患子,利用Beer lambert消光系数法分别提取3种投影分辨率下3种回波方式的LAI,如图6所示的各回波在不同分辨率下的冠幅投影。对这些数据进行可重复双因素分析,如表2所示。
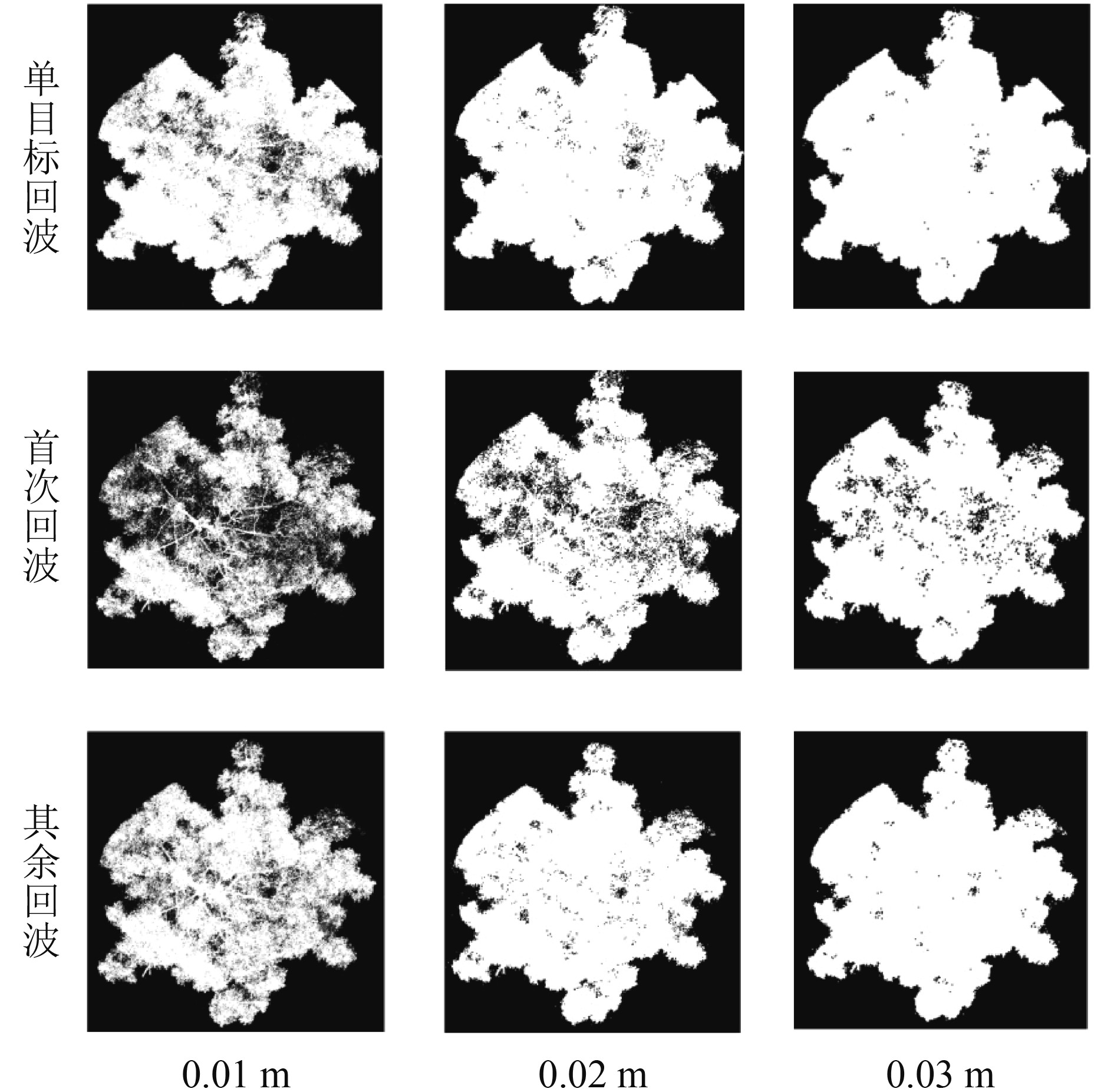
表 2 可重复双因素方差分析
Table 2 Result of reusable two factor analysis of variance
| 差异源 | SS | df | MS | F值 | P值 | Fα临界值 |
| 分辨率 | 19.660 | 2 | 9.830 | 59.039 | 3.60016E−15 | 3.142 |
| 回波 | 8.722 | 2 | 4.361 | 26.193 | 5.26458E−09 | 3.142 |
| 交互 | 0.075 | 4 | 0.018 | 0.112 | 0.977513806 | 2.517 |
| 内部 | 10.489 | 63 | 0.166 | — | — | — |
| 总计 | 38.946 | 71 | — | — | — | — |
| 注:SS为方差,df为自由度,MS为均方差。 | ||||||
如表2所示结果,投影分辨率与激光回波都对LAI有极显著影响(F>Fα)Fα为临界值。再将Beer lambert消光系数法得到的实验结果同2维影像(鱼眼DHP和LAI2200)所得叶面积指数反演结果做差异性分析。如表3所示,分辨率为0.01 m的投影数据计算得到的LAI值与鱼眼DHP所得结果均值和方差偏小,对LAI低估;而分辨率为0.02 m和0.03 m的估算结果与LAI2200所得结果相近,且差异不显著(F<Fα, P>0.05)。如表4所示结果,首次回波数据计算得到的LAI值与鱼眼DHP所得结果偏低且差异显著(F>Fα, P<0.05),首次回波与其余回波数据所得LAI与2维影像数据所得结果均差异显著,而单目标回波的估算结果与LAI2200结果差异不显著(F<Fα, P>0.05)。
表 3 不同投影分辨率下LAI差异性分析
Table 3 LAI variance analysis of different projection resolution
| 参数 | 0.01 m | 0.02 m | 0.03 m | LAI2200 | DHP | |
| 平均 | 1.489 | 2.474 | 2.689 | 2.563 | 1.814 | |
| 方差 | 0.205 | 0.396 | 0.238 | 0.223 | 0.115 | |
| 观测值 | 24 | 24 | 24 | 24 | 24 | |
| df | 23 | 23 | 23 | 23 | 23 | |
| LAI2200
检验结果 |
F | 0.924 | 1.785 | 1.075 | ||
| P(F≤Fα) 单尾 | 0.425 | 0.086 | 0.432 | |||
| F 单尾临界 | 0.496 | 2.014 | 2.014 | |||
| DHP
检验结果 |
F | 1.777 | 3.434 | 2.069 | ||
| P(F≤Fα) 单尾 | 0.088 | 0.002 | 0.044 | |||
| F 单尾临界 | 2.014 | 2.014 | 2.014 | |||
| 注:df为自由度。 | ||||||
表 4 不同回波LAI差异性分析
Table 4 LAI variance analysis of different return waveform
| 参数 | 单目标
回波 |
首次回波 | 其他回波 | LAI2200 | DHP | |
| 平均 | 2.363 | 1.737 | 2.551 | 2.562 | 1.814 | |
| 方差 | 0.362 | 0.501 | 0.450 | 0.221 | 0.115 | |
| 观测值 | 24 | 24 | 24 | 24 | 24 | |
| df | 23 | 23 | 23 | 23 | 23 | |
| LAI2200
检验结果 |
F | 1.634 | 2.262 | 2.032 | ||
| P(F≤Fα) 单尾 | 0.123 | 0.028 | 0.047 | |||
| F 单尾临界 | 2.014 | 2.014 | 2.014 | |||
| DHP
检验结果 |
F | 3.144 | 4.352 | 3.911 | ||
| P(F≤Fα) 单尾 | 0.004 | 0.000 | 0.001 | |||
| F 单尾临界 | 2.014 | 2.014 | 2.014 | |||
| 注:df为自由度。 | ||||||
由此,确定投影分辨率为0.02 m和0.03 m的单目标回波数据,可以用于LAI的解算,同LAI2200的2维影像数据结果进行相互验证。
3.2 验证数据
以同样的布站方式另外采集18棵无患子数据,在0.02 m和0.03 m分辨率下用Beer lambert消光系数法解算单目标回波的LAI数据,并和LAI2200测定的LAI数据进行截距为0的线性回归,结果如图7、图8所示。
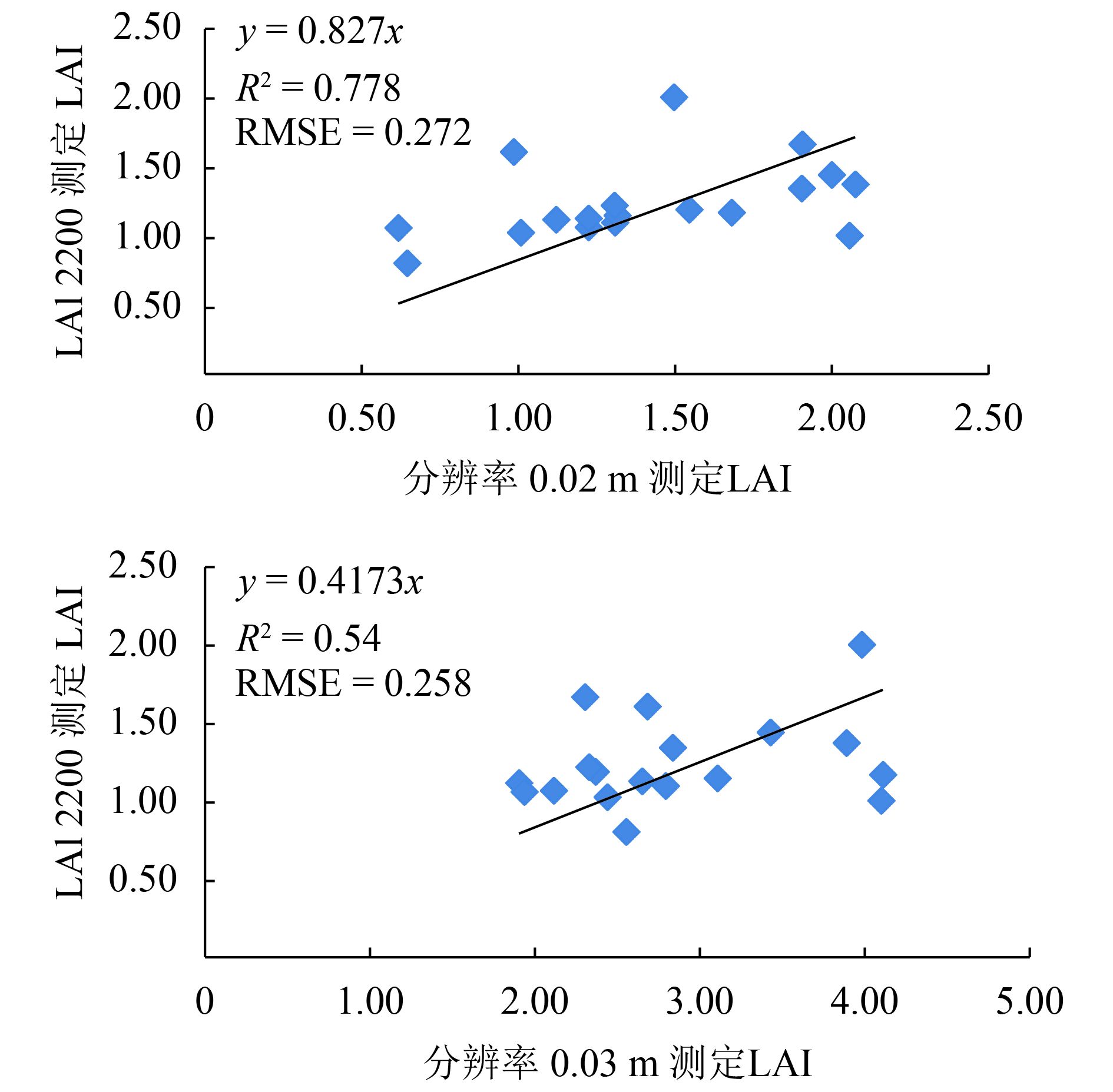
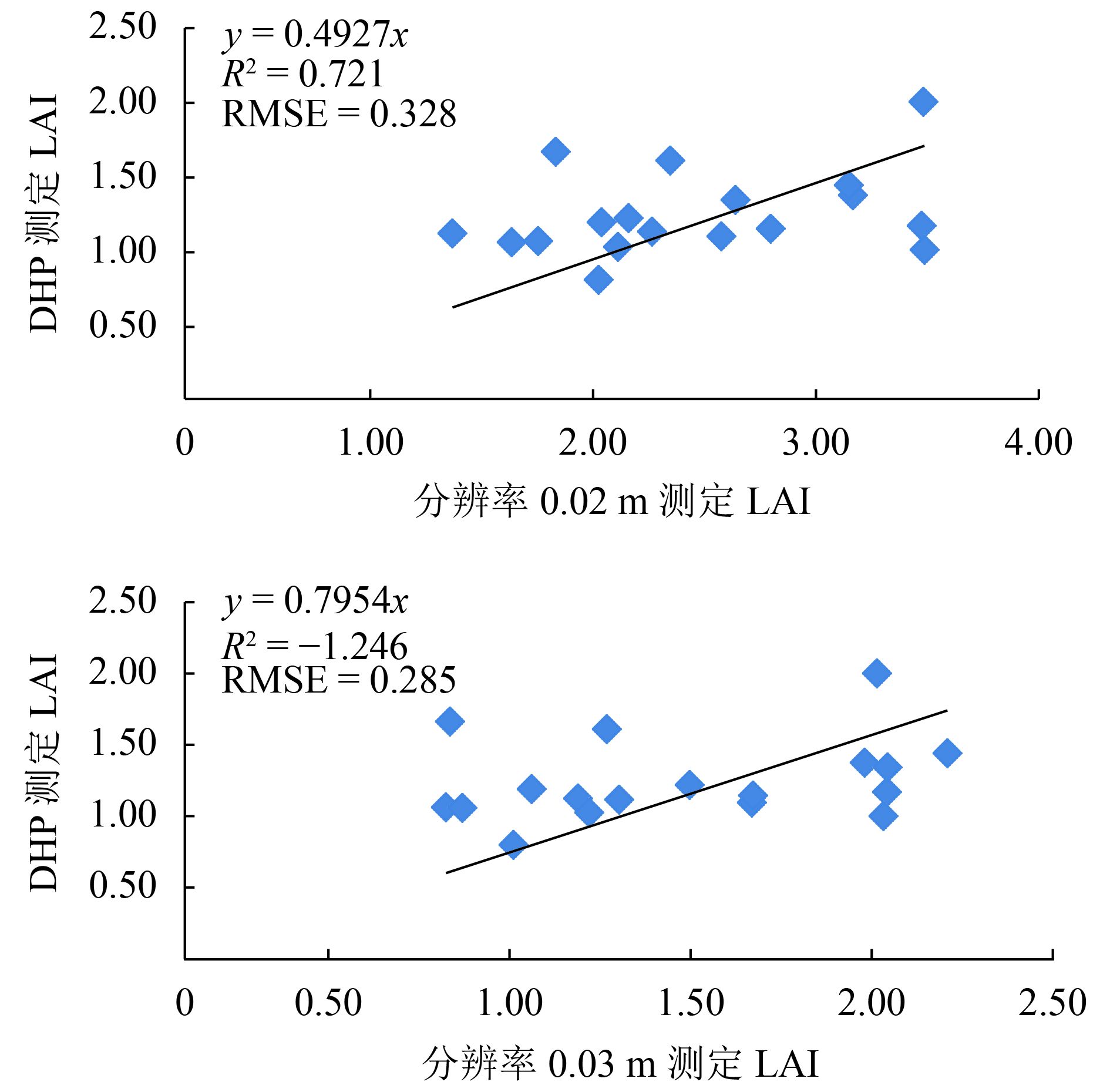
图7显示与LAI2200检验的结果,0.02 m分辨率下截距为0时斜率为0.827更接近于1,R2达到0.778是检验试验中的最大值。图8显示与DHP鱼眼摄影检验的结果,仍然是0.02 m分辨率较优。因此对于多回波地面激光扫描数据,使用Beer lambert消光系数法时使用投影分辨率为0.02 m的单目标回波图像可以求得与LAI2200更为接近的LAI。
4 讨 论
本研究比较了两类不同的LAI解算设备,并量化分析了其测量的效果,类似于文献(Calders 等,2018)的研究。所不同的是,本文采用地面激光多回波的扫描技术,利用Beer lambert消光系数法设计算法求得无患子单株立木有效LAI,在城市行道树测量工作中,这一技术有速度快、精度高,并可以借助城市建筑从高处扫描等优势,获取全方位的行道树点云数据。
2维影像测算LAI是利用光通过树冠后的衰减量来计算其叶面积指数。所以如果是直射光源、强光源透过树层时,叶片对太阳辐射的较为强烈的散射作用使得部分叶片像元混入到天空像元中,仪器就难以正常判读叶片像元和天空像元从而导致孔隙度以及叶面积指数的判读错误。而TLS的主动测量方式不受照明影响,产生更稳定的估计,这是大多数的研究都支持的结论(Zhao 等,2015;Ma 等,2016, 2017;邓洋波 等,2017;Calders 等,2018)。此外,除了LAI这一参数,采用叶面积密度(LAD)表征植被垂直方向上不同分层叶面积差异(王洪蜀 等,2016;尹高飞 等,2014),也是值得探索的,是本研究后续将继续补充的方面。
激光扫描技术需要从多角度对被测物进行多站扫描,有研究对站点设置精度控制等做了标定(Wilkes 等,2017),本文采用多站点扫描方式以保证获得全树冠信息,从而直观比较该类型设备的多回波点云数据特性,是可行且有效的方式。也有研究对该类设备的单站数据进行了分析,其LAI解算受到冠层树叶聚集度指数Ω和冠型大小等因子的影响(Li 等,2017),本文暂未做考虑。仅从各个回波的投影效果上看,单站点云数据不足以表达完整的信息,有必要设计更合适的实验方案完成多回波单站点数据的分析。
从50年代用泊松分布描述植物冠层消光技术的原理开始,Beer-Lambert定律就是LAI解算的常见形式(尹高飞 等,2014)。这一算法的基本原理是基于底视法则,由下向上测量,依据冠层辐射传输理论进行测定,可以作为植物定量遥感的地面定标手段。多回波的地面激光扫描仪数据算法基于对冠层孔隙率(gap fraction)分析得到叶面积指数,其基于假设是冠层内的各种元素(叶、枝、树干等)随机分布(Martens 等,1993)。因此主要影响Beer lambert消光系数法测得LAI精度的因子是冠层点云的投影方式和投影分辨率。本文使用的投影方法是垂直投影方式,将树冠的点云数据通过正射自上而下投影到地面(Ma 等,2017)。由于半球摄影使用的是半球投影方式,因此对地面激光点云数据也可以使用半球投影方式。需要先定义半球坐标系,将点云数据投影到半球表面上,然后将半球表面投影到地面上(Ma 等,2016)。这两种点云数据的投影方式计算的LAI存在一定差异,本文没有讨论。投影分辨率越高,LAI的精度越高,但当投影分辨率高于地基激光雷达分辨率时,则会由于点云密度过低导致冠层中出现细小空洞,反而降低了LAI的精度;投影分辨率越低,LAI值越大,且当投影分辨率过低时,会导致冠层周边出现明显斑块,降低了LAI的精度(Zheng 等,2013)。同时,从计算时效角度考虑,投影分辨率越高,计算LAI的时间也越长,因此选择合适的投影分辨率极为重要(图6)。本研究设计的LAI算法,经过检验分析,最佳投影分辨率应为0.02 m(图7)。
为解决TLS点云数据在枝干与叶片、叶片与叶片之间的遮挡问题,有研究采用分层投影反演LAI的方法(邓洋波 等,2017)。本文则采用了单目标回波、首次回拨和其他回波这3种回波类型。避免了随着冠幅高度的变化产生的不同层级的LAI差异。根据F检验,可以看出根据单目标回波得到的LAI数据准确度高于首次回拨和其他回波得到的LAI。这是因为,单目标回波表达了激光束第一次遇到的物体,这通常就是冠层最重要的叶片;而首次回波则多数产生在物体边缘,可以通过这个数据描述干型或者叶片形状,但轮廓内的数据是缺失的,不适合用于LAI的解算;其余次回波则有很多冗余数据点云(图3)。这是多回波地面激光雷达扫描技术在未来值得进一步分析的各种数据形式。拓展了地面激光扫描的应用领域,为行道树生长量信息准确提取和城市树木精确建模提供了重要的技术参考。同时,这种方法扫描得到的点云数据可以清楚地观测到机载激光雷达扫描方式(ALS)由于林冠遮挡而获取不了的数据,如林冠下树木的主干和被林冠遮盖的地面,可以方便测量树木胸径等结构参数。多回波数据结合ALS的上层冠幅数据,在数据融合等未来应用上有更广阔的前景(曹林 等,2013)。

5 结 论
本研究采用地面激光多回波的扫描技术,利用Beer lambert消光系数法设计算法求得无患子单株立木LAI,并利用2维影像计算LAI与其进行对比。结果表明分辨率与回波都对LAI有极显著影响,将Beer lambert消光系数法得到的实验结果同2维影像(鱼眼DHP和LAI2200)所得叶面积指数结果做差异性分析,分辨率为0.01 m的投影数据计算得到的LAI值与鱼眼DHP所得结果均值和方差偏小,对LAI低估;而投影分辨率为0.02 m和0.03 m的估算结果与LAI2200所得结果相近,且差异不显;首次回波数据计算得到的LAI值与鱼眼DHP所得结果偏低且差异显著,其余回波数据所得LAI与2维影像数据所得结果均差异显著。分析结果是投影分辨率为0.02 m和0.03 m的单目标回波数据,可以用于LAI的解算,同LAI2200的2维影像数据结果进行相互验证。在0.02 m和0.03 m分辨率下用Beer lambert消光系数法解算单目标回波的LAI数据,并和LAI2200测定的LAI数据进行截距为0的线性回归,结果0.02 m分辨率得到的估算结果斜率为0.827更接近于1。因此对于多回波地面激光扫描数据,使用Beer lambert消光系数法时使用投影分辨率为0.02 m的首次回波图像可以求得较为精确的LAI。本研究所做多回波地面激光数据计算叶面积指数的算法拓展了地面激光扫描的应用领域,为立木生长量信息准确提取和树木精确建模提供了重要的技术参考。
参考文献(References)
-
Calders K, Origo N, Disney M, Nightingale J, Woodgate W, Armston J and Lewis P. 2018. Variability and bias in active and passive ground-based measurements of effective plant, wood and leaf area index. Agricultural and Forest Meteorology, 252 : 231–240. [DOI: 10.1016/j.agrformet.2018.01.029]
-
Cao L, She G H, Dai J S and Xu J X. 2013. Status and prospects of the LiDAR-based forest biomass estimation. Journal of Nanjing Forestry University (Natural Sciences Edition), 37 (3): 163–169. [DOI: 10.3969/j.issn.1000-2006.2013.03.029] ( 曹林, 佘光辉, 代劲松, 徐建新. 2013. 激光雷达技术估测森林生物量的研究现状及展望. 南京林业大学学报(自然科学版), 37 (3): 163–169. [DOI: 10.3969/j.issn.1000-2006.2013.03.029] )
-
Chen J M and Black T A. 1992. Defining leaf area index for non-flat leaves. Plant, Cell and Environment, 15 (4): 421–429. [DOI: 10.1111/j.1365-3040.1992.tb00992.x]
-
Deng Y B, Liu J, Yu K Y, Chen Z H, Yu X Y and Lin T Z. 2017. Individual tree Lai inversion technique based on stratification theory and 3D laser scanning. Journal of Southwest Forestry University, 37 (6): 148–155. [DOI: 10.11929/j.issn.2095-1914.2017.06.024] ( 邓洋波, 刘健, 余坤勇, 陈樟昊, 俞欣妍, 林同舟. 2017. 基于分层理论与三维激光扫描的单木叶面积指数反演技术研究. 西南林业大学学报, 37 (6): 148–155. [DOI: 10.11929/j.issn.2095-1914.2017.06.024] )
-
Li Y M, Guo Q H, Su Y J, Tao S L, Zhao K G and Xu G C. 2017. Retrieving the gap fraction, element clumping index, and leaf area index of individual trees using single-scan data from a terrestrial laser scanner. ISPRS Journal of Photogrammetry and Remote Sensing, 130 : 308–316. [DOI: 10.1016/j.isprsjprs.2017.06.006]
-
Liu Y, Liu R G, Chen J M, Cheng X and Zheng G. 2013. Current status and perspectives of leaf area index retrieval from optical remote sensing data. Journal of Geo-information science, 15 (5): 734–743. [DOI: 10.3724/SP.J.1047.2013.00734] ( 刘洋, 刘荣高, 陈镜明, 程晓, 郑光. 2013. 叶面积指数遥感反演研究进展与展望. 地球信息科学学报, 15 (5): 734–743. [DOI: 10.3724/SP.J.1047.2013.00734] )
-
Ma L X, Zheng G, Eitel J U H, Moskal L M, He W and Huang H B. 2016. Improved salient feature-based approach for automatically separating photosynthetic and nonphotosynthetic components within terrestrial lidar point cloud data of forest canopies. IEEE Transactions on Geoscience and Remote Sensing, 54 (2): 679–696. [DOI: 10.1109/TGRS.2015.2459716]
-
Ma L X, Zheng G, Eitel J U H, Magney T S and Moskal L M. 2017. Retrieving forest canopy extinction coefficient from terrestrial and airborne lidar. Agricultural and Forest Meteorology, 236 : 1–21. [DOI: 10.1016/j.agrformet.2017.01.004]
-
Ma Z Q, Liu Q J, Zeng H Q, Li X R, Chen Y R, Lin Y M, Zhang S H, Yang F T and Wang H Q. 2008. Estimation of leaf area index of planted forests in subtropical China by Photogrammetry. Acta Ecologica Sinica, 28 (5): 1971–1980. [DOI: 10.3321/j.issn:1000-0933.2008.05.011] ( 马泽清, 刘琪璟, 曾慧卿, 李轩然, 陈永瑞, 林耀明, 张时煌, 杨风亭, 汪宏清. 2008. 南方人工林叶面积指数的摄影测量. 生态学报, 28 (5): 1971–1980. [DOI: 10.3321/j.issn:1000-0933.2008.05.011] )
-
Martens S N, Ustin S L and Rousseau R A. 1993. Estimation of tree canopy leaf area index by gap fraction analysis. Forest Ecology and Management, 61 (1/2): 91–108. [DOI: 10.1016/0378-1127(93)90192-P]
-
Pirotti F, Guarnieri A and Vettore A. 2013. Vegetation filtering of waveform terrestrial laser scanner data for DTM production. Applied Geomatics, 5(4): 311–322 [DOI:10.1007/s12518-013-0119-3]
-
Wang H S, Li S H, Guo J W and Liang Z Q. 2016. Retrieval of the leaf area density of Magnolia woody canopy with terrestrial Laser-scanning data. Journal of Remote Sensing, 20 (4): 570–578. [DOI: 10.11834/jrs.20165061] ( 王洪蜀, 李世华, 郭加伟, 梁祖琴. 2016. 地基激光雷达的玉兰林冠层叶面积密度反演. 遥感学报, 20 (4): 570–578. [DOI: 10.11834/jrs.20165061] )
-
Wilkes P, Lau A, Disney M, Calders K, Burt A, de Tanago J G, Bartholomeus H, Brede B and Herold M. 2017. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sensing of Environment, 196 : 140–153. [DOI: 10.1016/j.rse.2017.04.030]
-
Wu H S. 2015. Research and implementation of fisheye camera image processing. Xi’an: Xidian University (吴火森. 2015. 鱼眼相机图像处理及校正算法研究与实现. 西安: 西安电子科技大学)
-
Xing Y Q, Yao S T, You H T, Tian X, Peng T, Li M Y, Xie J and Yan C. 2018. A inversion on birch forest LAI based on airborne LiDAR full waveform data. Journal of Northwest Forestry University, 33 (1): 11–18. [DOI: 10.3969/j.issn.1001-7461.2018.01.02] ( 邢艳秋, 姚松涛, 尤号田, 田昕, 彭涛, 李梦颖, 谢杰, 闫灿. 2018. 基于机载LiDAR全波形数据白桦林林分LAI反演研究. 西北林学院学报, 33 (1): 11–18. [DOI: 10.3969/j.issn.1001-7461.2018.01.02] )
-
Yang W X, Fu W X, Zhou Z W, Yu W and Ma J. 2014. Fast three dimensional LIDAR target recognition based on projection dimension reduction. Infrared and Laser Engineering, 43 (S1): 1–7. [DOI: 10.3969/j.issn.1007-2276.2014.z1.001] ( 杨文秀, 付文兴, 周志伟, 余巍, 马杰. 2014. 基于投影降维的激光雷达快速目标识别. 红外与激光工程, 43 (S1): 1–7. [DOI: 10.3969/j.issn.1007-2276.2014.z1.001] )
-
Yin G F, Liu Q H, Li J, Zeng Y L and Xu B D. 2014. Effect of crown shape on the estimation of gap probability and leaf area index. Journal of Remote Sensing, 18 (4): 752–759. [DOI: 10.11834/jrs.20143205] ( 尹高飞, 柳钦火, 李静, 曾也鲁, 徐保东. 2014. 树冠形状对孔隙率及叶面积指数估算的影响分析. 遥感学报, 18 (4): 752–759. [DOI: 10.11834/jrs.20143205] )
-
Yun T, An F, Li W Z, Sun Y, Cao L and Xue L F. 2016. A novel approach for retrieving tree leaf area from ground-based LiDAR. Remote Sensing, 8 (11): 942 [DOI: 10.3390/rs8110942]
-
Zhao K G, García M, Liu S, Guo Q H, Chen G, Zhang X S, Zhou Y Y and Meng X L. 2015. Terrestrial lidar remote sensing of forests: Maximum likelihood estimates of canopy profile, leaf area index, and leaf angle distribution. Agricultural and Forest Meteorology, 209-210 : 100–113. [DOI: 10.1016/j.agrformet.2015.03.008]
-
Zheng G, Moskal L M and Kim S H. 2013. Retrieval of effective leaf area index in heterogeneous forests with terrestrial laser scanning. IEEE Transactions on Geoscience and Remote Sensing, 51 (2): 777–786. [DOI: 10.1109/TGRS.2012.2205003]
-
Zou J and Yan G J. 2010. Optical methods for in situ measuring leaf area index of forest canopy: a review. Chinese Journal of Applied Ecology, 21 (11): 2971–2979. ( 邹杰, 阎广建. 2010. 森林冠层地面叶面积指数光学测量方法研究进展. 应用生态学报, 21 (11): 2971–2979. )


