
|
收稿日期: 2017-11-16
基金项目: 国家自然科学基金(编号:41271423);国家高技术研究发展计划(863 计划) (编号:2009AA122003)
第一作者简介: 李大冲,1989年生,男,硕士研究生,研究方向为湿地遥感分类。E-mail:lidc@radi.ac.cn
通信作者简介: 牛振国,1972年生,男,研究员,研究方向为湿地遥感。E-mail:niuzg@radi.ac.cn
中图分类号: TP751.1
文献标识码: A
|
摘要
湿地专题图的更新无论是对湿地研究还是湿地管理和保护都具有重要价值。但是由于湿地本身具有显著的时空动态性和空间异质性特征,使得大空间范围湿地专题图的更新面临着周期长、时效性差的挑战。为应对这一挑战,实现大空间范围湿地地图的快速更新,本文提出一种通过提取历史湿地专题图中的信息,对新遥感影像进行自动化的湿地分类制图方法——“迭代解译再组织” IIR (Iterative Interpretation and Reorganization)。针对湿地空间异质性强、稳定样本获取困难等特点,IIR方法通过分别获取不同湿地类型的空间信息和类别属性两个步骤完成湿地的自动更新。为验证该方法在大空间范围湿地图更新中的应用效果,随机选取了位于高海拔地区、高纬度地区、低纬度地区和滨海地区等不同自然地理环境的4个湿地保护区(若尔盖湿地保护区、莫莫格湿地保护区、鄱阳湖湿地保护区和黄河三角洲湿地保护区)进行验证。结果表明IIR方法的湿地制图的总体精度在70%—90%,总体上优于传统监督分类方法。IIR方法对于大的时空尺度背景下湿地专题图更新面临的高时空动态特征具有较好的解决能力。
关键词
自动更新, 湿地, 专题图, 大空间范围
Abstract
Timely updating of wetland map is vital to wetland research and management. However, the highly hydro-dynamic characteristics and great spatial heterogeneity of wetlands pose challenges in updating large-scale wetland thematic maps in a timely manner. General mapping methods, such as supervised or object-oriented classification, are time consuming and can be easily affected by cognitive differences. To address this issue, we propose an automatic updating method of wetland map, namely, iterative interview and reorganization. We aim to design a method that can transfer the knowledge from existing wetland thematic maps into the classification of a new remote sensing image. At the same time, the method should be robust for different geographical conditions. Rather than adapting samples between different domains, Iterative Interview and reorganization (IIR) tries to obtain the precise spatial distribution of ground objects first and then defines the properties of the spatial distributions by matching their spatial features. The method can tackle complex situations caused by changes of ground objects. This automatic method achieves an overall accuracy ranging from 70% to 90%, similar to the results of general supervised classification. In some cases, IIR has better performance in the identification of detailed information than that the support vector machine or maximum likelihood classification, such as for boundaries of ground objects and slender targets. To examine the performance of this method, we choose four wetland reserves with various geographical environments across China, including the Momoge Nature Reserve in high latitude, the Zoige Reserve in high altitude, Poyang Lake in a hot-humid area, and Yellow River Delta along a coastal area. Both overall and individual accuracies of various wetland classes in the four study areas are higher than those of the general supervised classification. Furthermore, IIR can automatically detect new classes such as paddy field. Without extra samples, IIR achieves better classification in four study areas of different landscapes. This method is not only adaptable for eliminating unfavorable factors, such as terrain or clouds, but also more flexible and robust when dealing with different wetlands and phenological changes, demonstrating that the IIR method can be applied in large-scale thematic map updating. IIR can have a consistent interpretation of the same wetland class because all procedures are carried out without expert knowledge. In conclusion, IIR can meet the needs of automatic updating of large-scale wetland thematic maps.
Key words
automatic updating, wetland, thematic map, large scale
1 引 言
湿地是自然界生物多样性最丰富、生产力最高的生态系统之一。但是自20世纪以来全球湿地丧失形势严峻(Davidson,2014;Hu 等,2017;牛振国 等,2012)。快速生成湿地专题地图和更新已有湿地专题地图对于满足湿地生态系统研究、湿地资源保护和合理利用等具有十分重要的理论和现实意义。目前湿地遥感专题图的生成和更新在中小尺度上多采用人工目视解译和传统的计算机分类法(宫兆宁 等,2011;王宗明 等,2004;张海英 等,2009)。由于空间尺度小、湿地类型简单,因而利用该方法时工作量较小,基本可以满足小尺度专题图的更新需求。然而一方面季节性湿地具有明显的时空动态变化范围(Bernadez 等,1993;Carter,1986);另一方面,在以大空间范围专题图更新为目标时,不同自然地理环境也会带来湿地特征和类型的区域差异(傅伯杰 等,1999;吴绍洪 等,2003)。因此,传统方法远远无法满足大空间范围、高时间频率的湿地专题图更新的需求,这也是大空间范围湿地专题图更新面临的主要难点之一。
目前已经有很多土地覆盖/利用专题图的快速自动更新方法(Armenakis,2003;Hoffmann 等,2000;Jung,2004;Knudsen和Olsen,2003;Niederöst,2001;Walter,2004)。这些方法可归纳为基于变化检测的更新方法和信息迁移的方法两大类。
基于变化检测(Hong和Vatsavai,2016;Leichtle 等,2017;Zhang 等,2017)的更新方法仅分析多个时期遥感影像中变化的幅度和方向。变化检测方法通常要求图像经过严格的辐射处理以保证光谱信息之间具有可比性。还有基于专题图的变化检测分析(Janez 等,2000;Leduc 等,2001)。比如Leduc等人(2001)对影像和专题图分析得到变化部分,然后根据旧专题图信息对变化部分进行解译。然而,变化检测分析往往应用于简单场景,Hussain等人(2013)认为基于变化检测的方法受限于复杂的关系和多样的属性的处理。
与变化检测相比,信息迁移的方法具有在复杂环境下的应用前景。已有的专题地图往往包含了丰富的专家知识,将信息迁移到新的影像能获得比变化检测更可靠丰富的信息。如Grinand等人(2008)使用这种方法在实验室基本完成土壤制图。Wright和Gallant (2007)对比影像与专题图相同的区域,并采集影像中对应位置的信息作为样本,对湿地监督分类。这种方式简化了采样过程,降低了专题图制作的成本,但采集样本的过程仍需要人工的参与。另外一种更为高效的样本迁移方法是通过调整样本以适应新数据集的特征,从而将样本迁移到新影像中去(Bruzzone和Cossu,2002;Bruzzone 等,2002;Bruzzone和Prieto, 2001, 2002)。Bruzzone等人(2006)提出了最大化区分样本间差异的方法,使迁移后的样本对目标影像特征更具有代表性,同时简化了参数,使得这一迁移过程更灵活高效。Demir等人(2013)通过增加人工判读来解决迁移后的样本从数量或质量等方面对新的类别存在的代表性不足问题。另外Chen等人(2012)提出“域转换”的方法,在变化检测的基础上获取新影像的样本,但同样存在新增地物导致的样本缺失问题。Pásztor等人(2018)使用丰富的资料得到较为完整的幅土壤专题图,但仍存在类别难以统一的情况。此外,还有完全基于相同先验知识或特征对多时相影像分类的方法(Black 等,2016;Nauman和Thompson,2014;Rathore 等,2016)。
上述方法的共同之处是需要优先获取准确的代表性样本信息,再用此信息对目标影像进行分类。这种方法不仅需要选取的样本具有类别属性信息,还需要有足以表征准确类别边界线的信息。对于类型更为复杂多变的湿地生态系统来说,这些方法还无法满足大空间范围、高时间频率的更新需求。
为此,本文提出一种基于已有的全国湿地专题图和遥感影像的自身结构特征,以大空间范围湿地图自动更新为目标,针对湿地高时空动态性特征的自动更新方法;并以全国不同区域和类型的湿地为例进行了验证。
2 研究区和数据源
2.1 研究区
考虑到全国自然环境条件多样,选取了代表不同自然地理特征的湿地保护区作为研究区域(图1)。其中,莫莫格湿地保护区地处东北平原,地势较为平缓,湿地发育广泛,湿地受到显著人类经济活动影响。四川若尔盖湿地保护区地处青藏高原,平均海拔高,部分山体常年有积雪,冰雪在每年的七八月份融化给湿地补充水源。若尔盖是黄河和长江的源头,具有典型的高山湿地特征。江西鄱阳湖保护区植被茂盛,降水充沛,地处长江下游平原,沼泽广布。山东黄河三角洲保护区地处华北平原,有滨海湿地和内陆湿地共同分布,多光滩,人类活动痕迹较为明显。


2.2 数据源
本文研究包括3部分数据源:矢量格式的历史湿地专题图(2008年) (牛振国 等,2012)、栅格格式的Landsat 8 OLI遥感影像(2015年前后)和数字高程模型DEM(Digital Elevation Model)。其中,2008年湿地专题图以1400余景中巴资源卫星影像(CBERS-02B)为基础,采用人工为主的半自动方法解译完成(牛振国 等,2012)。其湿地分类体系与《湿地公约》和中国湿地调查的分类体系基本一致,分为3个一级类,15个二级湿地亚类(宫兆宁等,2011)。该湿地专题图的优点是对各类湿地类型的判别准确,但缺点是在专题图的判读过程中,基于专家知识进行了一定程度的概括(例如沼泽图斑中会包括面积较小(小于1 Ha)的明水水面或洪泛地;而水体中较小斑块的沼泽/泥滩地会概括为水体,不再单独标出)。这种历史专题图上图斑的概括对自动更新方法也会带来巨大的挑战。由于Landsat系列遥感数据的一致性,因此本文考虑将原有湿地专题图以最新的Landsat 8 OLI为基础进行更新。
通过Landsat 8 OLI中的质量评价波段BQA(Pre-Collection QA band),可以获取每景影像的云层分布(https://landsat.usgs.gov/qualityband[2017-06])。所用到的Landsat遥感影像的时间如表1所示。DEM为SRTM 90 m产品,用于若尔盖地区的地形分析。
表 1 数据源
Table 1 Information of source data
| 类型 | 行列号 | 时间 | 地点或范围 |
| 栅格 | 119/028 | 2015-05-22 | 莫莫格保护区 |
| 131/037 | 2016-07-15 | 若尔盖保护区 | |
| 121/040 | 2015-09-09 | 鄱阳湖保护区 | |
| 121/034 | 2015-05-20 | 黄河三角洲保护区 | |
| SRTM_57_06 | SRTM 90 m DEM version 4 | 若尔盖保护区 | |
| 矢量 | 全国湿地专题图 | 2008 | 全国 |
3 方 法
3.1 数据预处理
相比于原始的反射率数据,不同的遥感指数可以压缩数据量、压抑噪声、突出感兴趣的信息。如各种水体指数(表2)可以反映不同水体的状态;而不同植被指数可以反映植被的不同状态(表2)。Landsat遥感影像经过计算得到表观反射率数据,然后使用ENVI的FLAASH大气校正模块处理,将得到的多光谱数据集计算得到需要的各类水体指数和植被指数(表2)。
表 2 水体指数和植被指数计算公式
Table 2 Algorithm for water/plant indexes
| 指数 | 方程式 | 作者和年代 | |
| 1 | NDWI |
|
(McFeeters,1996) |
| 2 | MNDWI |
|
(Tebbs 等,2013) |
| 3 | EWI |
|
(闫霈 等,2007) |
| 4 | NDVI |
|
(Rouse 等,1974) |
| 5 | NWI |
|
(刘桂林 等,2013) (C is constant, in this study, the C=1) |
| 6 | S3 |
|
(Saito and Yamazaki, 1999) |
| 注:NDWI: Normalized Difference Water Index; MNDWI: Modified Normalized Difference Water Index; EWI: Enhanced Water Index; NDVI: Normalized Difference Vegetation Index; NWI: New Water Index; S3: Snow Cover Indices。 | |||
此外,山体和云层等的阴影与其水体和沼泽较易混淆,而对于自动化方法而言,海水会影响内陆水体变化情况的判断。进行大空间范围湿地专题图的自动更新时,需要对这些不同情况进行判别,以达到自动化处理的需求。为此本文构建了相应的判别条件,用以自动构建输入数据集。在不存在上述情况下湿地图的更新采用NWI、NDWI、MNDWI、EWI、NDVI指数的组合;而对于存在上述限制因素的区域,根据表3所示的判别条件和方法自动构建数据集。此外本文将坡度作为分类后处理的辅助数据,用以对分类后的结果做进一步处理。
表 3 自动构建输入数据的判别条件及方法
Table 3 Judgment method for adaptation of input dataset
| 参数 | 来源 | 判别条件 | 用处 |
| 积雪指数 | s3指数 | DEM是否为积雪海拔 | 输入参数 |
| 云层掩膜 | BQA(阈值为215,进行二值化处理)1 | 云层面积与分布 | 输入参数 |
| 海水掩膜 | 历史分类图矢量栅格化 | t1时类别无覆盖 && 影像为海水 | 输入参数 |
| 坡度掩膜 | Slope(阈值为10°,进行二值化处理) | 大坡度面积与分布 | 分类后处理 |
| 注:1. https://landsat.usgs.gov/qualityband [2017−07]。 | |||
3.2 湿地专题图更新方法
除了样本能够直观地代表地物的属性和空间分布,数据本身的结构特征也包含精确有效的信息。Aydav和Minz (2015)在Gan等人(2013)及Rosenberg等人(2005))基础上提出基于聚类的半监督学习方法,逐步扩展标注数据集。他借助了数据自身的数据结构来帮助识别分类,并证明了比单纯使用样本更有效。
本文中定义2008年湿地专题图的时相为t1,待分类影像的时间(2015年)为t2。从t1到t2,同一区域的湿地变化,存在几种不同的变化类型:不变、扩展、萎缩。与此同时地物属性发生变化,产生新增湿地、湿地类型内部转变或者转变为非湿地。这样需要从原有专题图有区别地获取空间位置和属性信息,以及建立两个时期地物之间的关联。由此提出“迭代解译再组织” IIR (Iterative interpretation and Reorganization)方法。方法的实现分为两步:一是获取t2时期的湿地类别空间分布——采用了多次解译的方式确定影像中不同湿地类别的空间分布;二是对这些湿地类别赋予正确的属性。该过程可以下公式表示:
| ${M_{t2}} = G\left({F\left({{M_{t1}}, {I_{t2}}} \right)} \right)$ | (1) |
式中,
3.3 确定湿地的空间分布
一方面,由于湿地处于过渡地理位置的特征使得湿地的光谱特征在空间上会发生快速的变化,也就是同属于一类湿地类型,其光谱特征会有较大的变化幅度;另一方面,湿地专题图的生成包含了高度的综合判读过程。该过程会造成同一个湿地图斑包含了几种不同的相似地物类型(如湖泊湿地的图斑会同时包含开放的明水面和部分水生植被覆盖的部分)。湿地本身的空间异质性特征和专题图的概括特征使得依靠历史专题图进行样本获取和迁移的方法,难以获得典型的样本。但湿地的空间分布特征相比光谱特征更稳定,因此考虑首先获取湿地的空间分布特征。本文中获取影像中感兴趣的空间信息抽象表示为
对于未知特征空间的输入数据,非监督分类(如ISODATA: Iterative Self organizing Data Analysis)表现出较好的优势,可以有效的识别差异性特征并做出区分。但非监督分类方法会存在对感兴趣类别区分不够(如湿地类别内的亚类的区分不够)和不感兴趣类别区分过度的问题(非湿地类别区分过细)的缺点。利用已有湿地专题图所包含的空间信息,通过迭代和训练获取新影像中湿地的精细空间分布;并利用基于“蒙特卡洛思想”的空间分布概率等方法,进一步提高不同地物类别边界线的准确性。据此,该过程分为以下两个步骤完成(图2和图3)。

(1)倾向性分类。此步骤是利用非监督分类的聚类优点,并结合已有湿地专题图的空间分布,对湿地类别进行针对性地聚类。
首先,以历史专题图中湿地相关类别的空间分布范围作为感兴趣区ROI(Region of Interest),以获得感兴趣区所包含的亚类。ROI的空间范围记作A1={a1, a2,
然后统计所得亚类样本的均值作为分类的参数(称为分类核),使用监督分类的方法SAM(Spectral Angle Mapping)得到这些分类核所对应的空间分布范围,以充分利用数据集自身分布特征。
为得到湿地精细分类,采用迭代的分析方法:对监督分类结果C1中每一个类别的空间范围ci和历史分类图的类别进行重叠分析,并将空间重叠比例满足某一阈值(>10%ci)的数目作为下一次自组织聚类时该类别将要分裂的数目,当前空间分布范围ci作为ROI,二者组成下一次迭代的参数。
为保证该过程的收敛,通过式(2)约束
| $k = \displaystyle\sum\limits_{i = 0}^N { \displaystyle\sum\limits_{j = 0}^M {\frac{{S_{ij}^2}}{{{S_i}\cdot {S_j}}}} } $ | (2) |
式中,N为历史分类图中的类别数,为固定值,L为聚类过程所得到的聚类数目,
通过上述过程,最终确定不同湿地类别的空间分布结果。但由于湿地类别的相似性特征,使得类别的边界在空间上的表现为随机分布。需要将随机分布的空间位置转变为确定的、可靠的空间分布图。
(2)湿地类别空间分布确定。蒙特卡洛方法是冯·诺依曼提出的一种方法,可以充分利用计算机的计算能力,达到精确的数学推演公式的效果。蒙特卡洛在特征空间中随机搜索,而不是全部搜索,又可以达到和穷举法相似的效果而花费很低。
根据蒙特卡洛方法,当样本在某一点的出现次数增加时,可以根据出现频率确定该点所对应的目标地物的概率,从而将随机出现的频率转化为类别从属的概率,最终通过这种方式确定各个类别的空间分布(图3)。
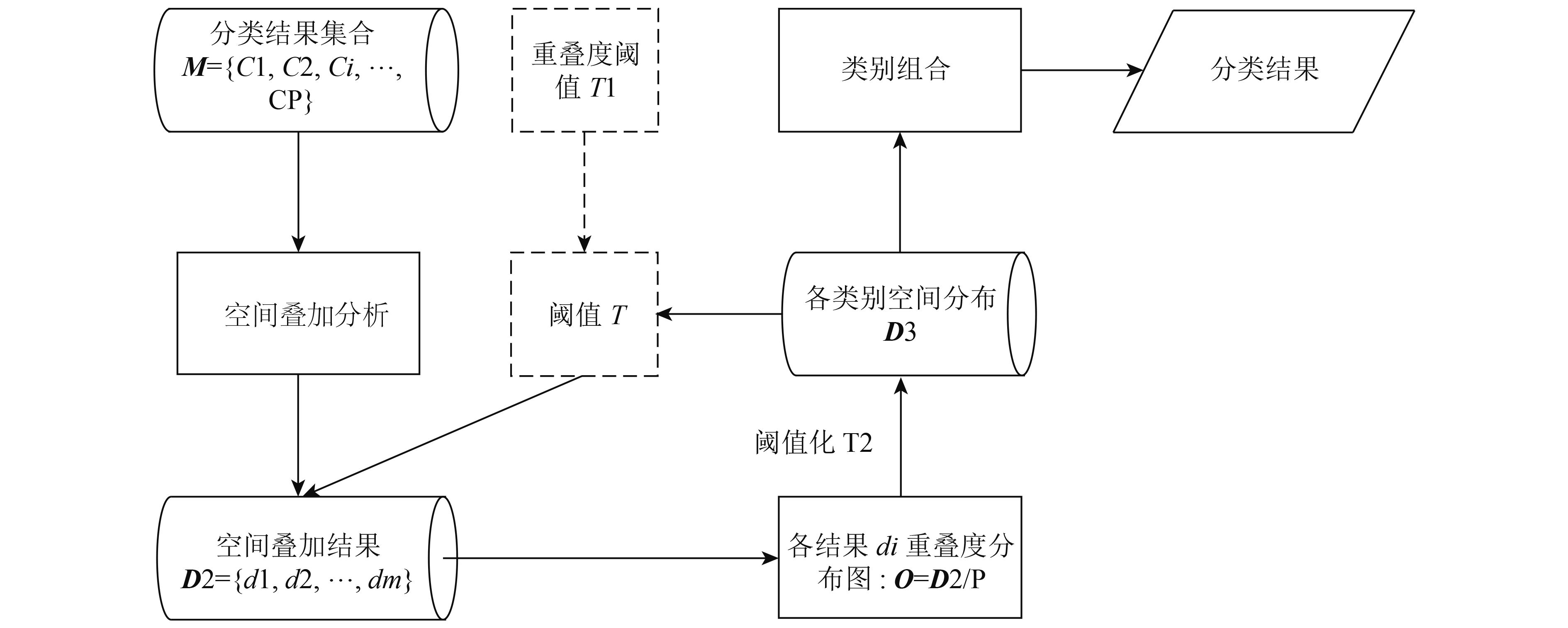
在实际分类中,首先选择预先设定的阈值,记作T1(设定为0.2),构建各层间亚类的连接关系图,用于得到亚类簇;然后选择表示亚类集合中像元的一般归属度的阈值,记作T2,和重叠度图O计算各类簇的空间分布范围D3;将第一次得到的D3取代先验阈值T1——任何一层中包含的亚类和此次所得D3满足一定的重叠面积比率(设定阈值为40%),得到新的亚类簇,使用同样的方法得到新的D3。因为和同一地物高度相关,两种阈值得到的亚类集合的重叠度一般都比较高,所以对阈值不太敏感,设定T2为适中的阈值0.5。这里使用双阈值设置,可利用粗糙数据(首次得到的D3)替换先验设定,进一步提高类别空间位置的精度。
通过这种频率转化为实际空间分布的概率,可以得到较为准确的空间分布,完成将历史湿地专题图
3.4 湿地分类图属性的赋值
大空间范围湿地图的更新以原始遥感影像为基本单元进行,因此分类后的图斑的属性赋值也首先基于影像的分幅开展。本文以Landsat图幅为基本单元(185 km×185 km)。
由于新时期的遥感影像和历史专题分类图之间部分类别存在变化,难以使用重叠度、位置、形状等评判标准得到鲁棒性的结果。空间自相关源自于Tobler的地学第一定律,并得到广泛应用(陈江平 等,2011;谢花林 等,2006)。文章提出以空间自相关的要素匹配度的方法(Moran’s I指数)来建立新旧分类图之间的关联。
| $I = \displaystyle\frac{{\left({\displaystyle\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{W_{ij}}\left({{x_i} - \overline x } \right)\left({{x_j} - \overline x } \right)} } } \right)}}{{\left({\displaystyle\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{W_{ij}}\cdot \displaystyle\frac{1}{n}\cdot \sum\limits_{k = 1}^n {{{\left({{x_k} - \overline x } \right)}^2}} } } } \right)}}$ | (3) |
具体的,每一个t1时的类别和t2影像所得到的次一级别的类别(亚类)作为单独的波段组合成新多波段数据,
3.5 算法复杂度
本文提出的IIR算法在逻辑上主要分为类别空间范围的获取和类别属性的确定两部分;而在算法的实现上分为倾向性解译、组合所得亚类以及属性的确定3部分。其中后两部分均使用矩阵进行运算,花费的时间与图像大小、类别数目等参数无关,时间复杂度为O (1)。而倾向性解译的时间复杂度涉及到多个变量。
假设算法从初始运行到收敛,需要P次迭代,每次迭代产生的亚类数目为
在实际运行中,可通过减少ISODATA运行次数来大幅降低总的运行时间。比如当待分析数据规模降低,直到在统计上不会掩盖其他少量的异质性地物时;或者迭代过程中某些亚类已经收敛。使用这种技巧,后一项在整个迭代次数P下可以看做一个常数,设为
SVM (Support Vector Machine)方法是使用最为广泛、最具有代表性的监督分类方法,我们将其与本文的IIR方法作简单对比。SVM对样本需求较低,而监督分类如果想到达较好的分类结果,对其样本质量有一定的要求,即每个类别都有一定样本来保证类别间分界线的准确。Burges (1998)在其论文中论述了SVM的复杂度为
综合起来,IIR时间复杂度约为监督分类方法SVM的P·k/(a·b)倍。但由于每次迭代各类别的计算是不相关的,因此可以使用并行计算的方法进一步提高IIR方法的运行速度。
3.6 自动更新方法的评价
为检验自动更新方法的有效性,分别以莫莫格保护区、若尔盖保护区、鄱阳湖和黄河三角洲4个不同湿地保护区所在Landsat OLI影像为实验区,根据各个区域的自然条件(积雪、冻原、海域),自动选取并构建不同的输入数据集进行湿地专题图的自动更新。以自动更新图的总体精度进行定量评价自动更新方法的有效性。制图精度的计算是指各个实验区更新结果的基础上,分层得到在每个湿地类型中均匀分布的随机点,然后根据不同湿地类型在Landsat影像上的光谱曲线特征并结合谷歌地图,对所有随机点的地物类型进行专家判读,然后计算更新结果的总体精度。
另外为比较自动更新方法与传统分类方法,选择了常用的监督分类方法MLC(Maximum Likelihood Classification)和SVM对相同的数据集进行分类。对于莫莫格和若尔盖保护区使用SVM监督分类方法。因为SVM不能处理二值化的输入波段,对鄱阳湖和黄河三角洲两个研究区采用MLC方法进行比较。最大似然法是地物分类中使用最广泛的分类方法之一(Feyisa 等,2014)。然后比较本文自动更新方法和监督分类方法的精度。同时,将对水体湿地和非水体湿地的做相关分析,以检验本文提出的IIR方法与常规监督分类方法结果的相似度。
4 结 果
在4个研究区自动更新的结果中,莫莫格研究区有4个类别,若尔盖有3大类别,鄱阳湖有2大类别,黄河三角洲有4大类别。其中,莫莫格研究区的“水田”这一类别在历史湿地专题分类图中没有提供,在自动更新后“水田”为与湿地相关的未确定属性的未知类,通过人工判读将这一湿地相关的类别赋予“水田”属性,而其他地物类别属性均根据历史专题图获得,其中,4个研究区的原湿地专题图(2008年)和遥感影像(2015年)中部分如图4所示,可以很直观的发现湿地类别和分布发生较大的变化。通过对比可以发现(图4),历史专题图和现在的遥感影像中的地物存在许多不匹配的地方,比如莫莫格保护区该部分中水体和水田都存在很大的差异,若尔盖地区的内陆沼泽对于当前的影像也有极大的变化,鄱阳湖变化较小,黄河三角洲泥滩面积增加。除河流和永久性水体的范围与分布基本保持不变外,其他地物分布特征都存在相当大的变化。

4.1 目视比较
首先,对4个研究区的监督分类方法和IIR算法得到的分类结果的部分进行目视评价,如图5所示。两种分类方法得到的结果总体相似,但细节存在一定的差异。

在莫莫格研究区,水田和沼泽在两种分类结果的细节上存在差异:SVM将水田的地垄误分为内陆沼泽;除此之外,内陆沼泽也存在差异(区域a和区域b),区域b分布有星星点点的水域,是流域内洪泛区域,具有典型湿地特征,而区域a地物的光谱曲线特征与湿地样本的光谱曲线相差较大。这两个细节部分IIR的精度明显高一些。在整幅图范围内,类似于区域b的流域还有许多,监督分类方法因此产生了一定的漏分。在若尔盖研究区,两种算法对沼泽的分类的结果亦有些不同:监督分类方法对沼泽(区域c)存在误分,且部分道路(如d所指示曲线)也被误分为沼泽。鄱阳湖中IIR方法较好地区分了湖泊和河流,而监督分类方法对湖泊和河流的区分要稍微差一些,但鄱阳湖两种分类方法的结果总体比较相似且精度较高。在对黄河三角洲的分类中,两种算法的结果基本完全相同,但也可以看到盐田、水塘等人工设施的分类结果有细微区别,IIR方法在道路、地物边界可以分出更多的细节,而监督分类部分道路或边界(如点e所指向的)被错分类成了湿地相关的类别。
对于地物的边界、具有混合光谱的狭长道路以及差异较小的水体,常规监督分类的方法很难做出较好的区分,这一点在其他的实验或经验中也得到证实(Frazier和Page,2000;Lu 等,2011)。类别在空间上的过渡会使得这些像元表现为虚假的地物特征(混合光谱),而所提的IIR方法的分类结果可以较好地处理这些现象。特别地,IIR可以很好的识别混合像元的情况,而且不用构建选择纯净像元的方法。接下来,对于四个区域总体的精度评价进行定量的分析。
4.2 定量分析比较
所选取的样本点数目分别为:莫莫格保护区所对应的样本数为101(河流)、118(沼泽)、100(湖泊)、134(水田)以及197非湿地共计样本点数目650个。若尔盖保护区的样本点数目分别为43(湖泊)、157(河流)、112(内陆沼泽)以及222(非湿地),共534个样本点。鄱阳湖保护区对应样本点数为114(河流)、87(湖泊)以及非湿地204个,共计405个样本点。黄河三角洲保护区4个类别对应有样本点个数为39(河流)、154(湖泊)、103(潮间带)、57(河口三角洲)以及其他299,共计652个样本点,精度评价结果如表4和表5所示。
表 4 莫莫格保护区和若尔盖保护区制图精度
Table 4 Classification precision of Momoge nature reserve and Zoige reserve
| /% | |||||||||||
| 类型 | 莫莫格 IIR | 莫莫格 SVM | 若尔盖 IIR | 若尔盖 SVM | |||||||
| 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | ||||
| 河流 | 99.01 | 100.00 | 97.03 | 93.33 | 61.15 | 96.00 | 96.82 | 92.12 | |||
| 沼泽 | 70.34 | 83.00 | 57.63 | 58.62 | 67.86 | 92.68 | 75.00 | 83.17 | |||
| 湖泊 | 100.00 | 100.00 | 96.00 | 98.97 | 95.35 | 41.00 | 76.74 | 91.67 | |||
| 水田 | 73.13 | 81.67 | 73.13 | 59.39 | — | — | — | — | |||
| 其他 | 93.40 | 80.00 | 76.14 | 89.82 | 96.85 | 85.32 | 91.89 | 87.93 | |||
| 总体精度 | 86.92 | 78.46 | 80.14 | 88.57 | |||||||
表 5 鄱阳湖保护区和黄河三角洲保护区制图精度
Table 5 Classification precision of Poyang Lake and Yellow River Delta
| /% | |||||||||||
| 类型 | 鄱阳湖 IIR | 鄱阳湖 MLC | 黄河三角洲 IIR | 黄河三角洲 MLC | |||||||
| 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | ||||
| 湖泊 | 100.00 | 87.00 | 98.85 | 77.48 | 61.04 | 94.00 | 54.55 | 92.31 | |||
| 河流 | 87.72 | 97.09 | 76.32 | 98.86 | 87.18 | 35.42 | 87.18 | 34.00 | |||
| 潮汐带 | — | — | — | — | 80.58 | 83.00 | 72.82 | 72.82 | |||
| 三角洲 | — | — | — | — | 100.00 | 36.31 | 98.25 | 32.00 | |||
| 其他 | 98.53 | 99.50 | 100.00 | 99.03 | 66.22 | 99.50 | 0.0 | 0.38 | |||
| 总体精度 | 95.80 | 93.08 | 71.47 | 66.25 | |||||||
总体上看,在4个研究区中,莫莫格保护区、鄱阳湖保护区和黄河三角洲保护区的自动更新结果精度较高,这3个研究区IIR分类结果的总体精度分别为86%、95%和71%,高于相应的监督分类结果精度78%、93%和66%。而若尔盖保护区所对应的精度略低,IIR所得结果的总体精度为80%,相应的监督分类结果精度为88%。
同时,IIR和监督分类方法对于4个研究区中的分类情况具有不同的特点。在莫莫格保护区,IIR和监督分类方法结果中,“沼泽和水田”两类别的精度较低,两类别存在一定的混淆,IIR要明显好于SVM的生产者精度。但同时也注意到,监督分类的用户精度比较低,这与目视解译对比所得到的“监督分类结果的‘沼泽和水田’以及沼泽与非湿地的混淆”致使监督分类的沼泽精度较低的结论一致,这主要是由监督分类大量错分了“水田”的地垄造成的——在整个图幅范围内也是如此。在鄱阳湖地区,水体间有一定的混分,IIR的精度高于MLC,这与鄱阳湖保护区选取的小区域的目视解译中的结果一致。而在若尔盖保护区,IIR方法对湖泊分类的用户精度仅为41%,河流的生产者精度为61%,大大低于监督分类的结果;对于内陆沼泽的用户精度,IIR的结果高于SVM的,这说明IIR的错分比例较低,这与目视解译结论一致。黄河三角洲保护区中IIR和监督分类结果相似,但是水体(河流和湖泊)的精度比较低,“河口三角洲”类别分类精度也比较低。
对单个类别的分析,发现莫莫格保护区和鄱阳湖保护区的所有类别以及若尔盖的沼泽这单一类别和目视解译所得出的结论一致。但是若尔盖保护区和黄河三角洲保护区的“水体”类型以及黄河三角洲的“河口三角洲”类别精度相对较低。
通过对分类结果的分析发现,若尔盖保护区和黄河三角洲保护区的水体类别(河流和湖泊)间存在混淆的现象。当将它们合并为单独的水体一类时,这两个研究区的两种分类算法结果精度提高显著(表6),若尔盖保护区的水体精度从41%和61%提高至99%,黄河三角洲保护区的水体精度从54%和34%提高到了94%。表明这两个研究区的水体(河流和湖泊)的低分类精度主要源自于彼此的混淆。而合并后两个研究区的总体精度也显著提高,说明两个区域较低的精度很大程度上源自于水体间类别混分。说明当使用自动方法进行分类时,对于具有共同水体光谱特征的湿地类型的制图,自动方法还需要发展进一步的其他指标。而对于“河口三角洲”,IIR和监督分类MLC的用户精度都比较低且彼此相似,主要发生在裸地和河口三角洲之间的混淆。这种情况在人工解译时候可以通过专家知识加以判别,而自动方法则需要获取更多不同时相的数据。
表 6 合并水体后的精度
Table 6 Classification precision after combining river and lake
| /% | |||||||||||
| 类型 | 若尔盖 IIR | 若尔盖SVM | 黄河三角洲 IIR | 黄河三角洲 MLC | |||||||
| 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | 生产者精度 | 用户精度 | ||||
| 水体 | 99.00 | 99.00 | 99.00 | 98.51 | 94.82 | 93.37 | 91.19 | 92.15 | |||
| 沼泽 | 67.86 | 92.68 | 75.00 | 83.17 | — | — | — | — | |||
| 潮汐带 | — | — | — | — | 80.58 | 83.00 | 72.82 | 72.82 | |||
| 三角洲 | — | — | — | — | 100.00 | 36.31 | 98.25 | 32.00 | |||
| 其他 | 96.85 | 85.32 | 91.89 | 87.93 | 66.22 | 99.50 | 61.20 | 100.00 | |||
| 总体精度 | 91.57 | 91.01 | 79.90 | 75.15 | |||||||
为定量的给出IIR所得结果的一般性的定量评价,对IIR的分类结果与监督分类的做相似性比较:在水体合并为一个类别的基础上,对IIR和监督分类结果做相关分析,对所有剩余类别分别计算评价空间相关性的Moran’s I指数(如表7所示),其中当该指数值为1时表示类别空间位置上的完全重叠。表7中Moran’s I的对比表明,IIR和监督分类所得水体的分类结果十分接近1,即完全重合,若尔盖保护区的沼泽和莫莫格保护区的水田分类也具有相当高的相似度。但是莫莫格保护区的沼泽和黄河三角洲保护区的潮间带以及河口三角洲具有较大的差异性。
表 7 IIR和监督分类类别的Moran’s I指数
Table 7 Moran’s I between IIR and supervised classification method
| 黄河三角洲 | 若尔盖 | 莫莫格 | 鄱阳湖 | |
| 水体 | 0.92 | 0.82 | 0.97 | 0.94 |
| 沼泽 | — | 0.73 | 0.64 | — |
| 水田 | — | — | 0.78 | — |
| 潮间带 | 0.59 | — | — | — |
| 三角洲 | 0.66 | — | — | — |
| 注:“1”表示完全重叠,“—”表示无值。 | ||||
5 讨 论
首先,对于水体的相关类别(主要为河流与湖泊),受流动性的影响,一般情况下,河流相比湖泊含有更多泥沙,这是使用光谱曲线特征区分两个类别的主要依据。在莫莫格保护区和鄱阳湖保护区水体具有较高的精度,而在若尔盖保护区和黄河三角洲保护区河流和湖泊存在较大的混淆现象,并影响了总体精度。在若尔盖保护区,河道中分布有一些小型积水区,在“历史分类图”中它们被解译为湖泊,这种基于空间特征的解译结果在历史分类图中大量分布,导致自动分类算法IIR不能对两个类别做出很好的区分。IIR主要依靠光谱等自然特征进行分类,自动建立了不同于“历史分类图”的分类体系,比如在黄河三角洲,有大量的沿海海水养殖田和人工水库等将被合并到水体的某一子类,导致这些信息压缩到具有自然特征的湖泊和河流两类的过程中,这种水体的比例在黄河三角洲比较多,由此引发了混分。其次,对于其他的湿地类别,如潮间带和河口三角洲,在IIR和监督分类结果中都出现了分类精度低的问题。特别地,黄河三角洲的潮间带和三角洲类别的生产者精度较高,但用户精度却很低,而且这两个类别在IIR和监督分类结果中空间分布相似度并不是很高,分别为0.59和0.66。这两个类别都是特定区域的典型地物(海滨地区),他们以光滩为主,与人工建筑物存在混分。但因为地理位置的因素,并不影响这两个类别具有较高生产者精度,即漏分比例较低,这一点是基于光谱信息分类较难回避的问题,但可以利用区域位置将这些地物与建筑物、裸地等地物区分开。
除了在这些受限的客观因素条件之外,所提出的更新算法IIR具有极大的优势。首先,基于人工分类时,专家对类别的理解不同会导致类别产生差异(Qi和Zhu,2003),而IIR可以保持前后分类具有最相似的物理意义。在莫莫格保护区,“内陆沼泽”的监督分类结果和IIR存在一定的差异,这种差异导致监督分类在整幅图内存在一定漏分,而样本是由多种沼泽类别中分层均匀采样得到的结果,监督分类的整体结果受制于特征间的差异以及特定类别的沼泽样本在总样本中所占的比例,而IIR可以尽可能的保持“内陆沼泽”中具有显著分布特征的子类别。其次,IIR可以识别出新增的湿地相关类别。如在莫莫格保护区,新时期的遥感影像相比于“历史分类图”,“水田”为一种新增的、分布范围较大且与湿地相关的类别。IIR可以首先确定其空间分布,而这在不事先输入类别信息的情况下获得,而后通过人工判读该类别属性,这可增加专题图的潜在信息量。在批量运算时,可通过分析相邻多图幅类别间关联关系进一步降低这种未知类别的信息冗余度。同时,该算法表现出极大的鲁棒性,4个研究区地物类别差异比较大,比如莫莫格为典型高纬度湿地保护区,若尔盖保护区具有高原湿地的特征,鄱阳湖保护区地处长江中下游,湿润多雨,而黄河三角洲保护区为滨海湿地。在剔除客观因素的影响后,IIR具有很高的更新精度且与监督分类的结果空间分布基本相同。另外一方面,各个研究区以相应保护区的Landsat整幅影像参与运算,这包含了除保护区湿地外的多种其他地物类别,这种输入数据下的更新结果表明所提算法具有较强的适用性。
这些研究区的专题图更新过程是完全自动化的,所输入的仅为新时期的遥感影像和同一空间范围栅格化的历史专题图。所构建的方法可以充分利用计算机的计算能力,同时又可以较高的精度将专题图中专家知识迁移到新的遥感影像中去,一定程度上避免了重复且繁琐的分类过程,增强专题图的时效性。
6 结 论
基于专家知识的湿地专题图的制作,需要耗费大量的人力和时间资源,其具有较高准确性但难以满足对时效性的需求。本文充分利用历史湿地专题图中的信息和数据自身特征,通过自动对专题图采集信息和对新的遥感影像的相关特征分析,以优先获取影像中类别的空间分布,再通过相关分析的方式迁移属性信息的方式,可以有效地解决从旧专题图中获取样本的不可靠性问题,同时对于原专题图中缺失类型的更新(如水稻田)也可以有效解决。通过这种构建的知识迁移的分类方法,可以自动地完成专题图更新,同时,该方法能尽量保持更新前后专题图中对地物类别定义的认知一致性。该自动更新方法可以充分利用存档了的分类数据和计算机的计算能力,提高了专题图制作的效率,充分利用专题图中所累积的专家知识。
本文提出的IIR方法通过分析湿地相关类别的空间分布特征以及与历史湿地专题图中类别的空间分布,可以达到与一般监督分类相似甚至更优的分类结果,而且IIR对于影像中新增类别也有一定的识别能力,避免专题图中新增相关类需要额外人工输入参数的过程。更重要的是,本文需要更新的历史分类图的分类体系为一级类别,往往包含多个有差异性的子类别,且新时期的影像中的湿地分布也随时间发生较大的变化,在这种变化信息比例大的情况下,所提算法IIR不需要准确的位置信息或是严格的光谱特征分析,而是通过空间相关关系分析所完成,比变化检测或信息迁移的更新算法具有更强的鲁棒性,实例证明可以满足湿地大空间范围地图的更新要求。
参考文献(References)
-
Armenakis C, Leduc F, Cyr I, Savopol F and Cavayas F. 2003. A comparative analysis of scanned maps and imagery for mapping applications. ISPRS Journal of Photogrammetry and Remote Sensing, 57 (5/6): 304–314. [DOI: 10.1016/S0924-2716(02)00160-0]
-
Aydav P S S and Minz S. 2015. Modified self-learning with clustering for the classification of remote sensing images. Procedia Computer Science, 58 : 97–104. [DOI: 10.1016/j.procs.2015.08.034]
-
Bernadez F G, Benayas J M R and Martinez A. 1993. Ecological impact of groundwater extraction on wetlands (Douro Basin, Spain). Journal of Hydrology, 141 (1/4): 219–238. [DOI: 10.1016/0022-1694(93)90051-A]
-
Black M, Riley T R, Ferrier G, Fleming A H and Fretwell P T. 2016. Automated lithological mapping using airborne hyperspectral thermal infrared data: a case study from Anchorage Island, Antarctica. Remote Sensing of Environment, 176 : 225–241. [DOI: 10.1016/j.rse.2016.01.022]
-
Bruzzone L, Chi M and Marconcini M. 2006. A novel transductive SVM for semisupervised classification of remote-sensing images. IEEE Transactions on Geoscience and Remote Sensing, 44 (11): 3363–3373. [DOI: 10.1109/TGRS.2006.877950]
-
Bruzzone L and Cossu R. 2002. A multiple-cascade-classifier system for a robust and partially unsupervised updating of land-cover maps. IEEE Transactions on Geoscience and Remote Sensing, 40 (9): 1984–1996. [DOI: 10.1109/TGRS.2002.803794]
-
Bruzzone L, Cossu R and Vernazza G. 2002. Combining parametric and non-parametric algorithms for a partially unsupervised classification of multitemporal remote-sensing images. Information Fusion, 3 (4): 289–297. [DOI: 10.1016/S1566-2535(02)00091-X]
-
Bruzzone L and Prieto D F. 2001. Unsupervised retraining of a maximum likelihood classifier for the analysis of multitemporal remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 39 (2): 456–460. [DOI: 10.1109/36.905255]
-
Bruzzone L and Prieto D F. 2002. A partially unsupervised cascade classifier for the analysis of multitemporal remote-sensing images. Pattern Recognition Letters, 23 (9): 1063–1071. [DOI: 10.1016/S0167-8655(02)00053-3]
-
Burges C J C. 1998. A tutorial on support vector machines for pattern recognition. Data Mining and Knowledge Discovery, 2 (2): 121–167. [DOI: 10.1023/A:1009715923555]
-
Carter V. 1986. An overview of the hydrologic concerns related to wetlands in the United States. Canadian Journal of Botany, 64 (2): 364–374. [DOI: 10.1139/b86-053]
-
Chen J P, Zhang Y and Yu Y J. 2011. Effect of MAUP in spatial autocorrelation. Acta Geographica Sinica, 66 (12): 1597–1606. [DOI: 10.11821/xb201112002] ( 陈江平, 张瑶, 余远剑. 2011. 空间自相关的可塑性面积单元问题效应. 地理学报, 66 (12): 1597–1606. [DOI: 10.11821/xb201112002] )
-
Chen X H, Chen J, Shi Y S and Yamaguchi Y. 2012. An automated approach for updating land cover maps based on integrated change detection and classification methods. ISPRS Journal of Photogrammetry and Remote Sensing, 71 : 86–95. [DOI: 10.1016/j.isprsjprs.2012.05.006]
-
Davidson N C. 2014. How much wetland has the world lost? Long-term and recent trends in global wetland area. Marine and Freshwater Research, 65 (10): 934–941. [DOI: 10.1071/MF14173]
-
Demir B, Bovolo F and Bruzzone L. 2013. Updating land-cover maps by classification of image time series: a novel change-detection-driven transfer learning approach. IEEE Transactions on Geoscience and Remote Sensing, 51 (1): 300–312. [DOI: 10.1109/TGRS.2012.2195727]
-
Feyisa G L, Meilby H, Fensholt R and Proud S R. 2014. Automated water extraction index: a new technique for surface water mapping using Landsat imagery. Remote Sensing of Environment, 140 : 23–35. [DOI: 10.1016/j.rse.2013.08.029]
-
Frazier P S and Page K J. 2000. Water body detection and delineation with Landsat TM data. Photogrammetric Engineering and Remote Sensing, 66 (12): 1461–1468.
-
Fu B J, Chen L D and Liu G H. 1999. The objectives, tasks and characteristics of China ecological regionalization. Acta Ecologica Sinica, 19 (5): 591–595. [DOI: 10.3321/j.issn:1000-0933.1999.05.001] ( 傅伯杰, 陈利顶, 刘国华. 1999. 中国生态区划的目的、任务及特点. 生态学报, 19 (5): 591–595. [DOI: 10.3321/j.issn:1000-0933.1999.05.001] )
-
Gan H T, Sang N, Huang R, Tong X J and Dan Z P. 2013. Using clustering analysis to improve semi-supervised classification. Neurocomputing, 101 : 290–298. [DOI: 10.1016/j.neucom.2012.08.020]
-
Gong Z N, Zhang Y R, Gong H L and Zhao W J. 2011. Evolution of wetland landscape pattern and its driving factors in Beijing. Acta Geographica Sinica, 66 (1): 77–88. [DOI: 10.11821/xb201101008] ( 宫兆宁, 张翼然, 宫辉力, 赵文吉. 2011. 北京湿地景观格局演变特征与驱动机制分析. 地理学报, 66 (1): 77–88. [DOI: 10.11821/xb201101008] )
-
Grinand C, Arrouays D, Laroche B and Martin M P. 2008. Extrapolating regional soil landscapes from an existing soil map: sampling intensity, validation procedures, and integration of spatial context. Geoderma, 143 (1/2): 180–190. [DOI: 10.1016/j.geoderma.2007.11.004]
-
Hoffmann A, Van der Vegt J W and Lehmann F. 2000. Towards automated map updating: is it feasible with new digital data-acquisition and processing techniques//International Archives of Photogrammetry and Remote Sensing XXXIII, Part B2. Amsterdam, The Netherlands: ISPRS: 295–302
-
Hong S and Vatsavai R R. 2016. Sliding window-based probabilistic change detection for remote-sensed images. Procedia Computer Science, 80 : 2348–2352. [DOI: 10.1016/j.procs.2016.05.438]
-
Hu S J, Niu Z G and Chen Y F. 2017. Global wetland datasets: a review. Wetlands, 37 (5): 807–817. [DOI: 10.1007/s13157-017-0927-z]
-
Hussain M, Chen D M, Cheng A, Wei H and Stanley D. 2013. Change detection from remotely sensed images: from pixel-based to object-based approaches. ISPRS Journal of Photogrammetry and Remote Sensing, 80 : 91–106. [DOI: 10.1016/j.isprsjprs.2013.03.006]
-
Janez F, Goretta O and Michel A. 2000. Automatic map updating by fusion of multispectral images in the Dempster-Shafer framework//Proceedings of SPIE 4115, Applications of Digital Image Processing XXIII. San Diego, CA: SPIE [DOI: 10.1117/12.411549]
-
Jung F. 2004. Detecting building changes from multitemporal aerial stereopairs. ISPRS Journal of Photogrammetry and Remote Sensing, 58 (3/4): 187–201. [DOI: 10.1016/j.isprsjprs.2003.09.005]
-
Knudsen T and Olsen B P. 2003. Automated change detection for updates of digital map databases. Photogrammetric Engineering and Remote Sensing, 69 (11): 1289–1296. [DOI: 10.14358/PERS.69.11.1289]
-
Leduc F, Solaiman B and Cavayas F. 2001. Combination of fuzzy sets and Dempster-Shafer theories in forest map updating using multispectral data//Proceedings of SPIE 4385, Sensor Fusion: Architectures, Algorithms, and Applications V. Orlando, FL: SPIE [DOI: 10.1117/12.421120]
-
Leichtle T, Geiß C, Wurm M, Lakes T and Taubenböck H. 2017. Unsupervised change detection in VHR remote sensing imagery – an object-based clustering approach in a dynamic urban environment. International Journal of Applied Earth Observation and Geoinformation, 54 : 15–27. [DOI: 10.1016/j.jag.2016.08.010]
-
Liu G L, Zhang L C, Liu J and Li G Y. 2013. Water body information extraction based on Landsat TM remote sensing imagery. Journal of University of Chinese Academy of Sciences, 30 (5): 644–650. [DOI: 10.7523/j.issn.2095-6134.2013.05.011] ( 刘桂林, 张落成, 刘剑, 李广宇. 2013. 基于Landsat TM影像的水体信息提取. 中国科学院大学学报, 30 (5): 644–650. [DOI: 10.7523/j.issn.2095-6134.2013.05.011] )
-
Lu S L, Wu B F, Yan N N and Wang H. 2011. Water body mapping method with HJ-1A/B satellite imagery. International Journal of Applied Earth Observation and Geoinformation, 13 (3): 428–434. [DOI: 10.1016/j.jag.2010.09.006]
-
McFeeters S K. 1996. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. International Journal of Remote Sensing, 17 (7): 1425–1432. [DOI: 10.1080/01431169608948714]
-
Nauman T W and Thompson J A. 2014. Semi-automated disaggregation of conventional soil maps using knowledge driven data mining and classification trees. Geoderma, 213 : 385–399. [DOI: 10.1016/j.geoderma.2013.08.024]
-
Niederöst M. 2001. Automated update of building information in maps using medium-scale imagery. Baltsavias E P, ed. Automatic Extraction of Man-Made Objects from Aerial and Space Images (III). Lisse: Swets and Zeitlinger: 161–170
-
Niu Z G, Zhang H Y, Wang X W, Yao W B, Zhou D M, Zhao K Y, Zhao H, Li N N, Huang H B, Li C C, Yang J, Liu C X, Liu S, Wang L, Li Z, Yang Z Z, Qiao F, Zheng Y M, Chen Y L, Sheng Y W, Gao X H, Zhu W H, Wang W Q, Wang H, Weng Y L, Zhuang D F, Liu J Y, Luo Z C, Cheng X, Guo Z Q and Gong P. 2012. Mapping wetland changes in China between 1978 and 2008. Chinese Science Bulletin, 57 (16): 1400–1411. [DOI: 10.1007/s11434-012-5093-3] ( 牛振国, 张海英, 王显威, 姚文博, 周德民, 赵魁义, 赵惠, 李娜娜, 黄华兵, 李丛丛, 杨军, 柳彩霞, 刘爽, 王琳, 李展, 杨镇钟, 乔飞, 郑姚闽, 陈炎磊, 盛永伟, 高小红, 朱卫红, 王文卿, 王红, 翁永玲, 庄大方, 刘纪远, 罗志才, 程晓, 郭子琪, 宫鹏. 2012. 1978~2008年中国湿地类型变化. 科学通报, 57 (16): 1400–1411. [DOI: 10.1007/s11434-012-5093-3] )
-
Pásztor L, Laborczi A, Bakacsi Z, Szabó J and Illés G. 2018. Compilation of a national soil-type map for Hungary by sequential classification methods. Geoderma, 311 : 93–108. [DOI: 10.1016/j.geoderma.2017.04.018]
-
Qi F and Zhu A X. 2003. Knowledge discovery from soil maps using inductive learning. International Journal of Geographical Information Science, 17 (8): 771–795. [DOI: 10.1080/13658810310001596049]
-
Rathore M M U, Ahmad A, Paul A and Wu J J. 2016. Real-time continuous feature extraction in large size satellite images. Journal of Systems Architecture, 64 : 122–132. [DOI: 10.1016/j.sysarc.2015.11.006]
-
Rosenberg C, Hebert M and Schneiderman H. 2005. Semi-supervised self-training of object detection models//Proceedings of the 7th IEEE Workshops on Application of Computer Vision. Breckenridge, CO, USA: IEEE: 29–36 [DOI: 10.1109/ACVMOT.2005.107]
-
Rouse Jr W J, Haas R H, Schell J A and Deering D W. 1974. Monitoring vegetation systems in the Great Plains with ERTS. PAPER-A20, Washington DC: NASA: 309–317
-
Saito A and Yamazaki T. 1999. Characteristics of spectral reflectance for vegetation ground surfaces with snow-cover; vegetation indices and snow indices. Journal of Japan Society of Hydrology and Water Resources, 12 (1): 28–38. [DOI: 10.3178/jjshwr.12.28]
-
Tebbs E J, Remedios J J, Avery S T and Harper D M. 2013. Remote sensing the hydrological variability of Tanzania’s Lake Natron, a vital Lesser Flamingo breeding site under threat. Ecohydrology and Hydrobiology, 13 (2): 148–158. [DOI: 10.1016/j.ecohyd.2013.02.002]
-
Walter V. 2004. Object-based classification of remote sensing data for change detection. ISPRS Journal of Photogrammetry and Remote Sensing, 58 (3/4): 225–238. [DOI: 10.1016/j.isprsjprs.2003.09.007]
-
Wang Z M, Zhang S Q and Zhang B. 2004. Effects of land use change on values of ecosystem services of Sanjiang Plain, China. China Environmental Science, 24 (1): 125–128. [DOI: 10.3321/j.issn:1000-6923.2004.01.028] ( 王宗明, 张树清, 张柏. 2004. 土地利用变化对三江平原生态系统服务价值的影响. 中国环境科学, 24 (1): 125–128. [DOI: 10.3321/j.issn:1000-6923.2004.01.028] )
-
Wright C and Gallant A. 2007. Improved wetland remote sensing in Yellowstone National Park using classification trees to combine TM imagery and ancillary environmental data. Remote Sensing of Environment, 107 (4): 582–605. [DOI: 10.1016/j.rse.2006.10.019]
-
Wu S H, Yang Q Y and Zheng D. 2003. Comparative study on Eco-geographic regional systems between China and USA. Acta Geographica Sinica, 58 (5): 686–694. [DOI: 10.3321/j.issn:0375-5444.2003.05.006] ( 吴绍洪, 杨勤业, 郑度. 2003. 生态地理区域系统的比较研究. 地理学报, 58 (5): 686–694. [DOI: 10.3321/j.issn:0375-5444.2003.05.006] )
-
Xie H L, Liu L M, Li B and Zhang X S. 2006. Spatial autocorrelation analysis of multi-scale land-use changes: a case study in Ongniud Banner, Inner Mongolia. Acta Geographica Sinica, 61 (4): 389–400. [DOI: 10.3321/j.issn:0375-5444.2006.04.006] ( 谢花林, 刘黎明, 李波, 张新时. 2006. 土地利用变化的多尺度空间自相关分析——以内蒙古翁牛特旗为例. 地理学报, 61 (4): 389–400. [DOI: 10.3321/j.issn:0375-5444.2006.04.006] )
-
Yan P, Zhang Y J and Zhang Y. 2007. A study on information extraction of water system in semi-arid regions with the Enhanced Water Index (EWI) and GIS based noise remove techniques. Remote Sensing Information, 22 (6): 62–67. [DOI: 10.3969/j.issn.1000-3177.2007.06.015] ( 闫霈, 张友静, 张元. 2007. 利用增强型水体指数(EWI)和GIS去噪音技术提取半干旱地区水系信息的研究. 遥感信息, 22 (6): 62–67. [DOI: 10.3969/j.issn.1000-3177.2007.06.015] )
-
Zhang H Y, Zhou D M and Wang Y H. 2009. The changing process of wetland landscape in Honghe national nature reserve and surrounding farms in Sanjiang Plain. Remote Sensing Technology and Application, 24 (1): 57–62. ( 张海英, 周德民, 王一涵. 2009. 三江平原洪河自然保护区及周边地区湿地景观变化过程研究. 遥感技术与应用, 24 (1): 57–62. )
-
Zhang S L and Zhang K. 2007. Comparison between general Moran’s index and getis-ord general G of spatial autocorrelation. Acta Scientiarum Naturalium Universitatis Sunyatseni, 46 (4): 93–97. [DOI: 10.3321/j.issn:0529-6579.2007.04.021] ( 张松林, 张昆. 2007. 全局空间自相关Moran指数和G系数对比研究. 中山大学学报(自然科学版), 46 (4): 93–97. [DOI: 10.3321/j.issn:0529-6579.2007.04.021] )
-
Zhang X L, Xiao P F, Feng X Z and Yuan M. 2017. Separate segmentation of multi-temporal high-resolution remote sensing images for object-based change detection in urban area. Remote Sensing of Environment, 201 : 243–255. [DOI: 10.1016/j.rse.2017.09.022]


