

|
收稿日期: 2017-09-05; 优先数字出版日期: 2018-01-01
基金项目: 国家自然科学基金(编号:51675076,51505062);国家自然科学基金创新研究群体项目(编号:51621064);中央高校基本科研业务费(编号:DUT17GF109,DUT16TD20)
第一作者简介: 褚金奎,1965年生,男,教授,研究方向为微纳机电系统与偏振导航。E-mail:chujk@dlut.edu.cn
中图分类号: TP701
文献标识码: A
|
摘要
大气偏振效应不仅可应用于高分辨率定量遥感,其偏振场模式图还可作为偏振导航的信息源。大气偏振场模式图在不同时空与天气条件下对偏振传感器的导航精度有重要影响,天空偏振场图的精确获取与建模、测量精度与误差分析是研究的重要内容。本文从大气偏振模式图的分布和偏振导航传感器两方面介绍仿生偏振导航技术的研究进展。首先介绍瑞利散射理论、米氏散射理论和基于矢量传输方程的偏振模式图光场分布理论,总结了不同方法的适用范围;其次分别介绍日光和月光、陆地和海洋等不同时间、空间环境以及不同天气条件下的偏振模式图分布测试结果,并对比分析了理论仿真与测试结果的异同,同时又介绍了基于云解算的偏振模式图精度测试误差分析;最后通过介绍偏振导航传感器装置的发展历史和研究成果,指出偏振导航应用于组合导航中的广阔前景。目前,本课题组已研制的偏振光导航传感器室内精度可达0.1°,验证了天空偏振光场模式图的客观有效性,为高分辨率偏振遥感技术提供了技术证明。
关键词
大气光学, 偏振光场, 仿生导航, 偏振导航, 组合导航
Abstract
Skylight polarization field patterns are not only used in high-resolution quantitative remote sensing but are also known as the source of polarization navigation information. Polarization navigation technology for biomimetic insects is a hotspot in navigation and bionic fields. Scientists have found a stable polarization distribution in the sky with the height of the sun. In addition, biologists have found that various insects can use their compound eyes to detect polarization information and achieve navigation and positioning function. Hence, domestic and foreign scholars have conducted extensive research on the mechanism of polarized light navigation sensor of bionic insect compound eyes. Further research into the precision mapping rules between polarization field patterns and polarization sensors under different space–time conditions, the accurate acquisition and modeling of skylight polarization field patterns, and the measurement accuracy and error analysis for information integration of skylight polarization field patterns under multi-space–time conditions is important. In this study, the research progress of polarized navigation is introduced from the aspects of atmospheric polarization field distribution and polarization navigation technique. The theoretical basis for describing the polarization distribution is introduced. Rayleigh scattering theory is similar to the clear cloudless atmospheric polarization model. Mie scattering theory and the vector radiative transfer equation consider the effects of cloud scattering, and they are closer to the true atmospheric polarization. The effect of polarization distribution test under different weather conditions is then described in the background of land, ocean, and sunlight and moonlight to compare the differences from neutral points under different conditions. The variation law and physical characteristics of the polarization vector field are summarized. The polarization distribution pattern of the whole weather is proved, which shows that the whole weather has the same variation law but is different in the polarization index. At the same time, the detectable and information utilization of the atmospheric polarized vector field during the day is higher than that at night. Meanwhile, the measurement error analysis based on cloud computing is presented. Finally, the development history and research results about accuracy assessment of polarized navigation devices at home and abroad are introduced. The broad application of polarization navigation in integrated navigation is pointed out. At present, polarized light navigation sensors can be divided into two types, namely, point-source and imaging types. The point-source type has good real-time performance and imaging robustness. However, its anti-interference ability is poor, making it difficult to achieve real-time measurement. In precision measurement, the point-source type is higher than the imaging type, and the highest accuracy it can reach is 0.1 degrees of navigation accuracy without drift error. A polarized light navigation system is characterized by autonomy with non-accumulative errors. In this study, the combined applications of polarized light navigation sensors and GPS, gyroscopes, and other navigation devices are introduced, and the research direction of polarized light navigation sensors is pointed out. Polarized light navigation is one of the practical applications of atmospheric polarization vector fields. The objective validity of skylight polarization field patterns is verified, and a practical guidance for high-resolution quantitative remote sensing technology is provided.
Key words
atmospheric optics, polarized light field, bionic navigation, polarized navigation, combined navigation
1 引 言
偏振作为光学信息的第4维特征,因“弱光强化、强光弱化”的特点,成为追求高分辨率定量遥感技术的研究热点。学者们发现受地球大气气溶胶等影响,天空光随太阳高度角的变化反映出实时性的稳定偏振分布特征,经偏振光测试系统验证,可以得到一定时刻的偏振分布模式图(偏振光场图)。
生物学家研究发现,部分具有复眼结构的昆虫可以利用复眼对大气中偏振矢量信息进行识别,并因此实现导航定位功能,这与人类研究导航定位的思想不谋而合。天空光这种稳定的偏振分布能够很好的作为信息源应用于导航领域,通过研究此类昆虫的导航机理,研究人员根据昆虫的偏振敏感结构仿生开发出了多种利用天空光偏振矢量导航的传感器。这种传感器具有自主式、无误差累计、实时性等特点,成为了大气偏振模式场的特点应用之一。本文根据大气偏振光场的分布测试,详细介绍了全天空光偏振模式图的规律及物理特性,并分析了基于地球偏振矢量场的仿生偏振导航技术的研究进展及其组合导航的应用现状。
2 偏振光场分布理论研究进展
2.1 瑞利散射
16世纪,法国学者Arago发现了天空光的偏振现象,Rayleigh(1871)通过研究大气粒子的散射特性,对这一现象做出了解释,提出了瑞利散射理论。当太阳光在经过大气层时,大气中的浮游粒子(空气、气溶胶颗粒等)使入射光发生了散射和吸收,当大气中浮游粒子的直径远小于入射光波长时出现瑞利散射现象,这种散射主要由大气中的原子和分子,如N、CO2、O3和O2等引起的。
在晴朗无云的天气条件下,大气中小直径的粒子占多数,可以采用瑞利散射理论建立偏振光场分布的模型。
以Rayleigh散射理论为基础,将偏振光理想化为100%的线偏振光,散射次数为单次散射,通过在地平坐标系上观测点、太阳位置与坐标原点的几何关系,计算出天空光的偏振参数,建立晴朗无云条件下简单的大气偏振分布模型(图1)。


在地平坐标系中,已知太阳高度角和方位角分别为θp和Ψp,观测方向的高度角和方位角分别为θ和Ψ,可以确定太阳位置P(r,θp,Ψp),观测点位置V(r,θ,Ψ),γ为PO与VO的夹角,r为地平坐标系球半径,根据Rayleigh散射单次散射前后观测点偏振态的关系,利用几何法求解观测点V的偏振度为
| $P = {P_{\max }}\frac{{1 - {{\cos }^2}\gamma }}{{1 + {{\cos }^2}\gamma }}$ | (1) |
式中,
该观测点的偏振方位角为
| $\tan \chi = \frac{{\sin \theta \cos {\theta _{\rm{p}}} - \cos \theta \cos \left({\varPsi - {\varPsi _{\rm{p}}}} \right)\sin {\theta _{\rm{p}}}}}{{\sin \left({\varPsi - {\varPsi _{\rm{p}}}} \right)\sin {\theta _{\rm{p}}}}}$ | (2) |
由式(2)可知,通过观测天空,可以得到一幅稳定的光偏振理论分布图。从中能够获得导航所需的各种信息。
大连理工大学褚金奎课题组(赵开春等,2007)根据Rayleigh散射理论,忽略多次散射和椭圆偏振,利用visual C++ 开发了可视化的大气偏振信息获取系统,实现了天空光偏振分布模式的仿真,并能够预测不同时间、不同地点天空光探测点的偏振信息。合肥工业大学高隽团队张旭东等人(2010)采用电矢分量法研究光波散射,从电场角度分析了自然光的单次瑞利散射过程,建立了一种新的理想大气偏振模型。
2.2 米氏散射
在阴雨、多云等复杂天气条件,大气粒子尺度大,常发生多次散射,瑞利散射模型无法表达多次散射等复杂的散射过程。Mie(1908)提出了各向同性的均匀球体对平面电磁散射的精确解,即米氏(Mie)散射理论。当大气中悬浮粒子的直径与辐射波长相当时,散射主要为Mie散射。
中国科学院上海光学精密机械研究所黄旭锋等人(2010)基于Mie散射理论建立了单次光散射偏振模型,并搭建了矢量偏振分析装置测量了不同天气情况下大气偏振光光偏振度和太阳光单次散射角。合肥工业大学高隽团队吴良海等人(2011)在研究Mie散射理论的基础上,对大气中气溶胶等粒子的散射辐射特性进行了仿真分析,研究了多种粒子的偏振特性。大连理工大学覃彬等人(2013)利用MATLAB对大气偏振光进行了基于Mie散射理论的单粒子散射的仿真研究,分析了典型的不同尺寸气溶胶粒子数条件下的大气偏振特性,并搭建了大气偏振光测量系统,研究了有源、无源空间的偏振光测试适用波段,同时也表明Mie散射更贴近于实际的大气散射,也证明了Mie散射的局限性。
2.3 矢量辐射传输方程
矢量辐射传输方程是描述电磁波在介质中传播及其再分配方式的基本方程,该方法可以用来研究气溶胶等大气粒子对偏振模式图的影响,相比Mie散射应用的局限性,矢量传输方程能更好的应用于研究大气偏振模式分布与物理因素的相关性。
Buras和 Mayer(2011)提出了基于蒙特卡罗法的矢量辐射传输模型,使大气偏振模式图的分析中加入了气溶胶、云滴等粒子散射吸收效应的影响,可以用于建立更实际的大气偏振模型。
大连理工大学王威等人(2013)利用简化的双层大气模式模拟实际大气,以基于倍加—累加法的矢量辐射传输模式求解矢量辐射传输方程,得到全天空离散点的Stokes参数,通过计算天空各点的偏振信息,建立了大气偏振模型。合肥工业大学王子谦等人(2014)利用蒙托卡罗法提出了一种混浊大气偏振模式的建模方法,对混浊大气的偏振模式分布与变化特性进行分析和预测。
3 偏振分布测试研究进展
3.1 偏振分布测试机理及测试系统
由于用斯托克斯矢量S=(I,Q,U,V)T可完全表征一束光束的偏振状态,其中I为总光强,Q、U分别代表两个正交方向上的线偏振光,V代表圆偏振光。而用米勒矩阵可以描述入射光穿过偏振器件前后的矢量变化。在大气偏振测量中,可以忽略圆偏振的影响,则出射偏振光S′与入射光S的关系可以表示为
| $\left[ {\begin{array}{*{20}{c}}\!\!\!\! {I'} \!\!\!\! \\\!\!\!\! {Q'} \!\!\!\! \\\!\!\!\! {U'} \!\!\!\! \end{array}} \right] = \frac{1}{2}\left[ {\begin{array}{*{20}{c}}\!\!\!\! 1&{\cos 2\varphi }&{\sin 2\varphi } \!\!\!\! \\\!\!\!\! {\cos 2\varphi }&{{{\cos }^2}2\varphi }&{\sin 2\varphi \cos 2\varphi } \!\!\!\! \\\!\!\!\! {\sin 2\varphi }&{\sin 2\varphi \cos 2\varphi }&{{{\sin }^2}2\varphi } \!\!\!\! \end{array}} \right]\left[ {\begin{array}{*{20}{c}}\!\!\!\! I \!\!\!\! \\\!\!\!\! Q \!\!\!\! \\\!\!\!\! U \!\!\!\! \end{array}} \right]$ | (3) |
忽略圆偏振的影响,通过对天空进行扫描,检测3个不同方向的线性光学检偏器的偏振信息,得到米勒矩阵的参数,便可得到大气偏振模式的测试图。
Brines等人(1982)采用点源式偏振测量装置,通过对天空偏振光进行旋转扫描测量,建立了简化的全天空偏振模式图,实现了对整个天空偏振信息的测量。Voss等人(1997)采用鱼眼镜头及相机,搭建了成像式偏振光探测系统,对线偏振光的偏振信息进行了实时探测,但图像噪点和镜头畸变等因素影响了偏振信息的准确性。Horváth(2002)利用3台照相机开发了成像式全天空偏振测试仪,这种仪器可以同时获得天空偏振的3张图片,通过斯托克斯矢量法得到偏振度分布图和偏振方位角分布图。
大连理工大学Cui等人(2009)搭建了全天空偏振模式图测量系统,系统由计算机、赤道仪、光纤光谱仪和配备了可旋转偏振片的改进式天文望远镜组成。崔岩等人(2013)搭建了新的全天空偏振测量系统(图2),通过旋转偏振片至0°,45°和90°,利用装有鱼眼镜头的单反相机获取天顶方向的3张彩色图像,在Matlab中处理偏振信息,得到全天空的偏振模式图。

清华大学卢皓等人(2014)设计搭建了可以连续旋转检偏器的偏振成像探测装置。利用光电传感器对透射过连续旋转的检偏器的光强积分,得到偏振信息,实现了对运动目标与天空偏振光的分布模式进行实时、有效的探测。
3.2 偏振模式分布规律
偏振模式的分布受大气空气分子、气溶胶、云层物理特性等多种环境因素的影响,因此在不同的天气条件下表现出不同的分布规律。太阳的位置决定了偏振模式图中性点的位置,中性点附近的偏振方位角不稳定,偏振度和偏振方位角绕中性点中心对称分布。
Horváth等人(1999)测试了日出过程中天空光偏振模式的变化,分析了偏振分布模式与太阳位置的关系,并在2004年测试分析了阴天情况下的天空偏振分布与传统Rayleigh散射模型的差异。Kreuter等人(2010)利用可自动旋转偏振片的鱼眼相机研究了气溶胶、地球表面反照率对偏振度和天空辐照的影响。表明随地表反照率的增大,偏振度减小,辐照量增大。
中国科学院长春光学精密机械与物理研究所模拟遥感实验室、中科院安徽光学精密机械研究所、中国科学院遥感与数字地球研究所、北京大学、清华大学、国防科技大学、合肥工业大学、大连理工大学等多家单位同样开展了天空偏振模式的相关研究工作。其中,中国科学院安徽光学精密机械研究所孙晓兵等人(2005)使用偏振辐射测量仪测量了不同时空下合肥的大气偏振分布规律。北京大学空间信息集成与3S工程应用实验室晏磊等人(2009)利用全天空偏振测量方法,验证了天空偏振模式图对称于最大偏振线和太阳子午线,且整个天空偏振模式图围绕天极点以15°/h的速度旋转。对全波段的天空偏振光在不同天气条件下的分布进行了研究,结果表明在不同天气条件下不同波段天空偏振度分布有差异,且蓝色波段更适用于偏振光探测及导航。
大连理工大学课题组曹楠楠(2008)利用全天空偏振测量系统测量了9:00—18:00大连的天空偏振分布模式,研究了散射光的辐射度和偏振度与波长的关系。王威等人(2013)研究了气溶胶等颗粒对于天空偏振辐射的影响。证明随着气溶胶光学厚度的增大,偏振度逐渐减小,长波长波段的偏振度的衰减更明显。崔岩等人(2013)对晴朗天气下曙暮光及不同时刻太阳光的偏振分布进行了测量,验证了曙暮光偏振模式测试分布图与太阳光偏振模式理论图更接近,证明了太阳光偏振效应在曙暮光期间的天空偏振模式中占主导地位。
3.3 月光偏振分布测试
夜间光源主要由太阳光、月光和其他宇宙光构成,月球反射的太阳光占夜间光源的主要部分。Jensen等人(2001)建立了一个夜间天空光的物理模型,对天空光的主要成分进行了分析,及不同光源对夜间成像效果的影响。Gál等人(2001)利用成像式全天空测试系统对满月晴朗夜间月光的偏振模式进行了测量,研究了中性点的特点。Dacke等人(2003, 2004)发现蜣螂能够利用月光的偏振模式实现导航定位,引起了学者们对月光偏振模式的重视。Ugolnikov等人(2004)利用CCD测量了黄昏时分天空的偏振分布,研究了大气气溶胶和多次散射对不同波段微光条件下的偏振特性的影响,发现多次散射和大气气溶胶对不同波段微光的偏振特性产生了重要影响,且黄昏的不同时刻,天空的偏振特性不同。
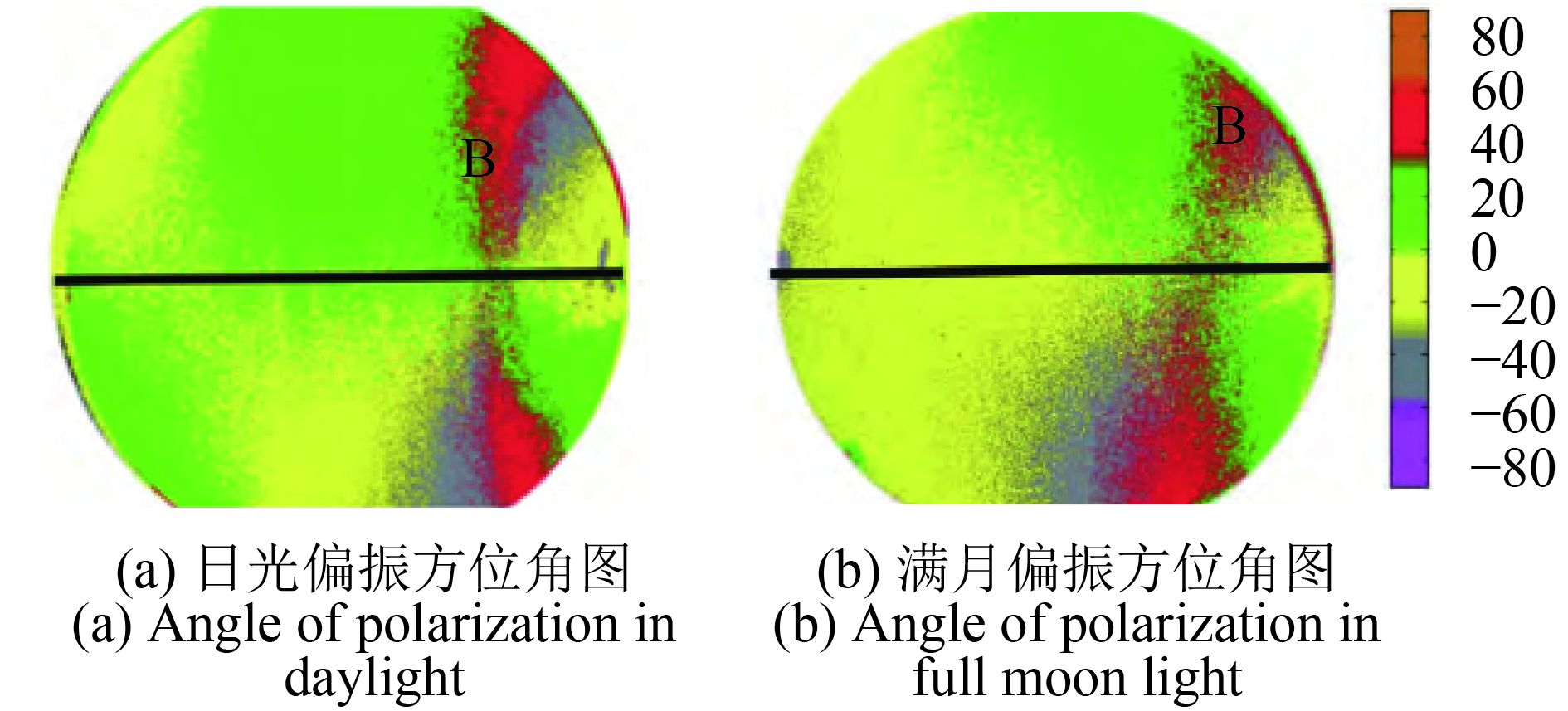
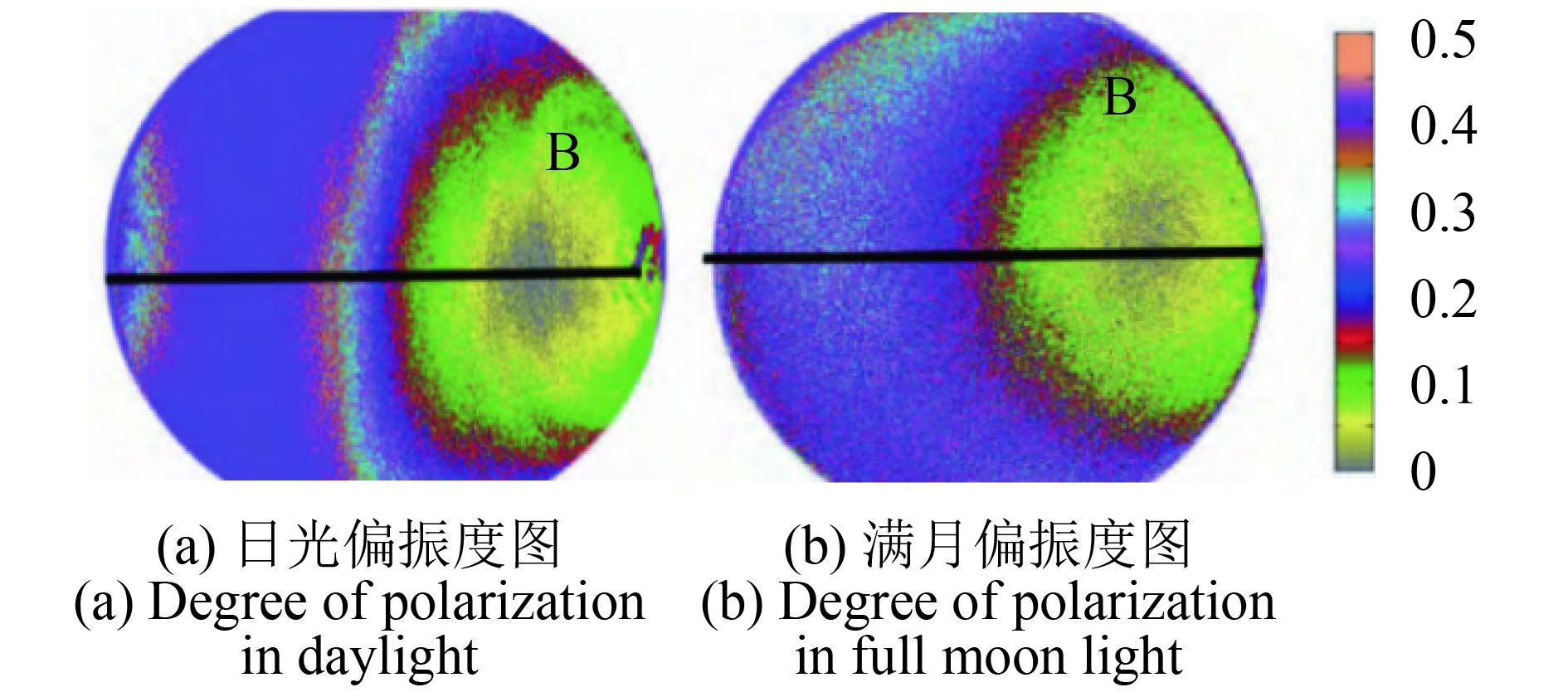
大连理工大学课题组崔岩等人(2013)用成像式全天空偏振光测试系统分别对太阳光、暮光和满月月光的天空偏振模式进行了测试,对比分析了不同时刻中性点和子午线方向的特点。崔岩等人(2014)研究了晴朗天气条件下满月天空的偏振分布模式,建立了基于Rayleigh散射理论的满月天空偏振分布模型,并利用测试分析了太阳光和月光天空散射光的偏振特性(图3,图4),图中B表示中性点位置,实验证明光强大小对偏振度和偏振方位角不产生影响。
3.4 海洋偏振分布
海洋上空多为水云、多雾的天气条件,天空光的散射现象更为复杂。Hegedüs等人(2007)把北冰洋多云和雾天的天空光偏振模式和晴朗天气的进行对比研究。Barta等人(2015)通过测量天空偏振光获取海洋上空的云层覆盖面积。
大连理工大学课题组刘琦等人(2014)在libRadtran软件上利用蒙特卡罗法求解矢量辐射传输方程,建立了水云天气下的全天空大气偏振模型,分析了光学波段、气溶胶、水云物理参数与大气偏振分布的相关性。结果表明,偏振度随水云光学厚度增大和有效半径的减小而减小,且波长越长,偏振度下降趋势越明显。崔岩等人(2017)基于Rayleigh散射理论对黄海海域上日光和月光偏振模式进行仿真分析(图5),并利用全天空偏振测量系统对海洋天空光偏振模式进行测试分析,晴朗天气条件下海洋与陆地的偏振模式分布类似,实验证明湿度较大的海洋天空光的偏振模式图分布仍然可观,可以用于海洋定向导航。
4 偏振导航技术研究现状
4.1 昆虫偏振导航机理
瑞士生物神经学家Harváth(1999)研究发现,沙蚁具有对天空光偏振方向极为敏感的视觉神经系统,能够利用天空的偏振模式图进行导航定位。沙蚁的视网膜上的每一个神经感杆是由两个互相交叉垂直的单向感光器组成,仅对同向的偏振光敏感。神经感杆阵列响应不同的偏振方向矢量,形成偏振敏感罗盘,当体轴方向变化时产生不同的激励响应,且在体轴与太阳子午线夹角分别为0°、60°、120°时有最大响应。最终通过视神经的偏振对抗中间神经元(POL神经元)解算、译码,得到体轴与太阳子午线的夹角,实现导航定位。
4.2 偏振导航传感器
Lambrinos等人(1997)模仿沙蚁的偏振导航机理,利用无机光电材料研制了偏振敏感罗盘模型,设计多通道的偏振光传感器,每个传感器由线性检偏器和蓝色滤光片的光电二极管构成的,选取0°、60°、120°偏振检测方向,通过对数放大器解算检测到的天顶位置的偏振光信息,实现了移动机器人的导航,验证了仿生偏振导航的可行性。Schmolke等人(2002)通过人造偏振光,在室内实现了移动机器人路径跟踪实验。Chahl等人(2012)在无人机上对开发的仿蜻蜓复眼的偏振光导航传感器进行了测试。
大连理工大学褚金奎课题组从2004年开始研究仿生偏振导航传感器(褚金奎和赵开春,2005),基于Rayleigh散射理论建立了大气偏振模型,并在中国率先开发了仿生导航传感器样机,目前已有多种类型的偏振光导航传感器,并实现了无漂移±0.1°的室内导航精度。褚金奎和赵开春(2005)根据昆虫偏振导航的敏感机理,分析了偏振敏感神经元模型的测角算法,对扫描并发式的两种算法进行了改进,提高了算法的角度分辨率和计算速度。并通过模仿沙蚁的3对不同偏振角度敏感的偏振神经元,利用偏振片、光电二极管和对数运算放大器,把偏振光信号转化为三路电压信号,设计了仿昆虫POL神经元模型的六通道偏振光测试实验装置。刘利兵等人(2006)搭建了一种基于嵌入式ARM微处理器的偏振光导航传感器的原理样机(图6),通过室外环境测试和机器人路径导航实验,验证了传感器的高精度和误差不随时间累积的特性。

褚金奎等人(2011)根据传感器样机搭建了六通道的仿生导航传感器(图7),利用传感器搭载的时钟模块和GPS模块获取地理位置的正北信息,求解体轴与正北方向的夹角实现导航。

Chu等人(2013)利用MEMS工艺在同一聚碳酸酯基底上压制了6个不同方向的双层金属光栅,搭建了模块化的集成偏振光导航传感器,偏振光检测模块为基于双层金属纳米光栅的集成器件,偏振信息处理模块为MSP430,实现了传感器的集成化(图8)。

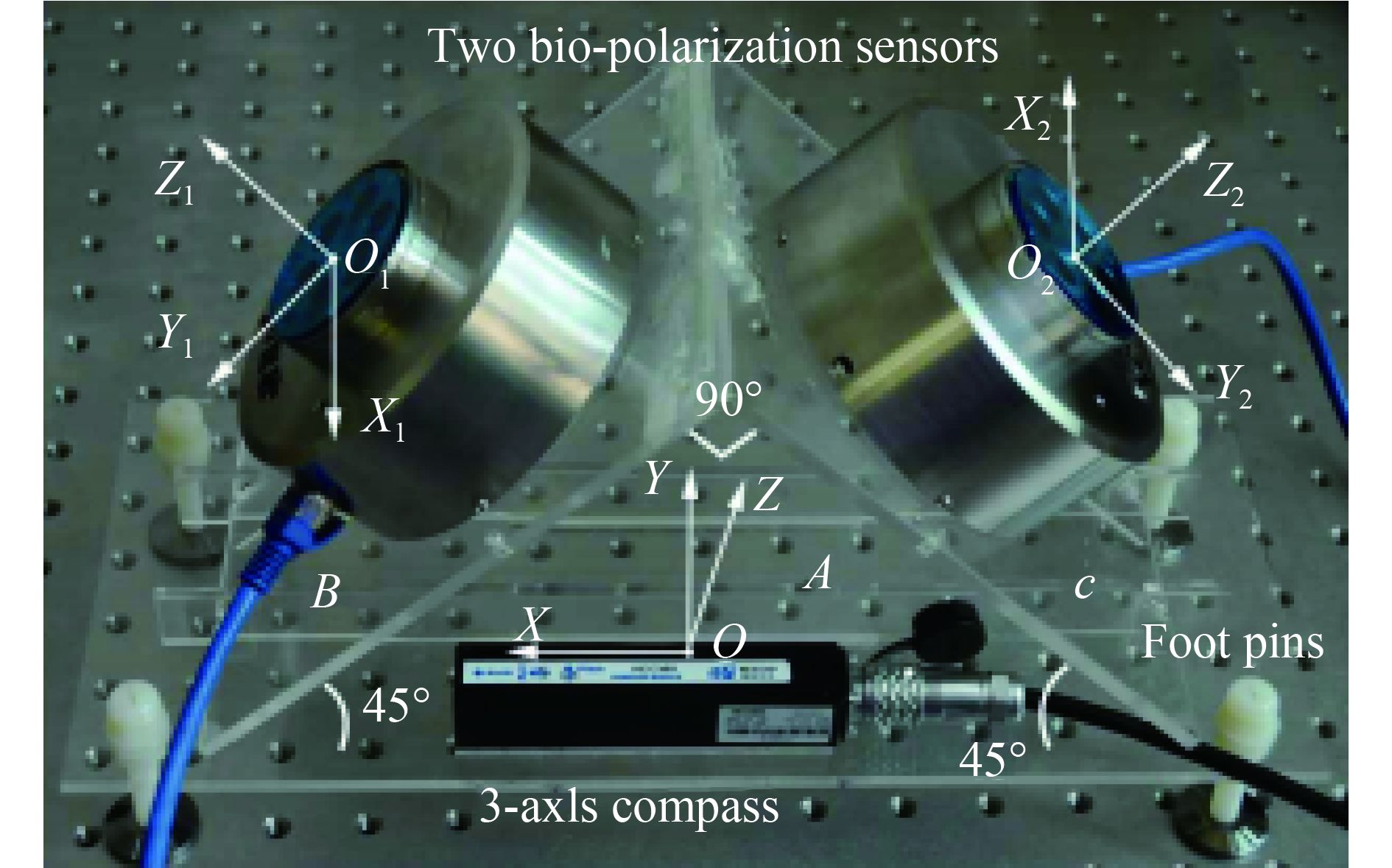
大连理工大学Wang等人(2015)提出了一种基于偏振光和地磁场的新型自主实时定位方法,通过融合两个不平行方向的偏振光传感器,利用磁性指南针,水平仪或姿态测量仪表,结合计算机提供UTC时间和地磁场分布的信息,得到样机位置的经纬度(图9)。
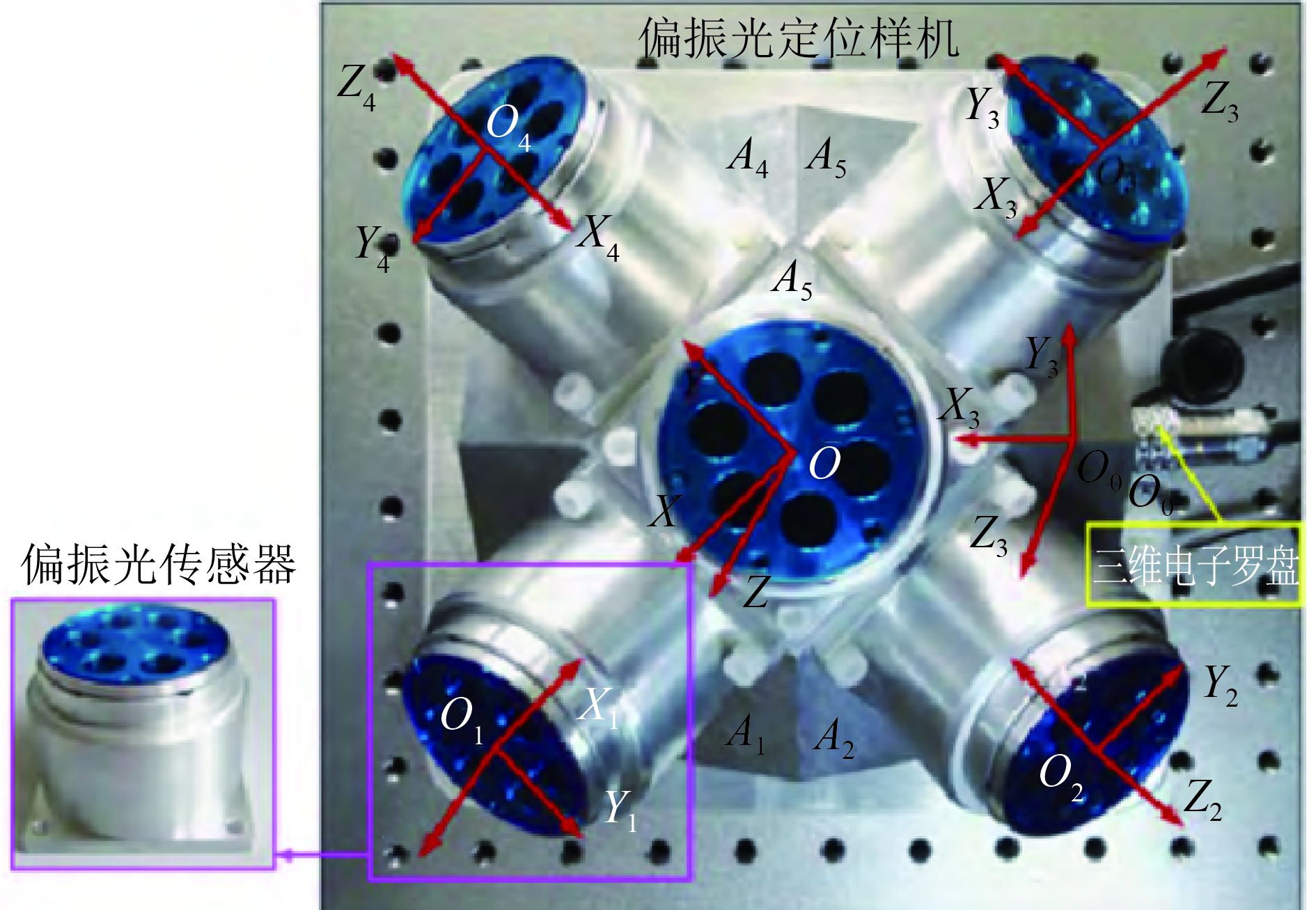
褚金奎等人(2017)利用这种方向融合的偏振光定位方法搭建了样机(图10)。通过对偏振光导航传感器进行多方向阵列分布,实时检测天空多个方向的偏振光信息,对多方向信息的优选和融合,可以得到更准确的太阳空间位置,实现实时定位。经度方向上的定位精度为±0.4°,纬度方向上为±1.2°。
此外,针对点源式偏振光导航传感器无法获得全天空偏振方位角信息的问题,李彬等人(2014)还研发了基于CMOS分焦平面的成像式偏振光导航传感器。
其他团队中,北京大学晏磊团队(2009)提出了一种利用天空偏振光分布确定仿生导航系统航向角的方法。通过数值分析的方法,确定了偏振模式图中太阳子午线的位置,并利用此方法实现导航。
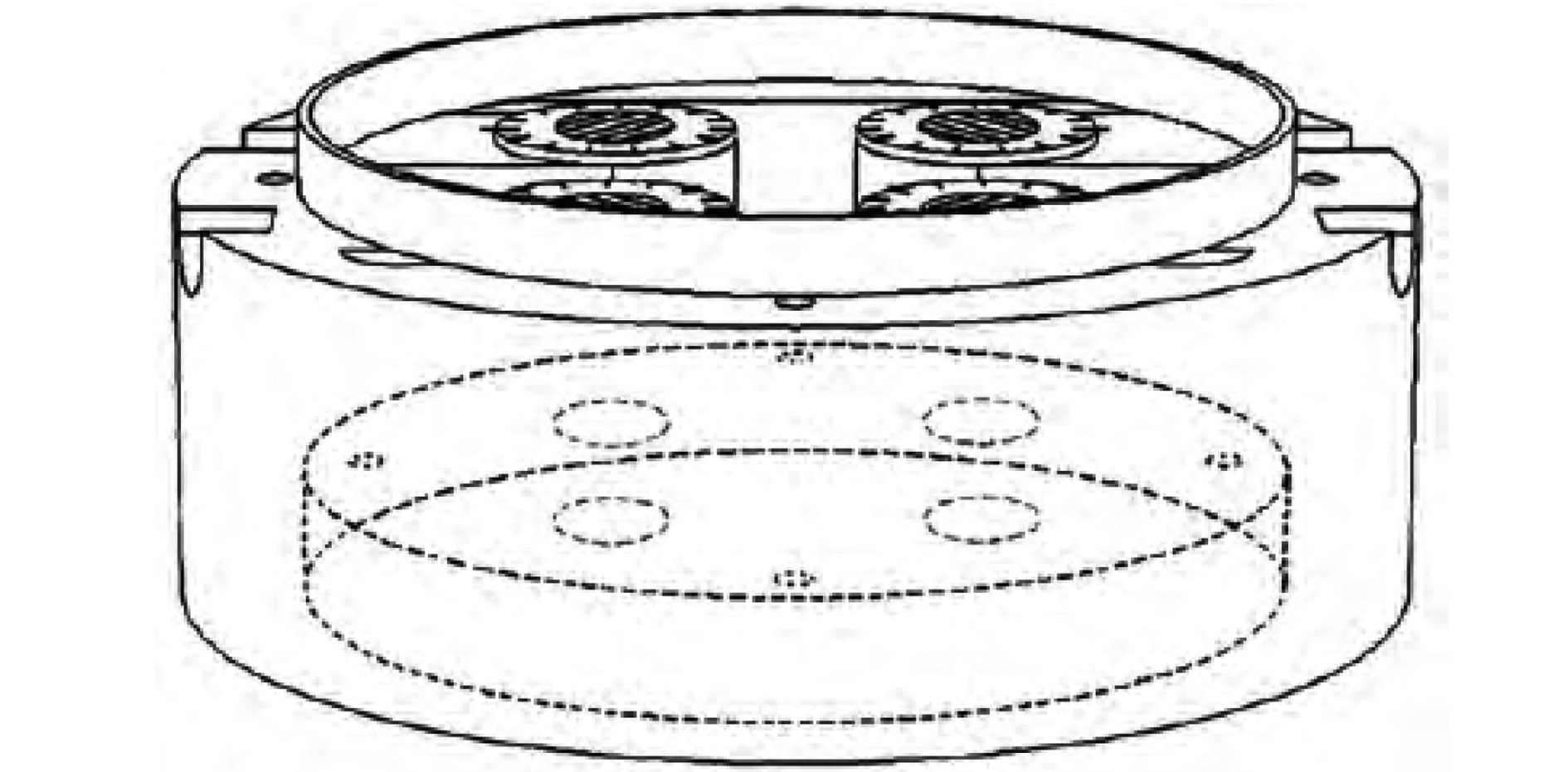
合肥工业大学的高隽团队研究了偏振信息处理方法和检测手段,田柳等人(2011)提出了一种利用大气偏振模式的对称性获取航向角的方法,通过对大气偏振模式图进行对称性检测,确定太阳子午线位置,解算航向角信息。范宁生等人(2011)开发了基于昆虫POL神经元的四通道点源式偏振光检测传感器样机(图11),实现对天空偏振信息的实时采集。
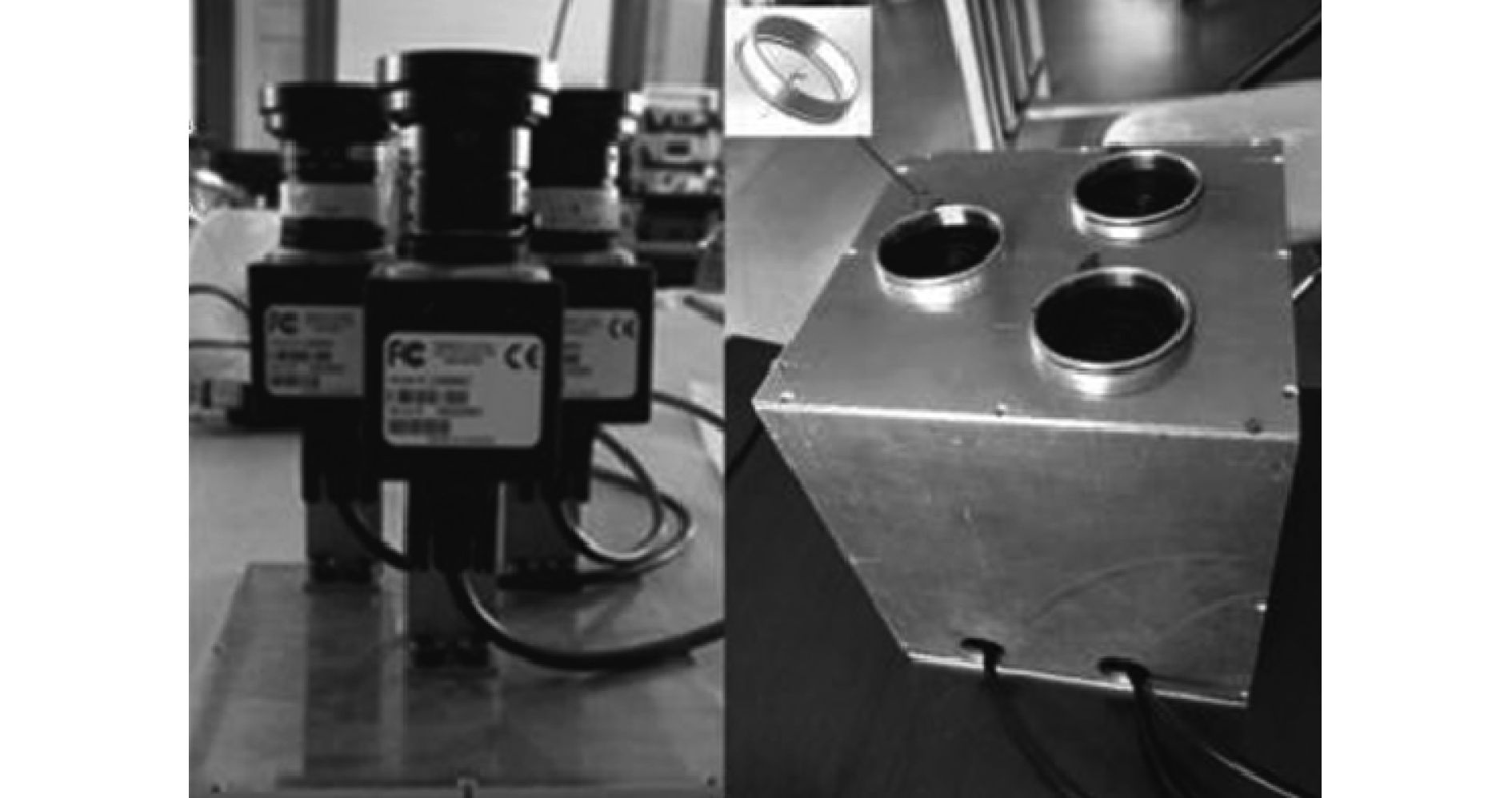
中北大学梁建琦等人(2017)设计了一种基于斯托克斯矢量测量偏振方位角的三通道成像式偏振光导航装置。如图12所示,利用3个CMOS采集不同偏振方向偏振片下的蓝色波段偏振光,并编写了成像测量软件,在上位机上实现了实时采集测量,最终的动态航向角误差在±1°左右。
此外,西北工业大学、国防科技大学、北京航空航天大学、中国科学技术大学、哈尔滨工业大学等单位也对偏振光导航传感器及其算法优化做了研究。
综上所述,目前传感器从采样机理上分为两大类:点源式和成像式。点源式传感器由偏振器、光电二极管及对数放大器等组成,具有实时性好、鲁棒性高的特点,可以测量天空中某一点的偏振度,但是容易受到天空环境的影响。成像式传感器由光学镜头、偏振器及图像传感器等组成,可以测量全天空的偏振信息,对于天空中部分区域的扰动具有抗干扰性,但是系统的实时性不好,图像处理过程复杂。
偏振信息处理算法可分为基于昆虫POL神经元偏振对抗算法,基于光学斯托克斯矢量的米勒矩阵三元解算法,以及基于偏振分布模型对称性的太阳方向矢量求解法。通过采用最小二乘法及神经网络补偿法,能够有效补偿传感器的原始误差,提高导航航向角的精度及稳定性。偏振光导航传感器的导航精度能够达到±0.1°,且成像式传感器的精度低于点源式,约为±1°。目前影响偏振光导航传感器精度的因素主要为偏振信息提取算法的适应性、偏振模型的真实性、准确性及集成器件的工艺精度。
4.3 组合导航应用
偏振导航传感器目前只能测量2维平面内的角度,而在实际的3维世界中,缺少维度的导航的应用意义不大,偏振光导航具有抗干扰、误差不随时间累积等优点,可将偏振光与惯性导航器件、GPS等进行组合,用以修正惯性器件的误差累积和GPS的短暂失效。
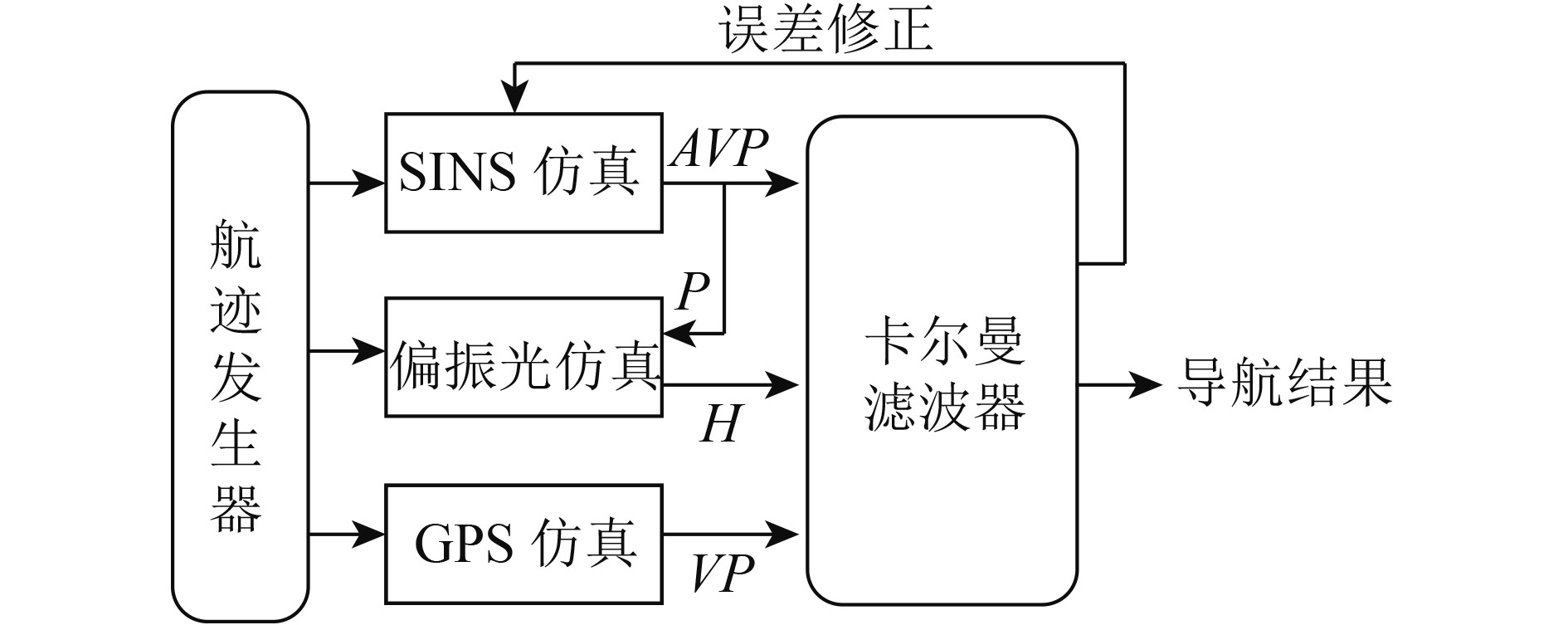
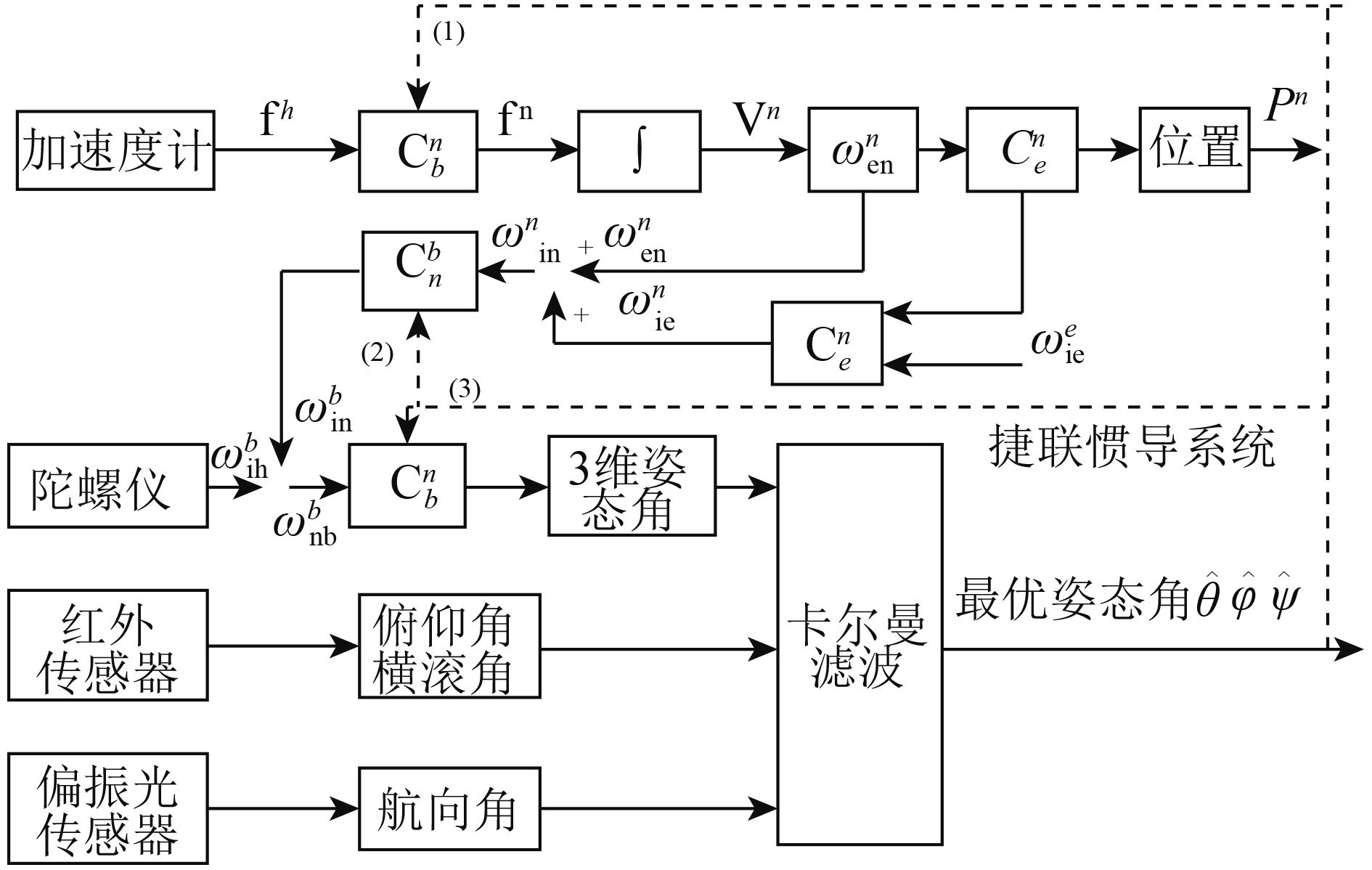
对组合导航的数值仿真方面,大连理工大学课题组(王体昌等,2008)设计了基于偏振光传感器、码盘和GPS的组合导航系统,其中软件设计中引入RT Linux操作系统,在多线程模式下实现了组合导航功能。哈尔滨工业大学刘佳琦(2010)搭建了三通道的偏振光测量平台,利用分布式卡尔曼滤波器融合偏振光和光流信息。东南大学祝燕华等人(2012)将偏振光与SINS、GPS等进行组合,系统结构如图13所示,通过仿真证明了偏振光组合导航能够有效提高系统导航精度。大连理工大学课题组支炜等人(2015)提出了一种偏振光及红外传感器辅助惯导定姿方法,利用偏振光传感器、红外传感器得到的机体的3维姿态角,建立了卡尔曼滤波模型,系统结构如图14所示;通过动态仿真证明偏振光、红外传感器的组合导航能够有效地修正惯性导航器件的姿态误差。此外,支炜等人(2015)提出了一种利用偏振光导航传感器对角速度MEMS陀螺随机漂移的矫正方法。
在偏振光地面组合导航实验方面,大连理工大学褚金奎等人(2011)提出了一种偏振光传感器与光电编码器组合导航的方法,并在移动机器人平台上进行传感器应用的室外实验,偏振光传感器提供方向信号,通过基于光电编码器的PID控制器控制移动机器人位置。实验结果表明(图15),利用偏振光传感器测量过程中无误差累积,能够有效地提高航位推算的精度,移动机器人的方向角度误差保持在5°以内。

5 结 论
通过对全天空偏振矢量场的定性分析,表明一定位置一定时刻天空中确切存在着稳定的偏振模式分布,本文总结了全天空偏振模式图规律和物理特性的研究进展,归纳了全天域、全天候偏振矢量场的测量技术。全天候、全气象区域内,不同条件下的偏振模式分布有着同性的规律,但彼此之间又有着特殊差异。为了得到矢量分布的特征规律和更准确的指导遥感、导航等技术应用的大气偏振模型,需要基于不同的机理进行建模和测试。
基于偏振矢量场的仿生偏振导航传感器具有完全自主、误差不随时间累积和实时性好等优点,精度可达到无漂移±0.1°,符合追求完全自主化、集成化并且实时性好的新型导航定位技术的科学理念,已成为仿生及导航研究领域的热点;但由于大气偏振模式图易受到大气成分、气溶胶粒子浓度和云雾的影响,偏振光导航传感器的室外适应性还有待提高,根据目前影响大气偏振模式图的物理因素,需要有针对性的选择传感器的透光波段,针对不同天气、不同时段建立相应的大气偏振模型,从而改善传感器的适应性、鲁棒性。人们对于复杂天气条件的大气偏振模式图与偏振光导航传感器的相关性还有待研究。
如何提高偏振光传感器组合导航的性能是今后要解决的重要问题,同时偏振光导航传感器的应用也证明了大气偏振矢量场的客观性、独特性、独立可重复性,为偏振遥感物理理论的提供了有效验证。
参考文献(References)
-
Barta A, Horváth G and Horváth Á. 2015. Testing a polarimetric cloud imager aboard research vessel Polarstern: comparison of color-based and polarimetric cloud detection algorithms . Applied Optics, 54 (5): 1065–1077. [DOI: 10.1364/AO.54.001065]
-
Brines M L and Gould J L. 1982. Skylight polarization patterns and animal orientation. Journal of Experimental Biology, 96 : 69–91.
-
Buras R and Mayer B. 2011. Efficient unbiased variance reduction techniques for Monte Carlo simulations of radiative transfer in cloudy atmospheres: the solution. Journal of Quantitative Spectroscopy and Radiative Transfer, 112 (3): 434–447. [DOI: 10.1016/j.jqsrt.2010.10.005]
-
Cao N N. 2008. Research on Polarized Charauteristis of Scattering Skylight for the Bionic Navigation. Dalian: Dalian Universlty of Technology (曹楠楠. 2008. 应用于仿生导航的天空散射光的偏振特性研究. 大连: 大连理工大学)
-
Chahl J and Mizutani A. 2012. Biomimetic attitude and orientation sensors. IEEE Sensors Journal, 12 (2): 289–297. [DOI: 10.1109/JSEN.2010.2078806]
-
Chu J K and Zhao K C. 2005. Study of angle measurement optoelectronic model on emulating polarization-sensitive compound eye of insect. Nanoelectronic Device and Technology, 42 (12): 541–545. [DOI: 10.13250/j.cnki.wndz.2005.12.002] ( 褚金奎, 赵开春. 2005. 仿昆虫复眼偏振敏感测角光电模型研究. 微纳电子技术, 42 (12): 541–545. [DOI: 10.13250/j.cnki.wndz.2005.12.002] )
-
Chu J K, Chen W J, Wang H Q and Rong C G. 2011. Mobile robot navigation tests with polarization sensors. Optics and Precision Engineering, 19 (10): 2419–2426. [DOI: 10.3788/OPE.20111910.2419] ( 褚金奎, 陈文静, 王洪青, 戎成功. 2011. 基于偏振光传感器的移动机器人导航实验. 光学精密工程, 19 (10): 2419–2426. [DOI: 10.3788/OPE.20111910.2419] )
-
Chu J K, Wang H Q, Rong C G and Chen W J. 2011. The performance test of a novel polarization sensor for navigation system. Journal of Astronautics, 32 (3): 489–494. [DOI: 10.3873/j.issn.1000-1328.2011.03.006] ( 褚金奎, 王洪青, 戎成功, 陈文静. 2011. 基于偏振光传感器的导航系统实验测试. 宇航学报, 32 (3): 489–494. [DOI: 10.3873/j.issn.1000-1328.2011.03.006] )
-
Chu J K, Wang Z W, Zhang Y J, Liu Z, Wang Y L. 2013. Integrated blue-sensitive polarization-dependent photo detector. Journal of Micro/Nanolithography Mems & Moems, 12 (3): 033005 [DOI: 10.1117/1.JMM.12.3.033005]
-
Chu J K, Zhang H X, Wang Y L and Shi C. 2017. Design and construction of autonomous real-time position prototype based on multi-polarized skylight. Optics and Precision Engineering, 25 (2): 312–318. [DOI: 10.3788/OPE.20172402.0312] ( 褚金奎, 张慧霞, 王寅龙, 时超. 2017. 多方向偏振光实时定位样机的设计与搭建. 光学精密工程, 25 (2): 312–318. [DOI: 10.3788/OPE.20172402.0312] )
-
Cui Y, Cao N N, Chu J K, Zhao K C and Wang T C. 2009. Design of skylight polarization measurement system. Optics and Precision Engineering, 17 (6): 1431–1435. [DOI: 10.3321/j.issn:1004-924X.2009.06.040]
-
Cui Y, Chen X L, Chu J K, Chen C and Li C M. 2014. Study on polarization pattern of full moonlight in clear sky. Acta Optica Sinica, 34 (10): 1012002 [DOI: 10.3788/AOS201434.1012002] ( 崔岩, 陈小龙, 褚金奎, 陈辰, 李晨牧. 2014. 晴朗天气下满月偏振模式的研究. 光学学报, 34 (10): 1012002 [DOI: 10.3788/AOS201434.1012002] )
-
Cui Y, Gao Q S, Chu J K and Chen C. 2013. Influence of sunlight and moonlight on polarization patterns during twilight. Optics and Precision Engineering, 21 (1): 34–39. [DOI: 10.3788/OPE.20132101.0034] ( 崔岩, 高启升, 褚金奎, 陈辰. 2013. 太阳光与月光对曙暮光偏振模式的影响. 光学精密工程, 21 (1): 34–39. [DOI: 10.3788/OPE.20132101.0034] )
-
Cui Y, Zhao J Y, Guan L, Chu J K, Zhang X G and Liu H. 2017. Study on simulation and measurement of skylight polarization pattern on the yellow sea. Acta Optica Sinica, 37 (10): 1001004 [DOI: 10.3788/aos201737.1001004] ( 崔岩, 赵金勇, 关乐, 褚金奎, 张西光, 刘慧. 2017. 黄海海域天空光偏振分布仿真与测试研究. 光学学报, 37 (10): 1001004 [DOI: 10.3788/aos201737.1001004] )
-
Dacke M, Byrne M J, Scholtz C H and Warrant E J. 2004. Lunar orientation in a beetle. Proceedings of the Royal Society B: Biological Sciences, 271 (1537): 361–365. [DOI: 10.1098/rspb.2003.2594]
-
Dacke M, Nilsson D E, Scholtz C H, Byrne M and Warrant E J. 2003. Animal behaviour: insect orientation to polarized moonlight. Nature, 424 (6944): 33 [DOI: 10.1038/424033a]
-
Fan N S, Zhang X D, Fan Z G and Wang X. 2011. Study on polarized light navigation sensor of imitating biological POL neurons. Transducer and Microsystem Technologies, 30 (9): 53–56. [DOI: 10.13873/j.1000-97872011.09.034] ( 范宁生, 张旭东, 范之国, 王昕. 2011. 仿生POL神经元的偏振光导航传感器研究. 传感器与微系统, 30 (9): 53–56. [DOI: 10.13873/j.1000-97872011.09.034] )
-
Gál J, Horváth G, Barta A and Wehner R. 2001. Polarization of the moonlit clear night sky measured by full-sky imaging polarimetry at full moon: comparison of the polarization of moonlit and sunlit skies. Journal of Geophysical Research: Atmospheres, 106 (D19): 22647–22653. [DOI: 10.1029/2000JD000085]
-
Hegedüs R, Åkesson S, Wehner R and Horváth G. 2007. Could vikings have navigated under foggy and cloudy conditions by skylight polarization? On the Atmospheric optical prerequisites of polarimetric viking navigation under foggy and cloudy skies. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 463 (2080): 1081–1095. [DOI: 10.1098/rspa.2007.1811]
-
Horváth G and Wehner R. 1999. Skylight polarization as perceived by desert ants and measured by video polarimetry. Journal of Comparative Physiology A, 184 (1): 1–7. [DOI: 10.1007/s003590050300]
-
Horváth G, Barta A, Gál J, Suhai B and Haiman O. 2002. Ground-based full-sky inaging polarimetry of rapidly changing skies and its use for polarimetric colud detection. Appied Optics, 41 (3): 543–559. [DOI: 10.1364/AO.41.000543]
-
Huang X F, Bu Y and Wang X Z. 2010. Skylight polarization patterns based on mie theory for scattering. Chinese Journal of Lasers, 37 (12): 3002–3006. [DOI: 10.3788/CJL20103712.3002] ( 黄旭锋, 步扬, 王向朝. 2010. 基于米氏散射理论的太阳光散射偏振特性. 中国激光, 37 (12): 3002–3006. [DOI: 10.3788/CJL20103712.3002] )
-
Jensen H W, Durand F, Dorsey J, Stark M M, Shirley P and Premože S. 2001. A physically-based night sky model//Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques. New York, NY, USA: ACM: 399–408 [DOI: 10.1145/383259.383306]
-
Kreuter A, Emde C, Blumthaler M. 2010. Measuring the influence of aerosols and albedo on sky polarization. Atmospheric Research, 98 (2-4): 363 [DOI: 10.1016/j.atmosres.2010.07.010]
-
Lambrinos D, Maris M, Kobayashi H, Pfeifer R, Maris M, Labhart T and Wehner R. 1997. An autonomous agent navigating with a polarized light compass. Adaptive Behavior, 6 (1): 131–161. [DOI: 10.1177/105971239700600104]
-
Li B, Guan L, Liu Q and Chu J K. 2014. A novel imaging bionic polarization navigation sensing device based on skylight. Transducer and Microsystem Technologies, 33 (8): 69–72. [DOI: 10.13873/j.1000-9787(2014)08-0069-04] ( 李彬, 关乐, 刘琦, 褚金奎. 2014. 一种基于天空光的新型成像式仿生偏振导航传感装置. 传感器与微系统, 33 (8): 69–72. [DOI: 10.13873/j.1000-9787(2014)08-0069-04] )
-
Liang J Q, Yan H and Tang J. 2017. Design and application of three channel polarization imaging navigation sensor. Science Technology and Engineering, 17 (11): 52–56. [DOI: 10.3969/j.issn.1671-1815.2017.11.008] ( 梁建琦, 闫皓, 唐军. 2017. 三通道偏振成像导航传感器的设计与应用. 科学技术与工程, 17 (11): 52–56. [DOI: 10.3969/j.issn.1671-1815.2017.11.008] )
-
Liu J Q. 2010. Polarized-Light-Aided Attitude Determination in Integrated Navigation Systems. Harbin: Harbin Institute of Technology (刘佳琦. 2010. 偏振光辅助定姿在组合导航中的应用. 哈尔滨: 哈尔滨工业大学)
-
Liu L B, Jin R C, Zhao K C and Yao H Y. 2006. Study of the bionic test system for polarized light based on ARM. Chinese Journal of Sensors and Actuators, 19 (5): 1788–1791. [DOI: 10.3969/j.issn.1004-1699.2006.05.127] ( 刘利兵, 金仁成, 赵开春, 姚弘轶. 2006. 一种基于ARM的仿生偏振光测试系统的研究. 传感技术学报, 19 (5): 1788–1791. [DOI: 10.3969/j.issn.1004-1699.2006.05.127] )
-
Liu Q, Chu J K, Wang J and Guan L. 2014. Research and simulation analysis of atmospheric polarization properties under water cloud condition. Acta Optica Sinica, 34 (3): 301004 ( 刘琦, 褚金奎, 王兢, 关乐. 2014. 水云条件下大气偏振特性研究及其模拟分析. 光学学报, 34 (3): 301004 )
-
Lu H, Zhao K C, Ma Q and You Z. 2014. Design and implementation of detection system for skylight polarized pattern using continuously spinning polarization analyzer. Journal of Astronautics, 35 (9): 1087–1094. [DOI: 10.3873/j.issn.1000-1328.2014.09.015] ( 卢皓, 赵开春, 马强, 尤政. 2014. 采用连续旋转检偏器的天空偏振光探测装置设计与实现. 宇航学报, 35 (9): 1087–1094. [DOI: 10.3873/j.issn.1000-1328.2014.09.015] )
-
Mie G. 1908. Beiträge zur Optik trüber Medien, speziell kolloidaler Metallosungen. Annalen der Physik, 330 (3): 376–445. [DOI: 10.1002/andp.19083300302]
-
Rayleigh L. 1871. On the light from the sky, its polarization and colour. Philosophical Magazine, 61 (4): 107–279.
-
Schmolke A and Mallot H A. 2002. Polarization compass for robot navigation//Proceedings of Fifth German Workshop on Artificial Life. Lubeck: IOS Press, 163–167.
-
Sun X B, Hong J and Qiao Y L. 2005. Investigation of measurements of polarized properties of atmospheric scattering radiation. Chinese Journal of Quantum Electronics, 22 (1): 111–115. [DOI: 10.3969/j.issn.1007-5461.2005.01.022] ( 孙晓兵, 洪津, 乔延利. 2005. 大气散射辐射偏振特性测量研究. 量子电子学报, 22 (1): 111–115. [DOI: 10.3969/j.issn.1007-5461.2005.01.022] )
-
Tan B. 2013. Study on Characteristics of Polarized Skylight Based on Mie Scattering. Dalian: Dalian University of technology (覃彬. 基于Mie散射天空偏振光特性的研究. 大连: 大连理工大学)
-
Tian L, Gao J, Fan Z G, Wang X. 2011. The method of the navigation direction angle acquisition based on the symmetry detection of the atmosphere polarization mode. Signal Processing, 27 (11): 1702–1705. [DOI: 10.3969/j.issn.1003-0530.2011.11.013] ( 田柳, 高隽, 范之国, 王昕. 2011. 基于大气偏振模式对称性检测的航向角获取方法. 信号处理, 27 (11): 1702–1705. [DOI: 10.3969/j.issn.1003-0530.2011.11.013] )
-
Ugolnikov O S, Postylyakov O V and Maslov I A. 2004. Effects of multiple scattering and atmospheric aerosol on the polarization of the twilight sky. Journal of Quantitative Spectroscopy and Radiative Transfer, 88 (1/3): 233–241. [DOI: 10.1016/j.jqsrt.2003.12.033]
-
Voss K J and Liu Y. 1997. Polarized radiance distribution measurements of skylight. I. System description and characterization. Applied Optics, 36 (24): 6083–6094. [DOI: 10.1364/AO.36.006083]
-
Wang T C, Chu J K, Zhao K C and Zhang Q. 2008. Design of a new integrated navigation system based on polarized light sensor. Journal of Electronic Measurement and Instrument, 22 (S2): 287–292. [DOI: 10.13382/j.jemi.2008.s2.079] ( 王体昌, 褚金奎, 赵开春, 张强. 2008. 基于偏振光传感器的组合导航系统设计. 电子测量与仪器学报, 22 (S2): 287–292. [DOI: 10.13382/j.jemi.2008.s2.079] )
-
Wang W, Chu J K, Cui Y, Zhi W and Chen C. 2013. Modeling of atmospheric polarization pattern based on vector radiative transfer. Chinese Journal of Lasers, 40 (5): 513001 ( 王威, 褚金奎, 崔岩, 支炜, 陈辰. 2013. 基于矢量辐射传输的大气偏振建模. 中国激光, 40 (5): 513001 )
-
Wang Z Q, Zhang X D, Jin H H and Fan Z G. 2014. All sky turbid atmospheric polarization pattern modeling based on monte carlo method. Chinese Journal of Lasers, 41 (10): 1013001 ( 王子谦, 张旭东, 金海红, 范之国. 2014. 基于Monte Carlo方法的混浊大气偏振模式全天域建模. 中国激光, 41 (10): 1013001 )
-
Wang Y L, Chu J K, Zhang R, Wang, L, Wang Z W. 2015. A novel autonomous real-time position method based on polarized light and geomagnetic field. Scientific Reports, 5 : 9725 [DOI: 10.1038/srep09725]
-
Wu L H, Gao J, Fan Z G and He J J. 2011. Scattering of particles in the atmosphere and their influence on celestial polarization patterns. Acta Optica Sinica, 31 (7): 701005 ( 吴良海, 高隽, 范之国, 何均均. 2011. 大气粒子散射特性及其对空间偏振分布的影响. 光学学报, 31 (7): 701005 )
-
Yan L, Guan G X, Chen J B, Wu T X and Shao X. 2009. The bionic orientation mechanism in the skylight polarization pattern. Acta Scientiarum Naturalium Universitatis Pekinensis, 45 (4): 616–620. [DOI: 10.13209/j.0479-8023.2009.092] ( 晏磊, 关桂霞, 陈家斌, 吴太夏, 邵轩. 2009. 基于天空偏振光分布模式的仿生导航定向机理初探. 北京大学学报(自然科学版), 45 (4): 616–620. [DOI: 10.13209/j.0479-8023.2009.092] )
-
Zhang X D, Lin J J, Xie Z, Ji Song, Wu K W and Gao J. 2010. Modeling of skylight polarization pattern based on electric vector. Acta Electronica Sinica, 38 (12): 2745–2750. ( 张旭东, 林金金, 谢昭, 纪松, 吴克伟, 高隽. 2010. 基于电矢量描述的大气偏振建模. 电子学报, 38 (12): 2745–2750. )
-
Zhao K C, Chu J K, Yao H Y, Zhang Q and Wang T S. 2007. Simulation and prediction for Rayleigh skylight polarization distribution. Journal of Sichuan University (Engineering Science Edition), 39 (S1): 287–291. [DOI: 10.15961/j.jsuese.2007.s1.003] ( 赵开春, 褚金奎, 姚弘轶, 张强, 王体昌. 2007. Rayleigh大气天空光偏振分布仿真与预测. 四川大学学报(工程科学版), 39 (S1): 287–291. [DOI: 10.15961/j.jsuese.2007.s1.003] )
-
Zhi W, Chu J K and Guan L. 2015. Attitude determination aided by polarized-light and infrared sensors. Journal of Chinese Inertial Technology, 23 (4): 528–532. [DOI: 10.13695/j.cnki.12-1222/o3.2015.04.020] ( 支炜, 褚金奎, 关乐. 2015. 基于偏振光及红外传感器的辅助定姿方法. 中国惯性技术学报, 23 (4): 528–532. [DOI: 10.13695/j.cnki.12-1222/o3.2015.04.020] )
-
Zhi W, Chu J K, Wang Y L. 2015. Design of heading angle measurement system based on polarized light and MEMS gyroscope. Transducer and Microsystem Technologies, 34 (01): 104–106. [DOI: 10.13873/J.1000-9787(2015)01-0104-03] ( 支炜,褚金奎,王寅龙. 2015. 基于偏振光与MEMS陀螺的航向角测量系统设计. 传感器与微系统, 34 (01): 104–106. [DOI: 10.13873/J.1000-9787(2015)01-0104-03] )
-
Zhu Y H, Cai T J, Li C and Xu Z Y. 2012. Integrated navigation method aided by skylight polarization. Journal of Chinese Inertial Technology, 20 (6): 674–677. [DOI: 10.13695/j.cnki.12-1222/o3.2012.06.013] ( 祝燕华, 蔡体菁, 李春, 徐泽杨. 2012. 天空偏振光辅助的组合导航方法. 中国惯性技术学报, 20 (6): 674–677. [DOI: 10.13695/j.cnki.12-1222/o3.2012.06.013] )


