
|
收稿日期: 2017-07-24
基金项目: 国家自然科学基金(编号:41664002,41704027);广西自然科学基金(编号:2015GXNSFAA139230,2017GXNSFDA198016,2017GXNSFBA198139);广西空间信息与测绘重点实验室基金(编号:16-380-25-05,15-140-07-03,16-380-25-01,16-380-25-27);广西“八桂学者”岗位专项
第一作者简介: 周威,1992年生,男,硕士研究生,研究方向为GNSS反射信号的技术及应用。E-mail:boy123455@126.com
通信作者简介: 刘立龙,1974年生,男,教授,研究方向为GNSS技术的理论和应用。E-mail:hn_liulilong@163.com
中图分类号: TP722.6
文献标识码: A
|
摘要
利用GNSS-MR(Global Navigation Satellite System Multipath Reflectometry)技术反演积雪深度是近年来一种新兴的卫星遥感技术。目前大多数研究仅使用GPS(Global Position System)数据限制了该技术的发展,为了扩展GNSS-MR算法的应用,介绍了基于GNSS-MR算法的雪深反演模型。首先,通过多项式拟合分解GLONASS观测数据获取高精度的信噪比残差序列;然后,利用Lomb-Scargle谱分析法对其进行频谱分析可解算雪深值。选取IGS中心的YEL2站2015年11月到2016年6月共243天的GLONASS卫星L1波段反射信号的SNR数据进行实例分析,并以美国国家气象数据中心提供的加拿大Y-H (Yellowknife Henderson)气象站的实测雪深数据为真值,将反演雪深与实测雪深进行对比验证。所得实验结果如下:(1) 与GPS卫星的反演值相比,基于GLONASS-MR (GLONASS Multipath Reflectometry)技术反演积雪深度的精度同样能达到厘米级,RMSE仅3.3 cm,反演值与实测值的空间分布趋势一致且相关性较强,其相关系数R2高达0.969;(2) 不同的积雪深度对信噪比的振幅频率与垂直反射距离具有直接影响;(3) 对同一卫星而言,信噪比的频谱振幅强度峰值与其对应的反演值存在线性相关;(4) 在相同条件下,采用多颗GLONASS卫星数据比单颗GLONASS卫星数据反演雪深的效果明显更优。基于反演的高时间分辨率产品,分析该地区雪深日变化的情况,实验结果表明基于陆基CORS站的GLONASS-MR技术在用于实时、连续的雪深变化监测方面具有良好的潜力和可行性。
关键词
GNSS-MR, 格洛纳斯卫星系统(GLONASS), 信噪比, 雪深反演, Lomb-Scargle谱分析
Abstract
Snow Depth (SD) measurements are important to hydrology, climatology, and agriculture. Global navigation satellite system multipath reflectometry (GNSS-MR) technology is a relatively new and powerful method for sensing SD. Thus far, many algorithms have been proposed to detect SD from the Signal-to-Noise Ratio (SNR) data of different satellites’ reflectometry signals. However, the relevant studies based on GLONASS satellites have less consideration for the development of existing GNSS-MR algorithms. This study aims to verify and analyze the suitability and reliability of applying GNSS-MR model for SD detection from GLONASS data. Theoretical analysis and formula derivation are conducted to systematically and quantitatively determine the SD detection. By analyzing the characteristics of the ground-based GNSS SNR data caused by multipath, this study introduces the detection model and the basic theory of GNSS-R technology based on SNR data to detect SD data. The SNR data of GLONASS L1 reflectometry signals can be obtained from the CORS (Continuously Oporating Reference Stations) network provided by the International GNSS Service (IGS). The residual sequence of this SNR serves as key knowledge for the SD detection in GNSS-R model. The SD is estimated through the spectral analysis using a Lomb-Scargle algorithm. To verify the above theory, the GLONASS-MR model is used to detect SD over the Yellowknife Henderson area in Canada. The observed period is from November 2015 to June 2016, 243 days in total. Then, the GLONASS products are compared with in situ measurements of the National Climate Data Center. Tesults show the following: (1) The accuracy of the detected SD based on GLONASS-MR can reach centimeter level, and the RMSE is 3.3 cm. The detected results likewise reveal good spatial coincidence, with a correlation coefficient of 0.969. (2) The different snow depths can directly affect the amplitude frequency of GLONASS SNR data and the vertical reflection distance. (3) For the same satellite, a linear relation is discovered between the peak values of the amplitude frequency and the detected SD. (4) Under the same conditions, SD detected using more GLONASS satellites can have less bias than that from a GLONASS satellite. This study aims to add new SNR data to the GNSS-MR algorithm to improve SD detection when other satellites’ data cannot be obtained. Validation using both simulated SD data and in situ measurements indicates that the proposed method is effective and can be used for real-time and continuous SD monitoring. Therefore, this study provides references for the future development of GNSS-R technology in China.
Key words
GNSS-MR, GLONASS, SNR, snow depth detection, Lomb-Scargle
1 引 言
在全球气候循环过程中,积雪是关键的淡水存储方式,可通过一系列交互反馈机制来影响气候(Solomon 等,2007)。探测大范围雪深变化对海平面升高及水循环等研究具有重要意义,但是当前的测量技术均存在各自的缺陷。GNSS (Global Navigation Satellite System)技术的不断发展促使GNSS-MR (Global Navigation Satellite System Multipath Reflectometry)技术在海面高度(万玮 等,2016)、海面风场(周晓中和邵连军,2012)、土壤湿度(万玮 等,2015;王迎强 等,2015)等方面被广泛应用,并获得了进一步推广。由于积雪对微波具有高反射率的特性,基于现已建成的全球定位系统反射信号的GPS-R (Global Position System Reflectometry)技术监测积雪的模型已被成功开发(金双根 等,2010,2011;钱晓东 等,2016)。与传统的监测技术比,GNSS-MR技术具有高时空和大范围的特征。基于此技术的相关研究,国内外已取得一些基础成果。Comp和Axelrad (1998)提出了基于SNR (Signal-to-Noise Ratio)数据校正载波相位获取单一观测量并证明了不同SNR的频率和振幅特性如何构建模型。Bilich等人(2008)提出改进模型中反射信号的频率和振幅来建立并确定单一反射分量的SNR与多路径误差之间的映射关系。Larson等人(2008)研究土壤水分时提出了利用现有CORS网络的GPS多路径反射信号的SNR数据计算反射点间的位置变化来实现精确土壤湿度测量的方法。Larson等人(2009)接着证明了利用大地测量型GPS接收机接收数据并采用该方法同样能适用于雪深探测。Yu等人(2015)提出基于无几何距离的线性组合观测量L4和三频SNR组合观测量的算法并分别进行了相关的雪深试验;Ozeki和Heki (2012)针对GPS-R技术的反射信号SNR数据不足的缺陷,提出基于GPS信号中无几何距离的线性组合观测值L4探测雪深的算法;Larson和Small (2016)开发性地使用了以较早的GPS L1 (1.5 GHz) 波段反射信号的SNR数据为中心的算法来探测23个站点5年的雪深数据,获得了较好的雪深结果。
目前,GNSS-MR技术已取得了一些研究成果,但仍有大量难题亟待解决。国内的北斗卫星系统还处于建设阶段,卫星数量较少且无法覆盖全球地区,只能适用于国内及其周边区域。而GPS和GLONASS卫星系统均可克服上述的限制条件,由于GPS卫星系统建设的最为成熟和完善,因而绝大多数的GNSS-MR技术反演雪深的研究集中于GPS卫星L载波。但是,仅仅采用单一的卫星数据不仅会导致反演雪深精度较差,而且数据来源也受到了极大的观测条件限制。因此,为进一步地拓展GNSS-MR技术的数据源及为今后的多源系统联合反演雪深打下基础,本文将探索采用IGS中心提供的GLONASS卫星L1波段反射信号的SNR数据和美国国家气象数据中心提供的加拿大Y-H气象监测站的实测雪深数据,对基于GLONASS-MR技术在某固定区域内探测雪深的可靠性和精确度等问题进行相关研究分析,以期能达到对GPS-MR技术的补充和加强,促进GNSS-MR技术在雪深探测方面的发展。
2 GLONASS-MR的基本原理
多路径影响与卫星相对接收机天线相位中心的空间关系以及接收机周围地表物质的环境有关(赵润和赵治华,2009)。GNSS接收机的接收信号主要包括直射信号和经地表介质反射的信号。由于受地表特殊介质(如海面、土壤、雪层等)影响较大,反射信号的相位和振幅特性发生变化,通过测量其特性即可得地表表征信息(万玮 等,2012)。
2.1 载波相位测量中的多路径信号
已知直射信号和经物体反射的信号同时接收并干涉产生一种复合信号。此复合信号Sc可用数学式表示为(袁林果 等,2004)
| $S_{\rm{c}} = d(t)c(t)A\sum\limits_{i = 0}^n {{\alpha _i}\cos ({\omega _0}t + {\Delta _i})} $ | (1) |
式中,
| $\begin{array}{c}{S_ {\rm{d}}} = A\sin ({\omega _0}t)\\ {S_ {\rm{r}}} = \displaystyle\sum\limits_{i = 1}^n {{\alpha _i}A\sin ({\omega _0}t + {\Delta _i})} \end{array}$ | (2) |
多路径误差主要由近距离的物体反射所导致。在多路径效应中,反射体到接收机天线的距离、多路径信号的相位偏移量以及信号入射角的关系式为
| ${\varDelta _1} = \frac{{2h}}{{\textit{λ}} }\sin \theta $ | (3) |
式中,
2.2 GLONASS/GNSS多路径与信噪比的关系
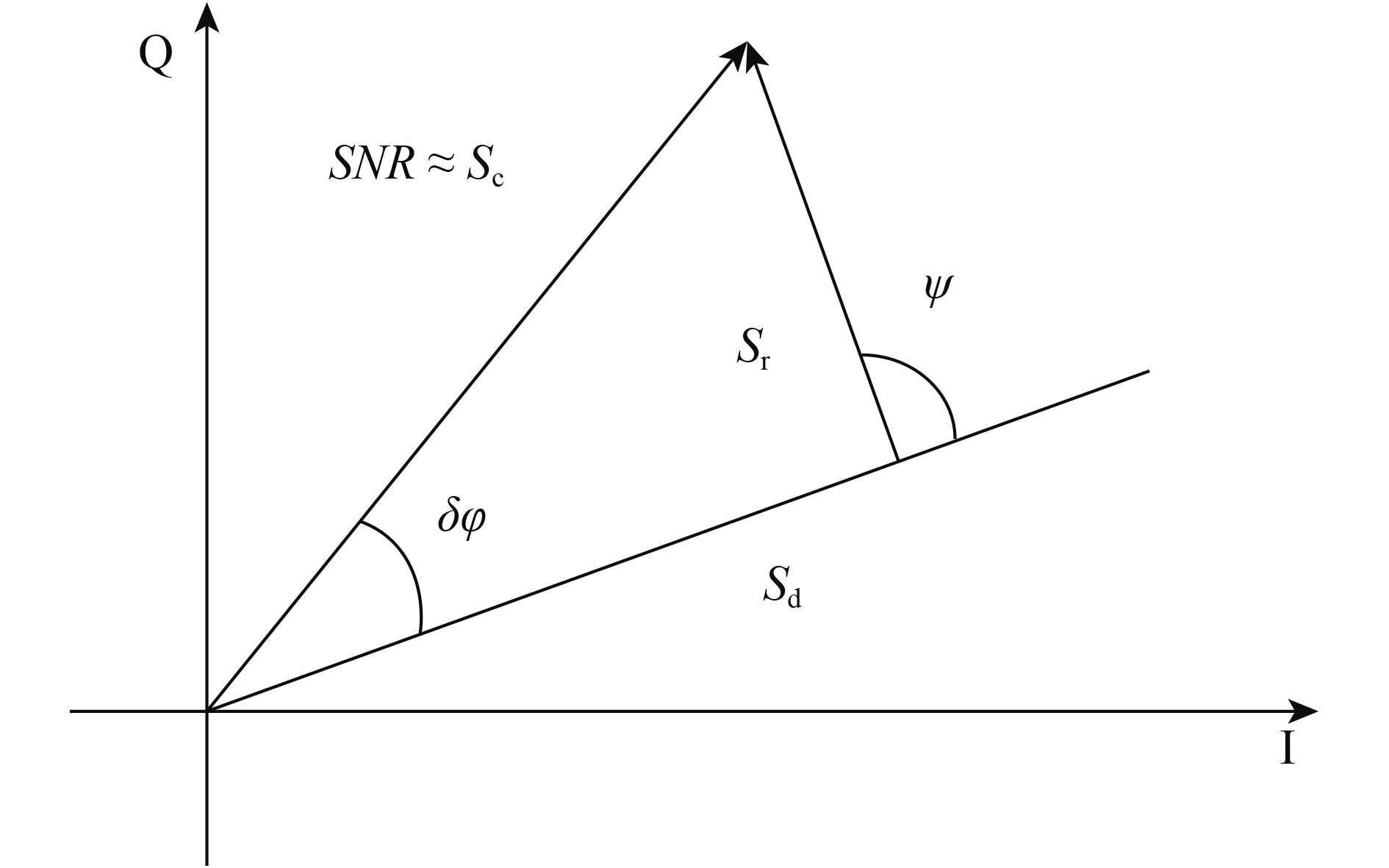
图1描述了载波相位多路径误差
信噪比(SNR)指接收的载波信号功率与噪声功率的比值,其结构如图1所示,单位:dB/Hz。其受到的主要影响因素是天线增益、接收机相关器的状态和多路径效应,数学表达式为
| $SN{R^2} \approx S_{\rm{c}}^2 = S_ {\rm{d}}^2 + S_ {\rm{r}}^2 + 2{S_ {\rm{d}}}{S_ {\rm{r}}}\cos \theta $ | (4) |
一般来说,普通大地测量型GNSS接收机为了减弱地表反射导致的多路径误差,应满足

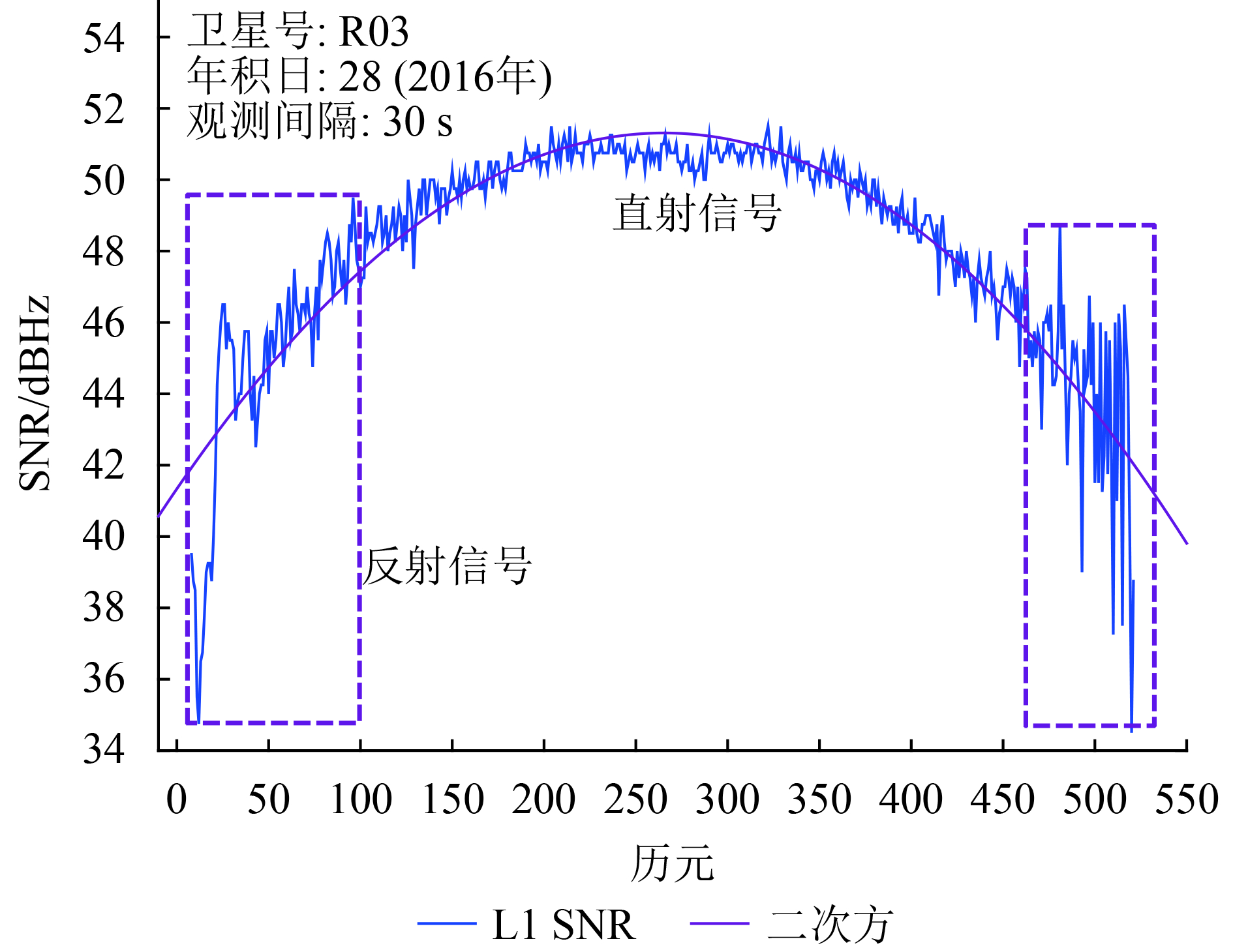
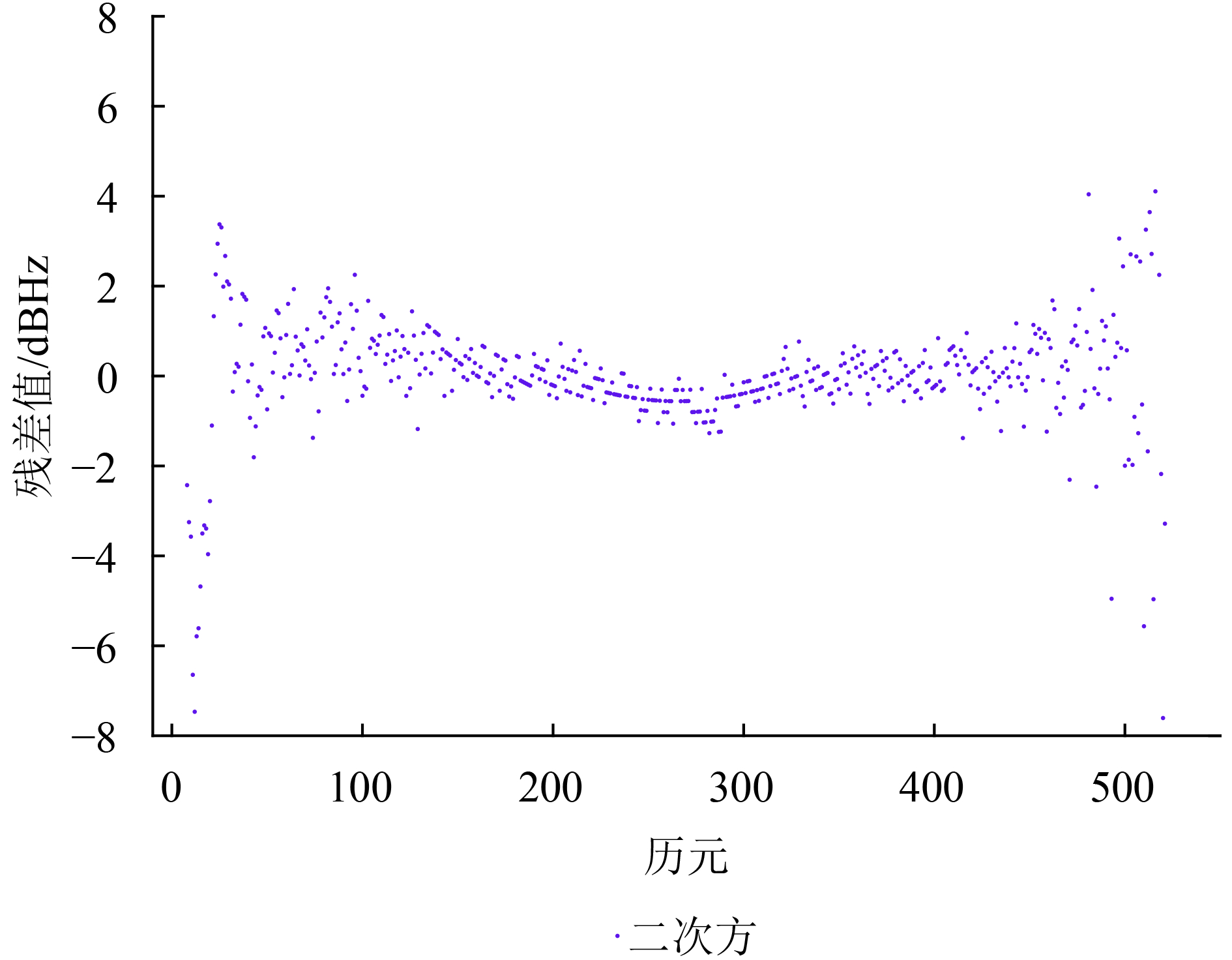
由图2知,L1波段反射信号的SNR数据的整体趋势项呈抛物线,中间段的SNR数据较平稳且残差值较小,由于接收到高度角较大的卫星信号,受多路径影响较少。两端的SNR数据波动大则是在低高度角时受较大的多路径影响,反射信号中包含了众多地表信息,由此造成信号的相位与振幅发生不稳定现象。图3为图2中GLONASS卫星的SNR数据的残差散点图。由图3可知,大部分SNR观测值的残差均落在0值附近,存在随机波动但幅度较小,整体趋势呈带状。在开始和结束两段中,残差波动幅度急剧加大,由此判定存在异方差现象,可采用非线性插值的方法拟合。结合图2和图3,本文采用二次多项式插值拟合法去除反射信号的整体趋势项。
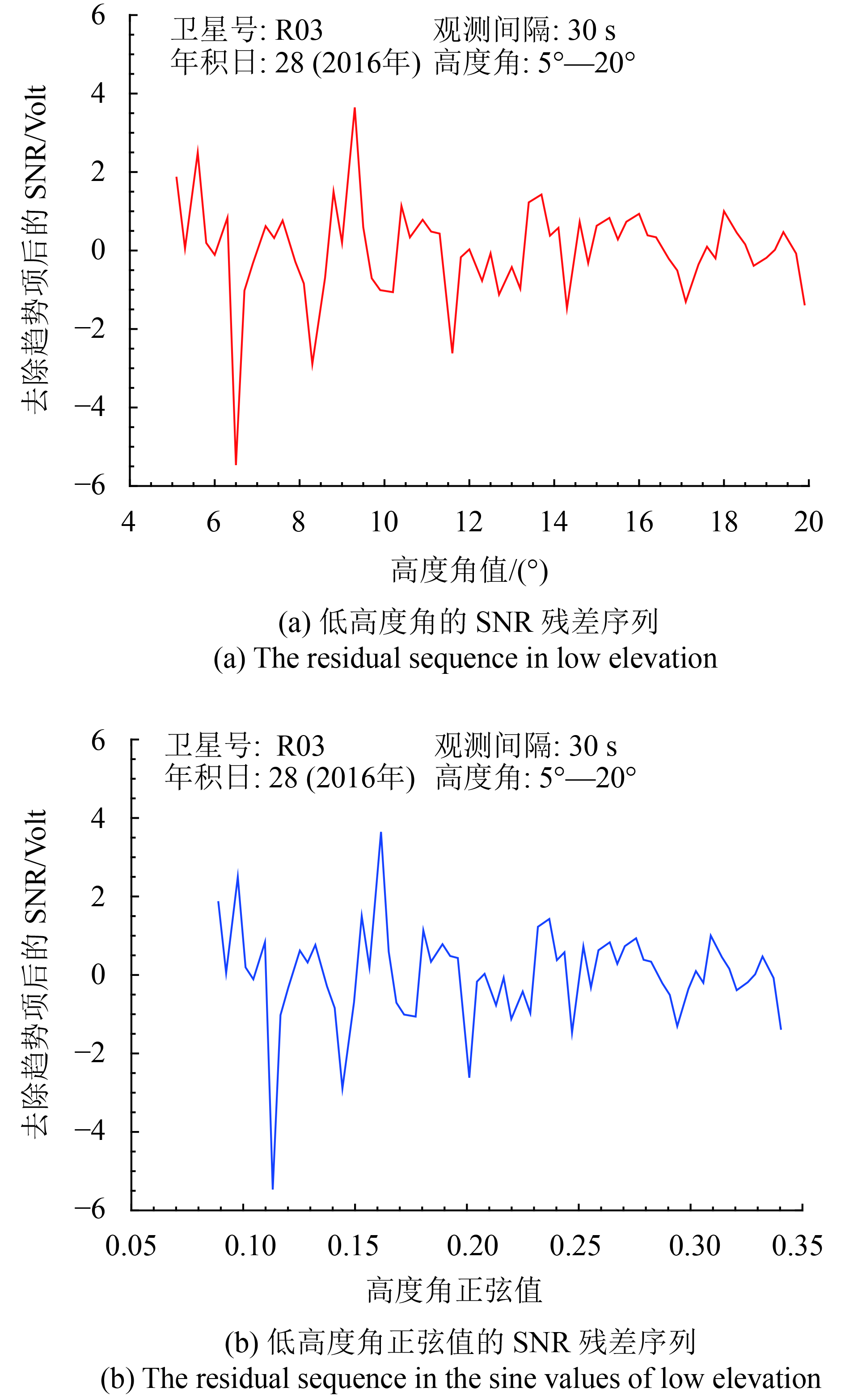
通过去除图2中SNR数据的整体趋势项(中间段),可得在低高度角下受多路径影响产生波动的SNR数据(红框内),如图4(a)所示。图4(b)表示高度角转化正弦值后的SNR残差序列。图4(a)和图4(b)的横轴分别表示GLONASS卫星的低高度角值和随卫星高度角变化的正弦已知量,其截止高度角在5°—20°;纵轴均表示去趋势项后线性化的SNR观测值,单位:Volt。图4中多路径反射信号的表示式(Bilich和Larson,2007)为
| ${S_{\rm{r}}} = A\cos \left(\frac{{4 {\text{π}} h}}{{\textit{λ}} }\sin E + {\textit{φ}}\right)$ | (5) |
式中,
| ${S_{\rm{r}}} = A\cos (2{\text{π}} ft + \phi)$ | (6) |
通过对式(6)进行L-S频谱分析可求最高频率
2.3 GLONASS-MR技术的反演流程
由于传统测量雪深的站点数量少以及观测数据连续性不足等因素导致难以探测大范围的雪深变化;卫星遥感技术只能得到积雪的覆盖信息而无法探测雪深数据(于灵雪 等,2013)。目前,IGS中心在全球架设了大量GNSS观测站,其观测数据可用来近实时、连续地监测雪深变化。
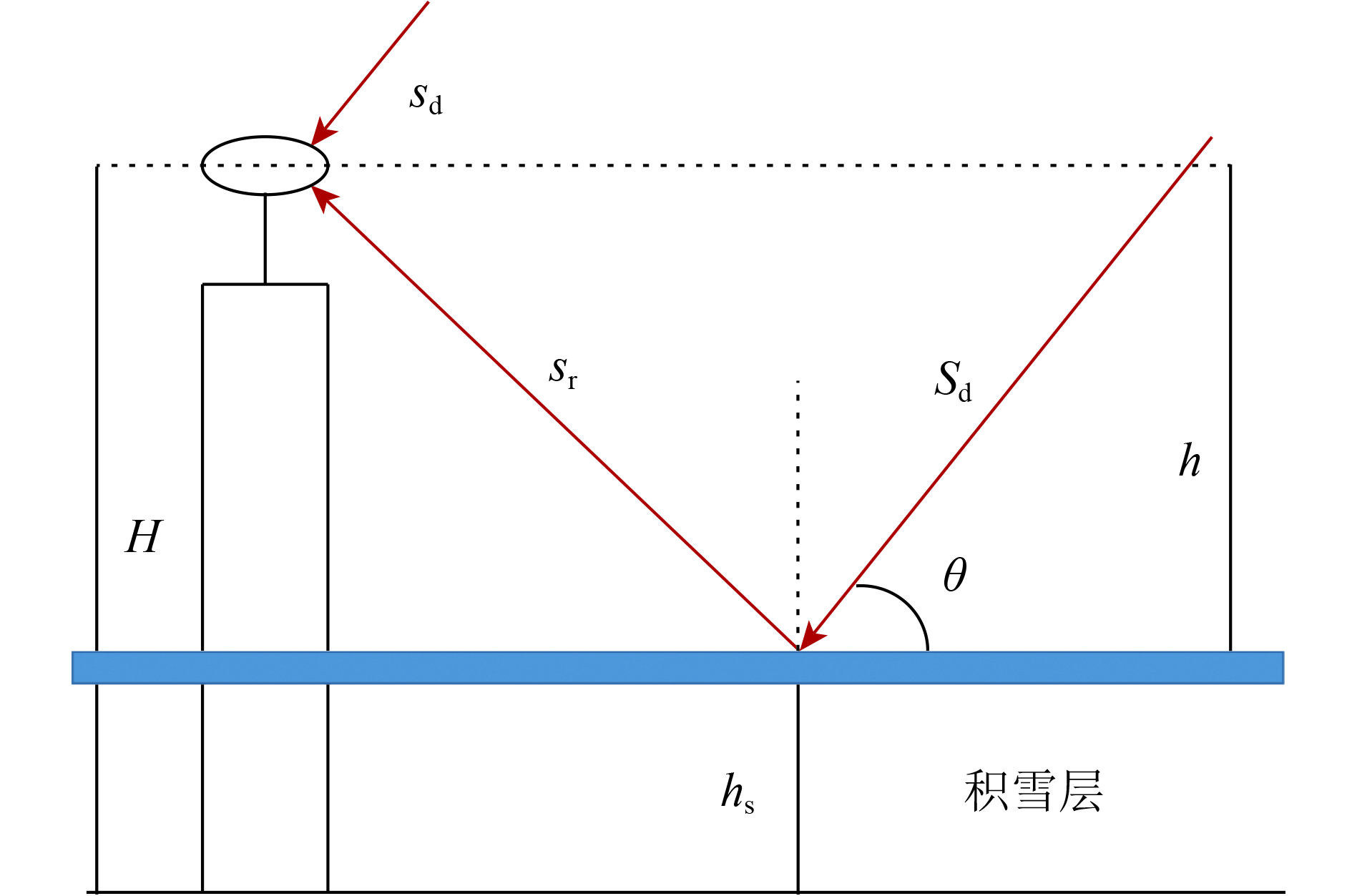
图5为GLONASS-MR技术探测雪深的结构示意图。图5中,
结合上述分析,采用GLONASS卫星反射信号的SNR数据的雪深测量技术主要包括以下几个步骤:
(1) 根据卫星观测站周围的地形、植被分布以及卫星接收数据的范围来筛选卫星数据。
(2) 根据最大化利用GLONASS卫星数据的原则,筛选在高度角范围(5°—20°)的卫星SNR数据。
(3) 通过低阶多项式拟合分离直射分量和反射分量,获取反射信号的高精度SNR数据。
(4) 利用Lomb-Scargle谱分析法对SNR残差序列进行频谱分析,可获取有效垂直距离,并进一步获取雪深值。
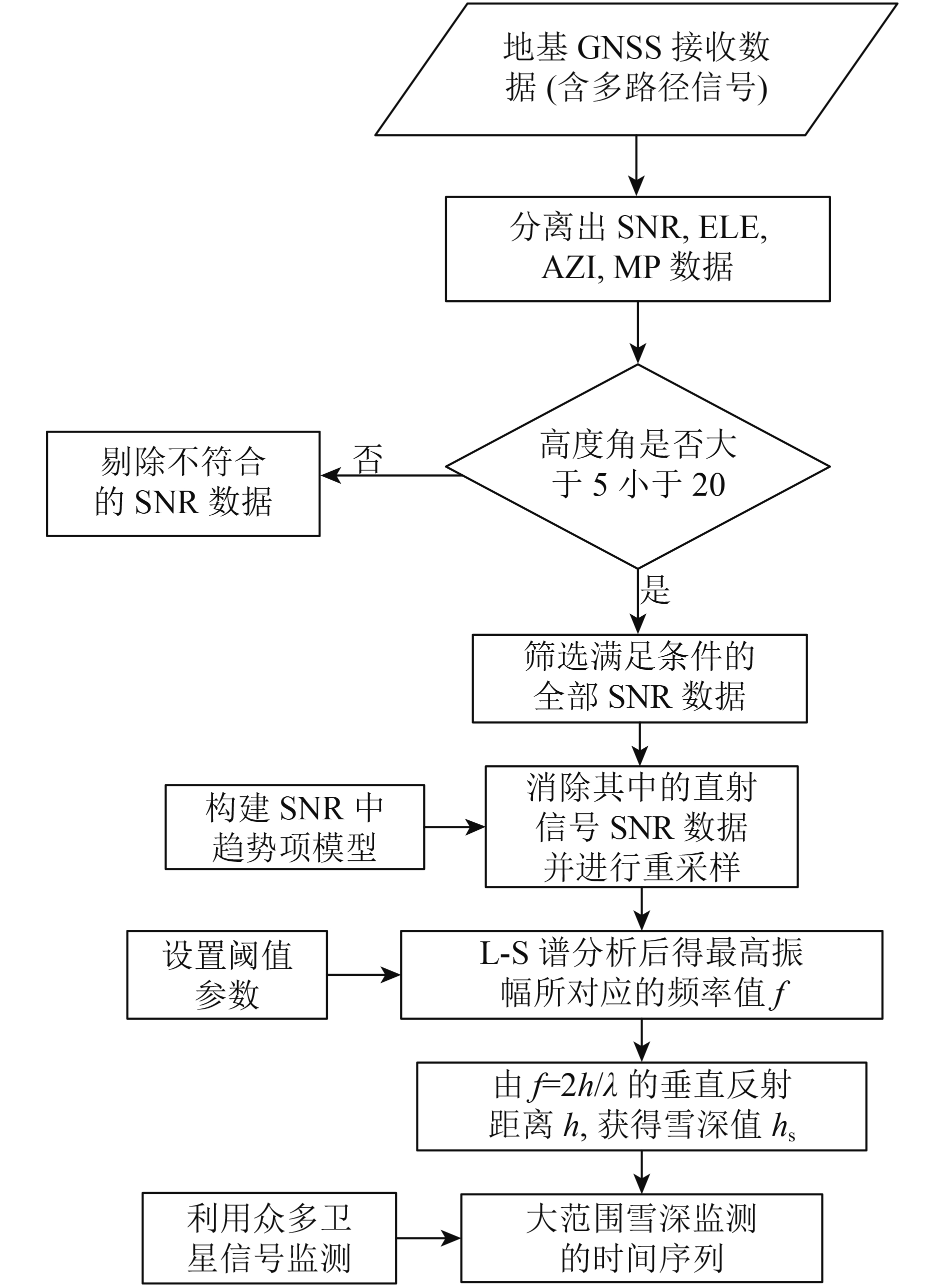
基于GLONASS-MR技术反演雪深的基本流程如下图6所示。
3 实例验证
3.1 数据简介与精度评定
为验证采用GLONASS卫星L1波段反射信号的SNR数据监测雪深理论的可靠性,选取yel2站2015年11月初到2016年6月底共243天的GLONASS卫星数据。yel2站位于加拿大黄刀镇,测站周围空旷且冬季常年被积雪覆盖。该测站接收机类型为SEPT POLARX4TR,天线类型为LEIAR25.R4,测站高1.8 m。同时,将位于黄刀镇的Y-H气象站的实测积雪数据作为真值。yel2观测站的实景 (http://www.igs.org/igs-network/net-work_by_site.php?site=yel2[2018-02-05])和位置分布如图7和图8所示,yel2观测站和Y-H气象站处于同一位置(图8的红色五角星处),保证了两者的观测数据具有同时性。
为评定反演雪深值的精度,本文将采用绝对偏差(Bias)、均方根误差RMSE(Root Mean Square Error)和确定系数(R2)进行精度评定,其数学表达式(7)分别为
| $\left\{ \begin{gathered} {\rm{Bias}} = \left| {{X_{{\rm{model}}, i}} - {X_{{\rm{obs}}, i}}} \right| \hfill \\ {\rm{RMSE}} = \sqrt {\frac{{\displaystyle\sum\limits_{i = 1}^n {{{({X_{{\rm{obs}}, i}} - {X_{{\rm{model}}, i}})}^2}} }}{n}} \hfill \\ {R^2} = \frac{{\displaystyle\sum\limits_{i = 1}^n {{w_i}{{({{\hat y}_i} - {{\bar y}_i})}^2}} }}{{\displaystyle\sum\limits_{i = 1}^n {{w_i}{{({y_i} - {{\bar y}_i})}^2}} }} \hfill \\ \end{gathered} \right.$ | (7) |
式中,


3.2 利用yel2站GNOLASS卫星的多天数据进行实例分析
为了保证提取GLONASS卫星L1波段反射信号的SNR数据的完整性,因此筛选出了卫星高度角为5°—20°,方位角为30°—330°的全部SNR数据,其中所得的部分最优雪深结果对应的方位角值如表1所示。根据表1可知,提取GLONASS卫星方位角的有效观测范围集中在100°—275°和300°—330°。
表 1 部分反演的最优雪深值的方位角分布范围
Table 1 The best azimuthal angles distribution of detecting partial snow depth
| 年积日 | 卫星方位角 | 卫星号 | 年积日 | 卫星方位角 | 卫星号 | |
| 335* | 220°—240° | R10 | 28 | 190°—200° | R01 | |
| 347* | 130°—140° | R05 | 34 | 100°—120° | R08 | |
| 356* | 130°—140° | R12 | 42 | 210°—240° | R05 | |
| 5 | 250°—265° | R01 | 50 | 300°—330° | R04 | |
| 10 | 265°—275° | R02 | 63 | 110°—125° | R15 | |
| 11 | 250°—265° | R07 | 70 | 150°—160° | R17 | |
| 19 | 300°—310° | R14 | 85 | 110°—130° | R13 | |
| 20 | 130°—140° | R09 | 92 | 130°—140° | R03 | |
| 21 | 215°—225° | R09 | 101 | 130°—140° | R04 | |
| 22 | 130°—140° | R05 | 105 | 50°—60° | R01 | |
| 23 | 225°—240° | R02 | 109 | 170°—180° | R02 | |
| 24 | 225°—240° | R03 | 113 | 300°—330° | R09 | |
| 25 | 140°—150° | R05 | 115 | 260°—275° | R23 | |
| 26 | 265°—275° | R02 | 136 | 150°—160° | R20 | |
| 27 | 130°—140° | R02 | 152 | 155°—165° | R14 | |
| 注:“*”表示2015的年积日,无“*”标识的为2016年的年积日。 | ||||||
为确定不同的积雪深度对GLONASS卫星多路径的SNR数据变化及其频谱振幅的影响,本文随机选取了YEL2站2015年第356年积日、2016年第050和152年积日的GLONASS卫星反射信号进行分析,结果如图9所示。图9中(a)(b)分别表示不同年积日的SNR残差序列及其对应的L-S频谱分析图,其从左向右均按照地表积雪深度不断增加的原则进行展示。图9(b)中横轴表示垂直反射距离,纵轴表示GLONASS卫星L1波段反射信号的SNR数据的频谱振幅。经由L-S谱分析法分析后所得的频谱振幅最高峰值所对应的垂直反射距离即为有效距离h,由之可求雪深值hs。
由图9(a)可知,积雪深度逐渐增加,其SNR残差序列波动的变化量并不明显,但振荡频率随之明显增大,由于地表积雪厚度增加使得积雪表面更加光滑平整,GLONASS卫星信号受到更强的镜面反射影响,从而导致多路径影响得到明显加强;同时,图9(b)的频谱分析结果表明:随着积雪深度逐渐增加,频谱振幅的峰值逐渐向左移动,即垂直反射距离逐渐变小。垂直反射距离h与频谱振幅强度的关系表明了GNSS观测站周围地表积雪厚度的变化与卫星低高度角的信噪比反射分量能量频谱的动态变化有着密切关联,验证了积雪厚度变化对卫星反射信号的SNR数据产生一定的规律性变化。

为探究反演雪深值hs与频谱振幅峰值(L1 peak)之间的关系,通过对连续多天的GLONASS卫星L1波段反射信号的SNR数据进行谱分析,即可得雪深及对应的频谱振幅峰值。由于篇幅有限,本文仅选取GLONASS R02卫星连续10年积日的L1波段SNR数据,所得部分雪深参数如表2所示。此外,图10表示连续10年积日的反演结果与频谱振幅峰值的相关性。校正曲线的方程式如图10中所示,其RMSE值分别为8.6 cm和7.6 cm,但其仅对yel2站GLONASS R02卫星的观测值有效,针对不同的GLONASS卫星和观测站点可进行调整。其中,R02卫星的校正曲线梯度最佳值在3.234—4.089 MHz/m,梯度变化主要依赖于卫星仰角的变化率。校正曲线将GLONASS R02卫星不同年积日的频谱振幅峰值与反演雪深值形成了线性相关。图10中反演点的整体趋势逐渐下降,由于卫星信号的反射点周围除了积雪外同时受其它地表环境影响,反演点与校正曲线之间产生了少量的偏差,但是这个差异并不能显著影响到多路径信号的规律性变化。
表 2 不同年积日的反演雪深值hs、L1峰值和绝对偏差
Table 2 The detected snow depth (hs), the peak values of L1 SNR and the absolute bias in different doys
| 卫星号 | 年份 | 年积日 | GLONASS卫星L1载波的频谱
强度最高峰值L1 peak/MHz |
垂直反射距离
h/m |
反演雪深值
hs/m |
反演值与实测值的
偏差大小Bias/m |
| R02 | 2016 | 19 | 3.875 | 1.475 | 0.325 | –0.045 |
| 20 | 3.708 | 1.456 | 0.344 | –0.026 | ||
| 21 | 3.358 | 1.406 | 0.394 | 0.034 | ||
| 22 | 3.247 | 1.339 | 0.461 | 0.071 | ||
| 23 | 3.387 | 1.372 | 0.428 | –0.012 | ||
| 24 | 3.703 | 1.503 | 0.297 | –0.113 | ||
| 25 | 3.288 | 1.343 | 0.457 | 0.047 | ||
| 26 | 3.496 | 1.400 | 0.400 | –0.010 | ||
| 27 | 3.416 | 1.391 | 0.409 | –0.041 | ||
| 28 | 3.565 | 1.429 | 0.371 | –0.079 |

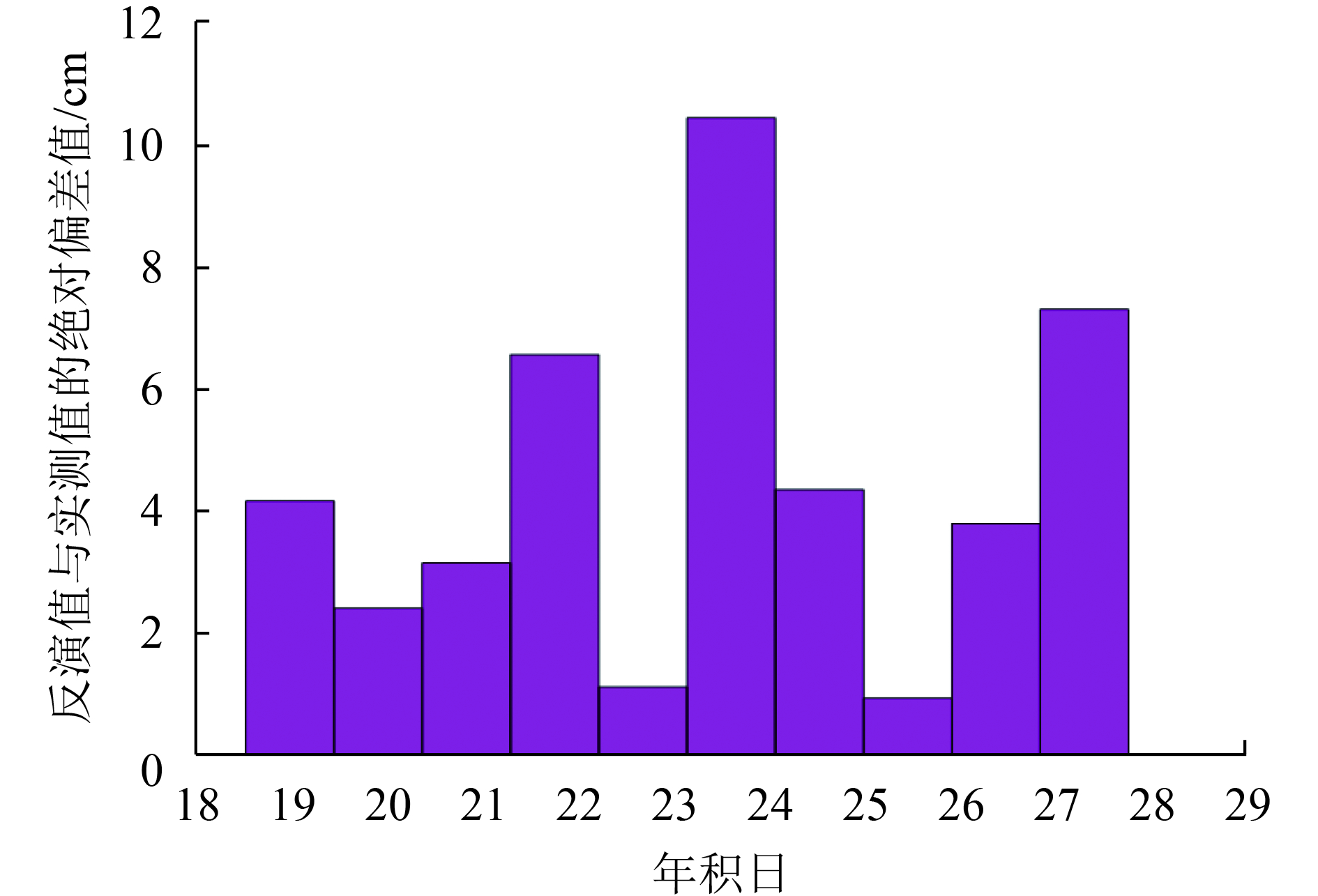
统计GLONASS R02卫星连续10个年积日的反演雪深与实测雪深之间的绝对偏差,如图11所示。由图11可知,同一GLONASS卫星连续多天探测雪深的结果与真实值误差波动变化明显,绝对偏差的最大值为11.3 cm,最小值为1.0 cm,平均值为4.8 cm。由于卫星不停运动,每天的有效探测卫星数量较少,GNSS接收机接收雪面反射的同一卫星低高度角信号则更少,使得同一卫星的SNR数据变化不明显,因此产生较大偏差,为保证探测精度需从多颗卫星中选取最优值。
下面利用yel2测站2015年连续15天(DOY 351—365)的GLONASS实测数据来进行说明,分别对每天的部分单颗卫星和多颗卫星的反演雪深值进行统计分析。图12反映了上述两者的情况,包含了依次为yel2站的实测雪深、R01、R05、R10、R12、R18、R22及多颗卫星联合的反演雪深值,每条散点折线分别代表单颗卫星的逐天所跟踪卫星反演的雪深值。图12表明了多颗卫星联合反演雪深值的稳定性明显高于单颗卫星的反演值。其主要原因可能是单颗GLONASS卫星不断运动导致其在空间中位置发生变化,GLONASS卫星信号反射后偏离原反射轨迹,此时接收机接收到的信号变少甚至无法接收到某卫星反射信号。

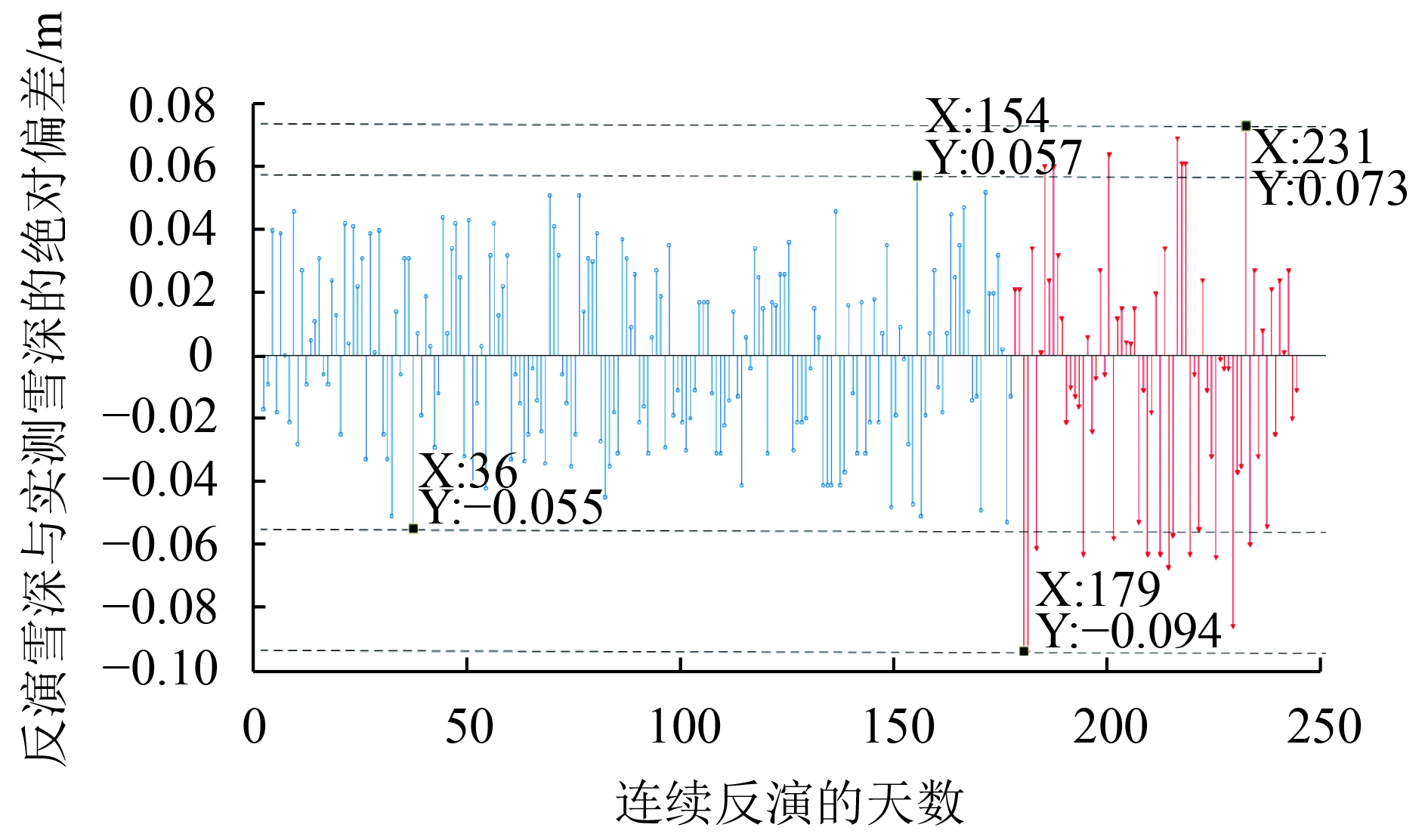
为进一步分析反演值与SNR数据之间的关系,对yel2站GLONASS卫星连续243天的SNR数据进行实验,结果如图13、图14所示。图13展示了反演雪深和实测雪深的点位趋势,并对前者进行了光滑曲线拟合,点位趋势和拟合趋势均反映出两者在连续时间序列上具有一致性,反演雪深和拟合曲线的均方根误差为2.8 cm,相关系数为0.988;反演雪深和实测雪深的均方根误差为3.3 cm,相关系数0.969。图14表示反演雪深与实测雪深的偏差,其中,最大偏差为5.7 cm,最小为0.2 cm,平均偏差为2.2 cm,RMSE为3.3 cm。当实测雪深为0(图14的后半段蓝色部分)时,反演结果的偏差较有积雪时(前半段红色部分)较大。其原因是YEL2站周围裸露地表且覆盖多种地物,地表无积雪使得地表介质的物理属性差异较大。结合图13和图14可知,反演雪深与实测雪深在时间序列上体现了连续性和一致性,其初步表明了基于GLONASS-MR技术在雪深探测领域的可行性。

为了说明反演雪深与实测雪深之间具有相关性,结果如图15所示。图15中,横轴表示实测雪深值,纵轴表示对应年积日的GLONASS-MR技术反演雪深值,两者联合的趋势从左到右逐渐上升,表现出明显的正相关线性关系,相关系数高达0.969,反演雪深的RMSE值为3.3 cm,进一步说明了基于GLONASS卫星L1波段反射信号的SNR数据适用于探测积雪深度。

4 结 论
为了充分利用GNSS观测数据遥感反演获取高精度的雪深信息,本文主要论述了采用GLONASS卫星L1载波反射信号的SNR观测值进行有效反演固定区域雪深数据的算法。针对加拿大黄刀镇地区,通过利用2015年11月到2016年6月的GNSS实测数据进行反演,将反演结果与监测站实测雪深数据进行对比验证,结果具有良好的相关性和反演精度,表明基于GLONASS-MR算法对固定区域的雪深反演具有不错的潜力。
通过具体实验结果的对比分析,可得出以下几个结论:(1) GNSS-MR模型的进一步扩展。目前受限于卫星系统的发展与维护,GNSS-MR模型研究缺乏多样性。本算法采用GLONASS卫星数据反演雪深可获取与GPS-MR技术类似精度的反演雪深数据,直接验证了GLONASS-MR技术反演雪深的适用性;(2) 不同雪深的反演关系探究。基于上述实验结果,由于存在不同深度的积雪,GLONASS卫星L1载波反射信号的SNR残差序列的振幅频率与之呈正相关,且基于同一颗GLONASS卫星的反演雪深值与其载波频谱振幅强度的峰值点具有线性相关性,由此在今后的研究中可尝试对不同深度的积雪进行分层的反演研究;(3) 反演精度的优化。通过随机选取单颗和多颗卫星的GNSS观测数据进行雪深反演并对多个连续年积日的反演雪深结果分析,两者反演偏差的平均值分别为2.9 cm和4.8 cm。为避免异常值出现影响实验结果,多卫星联合反演雪深再取平均值的效果明显更好,同时可改善同一卫星连续探测雪深的SNR观测量不足的缺陷,该方法可有效提高GLONASS卫星低高度角下反演雪深的精度和稳定性。
通过上述的实验总结,其实验结果表明了GLONASS-MR技术在雪深的动态变化监测方面具有良好的适用性和可靠性,成功实现监测固定区域积雪深度的目的,这与前人的研究结果相比是一致的。然而,前人大多仅对GPS卫星系统进行研究,并未系统性地分析基于GLONASS-MR技术反演雪深的结果。因此,本文主要的创新点是基于GNSS-MR算法,利用GLONASS卫星观测数据反演雪深来完善相关模型,为今后基于GPS和GLONASS(甚至BEIDOU卫星系统)双卫星系统联合反演雪深提供基础性工作。此外,本次实验同样存在几点不足:首先,使用的实验数据十分有限,该反演方法是否适用于其他的GNSS测站还需要更多的研究进行验证;其次,SNR观测量仅考虑去除直射信号分量,反射信号SNR数据中仍存在误差信号,还需进一步精化SNR数据。因此,希望在未来的研究中,希望能够建立一种反射信号SNR数据的误差改正模型,从而使得GLONASS-MR技术更好地应用。
志 谢 感谢IGS中心提供的GNSS卫星观测数据和美国国家气象中心(NCDC)提供的实地雪深监测数据。
参考文献(References)
-
Bilich A and Larson K M. 2007. Mapping the GPS multipath environment using the signal‐to‐noise ratio (SNR). Radio Science, 42 (6): RS6003 [DOI: 10.1029/2007RS003652]
-
Bilich A, Larson K M and Axelrad P. 2008. Modeling GPS phase multipath with SNR: case study from the Salar de Uyuni, Boliva. Journal of Geophysical Research, 113 (B4): B04401 [DOI: 10.1029/2007JB005194]
-
Comp C J and Axelrad P. 1998. Adaptive SNR-based carrier phase multipath mitigation technique. IEEE Transactions on Aerospace and Electronic Systems, 34 (1): 264–276. [DOI: 10.1109/7.640284]
-
Dai K Y, Zhang S C, Li Z Y, Zhao Y H and Nan Y. 2016. Snow depth detection with GPS SNR observations. Journal of Geodesy and Geodynamics, 36 (6): 525–528. [DOI: 10.14075/j.jgg.2016.06.013] ( 戴凯阳, 张双成, 李振宇, 赵迎辉, 南阳. 2016. 利用GPS的SNR观测值进行雪深监测研究. 大地测量与地球动力学, 36 (6): 525–528. [DOI: 10.14075/j.jgg.2016.06.013] )
-
Jin S G and Komjathy A. 2010. GNSS reflectometry and remote sensing: new objectives and results. Advances in Space Research, 46 (2): 111–117. [DOI: 10.1016/j.asr.2010.01.014]
-
Jin S G, Feng G P and Gleason S. 2011. Remote sensing using GNSS signals: current status and future directions. Advances in Space Research, 47 (10): 1645–1653. [DOI: 10.1016/j.asr.2011.01.036]
-
Larson K M, Gutmann E D, Zavorotny V U, Braun J J, Williams M W and Nievinski F G. 2009. Can we measure snow depth with GPS receivers?. Geophysical Research Letters, 36 (17): L17502 [DOI: 10.1029/2009GL039430]
-
Larson K M, Small E E, Gutmann E, Bilich A, Axelrad P and Braun J. 2008. Using GPS multipath to measure soil moisture fluctuations: initial results. GPS Solutions, 12 (3): 173–177. [DOI: 10.1007/s10291-007-0076-6]
-
Larson K M and Small E E. 2016. Estimation of snow depth using L1 GPS signal-to-noise ratio data. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 9 (10): 4802–4808. [DOI: 10.1109/JSTARS.2015.2508673]
-
Liu F L. 2015. Research on the Ocean Altimetry with GPS Reflection Signal. Shanghai: Shanghai Ocean University (刘风玲. 2015. 基于GPS反射信号的海面高度反演技术研究. 上海: 上海海洋大学)
-
Ozeki M and Heki K. 2012. GPS snow depth meter with geometry-free linear combinations of carrier phases. Journal of Geodesy, 86 (3): 209–219. [DOI: 10.1007/s00190-011-0511-x]
-
Qian X D and Jin S G. 2016. Estimation of snow depth from GLONASS SNR and phase-based multipath reflectometry. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 9 (10): 4817–4823. [DOI: 10.1109/JSTARS.2016.2560763]
-
Solomon S, Qin D, Manning M, Chen Z, Marquis M, Averyt K B, Tignor M and Miller H L. 2007. Climate Change 2007: The Physical Science Basis. Contribution of Working Group I to the Fourth Assessment Report on the Intergovernmental Panel on Climate Change. Cambridge: Cambridge University Press.
-
Wan W, Chen X W, Li G P and Zeng K X. 2012. GNSS reflectometry: a review of theories and empirical applications in ocean and land surfaces. Remote Sensing Information, 27 (3): 112–119. [DOI: 10.3969/j.issn.1000-3177.2012.03.019] ( 万玮, 陈秀万, 李国平, 曾开祥. 2012. GNSS-R遥感国内外研究进展. 遥感信息, 27 (3): 112–119. [DOI: 10.3969/j.issn.1000-3177.2012.03.019] )
-
Wan W, Chen X W, Peng X F, Bai W H, Xia J M, Liang H, Zhang X M, Xiong P and Yang T. 2016. Overview and outlook of GNSS remote sensing technology and applications. Journal of Remote Sensing, 20 (5): 858–874. [DOI: 10.11834/jrs.20166228] ( 万玮, 陈秀万, 彭学峰, 白伟华, 夏俊明, 梁宏, 张学民, 熊攀, 杨婷. 2016. GNSS遥感研究与应用进展和展望. 遥感学报, 20 (5): 858–874. [DOI: 10.11834/jrs.20166228] )
-
Wan W, Li H, Hong Y, Chen X W and Peng X F. 2015. Definition and application of GNSS-R observation patterns. Journal of Remote Sensing, 19 (6): 882–893. [DOI: 10.11834/jrs.20154304] ( 万玮, 李黄, 洪阳, 陈秀万, 彭学峰. 2015. GNSS-R遥感观测模式及陆面应用. 遥感学报, 19 (6): 882–893. [DOI: 10.11834/jrs.20154304] )
-
Wang Y Q, Yan W, Fu Y and Luan Y. 2009. Soil moisture determination of reflected GPS signals from aircraft platform. Journal of Remote Sensing, 13 (4): 678–690. [DOI: 10.11834/jrs.20090410] ( 王迎强, 严卫, 符养, 栾毅. 2009. 机载GPS反射信号土壤湿度测量技术. 遥感学报, 13 (4): 678–690. [DOI: 10.11834/jrs.20090410] )
-
Xu B, Yang T, Tan B H and Chen Y. 2011. The simulate study of signal detection based on Lomb-Scargle algorithm. Nuclear Electronics and Detection Technology, 3-1 (6): 702–705. [DOI: 10.3969/j.issn.0258-0934.2011.06.026] ( 徐斌, 杨涛, 谭保华, 陈益. 2011. 基于Lomb-Scargle算法的周期信号探测的模拟研究. 核电子学与探测技术, 3-1 (6): 702–705. [DOI: 10.3969/j.issn.0258-0934.2011.06.026] )
-
Yu L X, Zhang S W, Bu K, Yang J C, Yan F Q and Chang L P. 2013. A review on snow data sets. Scientia Geographica Sinica, 33 (7): 878–883. [DOI: 10.13249/j.cnki.sgs.2013.07.015] ( 于灵雪, 张树文, 卜坤, 杨久春, 颜凤芹, 常丽萍. 2013. 雪数据集研究综述. 地理科学, 33 (7): 878–883. [DOI: 10.13249/j.cnki.sgs.2013.07.015] )
-
Yu K, Ban W, Zhang X and Yu X. 2015. Snow depth estimation based on multipath phase combination of GPS triple-frequency signals. IEEE Transactions on Geoscience & Remote Sensing, 53 (9): 5100–5109. [DOI: 10.1109/TGRS.2015.2417214]
-
Yuan L G, Huang D F, Ding X L, Xiong J L, Zhong P and Li C G. 2004. On the influence signal multipath effects in GPS carrier phase surveying. Acta Geodaetica et Cartographica Sinica, 33 (3): 210–215. [DOI: 10.3321/j.issn:1001-1595.2004.03.005] ( 袁林果, 黄丁发, 丁晓利, 熊永良, 钟萍, 李成钢. 2004. GPS载波相位测量中的信号多路径效应影响研究. 测绘学报, 33 (3): 210–215. [DOI: 10.3321/j.issn:1001-1595.2004.03.005] )
-
Zhao R and Zhao Z H. 2009. Solution of the multipath error of GPS. Science of Surveying and Mapping, 34 (5): 21–22. ( 赵润, 赵治华. 2009. GPS多路径误差处理技术. 测绘科学, 34 (5): 21–22. )
-
Zhou X Z and Shao L J. 2012. Simulation techniques of GNSS-R sea surface wind field retrieval from airborne remote sensing. Journal of Remote Sensing, 16 (1): 143–153. [DOI: 10.11834/jrs.20120431] ( 周晓中, 邵连军. 2012. GNSS-R航空遥感海面风场仿真技术. 遥感学报, 16 (1): 143–153. [DOI: 10.11834/jrs.20120431] )


