

|
收稿日期: 2017-05-27
基金项目: 国家自然科学基金(编号:41171262);水利部公益性行业科研专项(编号:201501012)
第一作者简介: 于佩鑫,1992年生,女,硕士研究生,研究方向为植被遥感和遥感图像分类。E-mail:yupeixin19921227@126.com
通信作者简介: 刘素红,1967年生,女,教授,研究方向为植被遥感和遥感图像解译。E-mail:liush@bnu.edu.cn
中图分类号: TP751
文献标识码: A
|
摘要
东北黑土区是中国重要的粮食生产区,而长期的开垦造成了严重的水土流失现象,坡耕地表面出现大量的侵蚀沟。侵蚀沟的识别是土壤侵蚀监测的重要手段之一,目前遥感技术在侵蚀沟的识别中应用广泛,但自动化程度不高。针对特定地物影像的识别,如何选取最能够有效描述该地物的特征是解决问题的关键。本文构建了耕地和侵蚀沟遥感影像的训练样本集,基于样本集分别提取了由光谱特征和纹理特征组成的浅层特征、SIFT特征经编码后得到的中层特征,以及利用卷积神经网络提取的深层特征;再基于不同层次的特征选用合适的分类器对遥感影像进行分类,识别出含有侵蚀沟的遥感影像,形成了一套针对侵蚀沟的特征提取与识别方法,为东北黑土区的耕地保护提供有力支持。测试结果表明:基于中层特征的识别精度最高,为98.5%,但该特征需要人工设计,自动化程度有限;而利用卷积神经网络可自动提取深层特征,其识别精度达到了95.5%,同时大大提高了自动化程度,满足侵蚀沟影像的识别的需求。
关键词
侵蚀沟, 训练样本, 浅层特征, 中层特征, 深层特征, 卷积神经网络
Abstract
Northeast China is a major commodity grain base in China. The protection of cultivated lands in Northeast China is crucial for safeguarding the food security in China. The recognition of erosion gullies is an important means of monitoring soil erosion. Furthermore, remote sensing technology is extensively used in this field given the multiple advantages of this technology. However, the traditional methods based on remote sensing mostly depend on manual interpretations. Therefore, the degree of the automation and the efficiency are relatively low. In this study, multi-level features were extracted, thereby effectively describing the specific objects by using machine and deep learnings, and erosion gullies were identified based on these features to improve the accuracy and efficiency of recognizing erosion gullies. In this study, we first cut the remote sensing images in a fixed size and labeled these images manually to create datasets as training samples that consist of two categories, namely, farmland and erosion gully. Second, we extracted spectral and textural features based on this dataset as low-level features, encoded SIFT features through ScSPM as middle-level features, and extracted high-level features by using CNN. Third, a linear SVM and a softmax classifier were applied to classify the remote sensing images based on the multi-level features to identify the images with erosion gullies. Finally, we completed a set of methods to extract the feature and recognize the erosion gully, thereby providing a robust support for protecting arable land in the black soil area of Northeast China. The multi-level features extracted through the proposed method demonstrate specific capabilities in identifying erosion gully images. In the test phase, results show that the recognition outcome based on low-level features exhibits the lowest accuracy (91.1%), whereas the recognition accuracy based on middle-level features is the highest (98.5%). However, both features require a manual design. Hence, the degree of automation is limited. By contrast, the CNN can extract high-level features and automatically achieve an " end-to-end” learning, which highly improves the degree of automation of erosion gully recognition. Furthermore, the recognition accuracy based on high-level features is 95.5%, which satisfies the expectation of this study. The recognition accuracy is slightly lower in the validation phase than in the test phase because the images typically contain several irrelevant objects in the practical application, thereby preventing the improvement of the accuracy. However, the proposed method can generally identify the erosion gullies in the images with a reasonable practicality. Low-level features demonstrate several advantages, such as simple calculation and low time consumed. However, the capability to describe the erosion gully is relatively poor, thus resulting in low recognition accuracy. By contrast, the methods based on middle- and high-level features can identify nearly all the erosion gullies in the images, although these methods are time-consuming during the early training phase. Specifically, the method based on high-level features can automatically recognize the erosion gully. This study shows that deep learning has a great potential in remote sensing image application. If the sample size is continuously increased and the network structure expanded, then the recognition accuracy of erosion gully can be further improved.
Key words
erosion gullies, training samples, low-level features, middle-level features, high-level features, convolution neural network
1 引 言
耕地是人类赖以生存和发展的基础,耕地保护一直以来都是中国土地资源管理的核心(李宪文和林培,2001)。东北黑土区是中国最大的商品粮产区,其粮食生产能力和农业可持续性关系到国家的粮食安全战略(程叶青和张平宇,2005)。然而经过长期开垦,黑土区坡耕地的土壤受到了侵蚀,造成了严重的水土流失现象,尤其是侵蚀沟发展迅速,在全国范围内实属罕见,引起了广泛关注。根据侵蚀沟的发育阶段,可将其分为细沟、切沟、冲沟和坳沟(范昊明 等,2007)。细沟一般宽0.5 m,深0.1—0.4 m,长可达数米;切沟已有明显的边缘,宽、深均可达1—2 m,沟口处开始形成陡坎;冲沟沟口已形成明显的陡坎,沟坡处经常发生崩塌、滑坡,致使沟槽不断加宽,深达几米至几十米,长可达几百米;坳沟浅而宽,沟底由大量碎屑物填充。侵蚀沟的识别是土壤侵蚀监测工作中的一个关键问题,对坡耕地保护和水土流失防治具有重要意义,引起人们的广泛关注。
兴起于20世纪60年代的遥感技术,因具有大范围、多时相、低成本的优势,在侵蚀沟识别中应用广泛(闫业超 等, 2005, 2007),但传统方法多依赖人工解译,自动化程度不高,方法效率较低(Mcinnes 等,2011)。为不断提高侵蚀沟识别的效率和精度,众多方法被相继提出。其中,基于像元的分类方法较为普遍(Metternicht和Zinck,1998),但由于单一像元会丢失很多信息,在识别分类中会有很大的局限(Blaschke和Strobl,2001)。相比之下,基于对象的分类方法利用一个对象的光谱信息、几何信息、纹理信息等,可大大提高分类精度(Shruthi 等,2011)。然而随着遥感影像分辨率的不断提高,一幅遥感影像中包含多种场景的语义信息,基于场景的分类方法可以更好的揭示其空间特征和结构特征,对图像的解译能力更好(Chen 等,2011)。
对不同场景进行分类识别需要进行特征的选取。图像的特征可分为浅层特征、中层特征和深层特征(Xia 等,2016)。其中,浅层特征是描述图像的最基本特征,提取方法简单,复杂度较低;中层特征通常是对浅层特征进行编码得来,相比用于描述局部特征的浅层特征,中层特征能更好地描述图像的全局特征;而深层特征是深度学习模仿生物神经系统在处理信息时的分级特点,由浅到深逐步抽象而来,相比于浅层特征和中层特征,深层特征更为抽象,层次越深对数据的抽象程度越高,也越能反应数据的本质。浅层特征包括光谱特征、纹理特征、结构特征、SIFT(Scale Invariant Feature Transform)特征(Lowe,2004)等,通常把多个浅层特征组合起来可以优化分类结果,Luo等人(2013)将6种浅层特征组合成多特征来进行多分辨率遥感影像的分类检索,结果表明多个特征的结合能更好的描述遥感影像。中层特征的编码方法中,最为人熟知的编码方法是词袋模型(Yang和Newsam,2010),但词袋模型忽视了图像局部的空间分布特征,SPM(Spatial Pyramid Matching)方法(Lazebnik 等,2006)可以很好的弥补这一不足,而ScSPM方法(Yu,2013)用稀疏编码代替了SPM中的k-means算法,进一步提高了图像识别的精度。提取深层特征的深度学习方法中,最具代表性的是卷积神经网络CNN(Convolutional Neural Network),比较典型的有AlexNet(Krizhevsky 等,2012),VGGNet(Simonyan和Zisserman,2014),GoogLeNet(Szegedy 等,2015)等,均在图像识别领域取得了出色的成果。
本文为提高侵蚀沟遥感影像识别的精度和自动化程度,选择基于场景的分类方法,提取光谱特征和纹理特征为浅层特征,由ScSPM编码后的SIFT特征为中层特征,以及利用CNN提取的深层特征,依据这3种特征分别对遥感影像的不同场景进行分类,识别出侵蚀沟影像,并根据识别精度对比分析不同层次特征对侵蚀沟影像的描述能力。
2 方法原理
2.1 样本选取
在图像识别中,其结果的好坏依赖于样本的质量和数量。本文针对东北黑土区坡耕地中的侵蚀沟这一特定识别目标,对训练样本进行了人工判别和选取。侵蚀沟包括细沟、切沟、冲沟和坳沟,其中,细沟的宽度约0.5 m,即便在高分辨率遥感影像上也较难分辨,而坳沟的形态尺度过大,在小尺度的影像中难以显示全貌。因此受到遥感影像分辨率和图像样本尺度的限制,本文所研究的侵蚀沟主要为冲沟和切沟。
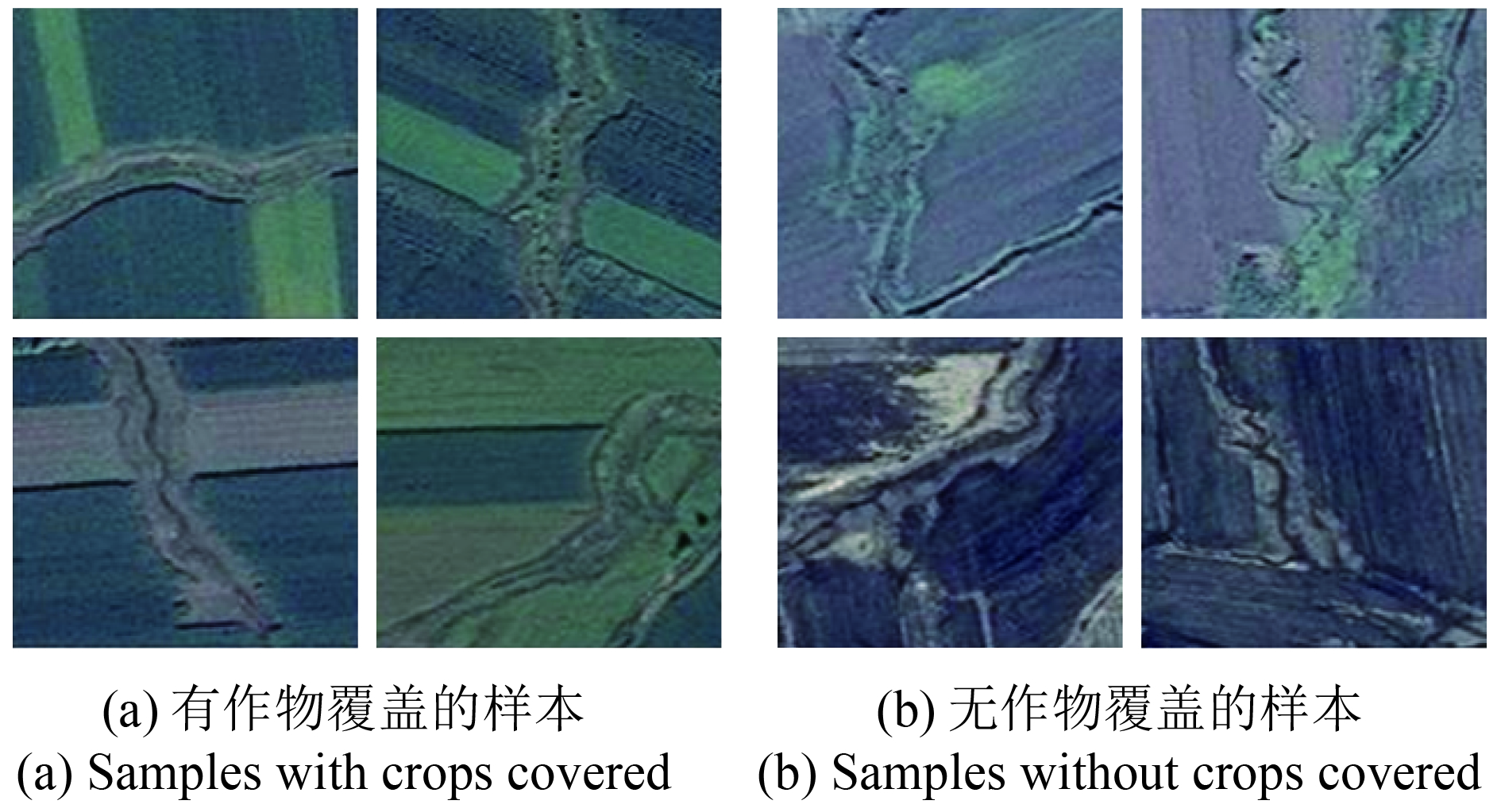
样本分为未侵蚀耕地和侵蚀沟两大类,其中,耕地的判别依据为耕地地块完整不破碎,耕地表面均匀或受田垄分割呈规则整齐分布;侵蚀沟的判别依据为:耕地中有明显较为弯曲的沟壑分布,沟壑的边缘不整齐,沟体周围耕地受侵蚀严重,耕地被分割破碎不规则。
2.2 多层次特征提取
本文所用的多层次特征是指浅层特征、中层特征和深层特征,这3种不同层次的特征在描述图像时具有各自的特点和优势。
2.2.1 浅层特征提取
浅层特征选取的是光谱特征和纹理特征,为突出浅层特征计算量少,提取难度低的优势,光谱特征选择了两个基本的统计量:波段均值(μ)和波段标准差(σ);纹理特征通过计算图像的灰度共生矩阵(Haralick 等,1973)来获得,选取了对比度(CT)、相关性(CR)、能量(E)和同质度(H)。浅层特征向量F定义为
| ${{F}} = \left( {\mu ,\sigma ,CT,CR,E,H} \right)$ | (1) |
相关计算公式如下:
| $\mu = \frac{1}{N}\mathop \sum \limits_{i,j}^N p\left( {i,j} \right)$ | (2) |
| $\sigma = \sqrt {\frac{1}{{N - 1}}\mathop \sum \limits_{i,j}^N {{\left| {p\left( {i,j} \right) - \mu } \right|}^2}} $ | (3) |
| $CT = \mathop \sum \limits_{i,j} {\left| {i - j} \right|^2}p\left( {i,j} \right)$ | (4) |
| $CR = \frac{\displaystyle{\mathop \sum \limits_{i,j} \left( {i - {\mu _i}} \right)\left( {j - {\mu _j}} \right)p\left( {i,j} \right)}}{{{\sigma _i}{\sigma _j}}}$ | (5) |
| $E = \mathop \sum \limits_{i,j} {\left\{ {p\left( {i,j} \right)} \right\}^2}$ | (6) |
| $H = \mathop \sum \limits_{i,j} \frac{1}{{1 + \left| {i - j} \right|}}p\left( {i,j} \right)$ | (7) |
式中,N是像元数,p(i, j)是(i, j)处的归一化值。
2.2.2 中层特征提取
提取中层特征,首先计算图像的SIFT特征。SIFT特征描述了特征点4×4邻域内Gaussian图像梯度大小和方向的统计结果,是一个128维的向量,它具有图像尺度和旋转的不变性。然后使用结合了稀疏编码与最大池化的ScSPM方法对SIFT特征进行处理,将编码后的SIFT特征作为图像的中层特征。
2.2.3 深层特征提取
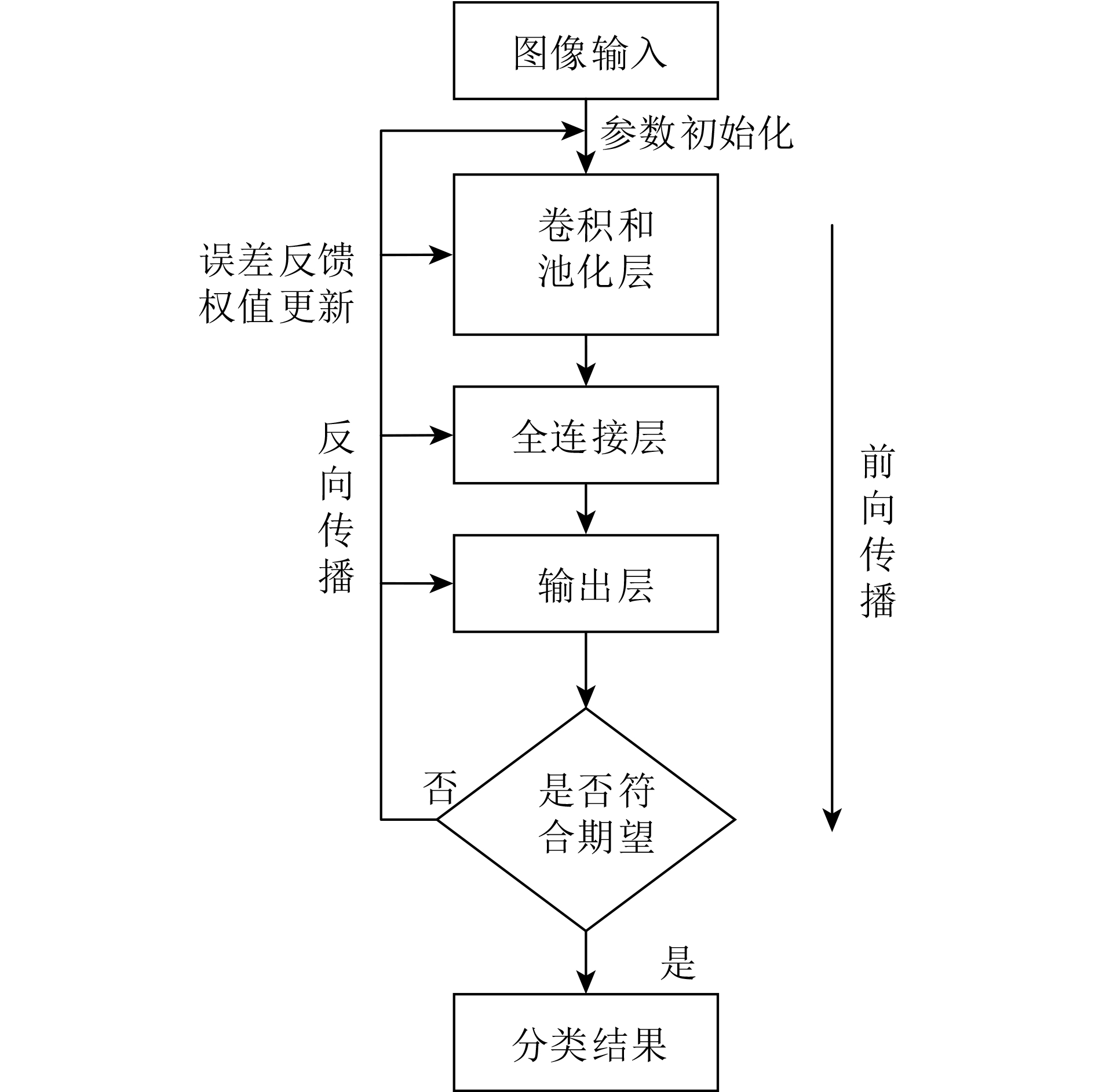
深层特征依靠深度学习的方法来获取,本文利用CNN网络来提取图像的深度特征。首先构建一个CNN网络,将训练样本输入该网络,经过多层的卷积和池化操作到输出,再利用反向传播算法不断训练直到网络收敛,最终获得的深层特征就被保存在该网络中。网络的训练过程如图1所示。

2.3 分类识别
针对浅层特征和中层特征,利用线性SVM分类器(Gualtieri和Chettri,2000)进行分类识别;而基于深层特征的分类识别,则使用CNN网络末端的Softmax分类器直接输出分类结果。
识别精度总体分类精度OA(Overall Accuracy)表示,即所有样本中被正确分类样本的比例:
| $OA = \mathop \sum \limits_{i = 1}^m \frac{{{x_i}}}{M}$ | (8) |
式中,m是被正确分类的样本数,M是总样本数。
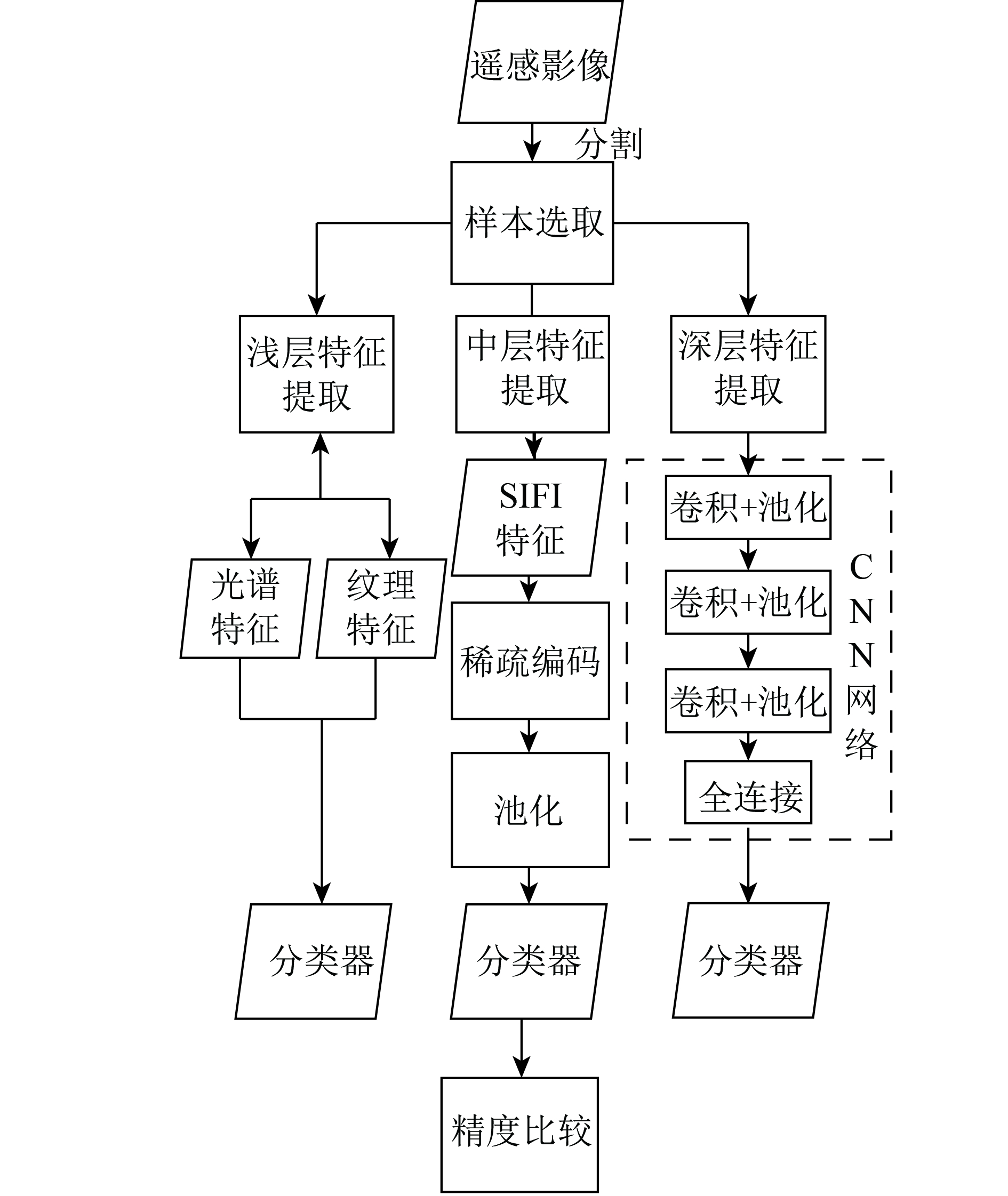
本文基于多层次特征的侵蚀沟遥感影像自动识别的技术路线如图2所示。
3 实验结果与分析
3.1 实验数据及样本选取
3.1.1 实验数据
遥感影像种类丰富,不同类型的遥感影像在不同应用领域中各具优势,而高质量、易获取的遥感影像为本文的研究提供了可能。
从形态上分析发现东北黑土区的侵蚀沟宽度一般较小,尤其在发育初期,宽度不足1 m,在低分辨率遥感影像上难以分辨,因此样本选取对遥感影像的空间分辨率要求较高。此外,耕地作为一类具有季节变化特征的地物,其特征也具有时间序列的变化,如有庄稼覆盖的耕地和收割后的裸露耕地在其特征上差异较大,所以应选取多时相的遥感影像,避免样本的单一性。
Google Earth遥感影像为RGB彩色图像,因其获取便利、具备高空间分辨率等优势在遥感领域应用广泛。综合考虑,选定东北黑土区多时相空间分辨率为0.4 m的Google Earth影像作为实验数据。
3.1.2 样本选取结果
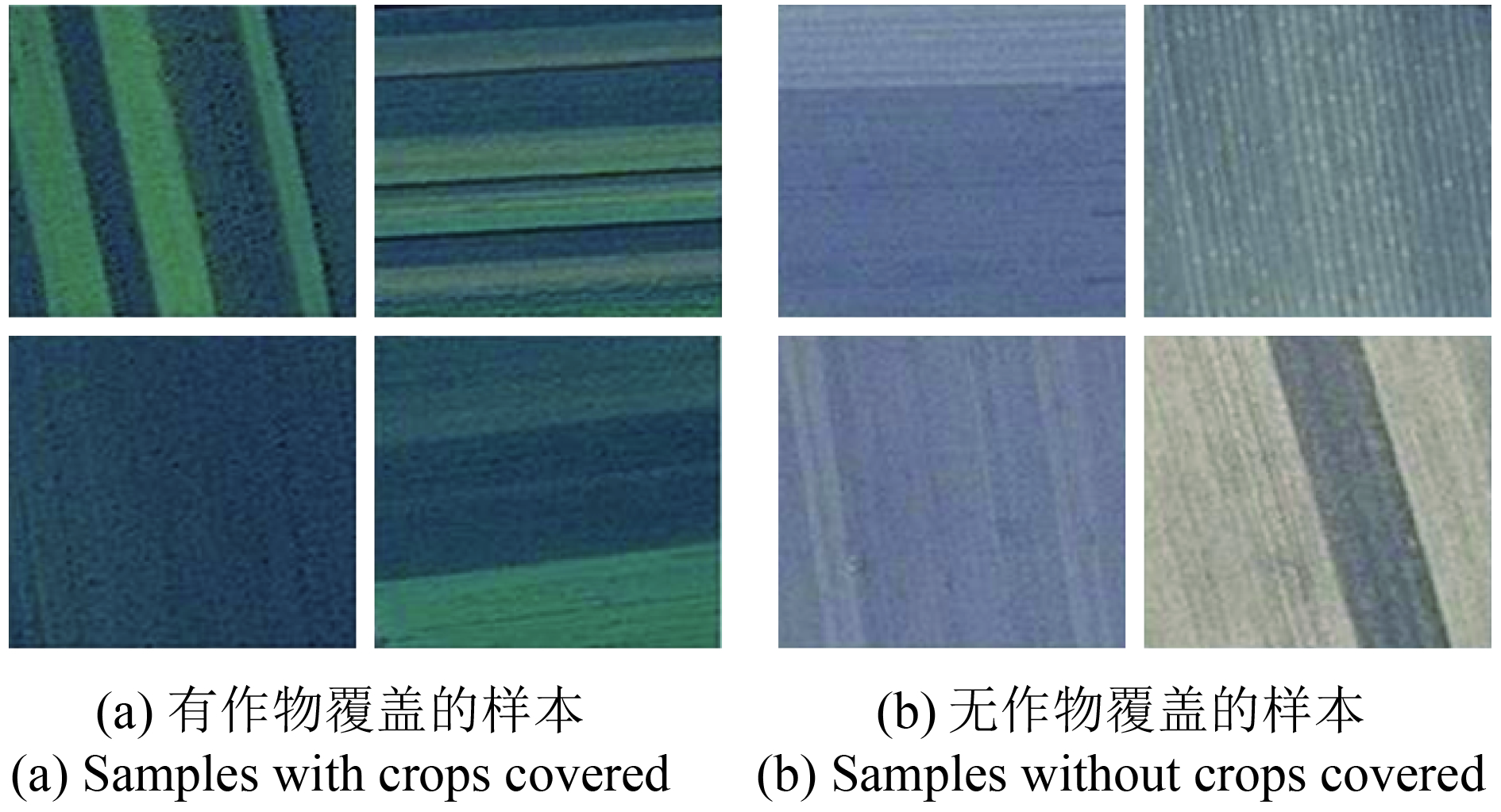
东北黑土区的耕地在100 m×100 m的范围内较为均匀,侵蚀沟在该尺度上也易于识别,因此将每幅训练影像的大小设为256 m×256 m,这样一方面使得训练样本具有较高的质量,另一方面也保证了训练样本选取工作的效率。样本分为两类:一是没被侵蚀过的耕地,样本容量为1200,图3给出了部分未侵蚀耕地的训练样本示例;二是耕地的侵蚀沟,样本容量为600,图4给出了部分耕地侵蚀沟的训练样本示例。
3.2 特征提取和网络设计
3.2.1 浅层特征
从样本中提取的浅层特征如表1所示,根据公式(1)分别提取彩色图像中R、G、B3个波段的特征,最终每幅图像的浅层特征为一个18维的向量:
| ${{{F}}_{{\rm{rgb}}}} = \left( {{{{\mu}} _{{\rm{rgb}}}},{{{\sigma}} _{{\rm{rgb}}}},{{{CT}}_{{\rm{rgb}}}},{{{CR}}_{{\rm{rgb}}}},{{{E}}_{{\rm{rgb}}}},{{{H}}_{{\rm{rgb}}}}} \right)$ |
计算众样本浅层特征中单个特征的均值和标准差,如表2所示,其中类别1表示耕地样本,类别2表示侵蚀沟样本。对比分析两类样本的浅层特征统计量发现,两类样本的光谱特征存在一定的差异,纹理特征差异相对较小,但也有所区分,综合多个浅层特征,可以在一定程度上将二者分类。
表 1 浅层特征
Table 1 Low-level features
| 特征 | 名称 | 数量 | |
| 光谱特征 | 均值 | μr,μg,μb | 3 |
| 标准差 | σr,σg,σb | 3 | |
| 纹理特征 | 对比度 | CTr,CTg,CTb | 3 |
| 相关性 | CRr,CRg,CRb | 3 | |
| 能量 | Er,Eg,Eb | 3 | |
| 同质度 | Hr,Hg,Hb | 3 |
表 2 浅层特征统计量
Table 2 Statistics of low-level features
| μr | μg | μb | σr | σg | σb | |
| 均值1 | 78.19 | 94.76 | 99.32 | 13.07 | 12.65 | 9.89 |
| 均值2 | 75.08 | 91.58 | 95.36 | 18.04 | 16.99 | 14.48 |
| 差值 | 3.11 | 3.18 | 3.96 | –4.97 | –4.36 | –4.59 |
| 标准差1 | 33.56 | 24.25 | 18.98 | 6.73 | 5.62 | 4.28 |
| 标准差2 | 16.89 | 12.26 | 11.21 | 7.47 | 7.05 | 6.55 |
| 差值 | 16.67 | 11.99 | 7.77 | –0.74 | –1.43 | –2.27 |
| CTr | CTg | CTb | CRr | CRg | CRb | |
| 均值1 | 0.12 | 0.09 | 0.12 | 0.72 | 0.71 | 0.63 |
| 均值2 | 0.14 | 0.13 | 0.14 | 0.82 | 0.80 | 0.75 |
| 差值 | –0.02 | –0.04 | –0.02 | –0.10 | –0.09 | –0.12 |
| 标准差1 | 0.05 | 0.05 | 0.06 | 0.13 | 0.15 | 0.12 |
| 标准差2 | 0.05 | 0.06 | 0.07 | 0.06 | 0.07 | 0.07 |
| 差值 | 0 | –0.01 | –0.01 | 0.07 | 0.08 | 0.05 |
| Er | Eg | Eb | Hr | Hg | Hb | |
| 均值1 | 0.49 | 0.59 | 0.55 | 0.94 | 0.95 | 0.94 |
| 均值2 | 0.39 | 0.47 | 0.48 | 0.93 | 0.94 | 0.93 |
| 差值 | 0.10 | 0.12 | 0.07 | 0.01 | 0.01 | 0.01 |
| 标准差1 | 0.19 | 0.20 | 0.21 | 0.02 | 0.02 | 0.03 |
| 标准差2 | 0.14 | 0.17 | 0.20 | 0.02 | 0.03 | 0.03 |
| 差值 | 0.05 | 0.03 | 0.01 | 0 | –0.01 | 0 |
3.2.2 中层特征
中层特征的提取是在Matlab中编程实现,首先提取图像的SIFT特征,计算用时10 min;然后将SIFT特征进行稀疏编码操作,该过程耗时较长,用时约1953 min;再经过最大池化,最终每幅图像都生成一个21504维的向量,即为中层特征。
3.2.3 深层特征
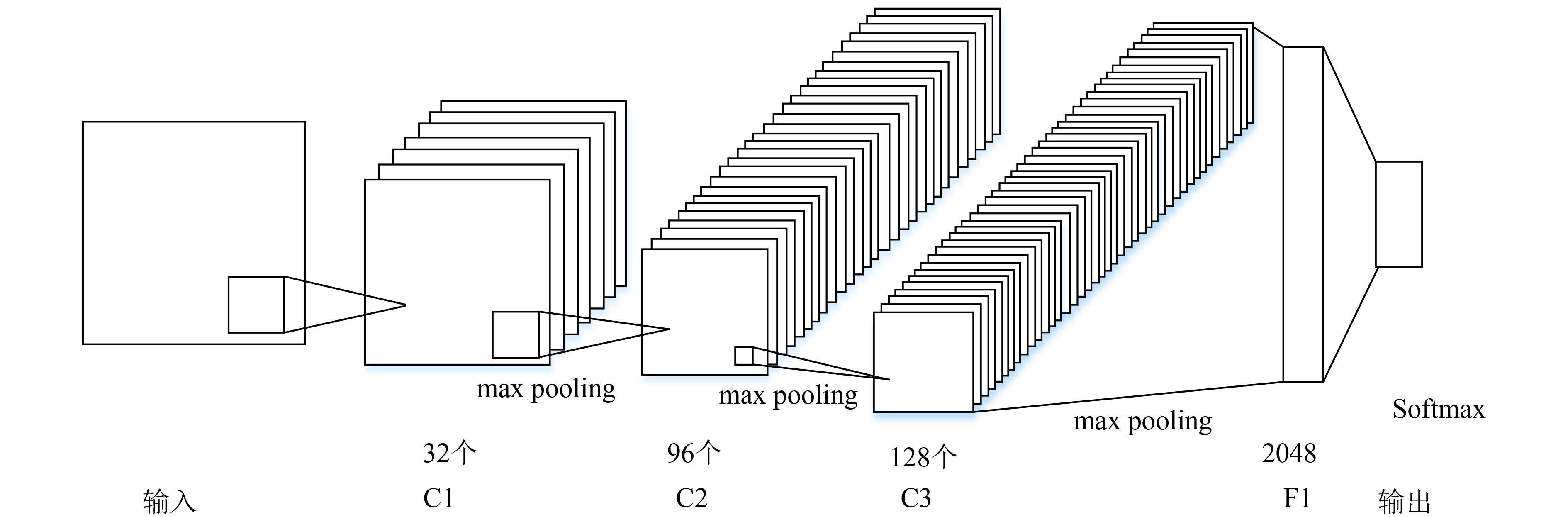
本文设计了一个5层的卷积神经网络来提取并保存深层特征:输入图像的大小为256×256×3;网络的第1层C1由32个11×11×3大小的卷积核组成,由ReLU函数激活,再经max pooling输出;第2层C2由96个5×5×32大小的卷积核组成,由ReLU激活,再经max pooling输出;第3层C3由128个3×3×96大小的卷积核组成,由ReLU函数激活,再经max pooling输出;第4层F1是全连接层,有2048个单元;最后的输出层为Softmax层,输出为[1, 0]或[0, 1],分别代表耕地和侵蚀沟两种类别。网络结构示意图如图5所示。该网络的是在Tensorflow框架下搭建的,在一个GPU上进行训练,网络训练次数为50000次,训练结束时网络已收敛,此过程耗时约450 min。图6展示了两类样本经过卷积层输出的一部分特征图像,可以看出CNN能够提取到侵蚀沟的显著特征,与耕地的特征存在明显区别。

3.3 分类识别结果分析
3.3.1 基于浅层特征的识别结果分析
基于浅层特征的分类识别实验分为3组,首先分别将光谱特征和纹理特征单独输入线性SVM分类器中进行训练,再将二者结合输入到线性SVM分类器中进行训练。
以样本总量的10%、20%、30%作为测试数据,分别输入到3个训练好的线性SVM分类器中进行测试。经过多次实验发现,基于光谱特征的识别精度达到了88.7%,基于纹理特征的识别精度稍低,为86.4%,而将二者结合后识别精度达到了91.1%。由此可见,将多种浅层特征结合起来可提高识别的精度。但仅依靠浅层特征很难继续提高识别精度,具有一定的局限性。
3.3.2 基于中层特征的识别结果分析
将提取的中层特征输入到线性SVM分类器中进行训练,再分别以样本总量的10%、20%、30%作为测试数据输入到线性SVM分类器中进行测试。经过多次实验发现,识别精度大大提高,达到了98.5%。由此可见,中层特征比浅层特征能更好的描述图像,但中层特征比较复杂,在设计时需要人工干预和足够的经验支持,某种程度上限制了自动化。
3.3.3 基于深层特征的识别结果分析
分别以样本总量的10%、20%、30%作为测试数据,将其输入训练后获得的稳定网络。经过多次实验发现,利用CNN提取深层特征进行分类识别的精度最高可达到95.5%。虽然比基于中层特征的识别精度略低,但该类方法的巨大优势在于,CNN网络从图像输入到识别结果输出,可以实现“端到端”的自动学习,无需人工设计提取特征,可大大提高图像分类识别的自动化程度。
表 3 基于多层次特征的识别精度
Table 3 The recognition accuracy based on multi-level features
| 特征 | 测试样本(10%) | 测试样本(20%) | 测试样本(30%) | |
| 基于浅
层特征 |
光谱特征 | 0.887(±0.04) | 0.877(±0.03) | 0.883(±0.04) |
| 纹理特征 | 0.864(±0.05) | 0.859(±0.04) | 0.862(±0.03) | |
| 光谱+纹理特征 | 0.909(±0.04) | 0.911(±0.03) | 0.902(±0.02) | |
| 基于中层特征 | 0.968(±0.01) | 0.973(±0.01) | 0.985(±0.02) | |
| 基于深层特征 | 0.910(±0.01) | 0.955(±0.05) | 0.902(±0.04) | |
3.3.4 实例分析
为验证方法的适用性,选取了3块典型实验区,用本文的方法对3个区域的侵蚀沟进行识别,得到的结果如图7、8、9所示,图中被判别为耕地的呈灰色,被判别为侵蚀沟的呈绿色。在基于浅层特征的识别结果中,针对3幅验证影像的识别精度为78.6%、81.3%和79.2%,对侵蚀沟的识别能力较低,达不到预期效果;基于中层特征的识别精度分别为90.5%、92.5%和91.7%,中层特征对侵蚀沟的识别能力最高;基于深层特征的识别精度为88.1%、90.0%和87.5%,深层特征对侵蚀沟的识别能力较高,同样能达到预期效果。
综合3组实验分析发现:第1块实验区内组成成分较为纯净,侵蚀沟发育不剧烈,耕地受侵蚀程度较轻,在这种情况下,浅层特征很难将侵蚀沟完整识别出来,而中层特征和深层特征的识别效果都较理想;第2块实验区内的侵蚀沟发育剧烈、特征明显,耕地受侵蚀程度严重,在这种情况下,3种方法均能比较完整的将侵蚀沟识别出来;第3块实验区与第2块实验区相似,但该实验区内的组成成分比较复杂,包含少量其他地物,耕地稍显破碎,在这种情况下,3种方法虽均能够将侵蚀沟大致识别出来,但在一定程度上受到了干扰。



4 结 论
通过本文的研究表明:浅层特征对图像的描述能力较低,识别精度不高,但综合多个浅层特征可以获得比单一特征更好的效果。而相比于浅层特征,中层特征和深层特征在描述图像方面的能力更强,基于中层特征和深层特征的识别精度也更高。在测试中,基于深层特征的识别精度可达到95.5%,虽略低于基于中层特征的识别精度98.5%,但深层特征无需人工设计,而是利用CNN自动提取,实现“端到端”的自动学习,因此基于深层特征的识别方法自动化程度更高。
在侵蚀沟识别的实际应用中发现,浅层特征的优势在于简单、计算少、耗时低,但对侵蚀沟的描述能力不强,识别精度不高,仅依靠浅层特征很难将侵蚀沟完整地识别出来,无法满足要求。基于中层特征和深层特征的识别方法虽然在前期训练阶段耗时较长,但实际应用时基本能够将侵蚀沟完全识别出来,尤其是基于深层特征的识别方法,借助CNN可以实现侵蚀沟的自动识别。
总体来说,本文的研究结果符合预期效果,但仍有几个值得注意的地方:
(1) 3种方法相对于测试阶段,识别精度均有所降低,原因在于选取的训练样本纯净度很高,而实际应用中会存在其他地物的干扰,如包含田间小路的耕地容易被误分为侵蚀沟,在一定程度上限制了识别的精度。这也反映了识别精度的提高依赖于训练样本的大容量和多样化。
(2) 在利用深度学习方法进行侵蚀沟影像识别的过程中,发现该方法具有一定的优势,但同时也面临着一些问题。在深度学习中,网络层数越多,得到的特征越抽象,描述图像的能力越强,但多层网络需要大量的样本来训练,在本文的研究中存在小样本的问题,因此选择了较少层数的CNN网络。但同时也说明,深度学习在遥感影像识别中还具有非常大的潜力,若继续增加样本容量,扩大网络结构,能够获得更深层次的特征,对侵蚀沟影像的识别精度也可获得进一步提高。
(3) 本文使用的Google Earth遥感影像包含R、G、B3个波段,在此基础上取得了较为理想的结果。由此可将该方法推广至其他遥感影像的应用中,增加波段数量,扩充特征维数,预期能获得更高的识别精度。
综上所述,在今后的研究中需重点考虑增加样本的数量和多样性,同时进一步改进方法,提高其适用性,挖掘更大的潜力。
参考文献(References)
-
Blaschke T and Strobl J. 2001. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. GIS Zeitschrift für Geoinformationssysteme, 6 (1): 12–17.
-
Chen L J, Yang W, Xu K and Xu T. 2011. Evaluation of local features for scene classification using VHR satellite images//Proceedings of 2011 Joint Urban Remote Sensing Event. Munich, Germany: IEEE: 385–388 [DOI: 10.1109/JURSE.2011.5764800]
-
Cheng Y Q and Zhang P Y. 2005. Regional patterns changes of Chinese grain production and response of commodity grain base in northeast China. Scientia Geographica Sinica, 25 (5): 513–520. [DOI: 10.3969/j.issn.1000-0690.2005.05.001] ( 程叶青, 张平宇. 2005. 中国粮食生产的区域格局变化及东北商品粮基地的响应. 地理科学, 25 (5): 513–520. [DOI: 10.3969/j.issn.1000-0690.2005.05.001] )
-
Fan H M, Wang T L, Cai Q G, Guo C J, Wu M and Zhou L L. 2007. Gully erosion developing model in the gentle hilly black soil regions in Northeast China. Research of Soil and Water Conservation, 14 (6): 384–387. ( 范昊明, 王铁良, 蔡强国, 郭成久, 武敏, 周丽丽. 2007. 东北黑土漫岗区侵蚀沟发展模式研究. 水土保持研究, 14 (6): 384–387. )
-
Gualtieri J A and Chettri S. 2000. Support vector machines for classification of hyperspectral data//IEEE 2000 International Geoscience and Remote Sensing Symposium. Honolulu, HI: IEEE, 2 : 813–815. [DOI: 10.1109/IGARSS.2000.861712]
-
Haralick R M, Shanmugam K and Dinstein I. 1973. Textural features for image classification. IEEE Transactions on Systems, Man, and Cybernetics, SMC-3 (6): 610–621. [DOI: 10.1109/TSMC.1973.4309314]
-
Krizhevsky A, Sutskever I and Hinton G E. 2012. ImageNet classification with deep convolutional neural networks//Advances in Neural Information Processing Systems. Lake Tahoe: NIPS: 1097–1105
-
Lazebnik S, Schmid C and Ponce J. 2006. Beyond bags of features: spatial pyramid matching for recognizing natural scene categories//Proceedings of 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. New York, NY: IEEE: 2169–2178 [DOI: 10.1109/CVPR.2006.68]
-
Li X W and Lin P. 2001. The theoretical basis and progress: utility and protection of the farmer-land in foreign and home. Progress in Geography, 20 (4): 305–312. [DOI: 10.3969/j.issn.1007-6301.2001.04.002] ( 李宪文, 林培. 2001. 国内外耕地利用与保护的理论基础及其进展. 地理科学进展, 20 (4): 305–312. [DOI: 10.3969/j.issn.1007-6301.2001.04.002] )
-
Lowe D G. 2004. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 60 (2): 91–110. [DOI: 10.1023/B:VISI.0000029664.99615.94]
-
Luo B, Jiang S J and Zhang L P. 2013. Indexing of remote sensing images with different resolutions by multiple features. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6 (4): 1899–1912. [DOI: 10.1109/JSTARS.2012.2228254]
-
McInnes J, Vigiak O and Roberts A M. 2011. Using Google earth to map gully extent in the west Gippsland region (Victoria, Australia)//Proceedings of the 19th International Congress on Modelling and Simulation. Perth, Australia: MODSIM: 3370–3376
-
Metternicht G I and Zinck J A. 1998. Evaluating the information content of JERS-1 SAR and Landsat TM data for discrimination of soil erosion features. ISPRS Journal of Photogrammetry and Remote Sensing, 53 (3): 143–153. [DOI: 10.1016/S0924-2716(98)00004-5]
-
Shruthi R B V, Kerle N and Jetten V. 2011. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology, 134 (3/4): 260–268. [DOI: 10.1016/j.geomorph.2011.07.003]
-
Simonyan K and Zisserman A. 2014. Very deep convolutional networks for large-scale image recognition. arXiv preprint arXiv: 1409.1556
-
Szegedy C, Liu W, Jia Y Q, Sermanet P, Reed S, Anguelov D, Erhan D, Vanhoucke V and Rabinovich A. 2015. Going deeper with convolutions//Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA: IEEE: 1–9 [DOI: 10.1109/CVPR.2015.7298594]
-
Xia G S, Hu J W, Hu F, Shi B G, Bai X, Zhong Y F and Zhang L P. 2016. AID: a benchmark data set for performance evaluation of aerial scene classification. IEEE Transactions on Geoscience and Remote Sensing, 55 (7): 3965–3981. [DOI: 10.1109/TGRS.2017.2685945]
-
Yan Y C, Zhang S W, Li X Y, and Yue S P. 2005. Temporal and spatial variation of erosion gullies in Kebai black soil region of Heilongjiang during the past 50 years. Acta Geographica Sinica, 60 (6): 1015–1020. [DOI: 10.11821/xb200506015] ( 闫业超, 张树文, 李晓燕, 岳书平. 2005. 黑龙江克拜黑土区50多年来侵蚀沟时空变化. 地理学报, 60 (6): 1015–1020. [DOI: 10.11821/xb200506015] )
-
Yan Y C, Zhang S W and Yue S P. 2007. Classification of erosion gullies by remote sensing and spatial pattern analysis in black soil region of eastern Kebai. Scientia Geographica Sinica, 27 (2): 193–199. [DOI: 10.3969/j.issn.1000-0690.2007.02.012] ( 闫业超, 张树文, 岳书平. 2007. 克拜东部黑土区侵蚀沟遥感分类与空间格局分析. 地理科学, 27 (2): 193–199. [DOI: 10.3969/j.issn.1000-0690.2007.02.012] )
-
Yang Y and Newsam S. 2010. Bag-of-visual-words and spatial extensions for land-use classification//Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems. San Jose, California: ACM: 270–279 [DOI: 10.1145/1869790.1869829]
-
Yu K, Yang J C and Gong Y H. 2013. Linear Spatial Pyramid Matching Using Sparse Coding. US, US8374442B2.


