


|
收稿日期: 2016-10-28; 优先数字出版日期: 2017-09-01
基金项目: 国家自然科学基金(编号:41571331);高分辨率对地观测系统重大专项(编号:GFZX0404080102)
第一作者简介: 潘一凡(1989— ),男,博士研究生,研究方向为高光谱遥感、机器学习及LiDAR应用。E-mail:yfpan@pku.edu.cn
通讯作者简介: 张显峰(1967— ),男,副教授,研究方向为生态遥感、高光谱遥感应用。E-mail:xfzhang@pku.edu.cn
中图分类号: U418.6
文献标识码: A
|
摘要
公路路面质量的好坏对行车安全性、舒适性、经济性有重要的影响,因此路面状况的监测对于公路交通的健康发展具有重要意义。遥感技术作为一种新兴的数据采集手段,具有图像覆盖范围大、时效性强、信息客观现实、可重复使用、便于计算机分析等优势,为解决大范围的路面监测问题提供了强有力的支持。本文综述了现有基于遥感技术的道路路面状况监测方法,对其中存在的问题进行了分析和探讨。遥感技术在路面状况监测中具有广泛的应用前景,部分技术已经成熟并在公路养护作业中广泛使用,例如路面监测管理系统、探地雷达等;但是仍有部分技术还存在着鲁棒性差、精度较低等问题,还需要进一步的研究探索,如路面光谱分析、基于机载和星载的路面状况遥感监测应用的适用性等。本文最后给出了一种基于多端元混合像元分解模型的沥青路面老化状况监测与评估方法的研究实例。实验结果证明该方法可有效区分沥青公路路面混合像元中不同老化状况的沥青路面,为大范围路面老化状况监测提供了一种技术途径。
关键词
路面状况, 遥感监测, 研究现状, 问题分析
Abstract
Roads are greatly essential in a transportation system. The quality of road pavements has a crucial impact on the driving safety, comfort, and the cost of the roads. Therefore, timely monitoring the pavement conditions to guarantee the secure operation of the traffic system is significant. Currently, time-consuming field investigations and manual measurements are the conventional and main methods to detect and evaluate the pavement conditions. However, many of these methods are destructive to the road surface. Many forms of remote sensing data without destructive effect on pavement were introduced with the support of computer technology and remote sensing to detect pavement conditions, such as digital images, LiDAR, and Radar. This paper reviewed the current research status and problems in pavement condition detection based on remote sensing technologies. Remote sensing, as a non-intrusive method, has the advantages of wide spatial coverage and objective and repeatable data with high temporal resolution that can be analyzed by computer conveniently. Generally, the methods can be divided into four types, namely, the multi-/hyper-remote sensing, the thermal remote sensing, the microwave remote sensing, and three dimensional reconstructionbased on the categories of the sensors used in pavement monitoring. The multi-/hyper- remote sensing primarily utilizes the reflective spectral information of the pavement, which contains three specific methods, namely, image processing method, the method based on the variation of pavement brightness, and spectral modeling. The thermal remote sensing is based on the radiation characteristics of pavement, which contains two methods based on the variation of pavement temperature and emissivity information. A microwave device called Ground Penetrating Radar (GPR) has been widely used to detect the pavement defects by road departments. The three dimensional information of the road surface can be acquired using photogrammetry and LiDAR systems to measure the elevation information of the deteriorated pavement. An experiment using the Multiple Endmember Spectral Mixing Analysis (MESMA) and WorldView-2 satellite image was conducted to evaluate the potential of remote sensing in aging pavement monitoring. Results show that all methods are greatly potential in pavement condition monitoring. However, these methods still have some limitations in terms of complexity, accuracy, and robustness. High resolution remote sensing technologies, such as sub-meter satellite data and low-altitude UAV systems, can achieve large-range and rapid detection of the road pavement conditions in question. The results of the case study in Liangxiang area of Beijing show that the road pavement aging conditions could be detected appropriately and mapped with higher accordance with the practical pavement conditions. Therefore, some ground remote sensing methods have been applied successfully in pavement condition detection, such as the Pavement Management Systems (PMS), GPR, and so on. However, spaceborne and airborne remote sensing methods still encounter problems (poor robustness and low accuracy etc.)on pavement condition detection. For instance, the applicability of pavement spectral analysis and airborne or satellite data in pavement condition detection applications still require additional future works. Finally, a case study using satellite multispectral data to monitor asphalt pavement aging conditions is presented to demonstrate the usefulness of remote sensing technology in road pavement monitoring and assessment.
Key words
pavement condition, remote sensing monitoring, research status, problem analysis
1 引 言
公路路面在实际运营过程中,由于温度、水分、风化以及荷载等因素的影响,路面结构强度会逐渐降低,最终导致道路表面产生多种病害特征(如裂缝、坑槽、车辙等)(Pan 等,2016),极大地降低了路面的使用性能,同时也带来巨大的经济损失和事故风险。因此,路面状况的快速调查和检测对于公路交通的安全稳定运行具有重要的意义。公路发展初期,路面状况的调查主要通过道路养护人员利用仪器手动测量进行,例如:利用自动或落锤式弯沉仪测量路面强度;利用连续式平整度仪或3米直尺检测路面平整度;利用横向力摆式仪测定抗滑能力等(中华人民共和国交通部,2001)。但手动检测方法效率较低而且对路面具有破坏性。随着计算机和传感器技术的发展,一些先进传感器和其他设备被用于路面状况检测,如激光测量器、图像采集系统、探地雷达、多光谱/高光谱相机、LiDAR等,能实时获得路面状况信息并进行定性诊断和定量评价分析,为科学化的养护决策提供支持(Themistocleous 等,2014;Cline 等,2003;Uddin,2011)。此外,随着对地观测技术尤其是高分对地观测技术的迅速发展,机载或星载遥感技术因其更具有宏观性、现势性、客观性等特点,在路面状况检测应用中也具有较大的应用潜力(Zhang和Bougus,2014;Schnebele 等,2015;Mettas 等,2015;Jin,2011)。
路面状况遥感监测的基本原理是首先利用传感器获取路面表层反射或发射的电磁波信息,然后对电磁波信息进行特征提取并量化,最后基于数学或物理模型转化为路面状况参数信息。不同制造工艺、制作材料的道路路面具有不同的电磁波特征信息。目前存在的路面类型主要有:沥青路面、水泥路面、砂石路面和未铺设路面(表1)。随着中国公路里程的增加,路面的养护管理工作日益繁重,迫切需要探索新的大范围公路路面监测手段,对路面无破坏性的遥感技术提供了一种新的技术途径。本文对当前基于遥感技术的路面状况监测平台与方法进行了评述,对其存在的问题进行初步分析,提出了今后路面状况遥感监测潜在的研究方向。
表 1 公路路面类型及其主要病害类型和分布范围(中华人民共和国交通部,2007)
Table 1 Primary pavement types and corresponding distresses and distribution (Ministry of Communications of the PRC, 2007)
| 路面类型 | 路面材料 | 主要病害类型 | 主要分布范围 |
| 沥青路面(柔性路面) | 沥青混凝土 | 龟裂、裂缝、坑槽、松散、车辙 | 国道、省道、城市道路 |
| 水泥路面(刚性路面) | 水泥混凝土 | 裂缝、破碎板、板角断裂、错台与坑洞 | 县道、乡道、城市道路 |
| 砂石路面 | 砂子与岩石 | 沉陷、波浪搓板、车辙、坑槽 | 村道 |
| 未铺设路面 | 裸土 | 车辙、坑槽 | 村道 |
2 公路路面遥感监测平台与系统概况
2.1 车载路面监测管理系统
车载路面监测管理系统PMS(Pavement Management System)综合运用计算机技术、道路工程理论、工程经济分析、系统工程技术等对公路路面进行养护管理。PMS可搭载地理信息系统、全球定位系统、激光测量器、图像采集系统、里程计、探地雷达、激光雷达等先进传感器和设备,通过采集路线名称、技术等级、里程、宽度、基层类型、修建年月等路面基本属性数据以及交通量、路面破损、弯沉、平整度、抗滑指数等路面状况数据,能即时获取路面的各项技术状况评价指标,对路面状况进行综合评价分析,并提出养护措施建议和优先次序,进行项目级资金分析,为修订养护策略、调整资金投向及领导决策提供参考(Cline 等,2003;Schnebele 等,2015;Themistocleous 等,2014)。近年来较知名的车载路面状况快速检测系统如表2。
表 2 知名的车载路面状况快速检测系统
Table 2 Well-known pavement management systems in the world
| 系统 | 制造商 | 国家 | 集成设备 | 分辨率/mm | 允许最大车速/(km/h) | 检测宽度/m |
| HARRIS2 | TRL/HA | 英国 | SIS, GPS, LRMS, IMU, LiDAR, 等 | 2 | 80 | 2.9 |
| PAVUE | Ramboll | 瑞典 | SIS, LRMS, GPS, etc. | 2 | 90 | 3.2 |
| RAVs | WDM ltd | 英国 | VIS, GPS, 等 | 2 | 100 | 3.2 |
| ARAN | Roadware | 加拿大 | SIS, GPS, LRMS, GPR, LiDAR, VIS, GIS,等 | 3 | 80 | 4.0 |
| PathRunner | Pathway Services Inc | 美国 | SIS, LRMS, GPS, GPR, GIS, 等 | 2 | 112 | 4.0 |
| RoadCrack | CRISO | 澳大利亚 | SIS, VIS, GPS, 等 | 1 | 100 | 2.9 |
| DHDV | University of Arkansas | 美国 | SIS, GPS, LRMS, GPR, LiDAR, GIS等 | 1 | 90 | 3.5 |
| CiCS | 交通部公路科学研究院 | 中国 | SIS, GPS, LRMS, GPR, VIS, GIS等 | 1 | 100 | 2.6-3.6 |
| ZOYON-RTM | ZOYON公司 | 中国 | SIS, GPS, GPR, VIS, GIS等 | 1 | 120 | 4 |
| CT-501A | 长安大学 | 中国 | VIS, GPS, LiDAR, 等 | 1 | 100 | 3.75 |
| 注:VIS: 视频成像系统(video imaging system);SIS: 路面成像系统(surface imaging system);IMU: 里程 (inertial measurement unit);GPS: 全球定位系统(global position system);GIS: 地理信息系统(geographic information system) ;LRMS: 激光车辙测量系统 (laser rut measurement system);LiDAR: 激光雷达系统(light detection and ranging)。 | ||||||
2.2 无人机/有人机航空遥感平台
车载路面状况检测系统已基本成熟,但也存在一定的不足,如:妨碍交通、花费高、耗时、耗力等,而且对于路线较长的公路段只能进行抽样调查无法快速、周期性获得全路段的路面状况信息(Pan 等,2016)。近年来,随着航空航天技术的发展,载有多种载荷,如:可见光数码相机、多光谱或高光谱相机、LiDAR等的航空遥感系统开始被应用于地面观测,单独挂载或综合挂载,辅以高精度导航系统和控制系统,可获取高精度的路面状况空间分布信息,为解决大范围的路面管理问题提供了强有力的支持(Themistocleous 等,2014)。但是,道路监测对观测数据的空间分辨率要求很高,因此利用航空航天遥感技术监测路面状况信息首先需要获取超高空间分辨率(如:优于0.5 m)的遥感数据。依靠价格低廉、易于操作的无人机UAV(Unmanned Aerial Vehicle)平台可获得超高空间分辨率的路面遥感数据,尤其道路呈线性延伸,实际覆盖面积较小,所以在路面状况遥感监测应用中具有特有的优势(Branco和Segantine,2015;Feng 等,2009;Zhang和Elaksher,2012)。
2.3 卫星遥感平台
随着卫星遥感技术的发展,卫星遥感数据的空间分辨率不断提高,如中国最新发射的高分二号(GF-2)卫星以及国外最新发射的Wordview-3等(表3)。GF-2卫星可提供星下1 m全色数据和4 m多光谱数据;Worldview-3卫星能获得0.31 m的全色数据和1.24 m的多光谱数据,通过数据融合技术可获得多光谱高空间分辨率的路面遥感数据,因此基于星载遥感数据即可大范围获取路面的老化状况及病害特征信息,进一步提高路面状况调查的效率。如Pan等人(2016)利用Wordview-2路面多光谱影像对北京市房山区的沥青路面老化状况成功制图;Emery等人(2014)利用直方图阈值分割法对Wordview-2道路全色影像分类得到不同老化状况的沥青路面;Mei等人(2014)利用IKONOS和QuickBird多光谱卫星遥感影像监测机场和城区沥青道路健康状况。
表 3 高空间分辨率卫星载荷参数
Table 3 Parameters of satellite sensors with high spatial resolution
| 卫星/传感器 | 全色空间分辨率/m | 多光谱空间分辨率/m | 多光谱波段数 |
| IKONOS | 1 | 4 | 4 |
| QuickBird | 0.61 | 2.44 | 4 |
| Geoeye-1 | 0.41 | 1.65 | 4 |
| WorldView-1 | 0.45 | 无 | 无 |
| WorldView-2 | 0.5 | 1.8 | 8 |
| WorldView-3 | 0.31 | 1.24 | 16 |
| Pleiades-1A&1B | 0.5 | 2 | 4 |
| SPOT 6/SPOT 7 | 1.5 | 6 | 4 |
| SkySat-1/SkySat-2 | 0.9 | 2 | 4 |
| GF-2 | 1 | 4 | 4 |
3 公路路面状况遥感监测模型与方法
根据路面状况监测中所使用传感器的不同,可将基于遥感技术的路面状况监测方法分为四类:多光谱/高光谱遥感方法、热红外遥感方法、微波遥感方法和3维重建空间技术(表4)。
3.1 多光谱/高光谱遥感监测方法
3.1.1 图像处理与识别法
图像处理与识别法主要应用于高空间分辨率路面影像提取路面病害信息,基本流程主要包括(图1):路面图像采集、图像预处理、病害特征提取、病害识别、路面损害评价。路面图像采集指利用CCD相机、多光谱或高光谱相机获取高空间分辨率的路面图像。由于路面状况复杂,路面破损图像易受到路面上一些噪声(如杂物、沙石、轮胎痕迹、油迹等)的影响,因此首先需要对路面破损图像进行预处理去除路面噪声。常用的方法有边缘增强、频域滤波、直方图变换,形态学处理等(Chambon和Moliard,2011;彭博 等,2014)。病害特征提取是将病害目标特征用数据或公式来定量描述,常见的病害目标特征有:灰度特征、纹理特征和几何形状特征等,如裂缝的灰度和长度、龟裂的形状和纹理、坑槽的曲率和面积等。然后,基于提取的路面病害特征利用监督或非监督分类器对路面破损类型分类识别,常用的分类器有贝叶斯、神经网络、支持向量机、随机森林等(Saar和Talvik,2010;Mokhtari 等,2016;Mokhtari,2015)。最后,将提取的路面病害信息转化为路面状况指数PCI(Pavement Condition Index)对路面破损状况综合评价。PCI与路面破损类型和破损严重程度有关,破损严重程度可通过统计病害的几何特征信息进行描述,如裂缝长度和密度,坑槽数量及大小,车辙长度及宽度等。PCI计算公式如下
|
$PCI = 100 - {a_0}D{R^{{a_1}}}$
|
(1) |
|
$DR = 100 \times \sum\limits_{i = 1}^{{i_0}} {\frac{{{\omega _i}{A_i}}}{A}} $
|
(2) |
式中,DR为路面破损率(pavement distress ratio),是各种病害的折合损坏面积之和与路面调查面积之百分比(%);Ai为第i类路面病害损坏的面积(m2);A为调查的路面面积(调查长度与有效路面宽度之积,m2);ωi为第i类路面病害损坏的权重,不同路面类型取值不同,具体可参考《公路技术状况评定标准》(JTG H20)(中华人民共和国交通部,2007);模型参数a0对于沥青路面采用15.00,水泥路面采用10.66,砂石路面采用10.10;模型参数a1对于沥青路面采用0.412,水泥路面采用0.461,砂石路面采用0.487;i为考虑损坏程度(轻、中、重)的第i项路面损坏类型;i0为包含损坏程度(轻、中、重)的损坏类型总数,沥青路面取21,水泥路面取20,砂石路面取6。
表 4 文献中的路面健康状况遥感模型方法
Table 4 Pavement condition detection methods based on remote sensing in references
| 类别 | 方法名称 | 方法简介 | 主要监测指标 | 主要监测平台 | 相关文献 |
| 多光谱/高光谱遥感 (短波波段) | 图像处理与识别法 | 基于图像处理算法提取路面病害特征 | 裂缝长度及密度、坑槽面积 | 车载 | (Huang和Xu,2006;Chambon和Moliard,2011;Jitprasithsiri,1997;Mokhtari,2015) |
| 亮度变化法 | 基于路面在影像上的亮度变化对路面状况进行分类评价 | 路面老化综合指标,如PCI | 机载、星载 | (Mohammadi,2012;Emery 等,2014;Mei 等,2014) | |
| 反射率光谱建模法 | 建立路面反射光谱特征参量与路面技术状况评价指标之间的数学模型对路面状况进行评价 | 路面老化综合指标,如PCI | 机载 | (Herold和Roberts,2005;Herold 等,2004, 2008;Manzo 等,2014;Mei 等,2014;Noronha 等,2002) | |
| 热红外遥感 (中波波段) | 温度变化法 | 基于路面在热红外影像中的温度变化对路面状况进行评价 | 路面老化综合指标(PCI等)、裂缝长度及密度、坑槽面积 | 车载,机载,星载 | (Jemison 等,1992;Moropoulou 等,2001) |
| 比辐射率光谱建模法 | 建立路面比辐射率光谱特征参量与路面状况指数之间的数学模型对路面状况进行评价 | 路面老化综合指标,如PCI | 车载,机载,星载 | (Kotthaus 等,2014;Pascucci 等,2008) | |
| 微波遥感 (长波波段) | 探地雷达 | 基于探地雷达接收到的电磁波波形、振幅变化情况检测路面状况信息 | 路面厚度、路面沉降、坑洞检测 | 车载 | (Jol,2008;Loizos和Plati,2007;甘露 等,2008) |
| 三维重建空间技术 | 数字摄影测量法 | 利用摄影测量方法建立路面三维模型提取路面病害特征 | 车辙宽度及深度、裂缝深度、坑槽深度 | 车载、机载 | (Kertész 等,2008;Ahmed 等,2011;Tiong 等,2012;Zhang和Elaksher,2012) |
| LiDAR | 利用LiDAR技术提取路面高程信息或建立路面三维模型提取路面病害特征 | 车辙宽度及深度、裂缝深度、坑槽深度、路面平整度 | 车载,机载 | (Paska,2009;Jin,2011;Uddin,2011;Puente 等,2013;Uddin和Al-Turk,2001) |


3.1.2 路面亮度变化法
实际运营中,受多种因素(材料、环境)的影响,公路路面质量逐渐发生退化,导致路面亮度在遥感影像中不断发生变化。如沥青路面,随着使用年限的增加,路面沥青含量逐渐减少,导致路面反射率逐渐增加,在影像中表现为亮度逐渐增大。相反,水泥路面亮度则会逐渐降低。基于路面亮度特征的变化规律,可对不同老化状况的沥青或水泥路面进行宏观监测评价。如,Emery等人(2014)基于Worldview-2全色波段高空间分辨率路面影像研究发现,不同老化状况的沥青路面在影像直方图中的亮度值分布不同,通过选取合适阈值对影像分割即可对沥青路面健康状况进行分类提取。Mei等人(2014)根据沥青路面的亮度值变化规律和Munsell灰度色卡的标准亮度等级(1—8)将不同健康状况的沥青路面进行定量分级(1—2,3—4,5—6,7—8),并基于光谱角监督分类的方法对机场跑道、停车场等沥青路面状况空间分布成功制图(Pan 等,2016)。根据分类结果即可统计得出不同路段不同状况路面所占面积比例用于道路养护决策和分析。
3.1.3 反射率光谱建模法
地物反射率光谱特征与其物理化学性质密切相关(童庆禧 等,2006)。沥青和水泥混凝土材料中含有多种矿物质成分,随着路面质量逐渐退化,路面混凝土材料成分和含量发生改变,致使路面光谱发生变化,基于不同健康状况路面在相同波段具有不同的光谱响应特征可对路面状况进行高光谱遥感监测(Gomez,2002;Herold和Roberts,2005;Mei 等,2012)。图2为不同老化阶段沥青路面样本的光谱曲线及其对应的数码照片。图2所示沥青路面样本从左至右,从上至下,老化程度依次增加。其中,P1,P2,P3为老化初期沥青路面样本(P1为新沥青混合材料,P2和P3为轻度老化沥青路面),其光谱反射率在0.35—2.5 μm谱段内普遍较低(小于10%),在1.72 μm和2.3 μm处存在2个与沥青材料相关的碳氢化合物光谱吸收特征。该阶段中,由于挥发、氧化、吸收和光化学反应的影响,路面中沥青材料含量逐渐减少,导致沥青路面变脆;M1,M2,M3为中期老化沥青路面样本,该阶段中的路面沥青含量继续减少,导致在1.72 μm和2.3 μm处的碳氢化合物光谱吸收特征逐渐消失,同时受到车辆载荷的摩擦损坏,沥青混合材料中的砂石骨料逐渐暴露出路面,使得路面光谱反射率逐渐升高,并且在2.33 μm处出现了矿物光谱吸收特征。在可见光和近红外区间沥青路面光谱曲线斜率逐渐升高;H1,H2,H3为老化后期沥青路面样本,由于车辆载荷的持续摩擦搌压,暴露出的砂石骨料颗粒逐渐变细,使得沥青路面光谱反射率达到最大值(大于20%)。
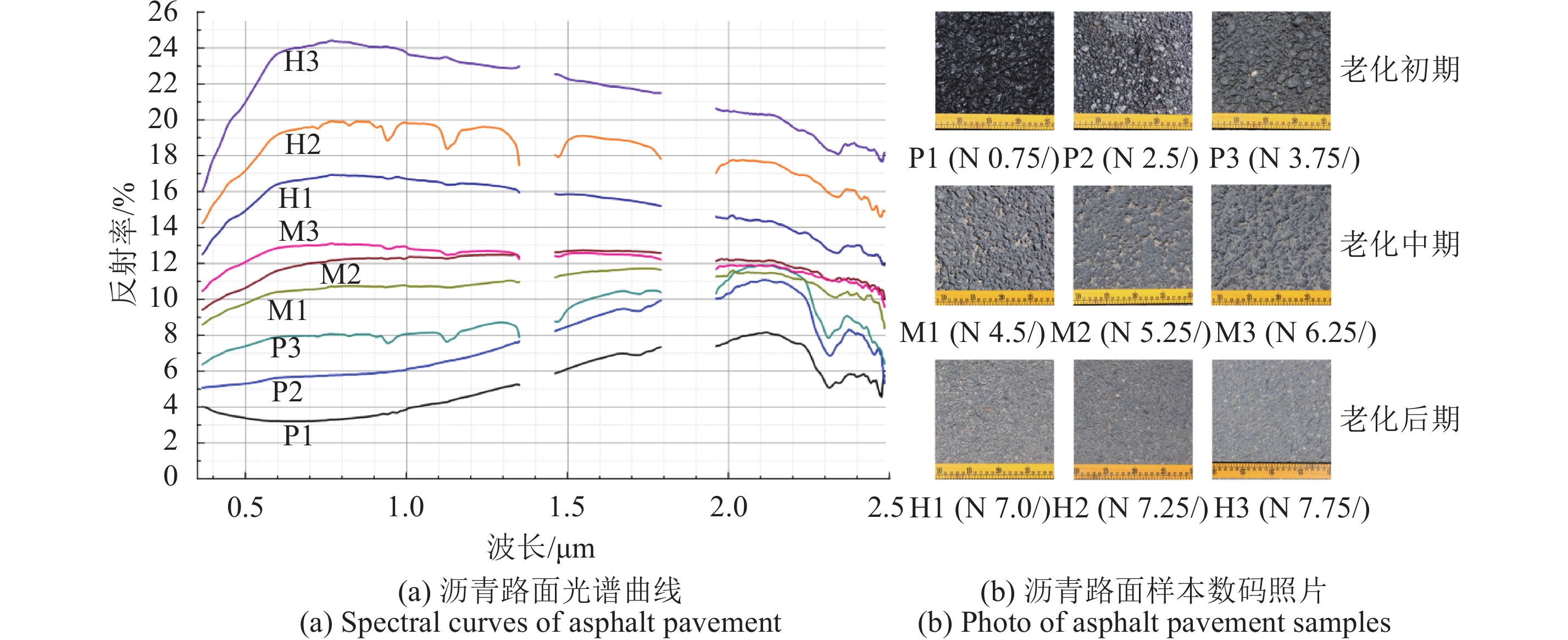
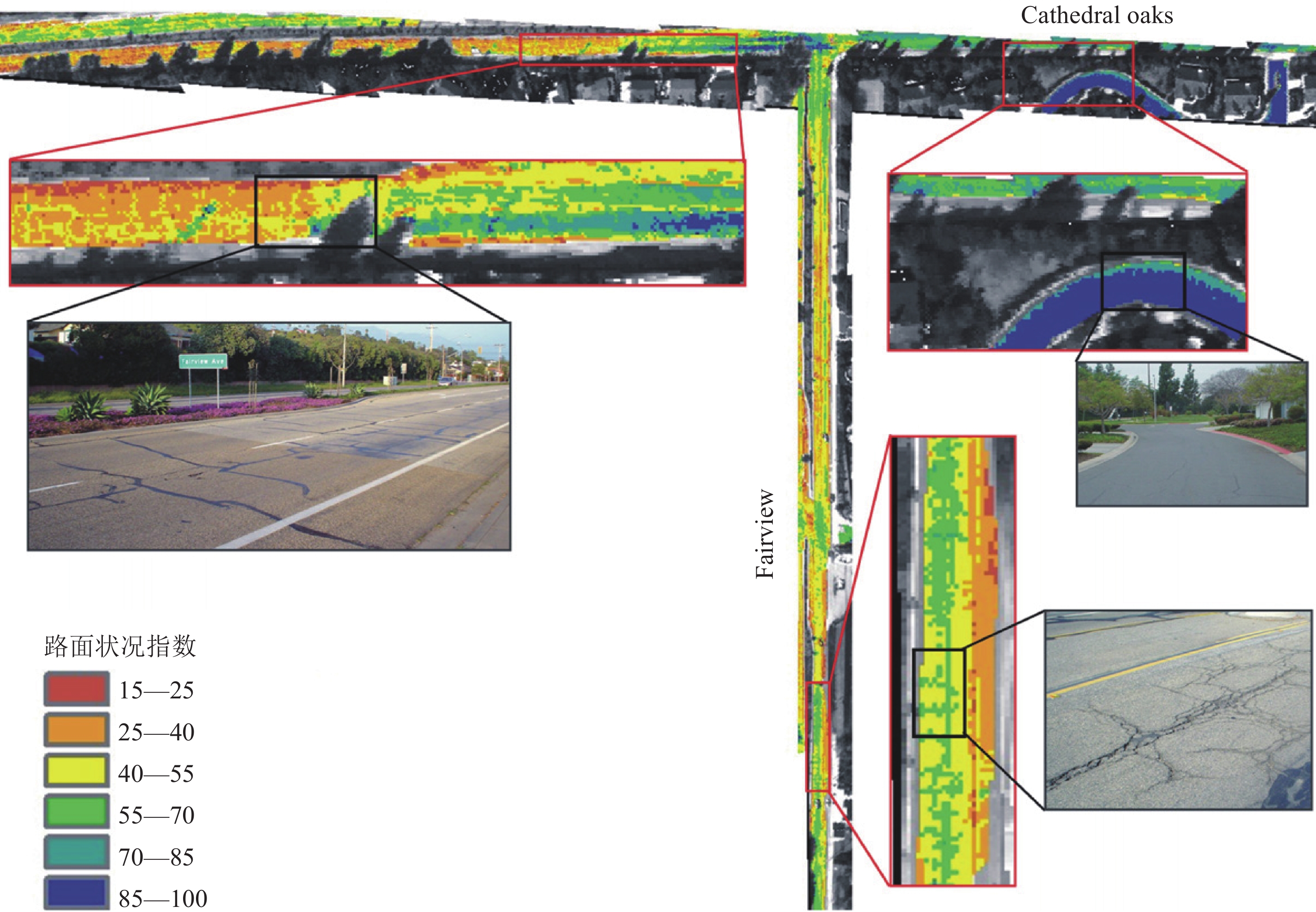
在可见光和近红外区间沥青路面光谱曲线斜率进一步增加,并且在0.52 μm、0.76 μm和0.87 μm处出现了铁氧化物的光谱吸收特征,在2.33 μm处出现了明显的矿物光谱吸收特征。经过3个老化阶段,沥青路面的变形能力和结构强度逐渐降低,最终产生一系列的路面病害,例如裂缝、车辙、坑槽等(Pan 等,2016)。经光谱分析可知,随着沥青路面老化过程的推进,沥青路面光谱在不同老化阶段存在不同的光谱特征,利用多光谱或高光谱遥感影像,通过构建有效、合理的算法与模型可对沥青路面老化状况进行空间遥感监测和定量评价。如,Herold等人(2008)根据沥青路面光谱在可见光至近红外波段区间的斜率变化特征构建了3个光谱指数模型:光谱差值指数、光谱比值指数和光谱方差指数,然后通过与路面状况指数PCI和路面结构指数SI回归分析构建数学反演模型,最后基于机载AVIRIS高光谱路面影像对路面状况进行了定量评估(表5、图3)。
表 5 Herold的路面健康状况模型(Herold 等,2008)
Table 5 Pavement condition detection models based on pavement spectral features by Herold, et al.(2008)
| 模型名称 | 所用波段 | 公式 | 路面状况指数 | 模型简介 |
| 光谱差值指数 | 490 nm和830 nm |
|
PCI | 基于旧路面在可见光区域的反射率增大,坡度升高,利用830 nm和490 nm的反射率之差表征坡度变化 |
| 光谱比值指数 | 490 nm和830 nm |
|
PCI | 基于旧路面在可见光区域的反射率增大,坡度升高,利用830 nm和490 nm的反射率之比表征坡度变化 |
| 光谱方差指数 | 490 nm和830 nm |
|
SI | 基于旧路面的结构变化特征(裂缝等),利用830 nm和490 nm的反射率之比的方差纹理特征表征路面的结构变化 |
3.2 热红外遥感方法
3.2.1 温度变化法
随着路面使用年限的增加,路面结构和材料发生改变,致使不同状况路面的热辐射特征具有一定的差异。热红外遥感技术可获取路面的热辐射信息,不同路面病害在热红外影像中具有不同的特征信息(灰度、纹理、几何 等),按照图像处理与识别法(2.1节)的基本流程,基于特征提取和分类器或图像处理算法(如直方图分割法)可对路面病害进行识别和评价(Jemison 等,1992;Moropoulou 等,2001)。此外,晚间正常路面和病害路面由于白天所吸收的太阳辐射不同所表现出的热辐射特征也具有显著的差别,所以基于温度变化法可对路面进行全天时监测。
3.2.2 比辐射率光谱建模法
比辐射率ε又称发射率,即物体在温度T、λ波长处的辐射出射度Ms(T, λ)与同温度、同波长的黑体辐射出射度MB(T, λ)的比值(式(3))。地物比辐射率与地物的组成成分、表面状态(表面粗糙度等)及物理性质(介电常数,含水量等)密切相关,是描述地物理化性质的重要特征参数(赵英时,2003;Kotthaus 等,2014)。
|
$\varepsilon \left( {T,\lambda } \right) = \frac{{{M_{\rm{s}}}\left( {T,\lambda } \right)}}{{{M_{\rm{B}}}\left( {T,\lambda } \right)}}$
|
(3) |
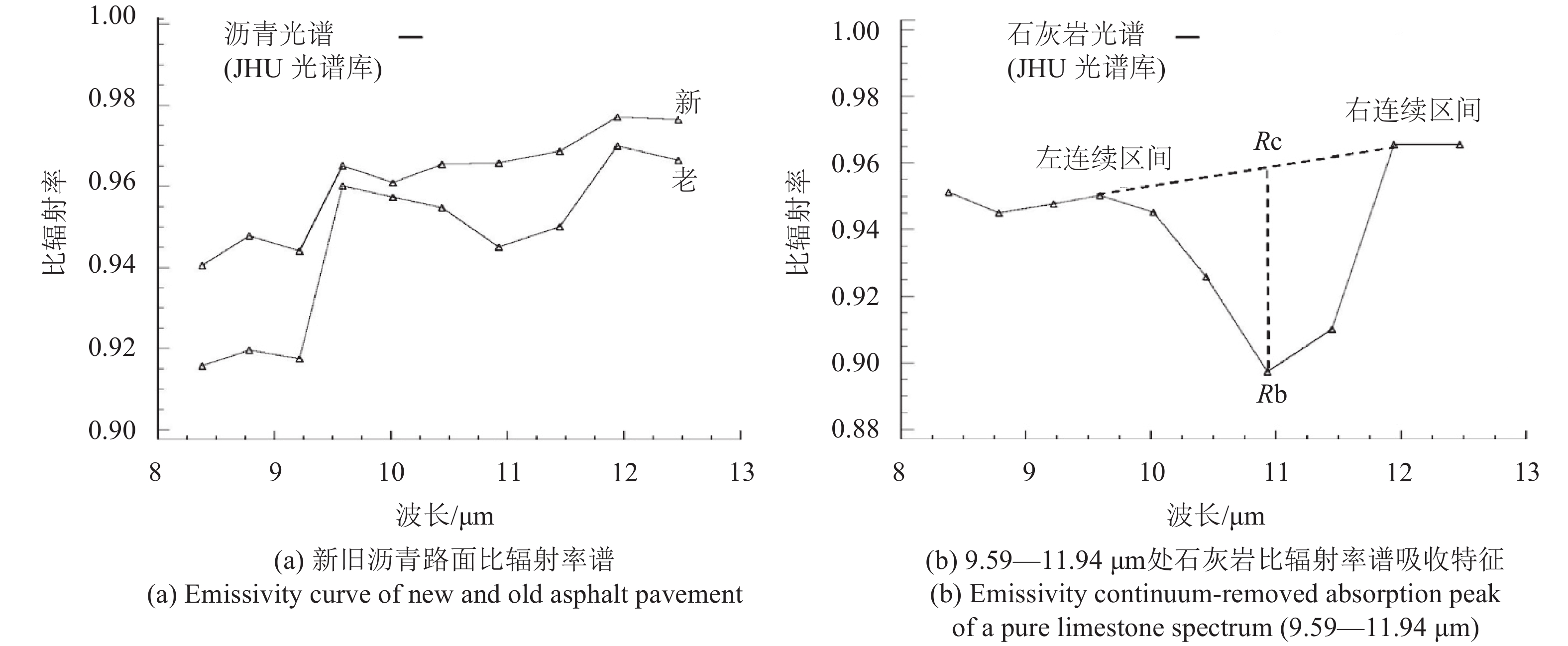
随着路面质量退化,路面粗糙度、路面材料成分将发生改变,致使路面比辐射率谱发生相应变化。图4为新旧沥青路面样本的比辐射率谱,可知随着路面中沥青材料的损耗和岩石骨料的暴露,旧沥青路面在11.2 μm处会呈现一个显著的矿物光谱吸收特征,与纯石灰岩材料(沥青混凝土骨料)的比辐射率光谱特征吻合,而且,随着老化程度增加,该矿物光谱吸收特征会逐渐增强。根据该比辐射率特征变化规律,Pascucci等人(2008)首先利用包络线去除法对11.2 μm处的矿物光谱吸收特征进行增强,然后以其吸收深度D作为光谱特征参量(如式(4)),并基于MIVIS热红外影像反演获取了实验区沥青路面状况空间分布图。
|
$D = 1 - \frac{{{{{R}}_{\rm{b}}}}}{{{{{R}}_{\rm{c}}}}}$
|
(4) |
式中,Rb为吸收峰反射率,Rc为包络线去除后的反射率。
3.3 微波遥感方法
探地雷达GPR(Ground Penetrating Radar)是一种集现代电子技术、信息技术与电磁波技术为一体的高端先进技术设备,它是用频率介于106—109Hz的无线电波来确定地下介质分布的一种无损探测方法(Jol,2008)。GPR向下穿透路面发射高频的电磁波,由接收天线接收到返回路面的电磁波,其电磁波在地下穿越不同的介质层进行反射、折射回波信息,并以一种电性差异进行接收电磁波的波形、振幅变化情况等参数,探测地面以下的构造和形态特征。GPR技术现已广泛用于路面状况监测应用中,如路面厚度检测、路面剖面制图、路面病害和道路路面弯沉检测等(Loizos和Plati,2007)。
探测的雷达图即为道路纵向剖面图,通常以波形或者灰度显示。由于不同基层的介电常数不同,导致电磁波遇到不同界面层的反射回波信息存在着时间差异,所以从图5中可以清晰的分辨出不同道路基层的分界面,进而可对路面厚度进行探测(图5)。

根据测试精度和深度的要求,可以选择不同频率的天线,一般来说,80 MHz天线探测深度为30 m左右,200 MHz天线可高精度、高分辨率检测1.5—3.5 m范围;600 MHz天线能够高精度、高分辨率检测0.3—1.5 m深度范围;2000 MHz极高频率天线能以极高的分辨率检测0—0.3 m的范围,最小可以分辨出2.5 mm厚的层面(甘露 等,2008)。
3.4 3维重建空间分析技术
3.4.1 数字摄影测量法
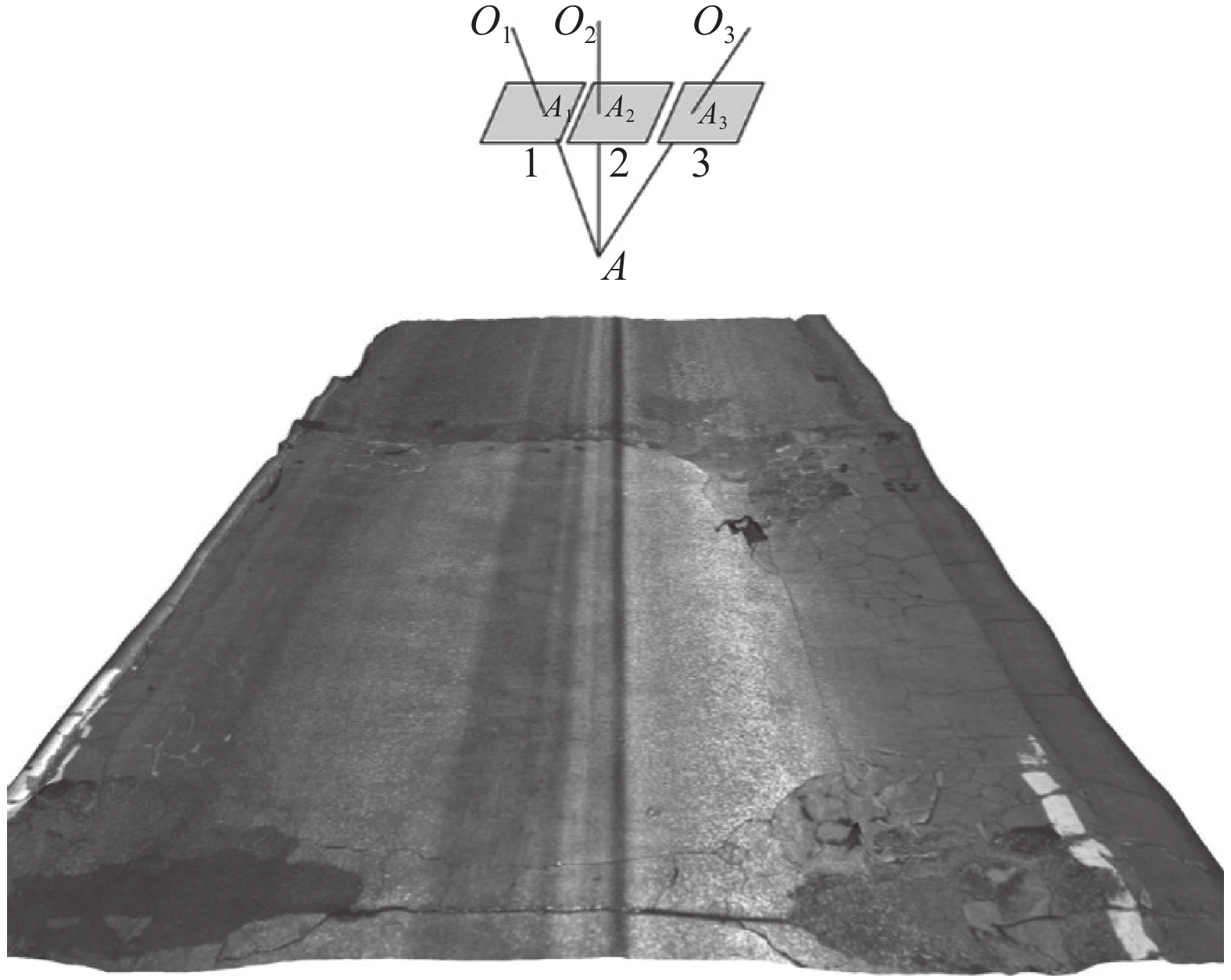
数字摄影测量法是一种集合传统摄影测量和计算机视觉技术用于构建地面3维空间信息的方法,包括近景摄影测量和航空摄影测量,其基本原理是首先对目标物摄取一组具有一定重叠度的数字影像,通过单视点立体像对和多视点立体影像生成3维点云,通过使用共线方程构造从像点到物体点的直线,确定像点的空间坐标X,Y,Z,进而可以得到路面的3维空间表面模型(Zhang和Elaksher,2012;Kertész 等,2008)。如图6中所示,A为地面点,O1、O2、O3为摄影中心,A1、A2、A3为地面点A在不同影像中的像点,通过共线方程即可确定地面点A和像点a1、a2、a3的空间位置,获得像点的3维空间坐标。共线方程公式如下(张剑清 等,2003):
|
$\left\{ {\begin{array}{*{20}{c}}{x - {x_0} = - f\displaystyle\frac{{{a_1}\left( {X - {X_{\rm{s}}}} \right) + {b_1}\left( {Y - {Y_{\rm{s}}}} \right) + {c_1}\left( {Z - {Z_{\rm{s}}}} \right)}}{{{a_3}\left( {X - {X_{\rm{s}}}} \right) + {b_3}\left( {Y - {Y_{\rm{s}}}} \right) + {c_3}\left( {Z - {Z_{\rm{s}}}} \right)}}}\$13pt]{y - {y_0} = - f\displaystyle\frac{{{a_2}\left( {X - {X_{\rm{s}}}} \right) + {b_2}\left( {Y - {Y_{\rm{s}}}} \right) + {c_2}\left( {Z - {Z_{\rm{s}}}} \right)}}{{{a_3}\left( {X - {X_{\rm{s}}}} \right) + {b_3}\left( {Y - {Y_{\rm{s}}}} \right) + {c_3}\left( {Z - {Z_{\rm{s}}}} \right)}}}\end{array}} \right.$
|
(5) |
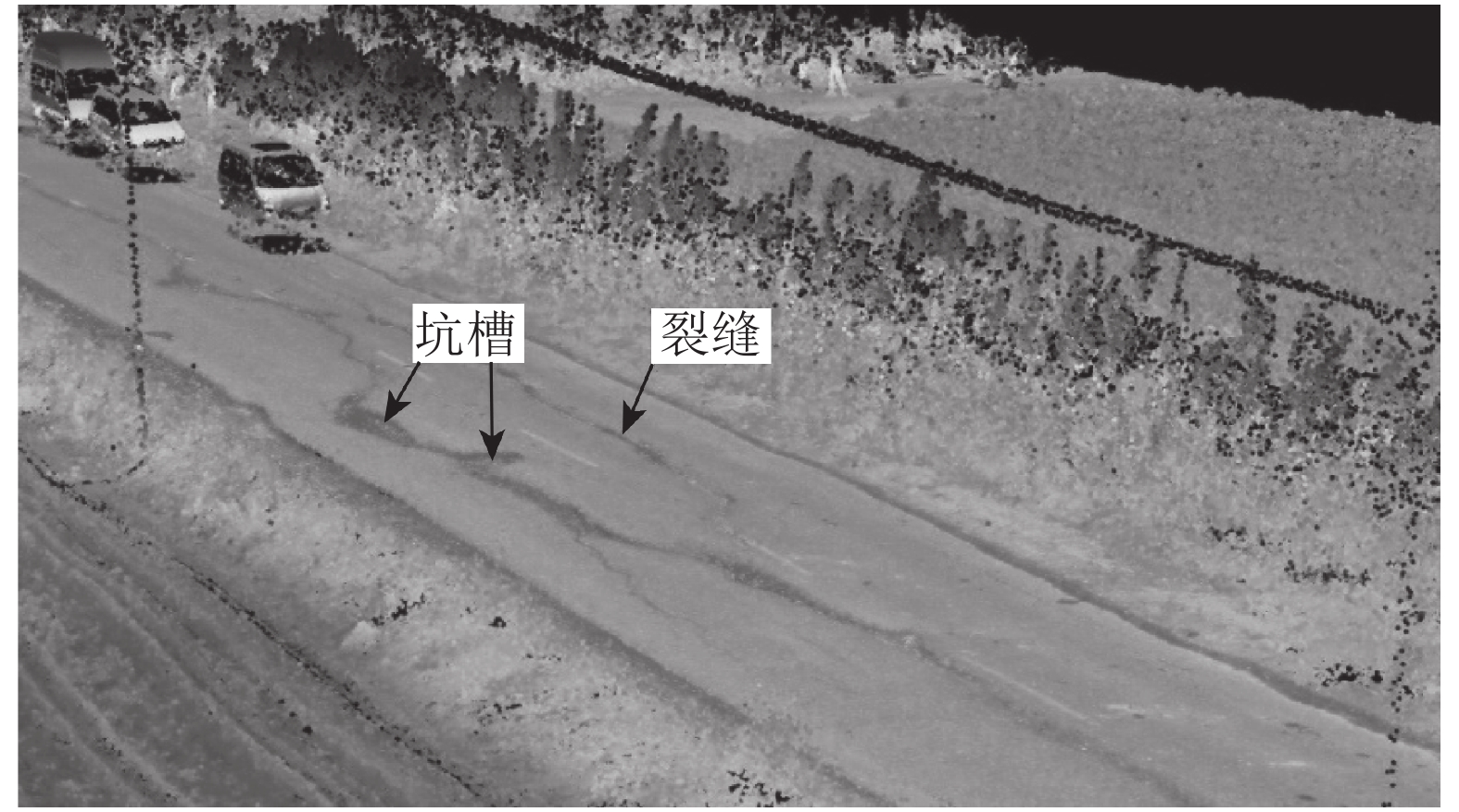
式中,x,y为像点的像平面坐标,x0、y0、f为影像的内方位元素,Xs、Ys、Zs为摄站点的物方空间坐标;X、Y、Z为地面点的物方空间坐标,ai、bi、ci(i=1, 2, 3)为影像的3个外方位角元素(偏航角,俯仰角,翻滚角)组成的9个方向余弦,即像点空间坐标系与像空间辅助坐标系之间的转换系数。基于路面的3维表面模型可对路面病害的几何特征进行测量统计(Ahmed 等,2011;Tiong 等,2012)。如,Zhang等人(2012)利用无人机获得了未铺设农田道路区域的正射影像图,并基于摄影测量法构建了道路的3维数字表面模型,对路面的车辙深度及空间分布进行了统计和测量。
3.4.2 LiDAR 3维分析法
LiDAR技术能直接获得包含X、Y、Z等3维信息和反射强度信息的路面点云数据,可更加快速便捷的构建道路路面的3维模型,提取路面病害特征如车辙、坑槽深度(图7)或检测路面平整度(Paska,2009;Uddin,2011;Jin,2011)。目前大部分的路面平整度评价指标均需基于取样路段路面的高程信息进行计算,如利用路面点云高程计算国际平整度指数(international roughness index)基本流程如下(刘圣洁, 2012)
(1) 基于LiDAR数据提取取样路段道路中间线(假设只有一个行车道)并得到中间线上所有点云坐标值(x,y,z);
(2) 每间隔0.5 m选择一个点作为标记点,取出每个标记点高程值Z1,Z2,Z3,…,Zn;
(3) 首先计算出所有高程样点的平均值Zm,然后利用式(6)求出路面的平整度标准差σ,最后根据路面实际状况中确定的σ与IRI的经验关系(σ=a·IRI+b)计算得出IRI。
|
$\sigma = \sqrt {\frac{1}{n}\sum\limits_{i = 1}^n {{{\left| {{Z_i} - {Z_{\rm{m}}}} \right|}^2}} } $
|
(6) |
3.5 不同路面遥感监测方法的比较与问题
图像处理与识别方法和探地雷达技术现已被广泛应用于路面监测管理系统,用于路面病害的检测和识别,但图像处理与识别法目前还只适用于车载平台所获得的高空间分辨率路面影像,对于机载或卫星所获得的高空间分辨率多光谱或高光谱路面遥感影像还暂无研究。探地雷达技术同样目前只适用于基于人工或车载平台的地面测量,对于基于机载或星载微波的路面监测方法尚无研究。亮度变化法和温度变化法适用于中高空间分辨率航空或卫星遥感影像,可对路面状况进行宏观监测,原理简单,方便快捷,但亮度变化法一般无法获得路面病害状况的细节特征信息。反射率光谱建模法和比辐射率光谱建模法能够对路面状况进行综合评估,但具有一定的局限性。如,对于低空间分辨率遥感影像,城市道路错综复杂,容易被汽车、建筑物、树木等设施遮挡,光谱异质性复杂,对路面状况反演精度较低,对于路面的车辙、裂缝等病害状况无法进行详细评估。此外,路面污染物(如:油、雨水、沙尘、土)对路面光谱的影响也会降低路面光谱的可靠性。所以基于光谱建模法对路面状况监测鲁棒性较低。由于城市热岛效应的影响,比辐射率光谱建模法在城市道路状况监测中精度较低。数字摄影测量法和LiDAR技术均可获得路面的3维信息,构建路面3维空间模型,对路面病害特征进行3维测量,如裂缝深度、车辙深度、坑槽深度等。数字摄影测量法需要处理海量的路面影像数据,而LiDAR技术可直接获得路面的3维空间信息和反射强度信息,更加方便高效但目前只集中于车载平台的路面调查应用。
可知,遥感技术已经开始逐步应用于道路路面状况的监测与管理中,部分技术已经成熟并广泛使用,如路面监测管理系统、探地雷达等;但是仍有部分遥感技术在路面状况监测应用中还存在着鲁棒性差、精度较低等问题,还需要进一步的研究探索,如路面光谱分析、基于机载和星载的路面状况遥感监测应用的适用性等。而且,不同监测方法均具有一定的局限性和适用性(见表6)。
表 6 不同路面遥感监测方法的比较
Table 6 Comparison between different remote sensing methods on pavement condition detection
| 方法名称 | 难易程度 | 路面宏观监测 | 路面病害监测 | 平台扩展性 | 3维测量 | 精度 | 鲁棒性 |
| 图像处理与识别法 | 中等 | 困难 | 可以 | 中 | 不能 | 高 | 高 |
| 亮度变化法 | 简单 | 可以 | 困难 | 中 | 不能 | 高 | 高 |
| 反射率光谱建模法 | 复杂 | 可以 | 困难 | 中 | 不能 | 中 | 低 |
| 温度变化法 | 简单 | 可以 | 可以 | 中 | 不能 | 高 | 高 |
| 比辐射率光谱建模法 | 复杂 | 可以 | 困难 | 中 | 不能 | 中 | 低 |
| 探地雷达 | 中等 | 不能 | 可以 | 差 | 不能 | 高 | 高 |
| 数字摄影测量法 | 复杂 | 可以 | 可以 | 中 | 能 | 中 | 中 |
| LiDAR | 中等 | 可以 | 可以 | 中 | 能 | 高 | 高 |
3.6 基于混合像元分解的路面质量遥感监测
由3.1.3节可知,随着沥青路面老化过程的推进,沥青路面光谱在不同老化阶段存在不同的光谱特征,同时考虑到低空间分辨率影像中,道路周围环境复杂,路面光谱异质性较高,导致路面质量状况反演精度较低的问题,因此,本文给出了一个研究实例来展示多端元混合像元分解法在沥青路面老化状况监测与评估中的实用性。
3.6.1 数据与方法
以北京市房山区东南部的5条沥青公路为实验区。获取了2013年9月21日覆盖实验区的WorldView-2多光谱遥感影像,该影像包含8个波段(可见光至近红外),空间分辨为2 m。首先对WorldView-2影像进行基本的预处理操作,包括辐射纠正、大气纠正、影像配准,最后得到地表的反射率影像。
为了解决遥感影像中路面混合像元的问题,引入了多端元线性混合像元分解模型,该模型认为一个混合像元的光谱通常是由两种或两种以上的不同地物成分的光谱以线性方式组合而成的。由于篇幅有限,关于多端元混合像元分解模型的详细信息请参考Pan等人(2017)和Roberts等人(1998)。本实验主要包括两个步骤:端元提取与优化、混合光谱分解与评价。本实验定义了3种类型的地物端元,分别为(1)路面端元:包括不同老化状况(初期、中期、后期)的沥青路面端元光谱信息(图2)。(2)非路面端元:包括除路面以外的其他地物端元光谱,如植被、裸土、水泥人行道、交通标线等。(3)阴影端元:由于地物遮挡形成的阴影像元。实验首先将已知地物类别的GPS点与影像进行空间匹配,获取GPS点对应像元的光谱信息,然后将该像元的光谱信息与地面光谱仪测量的光谱信息进行光谱角匹配,如果光谱角小于0.1,则选择该像元的光谱作为初选端元光谱,依次循环选择所有地物类别的像素点光谱建立初始端元光谱库,最后根据端元均平均方根误差指数对初始端元光谱进行优化最终确定每个地物类别的端元光谱(Pan 等,2017)。最终分别选取了15条路面端元光谱,其中每个子类型(初期、中期、后期)有5条端元光谱;12条非路面端元光谱,其中每个子类型(植被、人行道、交通线、裸土)有3条端元光谱;针对阴影端元选取了EAR指数较小的前3条光谱经平均得到了1条阴影端元光谱。
根据选定的端元集合,利用亚像元分解算法得到了不同老化状况(老化初期、老化中期与老化后期)的路面端元与非路面端元的丰度图。如果某像元包含某老化阶段路面的比例大于0.5,则认为该像元的路面处于该老化阶段,将3种老化阶段的影像以RGB合成生成假彩色合成图像,根据颜色即可直观判断某条道路路面处于老化的哪种阶段。
3.6.2 结果与分析
图8为实验区各路段不同老化阶段沥青路面的分类图。其中,区域A为良乡东区14号路的实景数码照片;区域B为白杨东路和东环路十字路口的实景数码照片;区域C为阳光南大街的实景数码照片;区域D为白杨东路西段的实景数码照片。通过与现场实景数码照片比较,可知分类得出的路面老化状况类型与实际路面老化状况吻合,例如良乡东区14号路路段A为近年翻修的新沥青路面被分类为老化初期沥青路面;阳光南大街路段C为年代已久的沥青路面被分类为老化后期沥青路面;白杨东路和东环路路段B和D通过实景可以发现各个车道由于使用频率不同表现为不同的老化状况,也被成功识别分类。
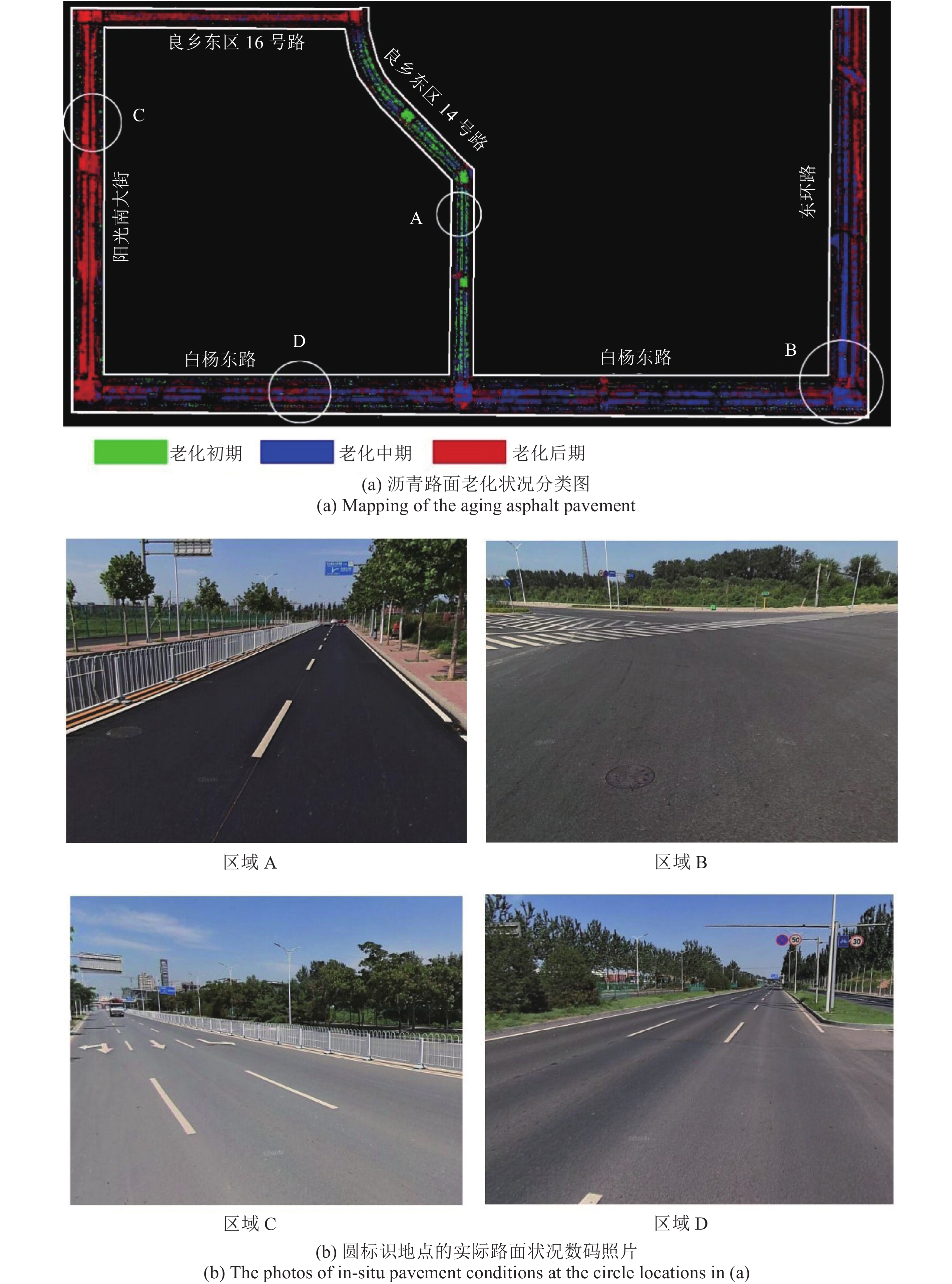
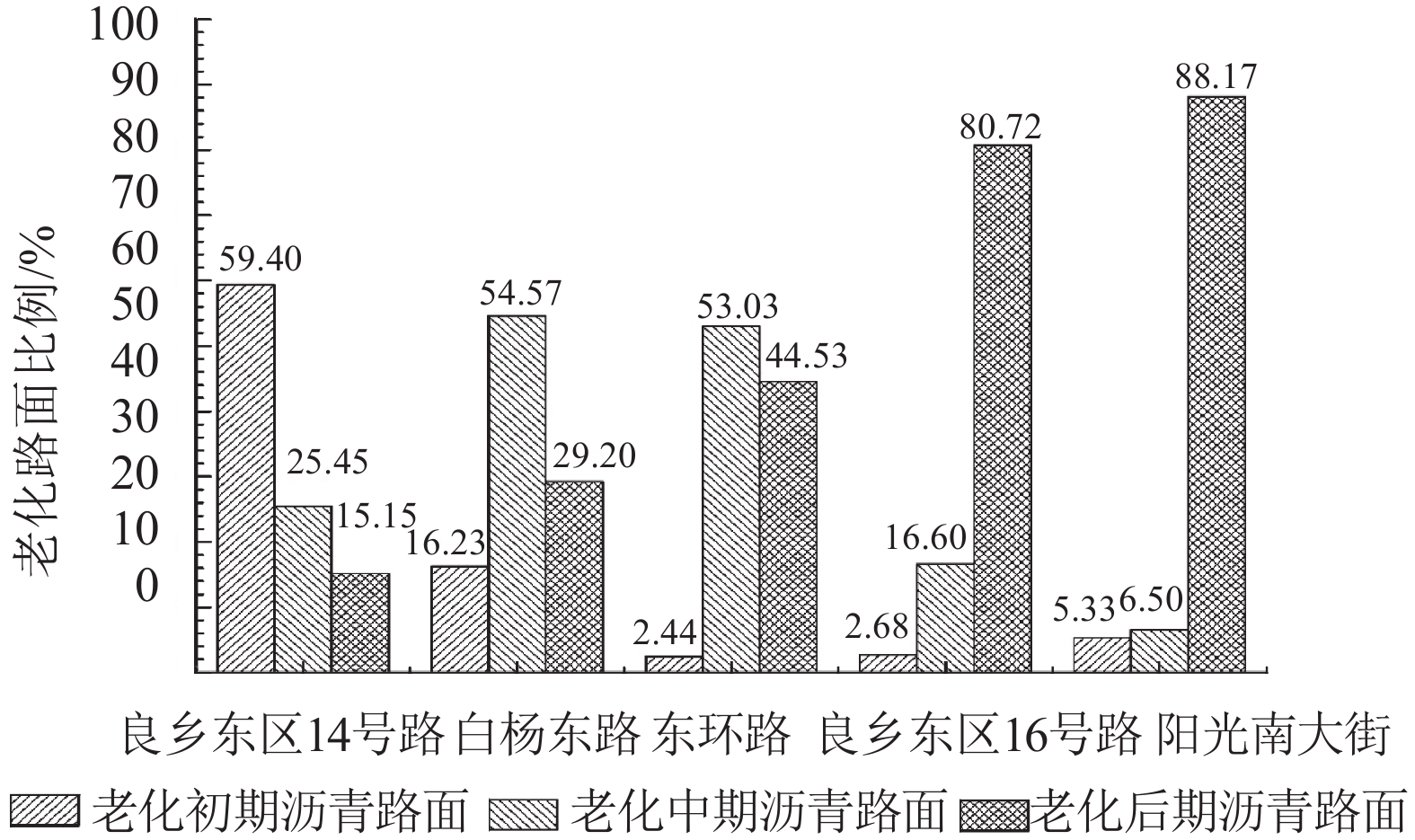
根据路面老化状况(初期,中期,后期)的丰度图,可进一步统计各个路段不同老化阶段的路面面积比例(图8)对路面老化状况进行定量评价。由图9可知,良乡东区14号路大部分路面都处于老化初期(59.4%)和老化中期(25.45%)。相比之下,阳光南大街和良乡东区16号路大部分路面处于老化后期,分别为88.17%和80.72%,表明该路面急需进行翻修和养护。东环路有53.03%和44.53%的路面标识为老化中期和后期,路面状况良好。
该实例很好展示了利用高空间分辨率的8波段WorldView-2多光谱遥感数据与多端元光谱分解策略,可以很好地构建沥青路面老化状况的监测与评价方法。
4 潜在研究方向
4.1 加强不同材质路面遥感监测的机理分析
虽然目前已初步了解随着道路投入运营使用,路面材质随着磨损、老化与形变,会导致路面的光谱特性(反射特性与热辐射特性)与空间几何特性发生变化,但是道路路面属于典型的人工混合材料,其光谱特性具有不稳定性与随机性,而且随着道路经由地的微地貌、施工水平、气象条件与环境条件差异,其热特性和空间几何特性都存在较大差异,远比自然地物(如植被、水体等)的光谱特性复杂。此外,道路老化是一个缓慢的过程,使得不同状况的路面可能存在相似的光谱曲线,因而无法区分。为此需要对大量的路面光谱特征进行特征提取并选择稳定性特征进行应用。寻找识别路面状况的最优特征谱段或谱段组合,从而建立敏感适用且鲁棒性高的路面状况指标光谱模型,既是路面状况遥感监测走向实用的基础,也可解决反射率建模中缺少先研知识的问题。
4.2 融合光谱特征与几何特征构建鲁棒性更强的监测模型
由于路面光谱信息变化的复杂性和局限性,仅仅依靠光谱特征还难以完全准确地评价道路路面状况,无法满足路面状况遥感监测的应用需求。目前的初步研究结果显示沥青路面的光谱信息变化还只能反映沥青路面的老化现象,但对沥青路面的病害特征(裂缝、车辙、坑槽等)还不能准确描述,而且路面病害往往与道路的寿命长短有着密切的联系。目前遥感不仅可以获取路面的光谱信息,同时也可以获取路面的空间信息。考虑到路面病害一般具有丰富的空间特征信息,所以融合路面光谱特征与空间几何特征,构建新的识别模型将是一个更具有学术价值和应用价值的方向之一,也可以解决仅仅依靠反射率光谱建模的不足。
4.3 将传统摄影测量与新的无人机LiDAR技术相结合
从前面的技术进展综述与问题分析可见,传统摄影测量方法与LiDAR技术都能获取路面的3维特征信息,但各自又具有优势。摄影测量在获取3维信息方面传感器简单、算法相对比较成熟;而LiDAR正好相反,传感器技术复杂且昂贵,数据处理算法复杂且尚不完备,但LiDAR更适合难以找到影像对匹配特征点的情况,且高程精度更高。所以探索二者的结合可能会增强路面3维精细建模,从而提取诸如裂缝等病害信息。
4.4 发挥无人机遥感在道路路面监测中的应用潜力
公路路面基本随道路呈线性延伸,延伸方向具有不定性。因此,依靠卫星遥感获取高分辨率的影像数据,通常难以获得全覆盖的数据,即使能够获取成本会很高,数据的使用率却低。近年发展起来的无人机遥感平台则可灵活机动地沿道路延伸方向设置飞行轨迹,仅仅获取道路区域的高分辨率遥感数据,可大大提高数据获取效率,满足业务化道路监测需要。同时,由于无人机平台可灵活搭载不同的传感器或者集成多种传感器,构建多传感器协同监测系统,可以增强道路路面遥感监测的能力。因此,研发专门用于道路路面健康监测的无人机多传感器协同监测系统将是一个重要的发展方向。
4.5 基于遥感技术建立天–空–地协同路面监测方案
由于路网分布范围广,单条道路呈线性延伸,所以首先需要确定感兴趣区域,然后再对感兴趣区域进行详查。根据卫星遥感对路面进行普查,确定老化严重路段,老化严重路面意味着可能存在病害,然后利用无人机对感兴趣区域进行重点调查,根据调查结果决定是否进行基于车载平台和路面监测管理系统进行抽样调查,由此构成天–空–地3级平台的协同监测方案,可更好地服务于路面养护管理。
不同等级的公路所需要的监测频率不同。监测频率较高且范围广的可选择卫星、无人机等灵活平台,监测频率较低的可以选择路面状况快速检测车进行排查。不同等级公路所需要的检测精度不同,根据精度要求选择相应的数据源和方法。如,对于需要及时养护的高速公路或重要路段,则应选择精度较高的基于图像识别和探地雷达的快速检测车,降低路面病害的漏检率;而对于偏远地区或寒旱地区(如新疆)的道路、农村道路则可更多地依靠卫星遥感进行普查,无人机航空遥感进行重点监测的方式,为交通管理和道路路面养护提供决策支持。
总之,随着越来越多的卫星遥感传感系统上天运行,低空无人机遥感技术的发展日益发展以及地面监测系统的基本成熟,构建空天地一体化的协同公路路面监测系统将是今后交通遥感领域的发展方向之一。
5 结 语
随着高速公路和其他等级公路的飞速发展,道路状况的监测和管理水平亟待提高。通过文献分析表明,基于车载的路面监测管理系统和探地雷达技术已基本成熟并在路面状况监测应用中广泛使用,但无法快速获取大范围路面质量状况信息。另一方面,基于机载和星载遥感器的路面状况监测技术还存在着鲁棒性差、精度低等不足,还需要进一步的研究和探索:加强不同材质路面遥感监测的机理分析,融合光谱特征与几何特征构建鲁棒性更强的监测模型,摄影测量数据与LiDAR数据的融合处理等。为解决中高空间分辨率遥感影像中路面混合像元对路面老化状况监测的影响,本文提出了一种基于多端元混合光谱分析模型的沥青路面老化状况监测方法,并以北京市南六环良乡附近的几条道路的路面质量监测为实例,验证了所提出方法的实用性。结果表明:该方法可快速有效区分路沥青面混合像元中不同老化状况的沥青路面,为大范围路面老化状况监测提供了一种技术途径。
随着对地观测技术的发展,依靠多平台遥感技术协同来建立全新的道路路面健康状况监测手段将是今后研究的方向,尤其是随着无人机遥感系统的不断完善,遥感影像的空间分辨率和光谱分辨率将不断得到提高,为今后建立更加有效的路面健康状况遥感监测模型提供了可能。此外,将如深度学习、人工智能、大数据分析等先进算法引入公路路面状况的遥感监测中也具有广泛的应用前景和潜力。
参考文献(References)
-
Ahmed M, Haas C T and Haas R. 2011. Toward low-cost 3D automatic pavement distress surveying: the close range photogrammetry approach. Canadian Journal of Civil Engineering, 38 (12): 1301–1313. [DOI: 10.1139/L11-088]
-
Branco L H C and Segantine P C L. 2015. MaNIAC-UAV-a methodology for automatic pavement defects detection using images obtained by Unmanned Aerial Vehicles. Journal of Physics: Conference Series, 633 (1): 012122 [DOI: 10.1088/1742-6596/633/1/012122]
-
Chambon S and Moliard J M. 2011. Automatic road pavement assessment with image processing: review and comparison. International Journal of Geophysics, 2011 : 989354 [DOI: 10.1155/2011/989354]
-
Cline G D, Shahin M Y and Burkhalter J A. 2003. Automated data collection for pavement condition index survey//Proceedings of 20 03 Annual Meeting of Transportation Research Board. Washington: TRB: 1–16
-
Emery W, Yerasi A, Longbotham N and Pacifici F. 2014. Assessing paved road surface condition with high-resolution satellite imagery//Proceedings of 2014 IEEE International Geoscience and Remote Sensing Symposium. Québec: IEEE: 1–16
-
Feng W, Wu Y D and Qiang Z. 2009. UAV borne real-time road mapping system//Proceedings of 2009Joint Urban Remote Sensing Event. Shanghai: IEEE: 1–7
-
Gan L, Gan L C, Tian M and Zhao M T. 2008. Step-sampling system of high resolution ground penetrating radar. Chinese Journal of Radio Science, 23 (3): 555–559. [DOI: 10.13443/j.cjors.2008.03.028] ( 甘露, 甘良才, 田茂, 赵茂泰. 2008. 高分辨率探地雷达步进系统的研究与实现. 电波科学学报, 23 (3): 555–559. [DOI: 10.13443/j.cjors.2008.03.028] )
-
Gomez R B. 2002. Hyperspectral imaging: a useful technology for transportation analysis. Optical Engineering, 41 (9): 2137–2143. [DOI: 10.1117/1.1497985]
-
Herold M and Roberts D. 2005. Spectral characteristics of asphalt road aging and deterioration: implications for remote-sensing applications. Applied Optics, 44 (20): 4327–4334. [DOI: 10.1364/AO.44.004327]
-
Herold M, Roberts D A, Gardner M E and Dennison P E. 2004. Spectrometry for urban area remote sensing—development and analysis of a spectral library from 350 to 2400 nm. Remote Sensing of Environment, 91 (3/4): 304–319. [DOI: 10.1016/j.rse.2004.02.013]
-
Herold M, Roberts D, Noronha V and Smadi O. 2008. Imaging spectrometry and asphalt road surveys. Transportation Research Part C: Emerging Technologies, 16 (2): 153–166. [DOI: 10.1016/j.trc.2007.07.001]
-
Huang Y X and Xu B G. 2006. Automatic inspection of pavement cracking distress. Journal of Electronic Imaging, 15 (1): 013017 [DOI: 10.1117/1.2177650]
-
Jemison H B, Burr B L, Davison R R, Bullin J A and Glover C J. 1992. Application and use of the ATR, FT-IR method to asphalt aging studies. Fuel Science and Technology International, 10 (4/6): 795–808. [DOI: 10.1080/08843759208916021]
-
Jin H. 2011. An Integrated Approach for Precise Road Reconstruction from Aerial Imagery and LiDAR Data. Brisbane, Australia: Queensland University of Technology
-
Jitprasithsiri S. 1997. Development of A New Digital Pavement Image Processing Algorithm for Unified Crack Index Computation. Utah, America: The University of Utah
-
Jol H M. 2008. Ground Penetrating Radar Theory and Applications. Oxford, UK: Elsevier [DOI: 10.1016/B978-0-444-53348-7.00016-8]
-
Kertész I, Lovas T and Barsi A. 2008. Photogrammetric pavement detection system//2008 XXXVII ISPRS Congress: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. Beijing: ISPRS: 897–902
-
Kotthaus S, Smith T E L, Wooster M J and Grimmond C S B. 2014. Derivation of an urban materials spectral library through emittance and reflectance spectroscopy. ISPRS Journal of Photogrammetry and Remote Sensing, 94 : 194–212. [DOI: 10.1016/j.isprsjprs.2014.05.005]
-
Liu S J. 2012. Research on the Testing Index on the Pavement Health Pavement Structure of Asphalt Pavement Structure. Xi’an: Chang’an University (刘圣洁. 2012. 沥青路面健康性能检测体系研究. 西安: 长安大学 [DOI: 10.7666/d.D234798])
-
Loizos A and Plati C. 2007. Accuracy of pavement thicknesses estimation using different ground penetrating radar analysis approaches. NDT andE International, 40 (2): 147–157. [DOI: 10.1016/j.ndteint.2006.09.001]
-
Manzo C, Mei A, Salvatori R, Bassani C and Allegrini A. 2014. Spectral modelling used to identify the aggregates index of asphalted surfaces and sensitivity analysis. Construction and Building Materials, 61 : 147–155. [DOI: 10.1016/j.conbuildmat.2014.02.056]
-
Mei A, Fiore N, Salvatori R, D’Andrea A and Fontana M. 2012. Spectroradiometric laboratory measures on asphalt concrete: preliminary results. Procedia-Social and Behavioral Sciences, 53 : 514–523. [DOI: 10.1016/j.sbspro.2012.09.902]
-
Mei A, Salvatori R, Fiore N, Allegrini A and D’Andrea A. 2014. Integration of field and laboratory spectral data with multi-resolution remote sensed imagery for asphalt surface differentiation. Remote Sensing, 6 (4): 2765–2781. [DOI: 10.3390/rs6042765]
-
Mettas C, Themistocleous K, Neocleous K, Christofe A, Pilakoutas K and Hadjimitsis D. 2015. Monitoring asphalt pavement damages using remote sensing techniques//Proceedings of SPIE 9535Third International Conference on Remote Sensing and Geoinformation of the Environment. Paphos, Cyprus: SPIE: 95350S [DOI: 10.1117/12.2195702]
-
Ministry of Transport of the People’s Republic of China. 2001. National Standard for Asphalt Pavement Maintenance. Beijing: Research Institute of Highway Ministry of Transport: 1–122. (中华人民共和国交通部. 2001. 公路沥青混凝土路面养护技术规范. 北京: 交通部公路科学研究院: 1–122)
-
Ministry of Transport of the People’s Republic of China. 2007. JTG H20-2007Highway Performance Assessment Standard. Beijing: Research Institute of Highway Ministry of Transport: 1–33 (中华人民共和国交通部. 2007. JTG H20-2007公路技术状况评定标准. 北京: 交通部公路科学研究院: 1–33)
-
Mohammadi M. 2012. Road classification and condition determination using hyperspectral imagery//2012 XXII ISPRS Congress: International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.Melbourne: ISPRS: 141–146
-
Mokhtari S. 2015. Analytical Study of Computer Vision-based Pavement Crack Quantification Using Machine Learning Techniques. Florida, America: University of Central Florida Orlando
-
Mokhtari S, Wu L L and Yun H B. 2016. Comparison of supervised classification techniques for vision-based pavement crack detection//Transportation Research Board 95th Annual Meeting. Washington: 1–17
-
Moropoulou A, Avdelidis N, Koui M and Kakaras K. 2001. An application of thermography for detection of delaminations in airport pavements. NDT and E International, 34 (5): 329–335. [DOI: 10.1016/S0963-8695(00)00047-5]
-
Noronha V, Herold M, Roberts D and Gardner M. 2002. Spectrometry and hyperspectral remote sensing for road centerline extraction and evaluation of pavement condition//National Consortium on Remote Sensing in Transportation—Infrastructure Management. California, America: National Consortium on Remote Sensing in Transportation: 1–12
-
Pan Y F, Zhang X F, Jin X, Yu H F, Rao J F, Tian S H, Luo L and Li C. 2016. Road pavement condition mapping and assessment using remote sensing data based on MESMA. IOP Conference Series: Earth and Environmental Science, 34 (1): 012023 [DOI: 10.1088/1755-1315/34/1/012023]
-
Pan Y F, Zhang X F, Tian J, Jin X, Luo L and Yang K. 2017. Mapping asphalt pavement aging and condition using multiple endmember spectral mixture analysis in Beijing, China. Journal of Applied Remote Sensing, 11 (1): 016003 [DOI: 10.1117/1.JRS.11.016003]
-
Pascucci S, Bassani C, Palombo A, Poscolieri M and Cavalli R. 2008. Road asphalt pavements analyzed by airborne thermal remote sensing: preliminary results of the Venice Highway. Sensors, 8 (2): 1278–1296. [DOI: 10.3390/s8021278]
-
Paska E P. 2009. State-of-the-Art Remote Sensing Geospatial Technologies in Support of Transportation Monitoring and Management. Columbus, OH, America: The Ohio State University
-
Peng B, Jiang Y S, Han S F and Luo N X. 2014. A review of automatic pavement crack image recognition algorithms. Journal of Highway and Transportation Research and Development, 31 (7): 19–25. [DOI: 10.3969/j.issn.1002-0268.2014.07.004] ( 彭博, 蒋阳升, 韩世凡, 罗楠欣. 2014. 路面裂缝图像自动识别算法综述. 公路交通科技, 31 (7): 19–25. [DOI: 10.3969/j.issn.1002-0268.2014.07.004] )
-
Puente I, Solla M, González-Jorge H and Arias P. 2013. Validation of mobile LiDAR surveying for measuring pavement layer thicknesses and volumes. NDT and E International, 60 : 70–76. [DOI: 10.1016/j.ndteint.2013.07.008]
-
Roberts D A, Gardner M, Church R, Ustin S, Scheer G and Green R O. 1998. Mapping chaparral in the Santa Monica Mountains using multiple endmember spectral mixture models. Remote Sensing of Environment, 65 (3): 267–279. [DOI: 10.1016/S0034-4257(98)00037-6]
-
Saar T and Talvik O. 2010. Automatic asphalt pavement crack detection and classification using neural networks//Proceedings of the 12th Biennial Baltic Electronics Conference. Tallinn, Estonia: IEEE: 345–348
-
Schnebele E, Tanyu B, Cervone G and Waters N. 2015. Review of remote sensing methodologies for pavement management and assessment. European Transport Research Review, 7 : 1–19. [DOI: 10.1007/s12544-015-0156-6]
-
Themistocleous K, Neocleous K, Pilakoutas K and Hadjimitsis D G. 2014. Damage assessment using advanced non-intrusive inspection methods: integration of space, UAV, GPR, and field spectroscopy//Proceedings of the SPIE 9229Second International Conference on Remote Sensing and Geoinformation of the Environment. Paphos, Cyprus: SPIE: 92291O [DOI: 10.1117/12.2069507]
-
Tiong P L Y, Mustaffar M and Hainin M R. 2012. Road surface assessment of pothole severity by close range digital photogrammetry method. World Applied Sciences Journal, 19 (6): 867–873. [DOI: 10.5829/idosi.wasj.2012.19.06.3353]
-
Tong Q X, Zhang B, Zheng L F. 2006. Hyperspectral Remote Sensing: Principle, Method and Application. Beijing: Higher Education Press: 19–27 (童庆禧, 张兵, 郑兰芬. 2006. 高光谱遥感: 原理、技术与应用. 北京: 高等教育出版社: 19–27)
-
Uddin W. 2011. Remote sensing laser and imagery data for inventory and condition assessment of road and airport infrastructure and GIS visualization. International Journal of Roads and Airports, 1 (1): 53–67.
-
Uddin W and Al-Turk E. 2001. Airborne LIDAR digital terrain mapping for transportation infrastructure asset management//Proceedings of the Fifth International Conference on Managing Pavements. WashingtonSeattle, America: University of Washington: 11–14
-
Zhang C S and Elaksher A. 2012. An unmanned aerial vehicle-based imaging system for 3D measurement of unpaved road surface distresses. Computer-Aided Civil and Infrastructure Engineering, 27 (2): 118–129. [DOI: 10.1111/j.1467-8667.2011.00727.x]
-
Zhang J Q, Pan L and Wang S G. 2003. Photogrammetry. Wuhan: Wuhan University Press: 30–56 (张剑清, 潘励, 王树根. 2003. 摄影测量学. 武汉: 武汉大学出版社: 30–56)
-
Zhang S and Bogus S M. 2014. Use of low-cost remote sensing for infrastructure management//Construction Research Congress 2014. Reston, VA, USA: ASCE: 1299–1308
-
Zhao Y S. 2003. Principle and Methods of Remote Sensing. Beijing: Science Press: 104–129 (赵英时. 2003. 遥感应用分析原理与方法. 北京: 科学出版社: 104–129)


