

|
收稿日期: 2016-08-12
第一作者简介: 于生全(1978— ),男,高级工程师,研究方向为可见光遥感总体技术研究。E-mail:huang.wo6@gmail.com
通讯作者简介: 黄伟(1982— ),男,高级工程师,研究方向为遥感图像实时处理研究。E-mail:wohuangwei@126.com
中图分类号: TP701
文献标识码: A
|
摘要
相机分系统是“浦江一号”卫星的关键载荷之一。它在光学系统、指向摆镜以及电子学设计方面均坚持集成化、小型化的思想。整机结构紧凑,体积小,重量轻。相机光学系统选择三反离轴结构,与同轴系统相比,具有视场大、无遮拦、传函高等优点。通过光学设计合理布局,有效控制了光学系统尺寸;合理优化光学系统公差,降低了机械设计难度和装调难度;光学系统后截距对镜间距变化不敏感,在没有调焦机构时仍能满足清晰成像的要求。相机利用摆镜机构实现多目标快速指向,能在一个成像周期内对多个目标成像,反应时间短,成像效率高。摆镜指向机构采用电机+齿轮组的驱动方式;光电编码器与指向镜同轴安装,能够精确测量指向角度,对目标准确定位。在一个电子设备内集成视频成像、图像压缩及编码、遥控遥测、控温以及供配电等功能。对外采用标准的即插即用1553B接口以及小型高速Spacewire数传接口,实现了设备快速组装和测试。电路的集成化设计,减少了设备数量,进而减少了整个系统的体积、重量和功耗。卫星在轨运行以后,结合用户需求,优化在轨测试流程,卫星入轨1个月内完成了相机的全部测试和评估工作。迄今为止,相机运行正常,性能优越。该相机的研制成功及在轨稳定运行,为后续高性能轻小型相机的设计提供了有力的技术支撑。
关键词
离轴三反, 摆镜机构, 高集成度电子学, 在轨测试
Abstract
" Pujiang-1” satellite was successfully launched by the ChangZheng-11 vehicle from the JiuQuan Satellite Launch Center, China on September 25, 2015. The camera subsystem is one of the key payloads of the " Pujiang-1” satellite. The optical system, the pointer mirror mechanism, and the electronics of the camera were designed and produced under the concept of integration and miniaturization, which led to the compact, small, and light weight structure of the camera. With the novel design of the off-axis three-mirror reflective optical system, the camera includeda larger field of view and higher MTF value without a cover compared with the traditional coaxial system. By optimizing the layout of the optical elements, small volume was achieved. The difficulty of mechanical design and alignment was also reduced by optimizing the tolerance of the optical system. Additionally, this optical system was designed without a focusing mechanism but it could still address imaging needs because the back focal length was insensitive to the spacing change of the mirror. The camera used the pointer mirror mechanism to realize multi-target rapid pointing, enabling the capturemulti-target in each single imaging cycle, thereby shortening reaction time and improving imaging efficiency. The pointer mirror mechanism adopted the motor and gear set drive mode. The photoelectric encoder was installed coaxially with the mirror, with which the point angle can be precisely and accurately measured. In the electronic part, several functions, such as video imaging, image compression and coding, remote telemetry, temperature control, and power supply and distribution were integrated into one device. Standard plug-and-play 1553B communication and small-shape high-speed SpaceWire transmission interfaces were adopted to achieve rapid assembly and testing equipment in line with the modular design trend. The integrated circuit design reduced the number of devices, the overall system volume, system weight, and power consumption. After the satellite operating in-orbit, the in-orbit commissioning process was optimized combined with user needs. All the test and evaluation work were completed within one month.The camera normallyoperated with superior performance until today. The successful development of this camera and in-orbit stable operation provides a strong technical support for the follow-up high-performance light and smart cameras.
Key words
off-axis three-mirror reflective, pointer mirror mechanism, highly-integrated electronic device design, in-orbit commissioning
1 引 言
“浦江一号”卫星于2015年9月25日在酒泉卫星发射中心发射成功(姚天宇,2015)。“浦江一号”相机分系统是卫星的关键有效载荷。相机具有覆盖范围宽、重复观测周期短的特点。它采用三反离轴光学系统加一维摆镜机构,设计在500 km轨道上可实现方圆600 km范围指向性成像,星下点分辨率2.85 m,幅宽23 km。
2 相机关键技术及验证
2.1 总体设计
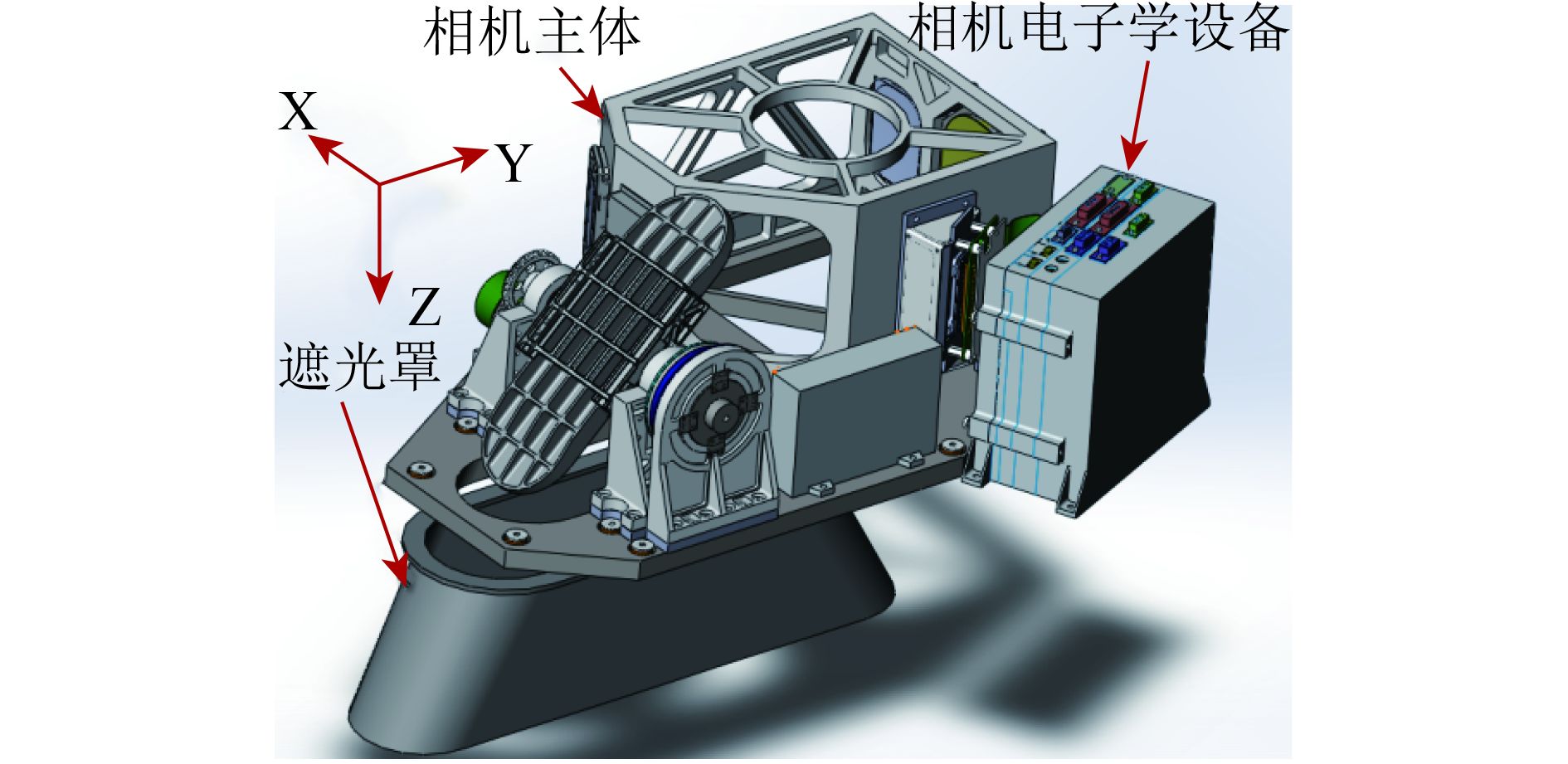
相机分系统采用光机电热一体化设计,选择了轻小型化设计方案:采用小相对孔径的全反式光学系统、先进的TDICCD成像技术、轻型结构材料,其中TDICCD成像技术的采用是实现轻小型化的基础。相机包括3台单机,分别为相机主体、相机电子学设备和遮光罩。图1为相机的总体构型示意图。
从总体构型相对于传统相机设计具有以下特点:
(1) 光机紧凑型设计,在小外形空间内实现光路折转,缩小了体积,减少重量;
(2) 在镜头前增加了摆镜,一轨内可进行多次目标成像,机动性强,成像效率提高;
(3) 电子学集成多种功能并采用标准的即插即用通讯接口以及数传接口;模块化设计快速集成,减少了设备数量,减小了体积、重量、功耗。

2.2 光学系统设计
光学系统选择离轴系统,与同轴系统相比,具有视场大、无遮拦、传函高等优点。光学系统设计目标主要包括:
(1) 在视场内实现接近衍射极限的传函;
(2) 合理布局,有效控制光学系统尺寸;
(3) 合理优化光学系统公差,降低机械设计难度和装调难度;
(4) 光学系统没有调焦机构,对温度变化不敏感。
针对以上设计目标,主镜与三镜设计为离轴非球面,在全视场内实现了接近衍射极限的成像品质;孔径光阑位于次镜,通过视场倾斜来避免中心遮拦;非球面反射镜均设计为二次曲面而非高次曲面,降低了光学加工与检测的难度;平面折转镜折叠光路,减小了光学系统长度。图2所示为光学系统布局图,图3为相应的MTF变化曲线图。
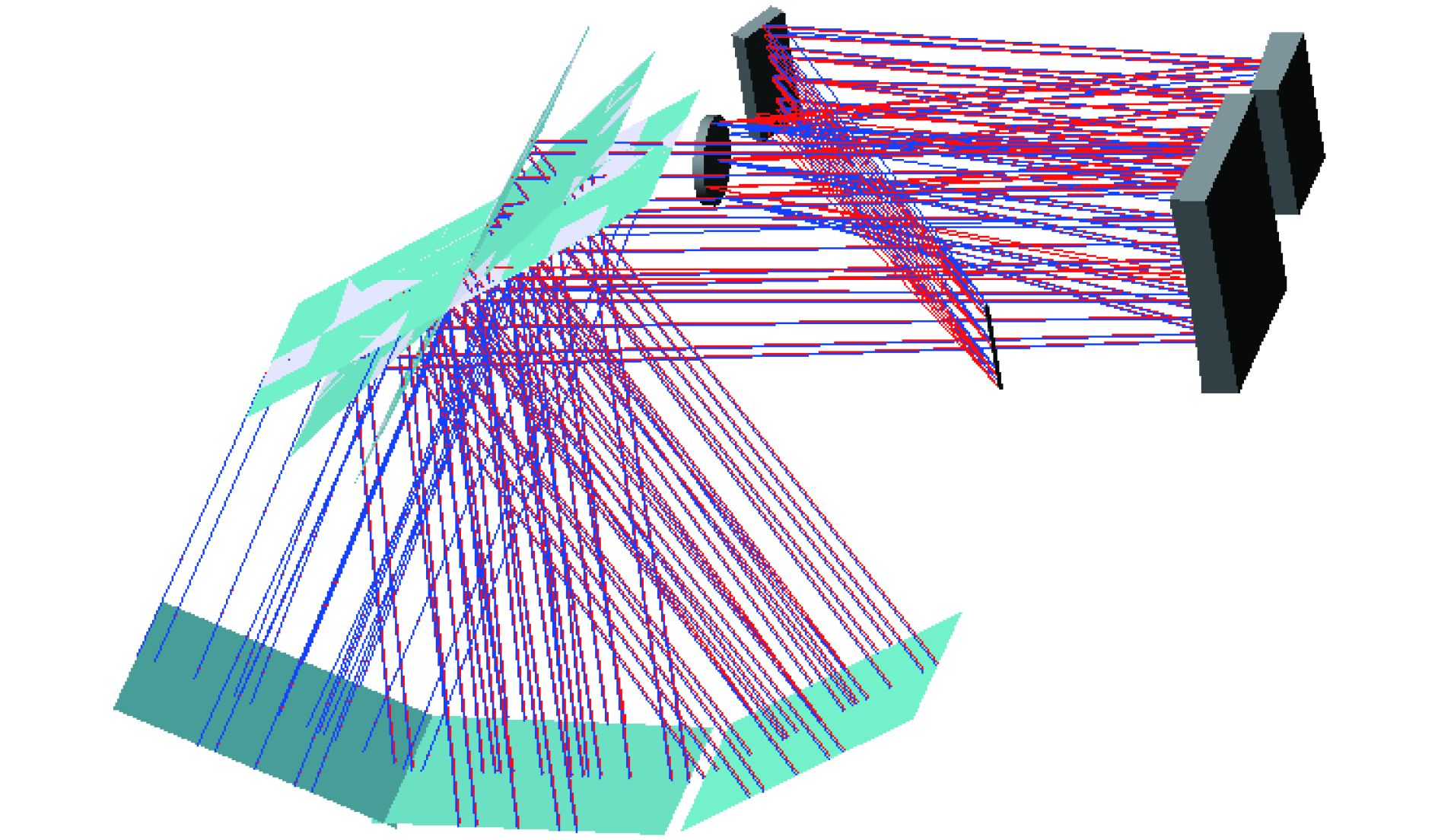
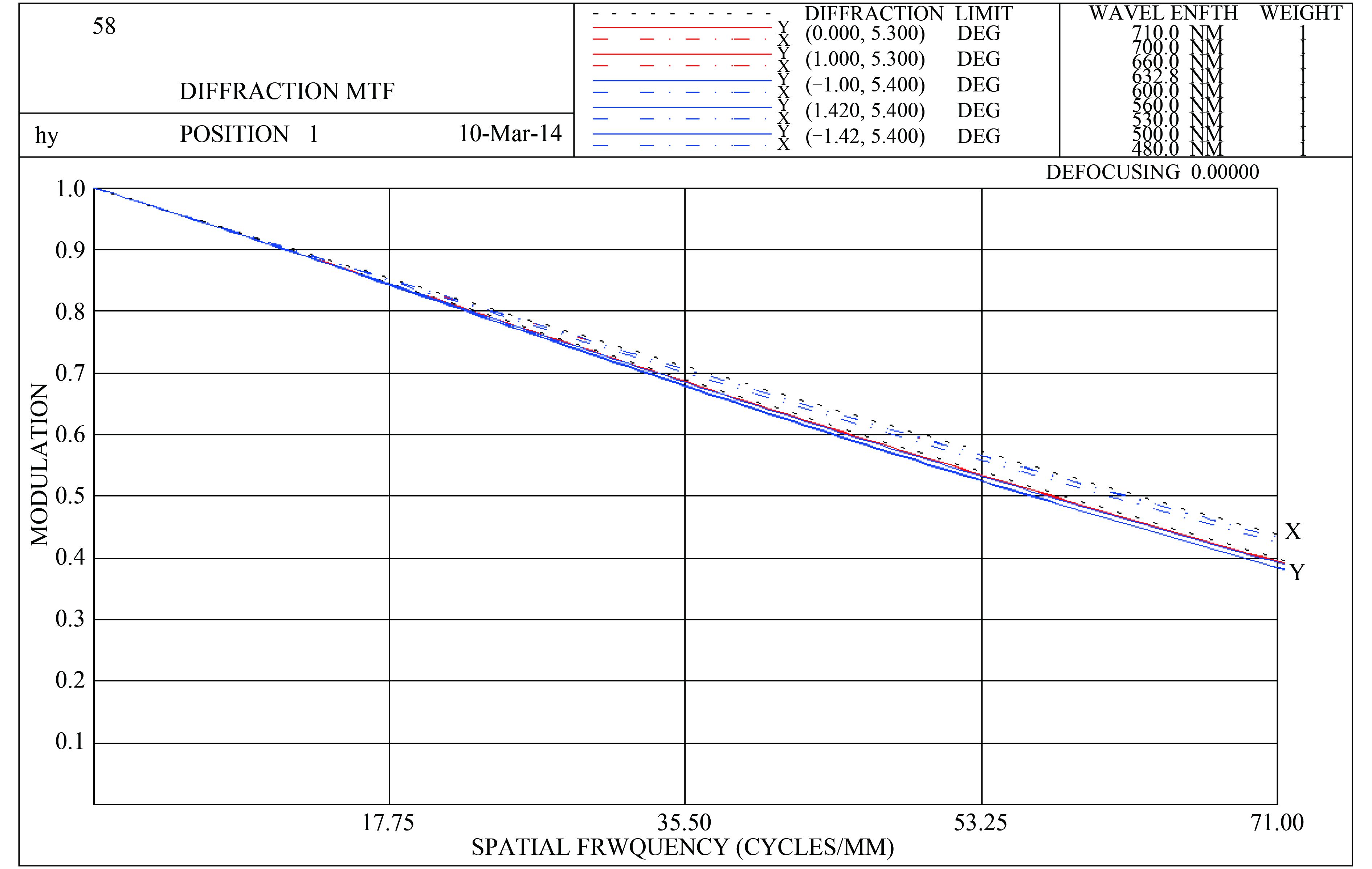
根据设计结果,光学系统在2.84°×0.1°视场内平均传函优于0.4,接近衍射极限;合理优化光学系统公差,反射镜倾斜10″或平移60 μm引起MTF下降量小于0.01,如图3所示,较宽松的公差要求降低了结构设计、加工与装调的难度。系统后截距对镜间距变化不敏感,温度变化±3 ℃,对光学系统焦距、像面位置、系统传函影响不大,在没有调焦机构时仍能满足清晰成像需求。
2.3 光机结构关键技术及验证
为实现卫星灵活大范围成像,相机采用光学系统前端加装摆镜机构实现。指向机构采用如图4所示的方案,电机+齿轮组的驱动方式简单可靠,并通过电机自锁和制动器实现了锁定机构的功能,大大降低了系统的体积重量;采用渐开线斜齿轮传动以及制动器消颤震的设计有效提高了机构的传动精度和响应速度;光电编码器与指向镜同轴安装,能够精确测量指向角度,能够对目标准确定位;通过传动机构的优化,缩短了装调和测试的周期,降低了研制成本。

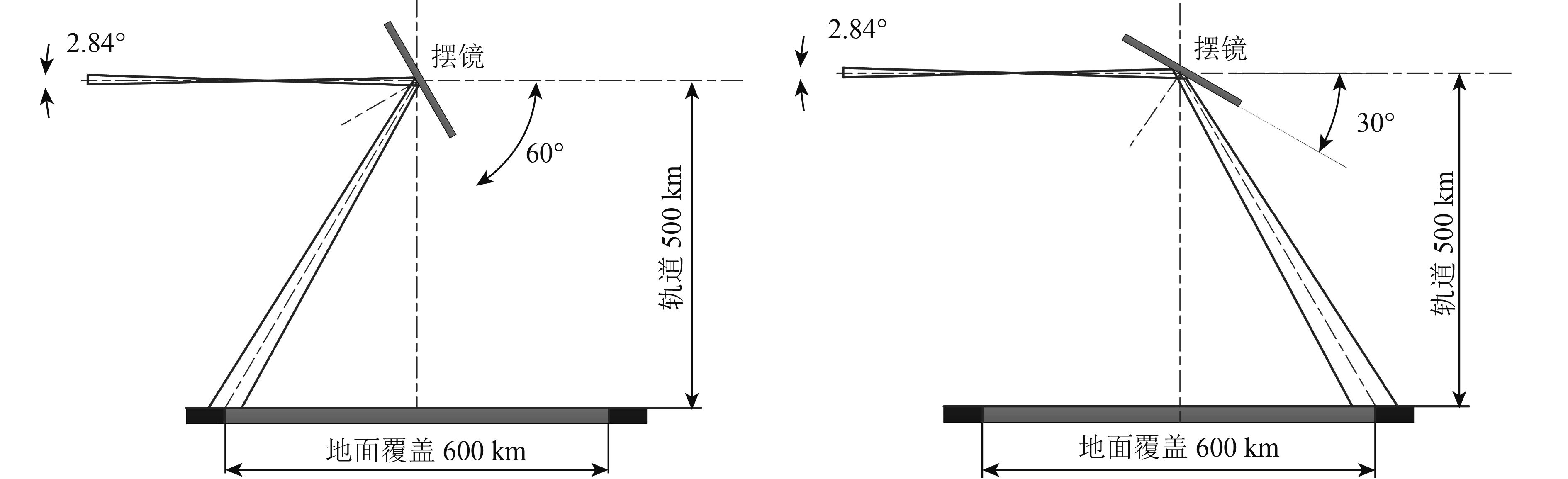
摆镜可以帮助相机在没有卫星侧摆的情况下,通过摆镜实现扩大成像范围,如图5所示。摆镜设计能在500 km的轨道上,光轴转动±15°,可实现地面方圆600 km的覆盖。
2.4 一体化电子学关键技术
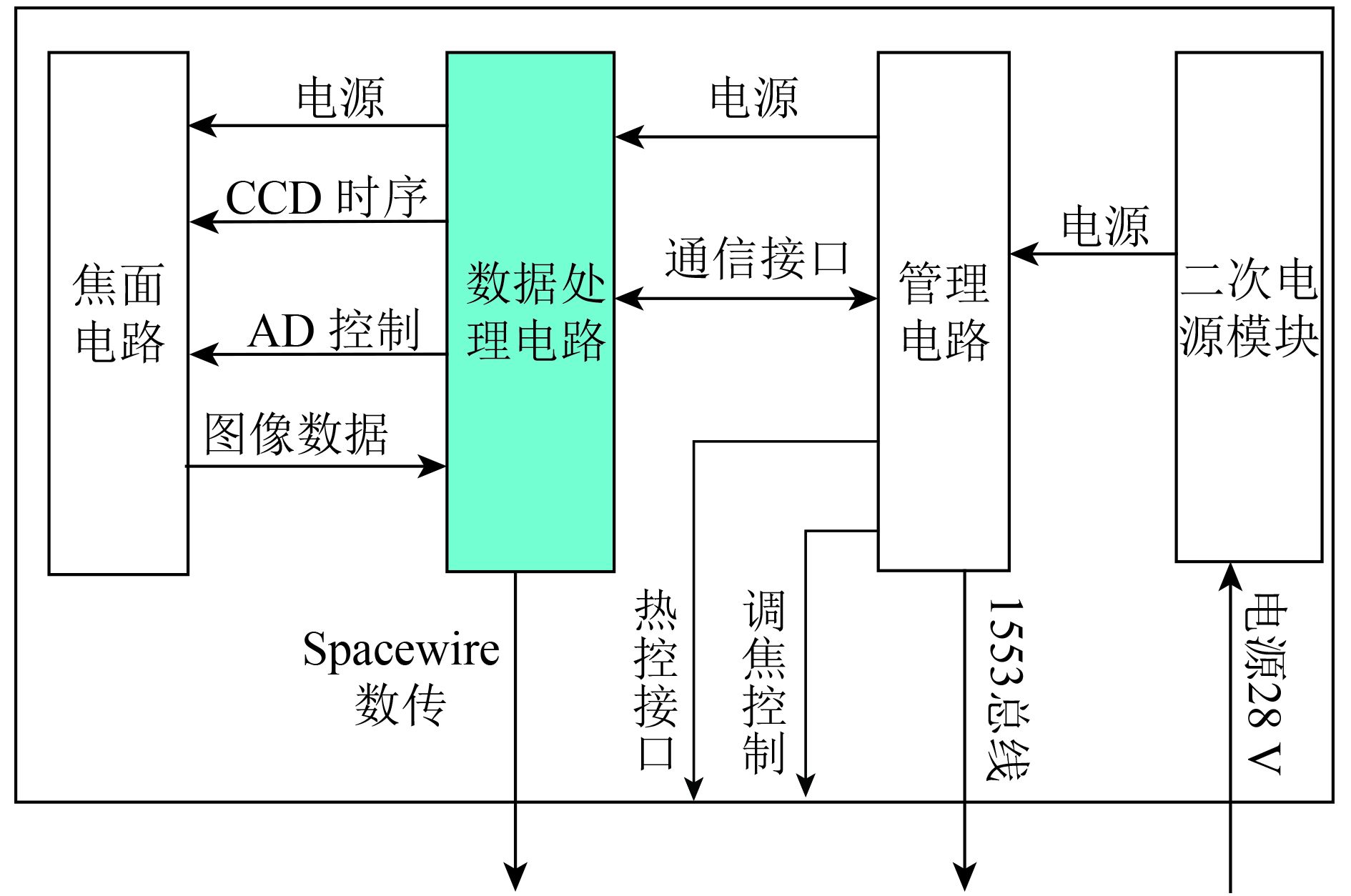
传统的光学遥感相机电子学单机设备多、接口复杂、集成度不高,在体积、重量、功耗各方面均不能满足空间光学高分辨率遥感器低功耗、轻小型、接口协议简单,根据不同的卫星任务需求组合配置有效载荷的需求(姚娜,2010)。另一方面,高性能、高集成度集成电路日新月异,航天用高速协议标准如Spacewire不断成熟,为遥感相机电子学设备的轻小型、高集成度提供了技术储备(郭今昌,2009)。本相机电子学将视频成像电路、管理电路、控温电路及二次电源电路集成到一个设备内部,与外部仅有3个接口,+28电源输入提供能源、1553 B实现遥控遥测,Spacewire实现200 Mbps高速数传(陈大羽 等,2010)。
电子学设备组成如图6所示,按照不同电路的功能分解为焦面电路、数据处理电路、管理控制电路及电源处理电路。焦面电路板主要完成CCD时序驱动、CCD模拟信号处理、CCD模拟信号的AD量化,对外的数据交换通过母线传输,从外部获取电源及时序信号,输出图像数据信号。数据处理电路板核心芯片为FPGA,完成CCD的时序控制、AD芯片控制、图像数据JPEG2000压缩以及Spacewire数传接口的控制。数传口采用Spacewire标准接口,便于模块化设计。数据处理软件详细设计详见黄伟等人(2014)的论文。管理电路板为长期加电电路板,完成相机积分时间实时计算、偏流角实时计算、在轨的热控管理及相机的参数设置管理,同时完成相机控制、遥控遥测的管理。相机热控包括12路加热控制、16路热敏电阻测温采样,电路根据热敏电阻的采样温度进行加热开关控制,热控软件详细设计见常霞等人(2014)的论文。管理电路以DSP为核心,与星上综合电子设备采用1553B总线通讯,完成本系统与上级设备的遥控遥测功能。DC\DC电源模块接收外部输入+28 v电,完成相机所需的二次电源变换,加断电指令以及电源直接遥测通过母线传递。
在轨一年多的运行结果表明,相机CCD成像、JPEG2000压缩、遥控遥测、电源管理功能正常,性能稳定。
2.5 高精度热控技术
在轨光机结构的热稳定性对最终成像质量有重要影响。“浦江一号”温控方式以被动温控为主,主动温控为辅,实现高精度热控,具体设计措施如下:
(1) 相机主体与卫星舱进行隔热以减小卫星舱温对相机主体的影响,增强相机热控独立性:相机主体外表面包覆多层隔热组件、相机底板与卫星舱板隔热安装。
(2) 对光学镜头、主体框、摆镜等关键部件的控温,采用间接控温方法:在蒙皮或热罩表面合理布置加热回路,通过控制热罩的温度间接实现对关键部件的温度控制。
(3) 有内热源并对温度要求高的CCD器件,布置独立的散热面,增强CCD温度控制精度。
发热量较大的相机电子学单机,主要依靠与卫星舱板的换热进行散热。
(4) 有热源但每轨工作周期短的器件,如摆镜驱动电机、制动器等:利用自身热容以及与其支架良好导热来减小温度波动。
地面模拟了在轨各种指定的工况条件,进行了热平衡试验,热控完全满足设计要求。
3 在轨关键指标测试
与传统相机在轨调试不同,“浦江一号”在轨调试有两大显著特点:一是出图快,卫星入轨第9圈(入轨后12 h后)相机即开机出图;二是在轨调试时间短。“浦江一号”相机紧贴用户需求,优化测试流程,仅用一个月就完成了在轨调试和测试。
在轨测试期间,卫星共执行了上百次测试成像任务,光学数据约38 GB。从回传的图像来看,图像层次丰富,质量良好。卫星光学相机入轨至今获取了多幅感兴趣目标的遥感影像。典型图像如图7所示,行驶中的游艇、飞行中的飞机清晰可见。

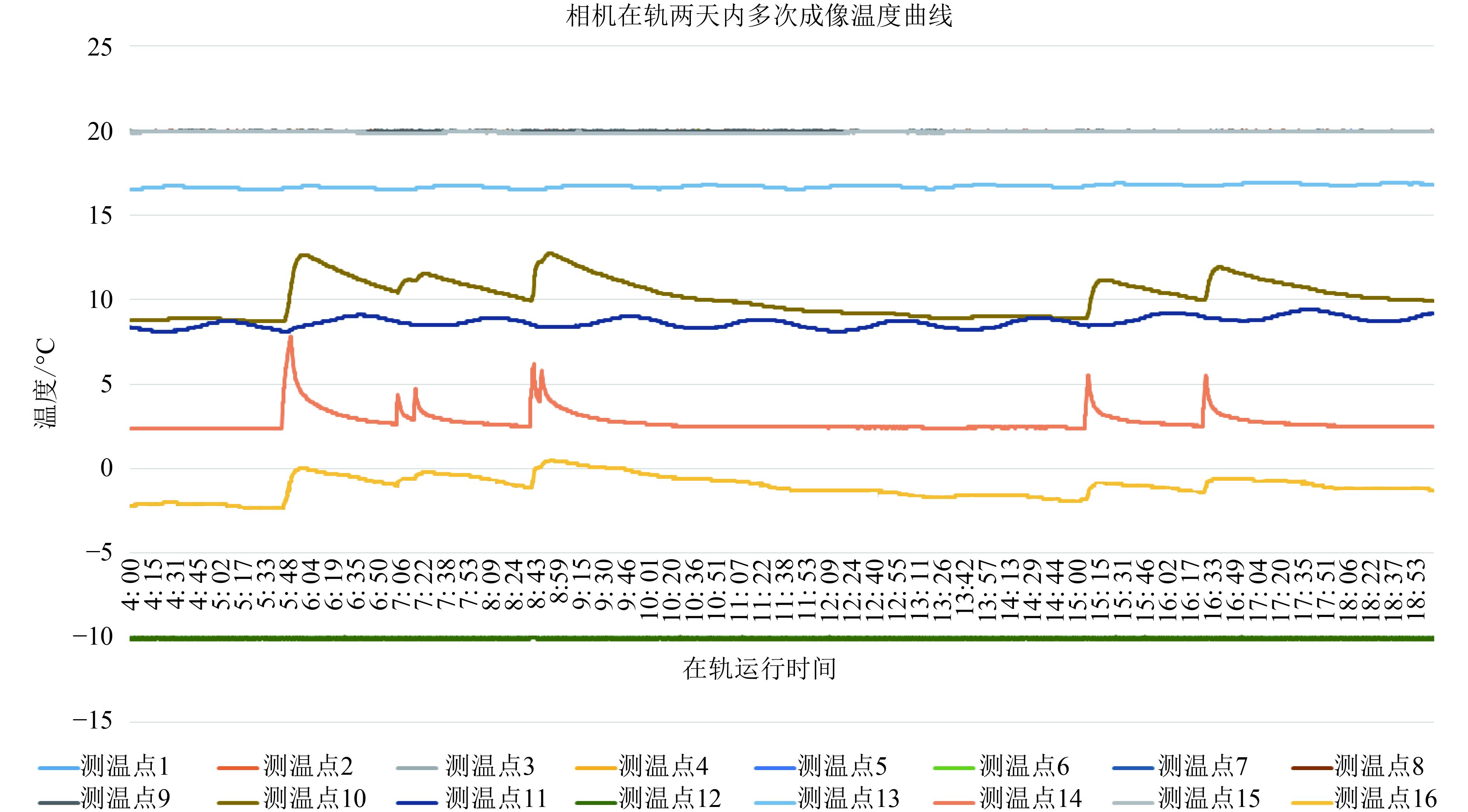
对在轨两天内多次开机的温度进行监测,曲线如图8所示,对比热控温度范围要求,说明热控完全满足设计要求。
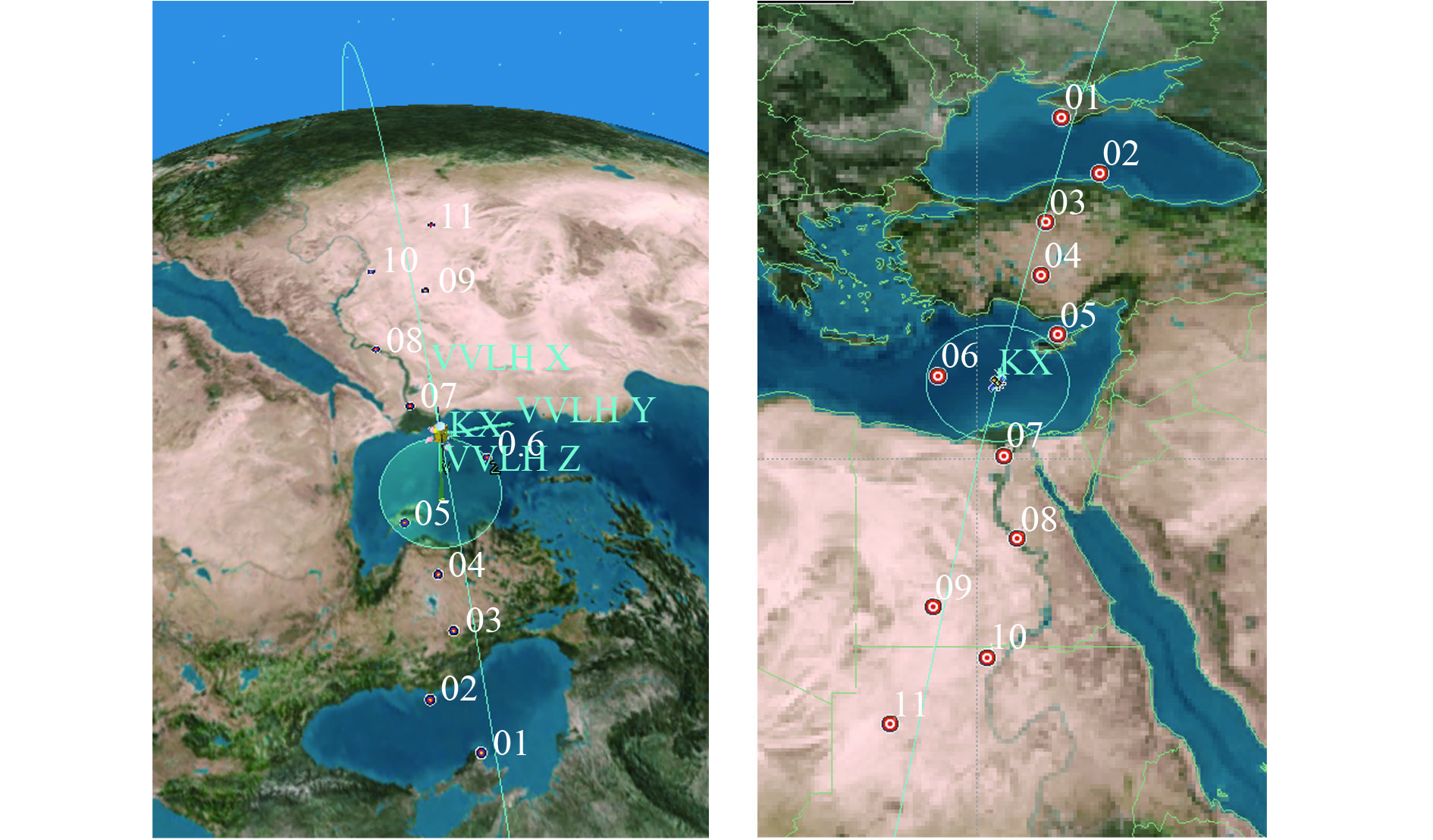
在某次成像测试中,相机连续成像8 min。在这8 min内,对黑海、地中海、北非附近的11个目标成像。相机利用摆镜快速摆动,成功的完成了所有目标点图像的采集。目标分布如图9所示。
相机的幅宽,地面像元分辨率(GSD)测试方法如下:利用相机对特定的区域成像,该区域地理位置坐标已经过精确标定,精度优于0.5 m。在遥感图像的垂轨或者沿轨方向上选定两点,通过这两点的位置坐标,可以计算得出两点之间的距离。利用该距离除以这两点间的像元数量,即可得到垂轨或者沿轨方向的地面像元分辨率(GSD)。幅宽即为垂轨方向地面像元分辨率(GSD)乘以像元数。结果分别见表1,表2,从表中数据可知,在轨星下点幅宽大于23 km,星下点GSD优于3 m。
表 1 幅宽测试结果
Table 1 The ground swath test results
| 成像时间 成像区域 | 侧摆角度/(°) | 星下点轨高/km | 像元数 | 垂轨方向长度/km | 测试结果/km |
| 2015-10-08北京 | –0.815 | 482.758 | 8192 | 23.62 | 23.62 |
| 2015-10-15北京 | –1.359 | 478.381 | 8192 | 23.71 | 23.70 |
| 2015-10-23上海 | 2.211 | 472.688 | 4018 | 11.35 | 23.12 |
| 2015-11-01太原 | 1.3247 | 471.047 | 5000 | 14.19 | 23.24 |
| 2015-10-17迪拜 | 3.307 | 472.683 | 3855 | 11.05 | 23.44 |
表 2 地面像元分辨率测试结果
Table 2 The GSD test results
| 图像 | 侧摆角度/(°) | 像元数 | 沿轨长度/m | 沿轨分辨率/m | 像元数 | 垂轨长度/m | 垂轨分辨率/m |
| 2015-11-01太原 | 1.3247 | 1130 | 3202 | 2.83 | 980 | 2755 | 2.81 |
| 2015-10-15北京 | –1.359 | 2532 | 7264 | 2.87 | 1306 | 3751 | 2.87 |
| 2015-10-23上海 | 2.211 | 2128 | 6093 | 2.86 | 1525 | 4394 | 2.88 |
| 2015-10-08北京 | –0.815 | 327 | 961 | 2.84 | 267 | 724.9 | 2.71 |
| 2015-10-08北京 | –0.815 | 114 | 317 | 2.78 | 98 | 281 | 2.84 |
对图像MTF的测算采用刃边法。刀刃法是通过计算图像刃边边缘扩散函数,继而计算线扩散函数,再求得MTF。测算方法详见参考文献赵占平(2009)。利用2015年10月7日包头靶标图像,采用刃边法计算沿轨方向和垂轨方向的MTF,结果如表3所示,满足设计要求。
表 3 不同方向MTF计算结果
Table 3 The MTF calculation results in different direction
| 原图 | 图像增强后 | |||
| MTF测试方向 | 沿轨 | 垂轨 | 沿轨 | 垂轨 |
| MTF测试结果 | 0.05 | 0.13 | 0.06 | 0.23 |
信噪比(SNR)反映了图像的“干净”程度,其值的高低直接影响图像的空间分辨率以及图像的分类精度。目前,遥感器在轨信噪比的计算有很多种,例如方差法、局部方差法和去相关法。本文SNR计算采用刘建贵等人(1999)提出的分块统计法。
选取2015年10月17日迪拜海面中50×50区域大小的图像,用以评价低端区域的信噪比;选取2015年10月20日丽江雪山中50×50区域大小的图像,用以评价高端区域的信噪比。结果如表4所示,满足指标要求。
表 4 不同图像信噪比测试结果
Table 4 The SNR test results
| 地物 | 平均值(DN值) | 标准偏差 | SNR/dB | 指标要求/dB |
| 2015-10-17迪拜海面 | 152.7 | 1.5769 | 39.72 | ≥30 |
| 2015-10-20丽江雪山 | 950.6 | 7.31 | 42.28 | ≥40 |
4 结 论
通过“浦江一号”相机的研制和在轨测试,对轻小型、高集成度可见光载荷的技术特点和研制流程进程初步的探索,积累了一定的经验。“浦江一号”整机重量约30 kg,在同等功能和技术指标的下,本设计相对于传统设计整机重量减轻约25%。“浦江一号”相机设计的创新性体现在以下3个方面:
(1) 利用摆镜机构实现多目标快速指向,在一个成像周期内完成多目标成像,反应时间短,成像效率高。
(2) 电子学设备采用标准的即插即用通讯接口以及小型高速数传接口,实现了设备快速组装和测试,符合模块化设计潮流。电路采用集成化设计,减少了设备数量,从而减少整个系统的体积、重量和功耗。
(3) 结合用户需求,优化在轨测试流程,1个月内就完成相机的全部测试和评估工作。
由于研制成本及周期的限制,相机研制过程也存在不足之处,例如相机主体采用了常规的材料以及加工工艺。如采用轻质高性能材料,整机重量还有进一步减小的空间。下一步工作将主要针对主体结构的材料及加工工艺进行优化。
总之,通过“浦江一号”相机的研制,掌握了轻小型、高集成度可见光载荷所需的各项关键技术,为后续高性能轻小型相机的设计提供了有力的技术支撑。
参考文献(References)
-
Chang X, Zhang P, Li K, Shi C H and Sun Q G. 2014. Design of high precision control of space camera temperature controlling. Computer Measurement and Control, 22 (7): 2274–2276. [DOI: 10.3969/j.issn.1671-4598.2014.07.083] ( 常霞, 张鹏, 李恺, 史翠红, 孙琼阁. 2014. 一种轻小型遥感相机高精度主动热控设计. 计算机测量与控制, 22 (7): 2274–2276. [DOI: 10.3969/j.issn.1671-4598.2014.07.083] )
-
Chen D Y, Wang K and Li T. 2010. The design and implementation of space high-speed bus Spacewire codec. Spacecraft Recovery and Remote Sensing, 31 (4): 58–64. [DOI: 10.3969/j.issn.1009-8518.2010.04.010] ( 陈大羽, 王琨, 李涛. 2010. 空间高速总线Spacewire节点的设计与实现. 航天返回与遥感, 31 (4): 58–64. [DOI: 10.3969/j.issn.1009-8518.2010.04.010] )
-
Guo J C. 2009. Technical analysis of high resolution commercial optical remote sensing satellite. Spacecraft Engineering, 18 (2): 83–89. [DOI: 10.3969/j.issn.1673-8748.2009.02.014] ( 郭今昌. 2009. 商用高分辨率光学遥感卫星及平台技术分析. 航天器工程, 18 (2): 83–89. [DOI: 10.3969/j.issn.1673-8748.2009.02.014] )
-
Huang W, Wang X M and Yu S Q. 2014. Highly-integrated video processing FPGA software design of a remote sensing camera. Acta Electronica Sinica, 42 (11): 2303–2309. [DOI: 10.3969/j.issn.0372-2112.2014.11.027] ( 黄伟, 王旭明, 于生全. 2014. 一种轻小型遥感相机视频处理FPGA软件设计. 电子学报, 42 (11): 2303–2309. [DOI: 10.3969/j.issn.0372-2112.2014.11.027] )
-
Liu J G, Zhen L F and Tong Q X. 1999. Estimation of signal to noise ratio of remote sensing images. Journal of Basic Science and Engineering, 7 (4): 360–365. ( 刘建贵, 郑兰芬, 童庆禧. 1999. 遥感图象信噪比的估算. 应用基础与工程科学学报, 7 (4): 360–365. )
-
Yao N. 2010. Development status of fast response satallite: architecture and key technologies // Proceedings of the 23rd Proceeding of National Conference on Space Exploration. Xiamen: China Space Science Society: 55–62 (姚娜. 2010. 快速响应空间体系结构及关键技术发展现状 // 第二十三届全国空间探测学术交流会论文集. 厦门: 中国空间科学学会: 55–62)
-
Yao T Y. 2015. Changzhen-11 rocket launched. Space Exploration (11): 28 [DOI: 10.3969/j.issn.1009-6205.2015.11.008] ( 姚天宇. 2015. 长征十一号火箭弯弓射苍穹. 太空探索 (11): 28 [DOI: 10.3969/j.issn.1009-6205.2015.11.008] )
-
Zhao Z P, Fu X K, Huang Q L and Li Y Q. 2009. On orbit MTF test research of remote sensors based on knife-edge method. Spacecraft Recovery and Remote Sensing, 30 (2): 37–43. [DOI: 10.3969/j.issn.1009-8518.2009.02.006] ( 赵占平, 付兴科, 黄巧林, 李永强. 2009. 基于刃边法的航天光学遥感器在轨MTF测试研究. 航天返回与遥感, 30 (2): 37–43. [DOI: 10.3969/j.issn.1009-8518.2009.02.006] )


