
|
收稿日期: 2016-06-13; 修改日期: 2016-12-28; 优先数字出版日期: 2017-01-05
基金项目: 国家自然科学基金青年科学基金(编号:41501360);中国博士后科学基金(编号:2015M570109);中国科学院青藏高原环境变化与地表过程重点实验室开放基金(编号:TEL201503)
第一作者简介: 彭学峰(1989— ),男,硕士研究生,研究方向为GNSS-R理论及土壤水分遥感应用。E-mail:
pengxf@most.cn
通讯作者简介: 万玮(1986— ),女,助理研究员,研究方向为GNSS-R遥感理论、方法及应用,水循环遥感等。E-mail:
wanweilizzy@tsinghua.edu.cn
中图分类号: TP722.6
文献标识码: A
|
摘要
利用GNSS-R(Global Navigation Satellite System-Reflectometry)技术探测土壤水分是近年来一个新兴的研究方向。目前GNSS-R遥感观测中反射信号的接收与处理方式包括单天线与多天线两种模式,面向实际应用需求,GNSS-R遥感正在实现从最初的地基观测向空基、星载观测的转变。在推进GNSS-R土壤水分遥感技术业务化应用的过程中,必须首先进行适宜性分析,确定该技术探测的地理位置、空间分辨率与探测深度,然而目前对此尚未有系统、全面、定量的论述。本文针对适宜性分析中的3个关键因子分别进行理论分析与公式推导,明确相关概念的定义,并实现定量化描述,最终通过实际应用分析进一步诠释其应用价值。对于单天线模式地基观测,以美国板块边界观测计划PBO (Plate Boundary Observatory)土壤水分产品为例,分析镜面反射点的相对位置、第一级Fresnel反射椭圆簇的面积与时间序列土壤水分所代表的探测深度;对于多天线模式,以郑州上街区农田空基观测试验为例,得到基于航迹的栅格土壤水分空间分布并探讨其探测深度。本文能够为未来两种观测模式下地基、空基和星载GNSS-R遥感观测、北斗反射信号遥感,以及GNSS-R在农业、水文、生态等领域的实际应用提供理论指导。
关键词
GNSS-R, 土壤水分, 镜面反射点, 分辨率, 探测深度
Abstract
Soil moisture measurements are important to hydrology, climatology, and agriculture. Global Navigation Satellite System reflectometry (GNSS-R) is a new and powerful tool for sensing soil moisture. Different methods have been proposed for the reception and processing of reflected signals, such as multiantenna and single-antenna patterns. Considerable efforts have been made on ground-based and airborne observations. Meanwhile, a number of space-borne missions have also been implemented. During the suitability analysis of soil moisture remote sensing via GNSS-R technique, three key factors have to be determined—the specular reflection point, spatial pixel size, and sensing depth in the soil—regardless of the extraction methods of the reflected signals or the types of the observation platform. However, no relatively comprehensive explanations are available in the current literature. Theoretical analysis and formula derivation are conducted to systematically and quantitatively determine the extent of soil detection in three dimensions from the abovementioned aspects. First, the geographical position of the specular reflection point on the WGS84 ellipsoid surface is determined with an iterative algorithm. The effect of elevation between the real ground surface and the ellipsoid is discussed. Second, the first Fresnel zone is defined as the spatial pixel of the GNSS-R technique. The size of the pixel is regarded as the spatial resolution based on the concept of the equi-delay ellipse. Thirdly, the penetration distance of GNSS signals in soil is expressed. The concept of sensing depth is proposed on penetration distance and is based on the theory of microwave remote sensing. This concept makes soil moisture detection more describable and comparable. To further analyze the feasibility of soil moisture remote sensing with GNSS-R, the results of two application scenarios are shown: (1) A ground-based GPS measurement was performed in Marshall, Colorado, US, from the Plate Boundary Observatory. This measurement corresponds to the single-antenna pattern. The relative location of the specular reflection points, average area of the first Fresnel ellipse clusters, and sensing depth of the time-series soil moisture are analyzed. (2)An airborne GNSS-R experiment was conducted in Zhengzhou to obtain soil moisture content. This measurement corresponds to the multiantenna pattern. The spatial distribution of estimated soil moisture with a certain resolution based on flight tracks and relevant sensing depth are manifested. The results of the ground-based GPS measurement and airborne GNSS-R experiment are reasonable and convincing. Given that this study determined the extent of detected soil in three dimensions, this work provides theoretical basis for the precision evaluation of retrieved soil moisture. BeiDou mainly differs from GPS in the carrier frequency for remote sensing using GNSS reflected signals. Therefore, the results of this study provide references for future development of the BeiDou-R technique in China.
Key words
GNSS-R, soil moisture, specular reflection point, resolution, sensing depth
1 引 言
作为全球导航卫星系统GNSS (Global Navigation Satellite System)遥感的一个重要分支,GNSS反射信号遥感GNSS-R (GNSS Reflectometry)技术是近年来新兴的研究方向。GNSS-R利用导航卫星提供的长期稳定、高时空分辨率、测距码调制的L波段微波信号,兼具主动雷达与被动辐射计的优点 (李黄 等,2013),在海面高度、海面风场、海冰探测、植被状态、土壤水分、积雪深度等应用领域都呈现出了巨大的潜力(Jin和Komjathy,2010;Jin 等,2011;Garrison 等,2014)。目前各类地基、空基乃至星载观测试验蓬勃开展,各国均在大力推动相关应用(刘经南 等,2007;Jin和Komjathy,2010)。继2003年英国发射UK-DMC卫星携带GPS反射信号接收设备后(Gleason,2006),国际上对GNSS-R星载观测的探索迅速发展,如2014年英国发射的TDS-1卫星搭载了SGR-ReSI传感器进行GNSS-R测量(Jales和Unwin,2015),目前已有用于土壤水分反演的研究(Chew 等,2016)。美国宇航局NASA已于2016年12月发射CYGNSS观测星座([2016-12-28] https://www.nasa.gov/cygnss),欧空局ESA也正在部署GEROS-ISS (Wickert 等,2013)与PARIS IoD (Martín-Neira 等,2011)观测计划,中国科技部国家重点研发计划“地球观测与导航”重点专项也已将GNSS-R星载观测纳入规划,未来将会有丰富的GNSS-R数据用于地球表面参数测量。
土壤水分是农业、水文、气象和生态等领域的重要参数,近年来国内外学者已在地基、空基GNSS-R土壤水分遥感领域开展了大量研究工作。2002年NASA首次在SMEX02 (Soil Moisture Experiment 2002)试验中加入了GPS双基雷达测量,证明反射信号强度与土壤水分时空相关(Masters 等,2004)。ESA分别于2009年3—9月与2011年7、8月在意大利开展了陆面GNSS-R地基与空基试验,采集RHCP直射信号与RHCP/LHCP反射信号,结果表明RHCP与LHCP反射系数的比值可作为土壤水分的可靠观测量(Egido 等,2012,2014)。西班牙加泰罗尼亚理工大学在2013年—2015年期间多次开展地基与空基GNSS-R土壤水分试验,进行直射与反射GNSS信号的多极化测量,并考虑了仪器参数对计算反射系数的影响(Alonso-Arroyo 等,2013,2014,2015)。随着无人机成为一种新的遥感平台,目前已有基于无人机的GNSS-R土壤水分反演研究(Troglia Gamba 等,2015)。在GNSS直射与反射信号干涉研究方面,Larson等人(2010)利用地壳形变监测网中的GPS信噪比SNR (Signal-to-Noise Ratio)数据提出了GPS-MR (GPS-Multipath Reflectometry)土壤水分测量技术。Rodriguez-Alvarez等人(2009)利用特制的接收机与垂直极化天线提出了IPT (Interference Patern Technique)土壤水分测量技术。国内对于GNSS-R土壤水分遥感的研究起步较晚,早期工作涉及模型验证与原理分析(关止 等,2006;毛克彪 等,2009),后续也开展了多次地基土壤水分试验,表明GNSS-R估算的土壤水分与实测值一致(严颂华 等,2011;宋学忠 等,2013),并且已开展对北斗反射信号土壤水分反演的方法研究(杨磊 等,2016)。2014年国内多家单位联合开展了GNSS-R空基观测试验,估算结果能够良好反映研究区域土壤水分的空间分布特征(Wan 等,2015)。国内研究也有针对GPS-MR与IPT技术的探讨,如敖敏思等人(2015)实现了利用GPS SNR数据中的多路径反射分量对土壤水分变化趋势的指数模拟。
万玮等人(2015)根据反射信号的接收与处理方式的不同,将GNSS-R遥感观测统一归纳为单天线与多天线两种观测模式。对于土壤水分观测,两种观测模式的最终目标均是从科学研究走向业务应用。因此针对实际应用需求,无论是从干涉信号中分离反射分量的单天线模式,还是独立测量反射信号的多天线模式,无论是地基GNSS-R观测,还是空基与星载测量,都必须首先开展土壤水分遥感适宜性分析,确定信号反射发生的地理位置、反射信号来自的地表范围、以及携带信息所代表的土壤深度,即GNSS-R的镜面反射点、空间分辨率与探测深度。国外研究对以上问题已有分散涉及,如Torres(2004)分析了真实地表的椭球高度对确定镜面反射点的影响,Katzberg等人(2006)提出可用第一“Fresnel反射区”作为GNSS-R遥感的空间分辨率,Larson等人(2010)对GNSS信号在土壤中的探测深度进行了试验测量等,但目前对此尚缺少整体性、系统性及定量性分析。本文首先从理论角度进行诠释,给出通用的数学描述以及针对特殊观测条件的考虑,然后分别针对单天线模式和多天线模式的地基、空基观测,以美国PBO土壤水分产品和郑州农田航空观测为例,分别进行实际应用探讨,为GNSS-R土壤水分遥感的科学研究及行业应用提供参考。
2 GNSS-R土壤水分遥感适宜性的理论分析
为推进GNSS-R土壤水分遥感的科学研究及业务应用进程,必须从3维空间的角度明确GNSS反射信号探测的土壤范围。镜面反射点能够确定空间位置,空间分辨率与探测深度则能够确定探测的土壤立方体大小。由于土壤水分信息的“记录”发生在GNSS信号经地表的反射过程中,因此以下GNSS-R土壤水分遥感适宜性分析同时适用于单天线与多天线两种观测模式。
2.1 GNSS信号镜面反射点
在直射信号与反射信号的几何关系中,使得发射机-地表-接收机之间距离最短的点被称作镜面反射点,是进行GNSS-R测量与建模的重要参考点,经过该点的GNSS信号入射角等于反射角。对于地基观测,天线高度一般在2—3 m,观测地表可看作平面,镜面反射点可利用卫星高度角与方位角及简单的几何关系计算;对于空基与星载观测,观测平台高,观测到的地表必须用曲面表示。
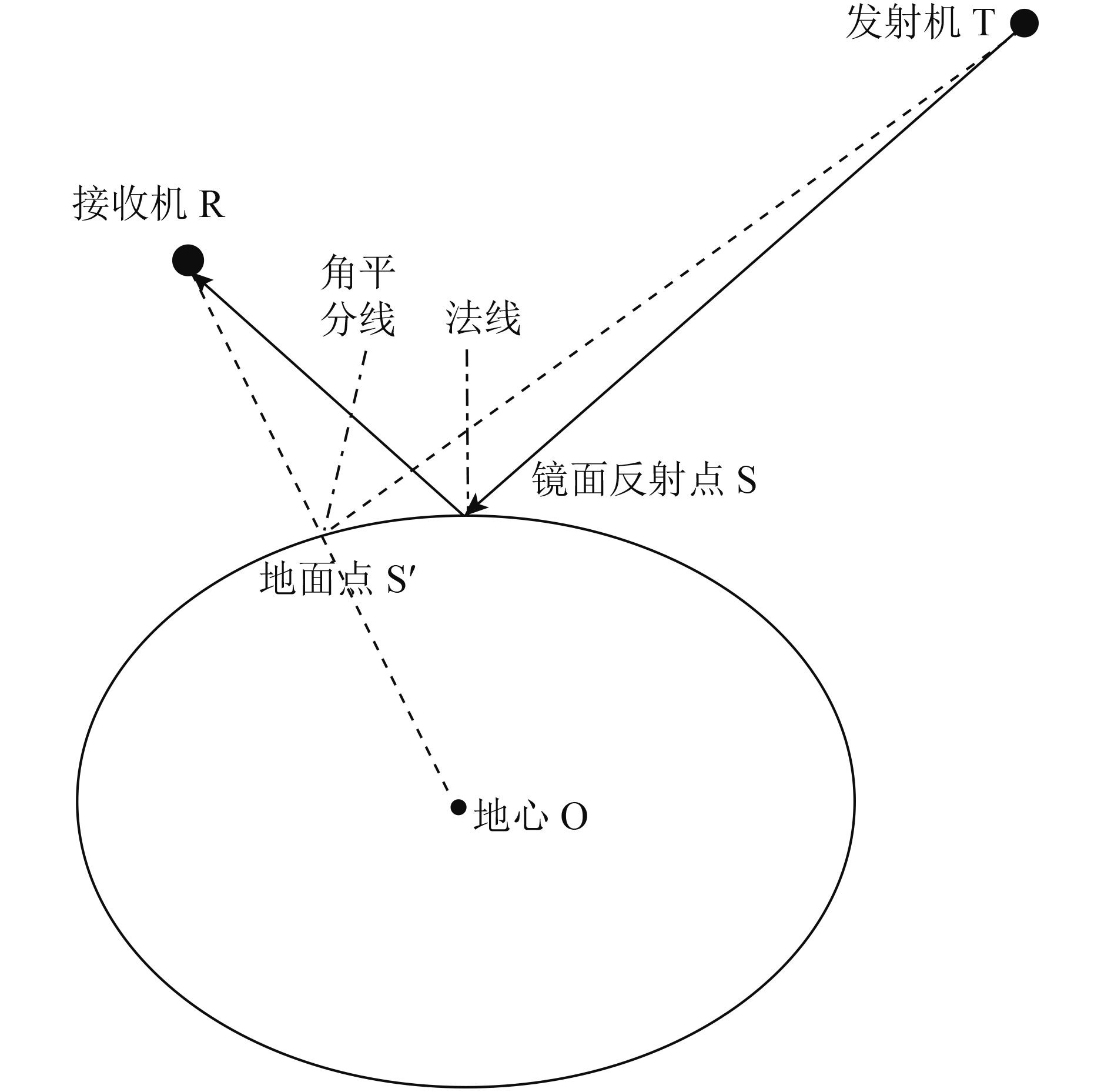
GPS广播星历所使用的是WGS84坐标系统,与之对应的WGS84椭球用作地球表面简单有效的几何近似,图1展示了GNSS-R观测系统的几何关系,已知发射机T与接收机R的位置后,可以利用迭代的方法求解镜面反射点S:以接收机R与地心O连线和地面的交点S′为初始点,然后以S′R与S′T角平分线的指向为移动方向,不断移动地面点S′,当S′的移动量小于设定的阈值后可认为S′即为镜面反射点S,此时SR与ST角平分线即为过曲面上点S的法线。

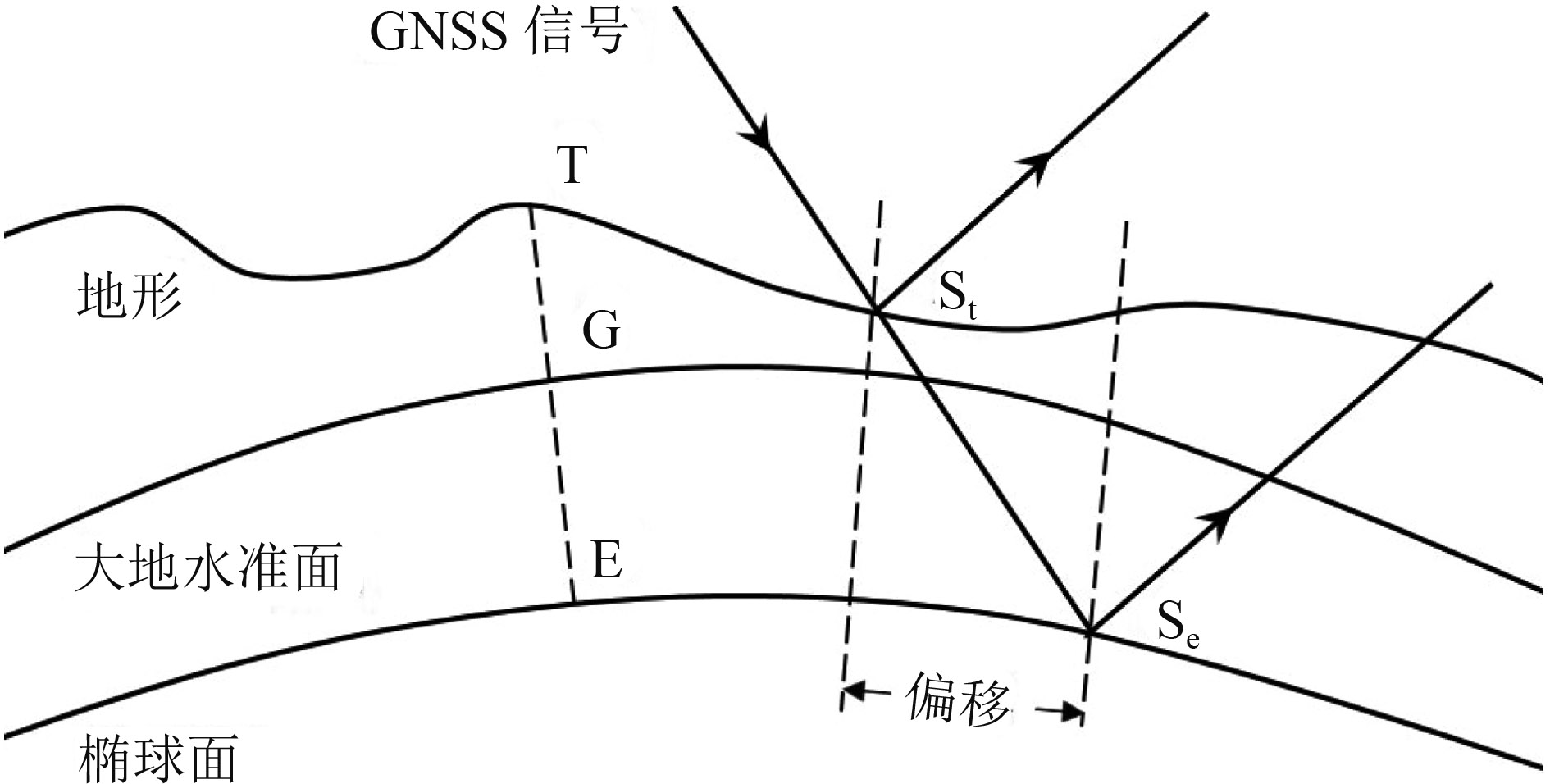
但是,利用WGS84椭球近似地球表面存在一定的误差,还需考虑大地水准面与地形高度。大地水准面是等重力势面,对应于全球平均海平面,更符合地球的自然形状。与椭球面相比,大地水准面高度可以相差几十米。相对于大地水准面测量的高度称为海拔高度,是在大量地形图、数字数据集中常见的高度类型(Kaplan和Hegarty,2005)。图2展示了大地水准面与地形高度对镜面反射点的影响,椭球高度ET为大地水准面高度EG与海拔高度GT之和。如果只考虑了椭球面,而未考虑大地水准面与地形高度,在确定镜面反射点的过程中会造成一定的偏移,如图2所示,Se为只考虑椭球面的镜面反射点,St为综合考虑大地水准面与地形高度后的镜面反射点。假设真实地表与WGS84椭球高度差为Δh,则镜面反射点的经纬度偏移(Δlat,Δlon)分别为(Torres,2004):
| $\Delta lat = \frac{{\Delta h \cdot \cot \gamma \cdot \cos \varphi }}{{{R_{\rm{e}}}}},\quad \Delta lon = \frac{{\Delta h \cdot \cot \gamma \cdot \sin \varphi }}{{{R_{\rm{e}}} \cdot \cos y}}$ | (1) |
式中,γ与φ分别为GNSS卫星相对于镜面反射点的高度角与方位角,y为镜面反射点处的纬度,该处的椭球半径Re可由WGS84椭球半长轴ae与半短轴be求得:
| $R_{\rm{e}}^2 = \frac{{b_{\rm{e}}^2}}{{1 + \left( {b_{\rm{e}}^2/a_{\rm{e}}^2} \right) \cdot \sin y}}$ | (2) |
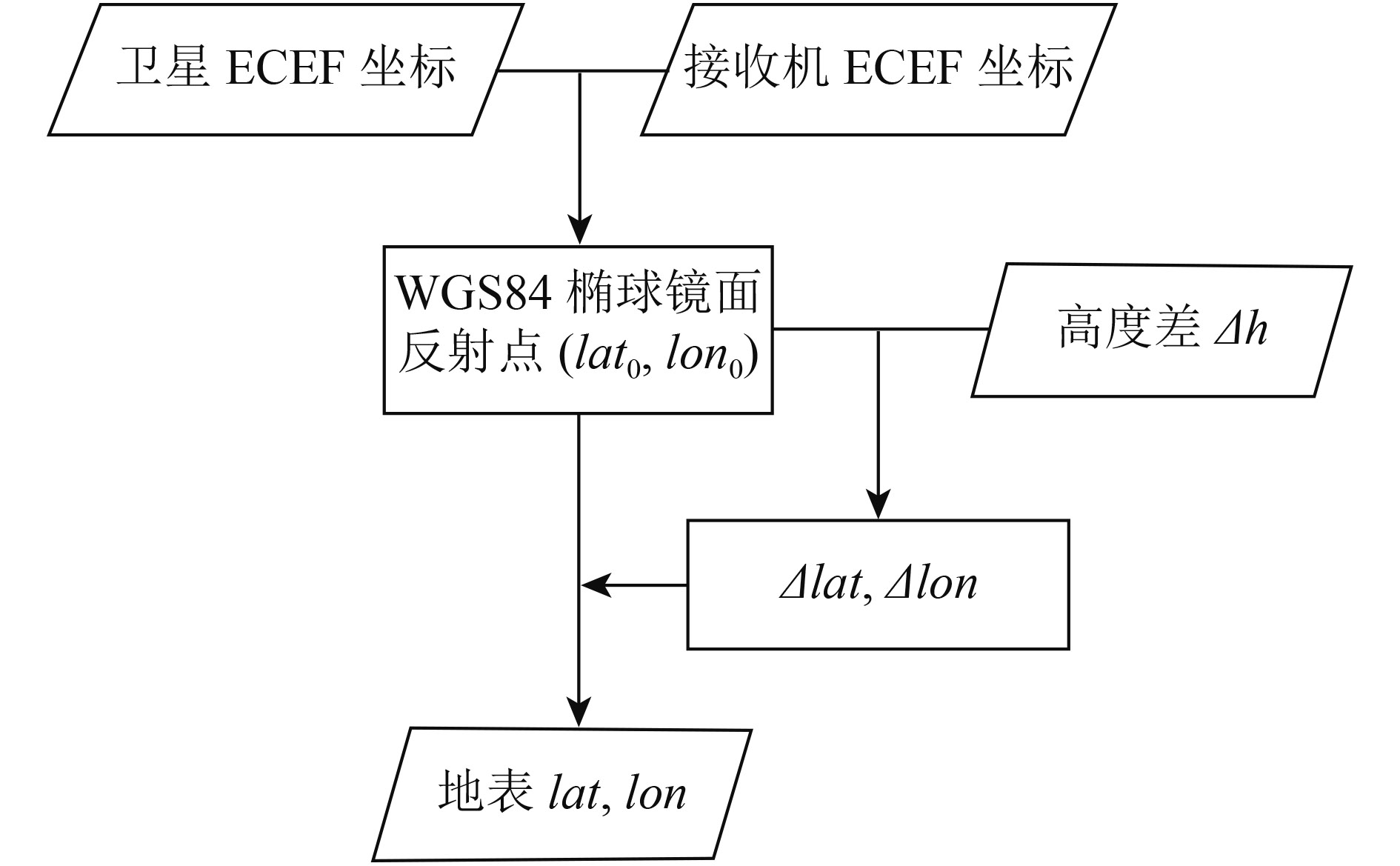
已知GNSS卫星与接收机在地心地固ECEF (Earth-Centered Earth-Fixed)坐标系中的XYZ坐标,则可以得到WGS84椭球体上的镜面反射点经纬度,再考虑真实地表与WGS84椭球面的高度差Δh,即可得到经纬度的改变量,与WGS84椭球经纬度相加,最终得到真实地表上镜面反射点的经纬度,总体流程如图3所示。
2.2 GNSS-R遥感空间分辨率
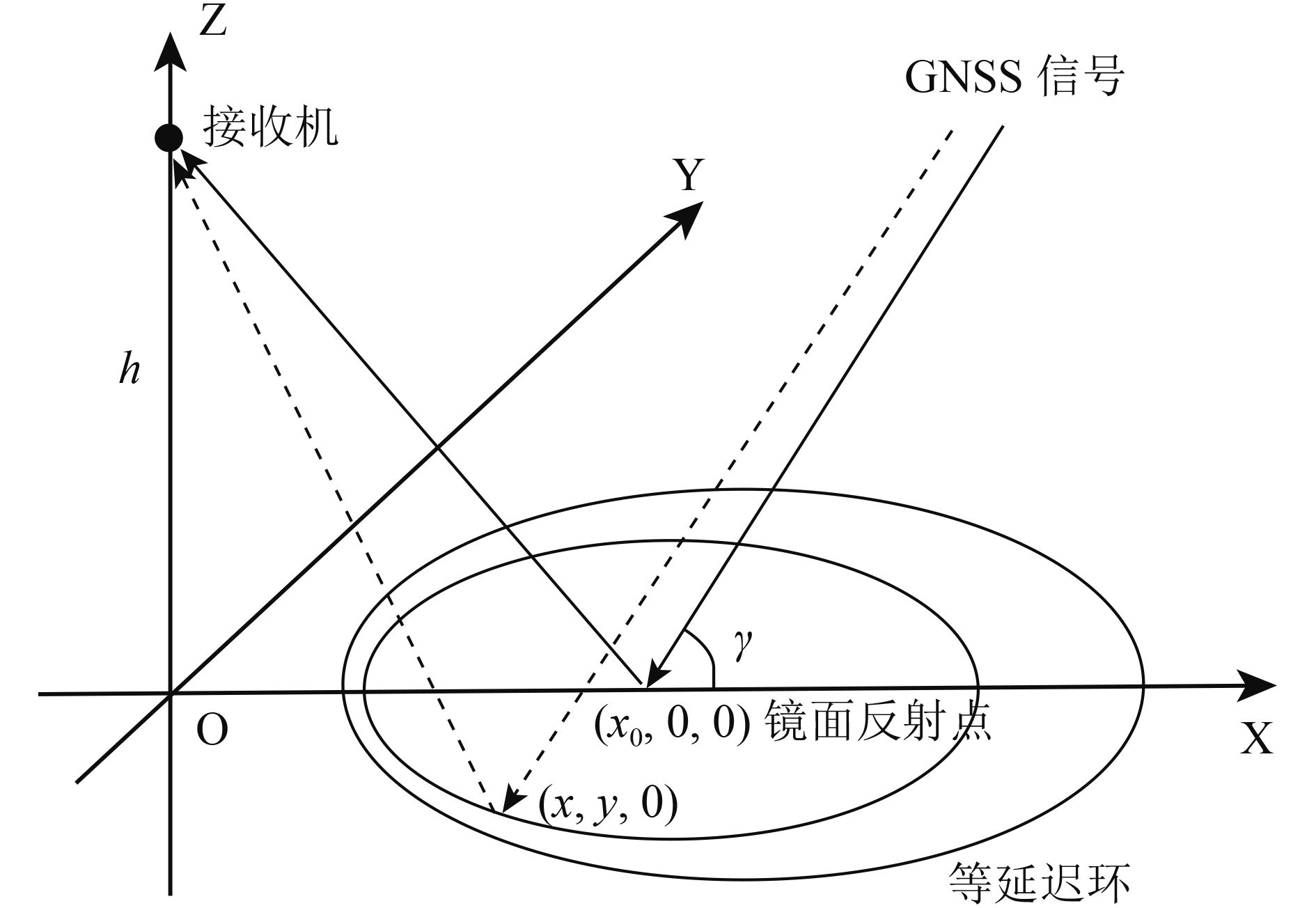
在GNSS-R测量系统中,以地面为X-Y平面,过接收机且指向天顶的方向为Z轴,建立右手直角坐标系,如图4所示。GNSS信号以掠射角γ经地表镜面反射点(x0,0,0)反射后到达高度为h的接收机,该信号行程最短。如果经过点(x,y,0)反射的信号也会被接收,令经过该点的信号行程与经过镜面反射点的信号行程之差为δ,则(Katzberg和Garrison,1996):
| $\delta = \sqrt {{x^2} + {y^2} + {h^2}} - x\cos \gamma - h\sin \gamma $ | (3) |
在X-Y平面上点(x,y)的轨迹为椭圆,其半长轴a与半短轴b分别为
| $a = \frac{{\sqrt {{\delta ^2} + 2\delta h\sin \gamma } }}{{{{\sin }^2}\gamma }},\quad b = \frac{{\sqrt {{\delta ^2} + 2\delta h\sin \gamma } }}{{\sin \gamma }}$ | (4) |
椭圆中心的坐标为
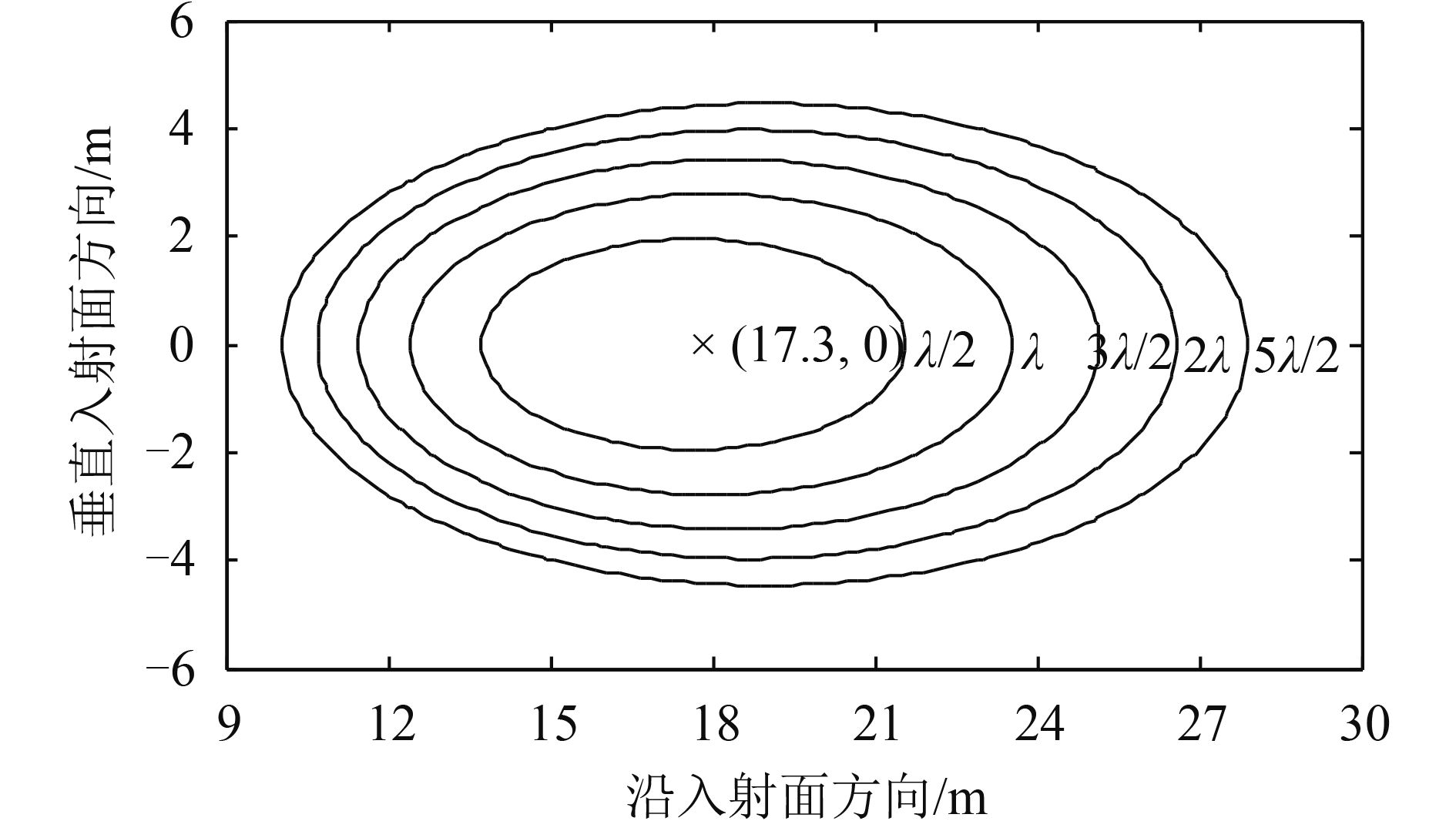
当接收机高度为10 m,GNSS信号掠射角为30°,δ分别取λ/2、λ、3λ/2、2λ、5λ/2时(对于GPS L1波段,λ=0.19 m),等延迟环的大小与形状如图5所示。其中接收机在地面投影的坐标为(0,0),镜面反射点位置如图中“×”所示,等延迟环对应的δ由内向外依次增大。
如果地表与入射波长的关系符合Fraunhofer判据,即地表对L波段微波近似光滑,一个典型的近似是用λ/2替代δ,从而确定椭圆的位置与大小,这样的椭圆被称作第一级“Fresnel反射区”,因为是双基雷达的“主反射区”,所以其大小可以看作GNSS-R遥感的空间分辨率(Katzberg 等,2006)。由半长轴a及半短轴b可得第一级“Fresnel反射区”的面积为
| $S = {\rm{\pi }}ab = \frac{{{\rm{\pi }}\left( {{\delta ^2} + 2\delta h\sin \gamma } \right)}}{{{{\sin }^3}\gamma }} = \frac{{{\rm{\pi }}\lambda \left( {\lambda + 4h\sin \gamma } \right)}}{{4{{\sin }^3}\gamma }}$ | (5) |
式(5)即可视作GNSS-R土壤水分遥感的空间像元大小。以GPS L1(1575.42 MHz)波段为例,假设地基天线高度为2 m,空基高度为1 km,低轨卫星高度为700 km,GNSS卫星高度角分别为30°,50°与70°,则由式(5)得到的空间分辨率如表1所示。因为星载GNSS-R的空间分辨率在卫星高度角为30°时也仅为1.7 km2,所以在估算的情况下地球曲率的影响可以忽略,第一级“Fresnel反射区”仍可近似为平面。以上论述是以地表水平为前提,即第一级“Fresnel反射区”的面积是正射投影后的大小,如果地表有一定坡度,在正射投影面积的基础上还需考虑坡度的余弦值。因为北斗B1(1561.098 MHz)波段频率与GPS L1波段频率非常接近,因此相同条件下GNSS-R遥感空间分辨率基本相同。需要指出的是,无论地基、空基或星载观测平台,GNSS-R土壤水分遥感的空间分辨率,均可量化为介于常规卫星遥感和地面点实测的分辨率之间,很好的实现多种手段在观测尺度上的优势互补。
表 1 不同观测平台高度与卫星高度角下GPS L1波段GNSS-R空间分辨率
Table 1 The GNSS-R spatial resolutions for the GPS L1 waveband under varied observation platform heights and satellite elevation angles
| /m2 | |||
| 平台高度 | 卫星高度角/(°) | ||
| 30 | 50 | 70 | |
| 地基2 m | 5.0 | 2.1 | 1.4 |
| 空基1 km | 2.4×103 | 1.0×103 | 0.7×103 |
| 星基700 km | 1.7×106 | 0.7×106 | 0.5×106 |
2.3 GNSS信号土壤探测深度
对于给定频率的电磁波,土壤介电常数一般是土壤水分、体积密度、土壤成分、温度与盐度的函数,而土壤水分对介电常数的影响最大(Ulaby 等,1986b)。电磁波能量衰减到1/e时在介质中的传播距离为穿透距离,如图6中的δp,土壤湿度不同会产生不同程度的衰减(Ulaby 等,1986a),从而改变信号的穿透距离。
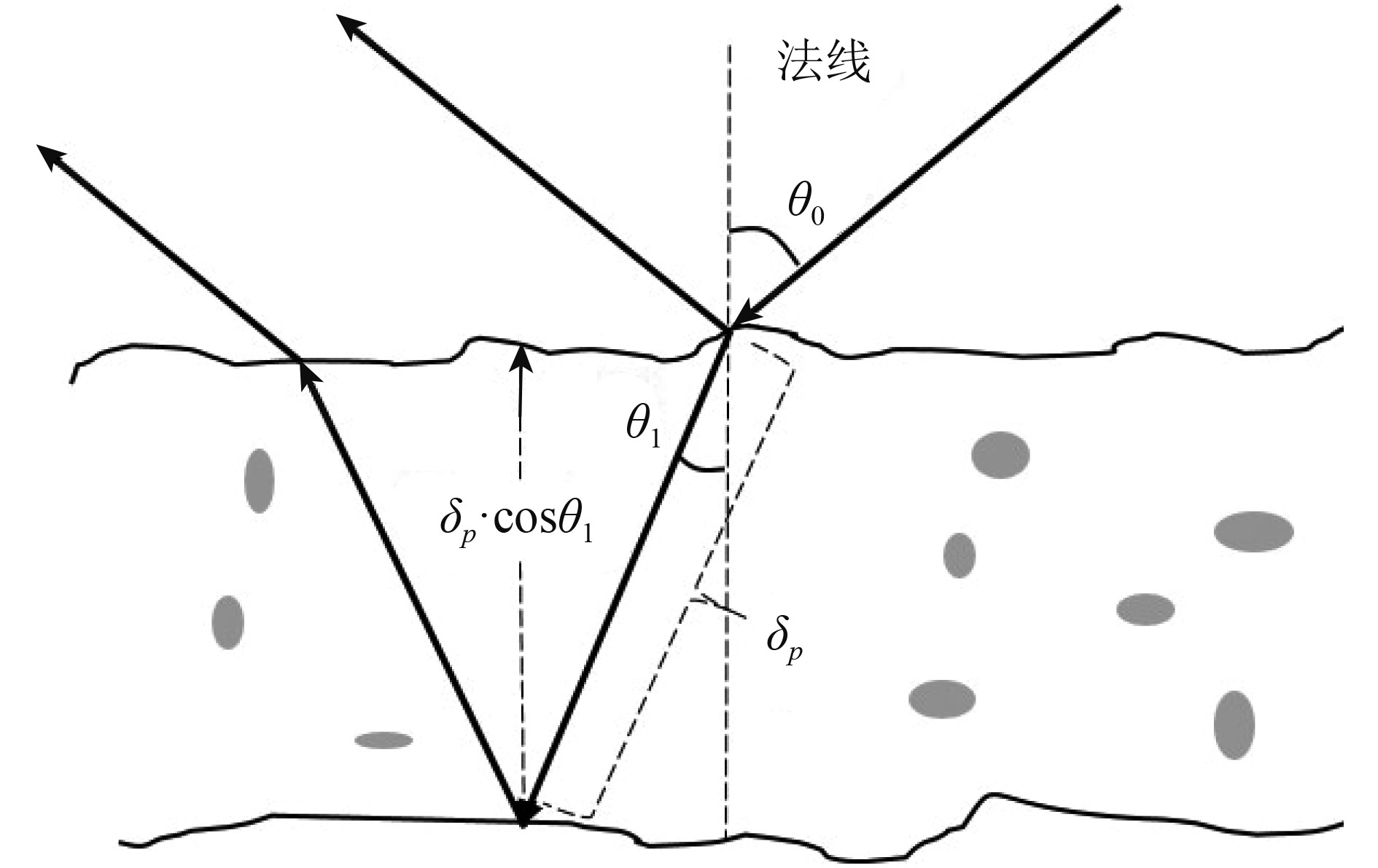
不考虑非常干燥的土壤,电磁波的穿透距离大约在λ与0.1λ之间,λ对应体积土壤含水量mv≈0.04 cm3/cm3,0.1λ对应非常潮湿的土壤。在图6中,探测深度为δp·cosθ1,θ1为入射角为θ0的信号在土壤中的折射角。对于介电常数均一的土壤,信号与土壤作用后以与法线夹角θ0的方向辐射出去的能量中,63%来自探测深度(Ulaby 等,1986b)。因此,由反射信号估算得到的主要是探测深度范围内的土壤水分信息。
根据电磁波理论,有损均匀介质中的平面波传播方程(Ulaby 等,1981)为
| ${E}\left( z \right) = {{E}_0}\left( z \right) \cdot {\rm{exp}}\left( { - {\rm{j}}\omega \sqrt {\mu {\varepsilon _c}} \cdot z} \right)$ | (6) |
式中,
E
为电场矢量,
| ${\rm{j}}\omega \sqrt {\mu {\varepsilon _c}} = {\rm{j}}\omega \sqrt {\mu {\varepsilon _0} \cdot {\varepsilon _r}} = {\rm{j}} \cdot \frac{{2{\rm{\pi }}}}{\lambda }\sqrt {{\varepsilon _r}} \, = \alpha + {\rm{j}} \cdot \beta $ | (7) |
式中,εr为相对复介电常数,可表示为
| $\alpha = \frac{{2\pi}}{\lambda }\left| {Im\left( {\sqrt {{\varepsilon _r}} } \right)} \right| = \frac{{ \pi \varepsilon _r{''}}}{{\lambda \sqrt {\varepsilon _r'} }}$ | (8) |
因为对于微波波段,土壤相对复介电常数的虚部远小于实部,所以可以对
假设电磁波在土壤-空气界面处功率为p(0),则电磁波在土壤中传播距离
| $p(z) = p(0) \cdot {{\rm e}^{ - 2\alpha z}}$ | (9) |
当p(
| ${\delta _p} = \frac{1}{{2\alpha }}{\rm{ = }}\frac{{\lambda \sqrt {\varepsilon _r'} }}{{2{\rm{\pi }}\varepsilon _r{''}}}$ | (10) |
折射角θ1与入射角θ0的关系可由土壤对微波的折射率n1确定(Ulaby 等,1981):
| $\frac{{\sin {\theta _0}}}{{\sin {\theta _1}}} = {n_1} = \sqrt {\varepsilon _r'} $ | (11) |
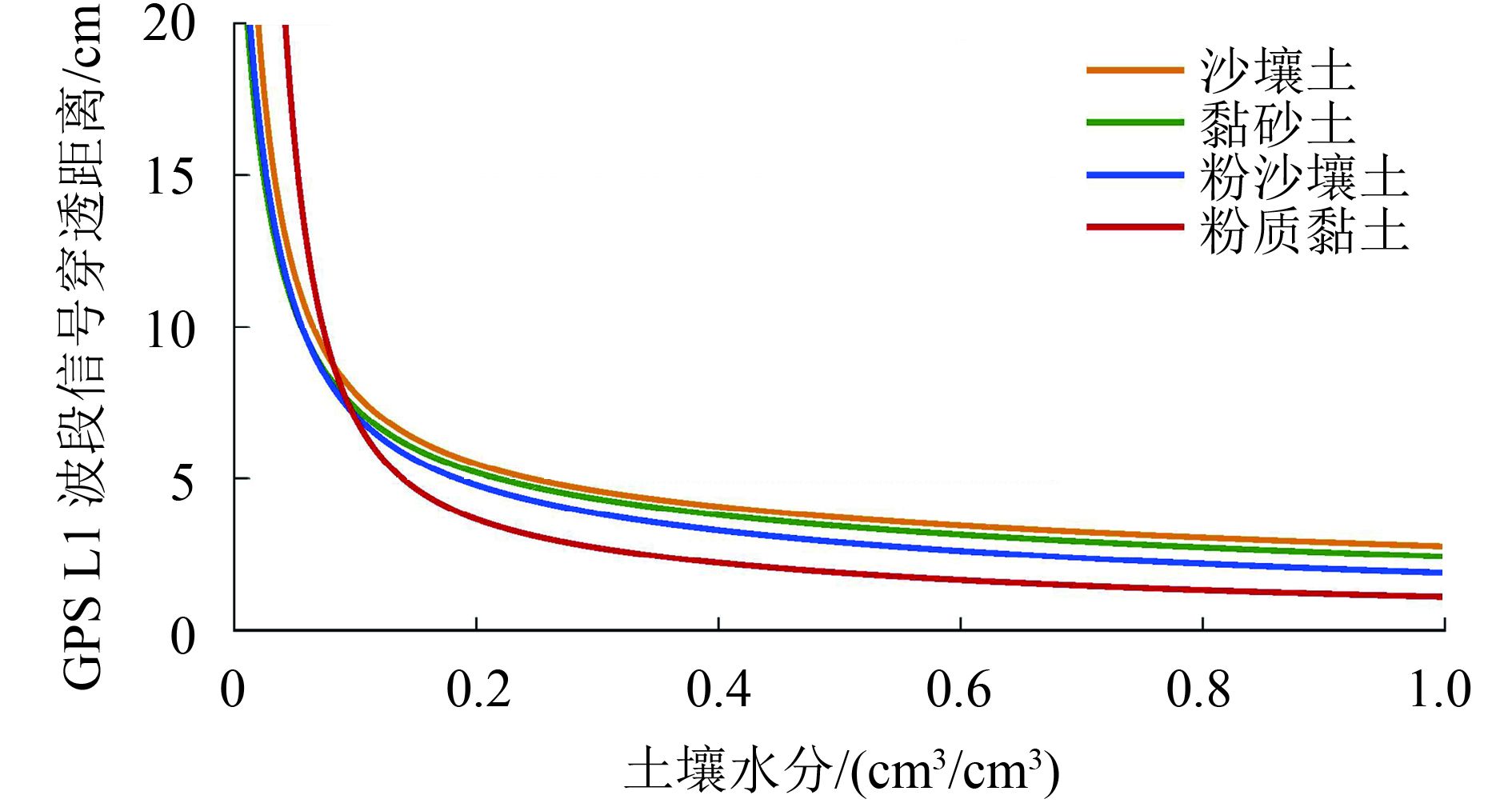
Hallikainen等人(1985)给出当电磁波频率为1.4 GHz时土壤复介电常数实部与虚部的计算公式,以及沙壤土、黏沙土、粉沙壤土与粉质黏土4种典型土壤的成分比例。同样以GPS L1波段为例,可以得到信号在不同类型土壤中穿透距离随土壤水分的变化情况,如图7所示,北斗导航信号同属于L波段,在土壤中的穿透距离差别不大。可见对于所有的土壤类型,穿透距离都随着土壤水分的变大而减小;排除土壤极度干燥的情况,GPS L1波段信号在相对干燥土壤中穿透范围约为5—10 cm,当土壤含水量超过0.2 cm3/cm3时,穿透距离会小于5 cm。利用GNSS-R估算得到土壤水分后,结合信号频率与土壤类型确定信号在土壤中的穿透距离,最后乘以cosθ1得到探测深度,GNSS-R遥感得到的是探测深度范围内土壤水分的平均值。
3 GNSS-R土壤水分遥感适宜性的应用分析
3.1 单天线模式地基观测
美国板块边界观测计划PBO (Plate Boundary Observatory)用于研究美国西部太平洋与北美地壳活跃板块的3维应力场变化,目前有1100个连续运行的GPS站点,科罗拉多大学基于这些GPS站点记录的SNR数据已发布土壤水分产品([2016-06-13] http://xenon.colorado.edu/portal/)。本文以位于科罗拉多州的P041站点(39.9495°N,–105.1943°W)为例,从实际应用角度对单天线模式GNSS-R地基土壤水分遥感适宜性作进一步分析。
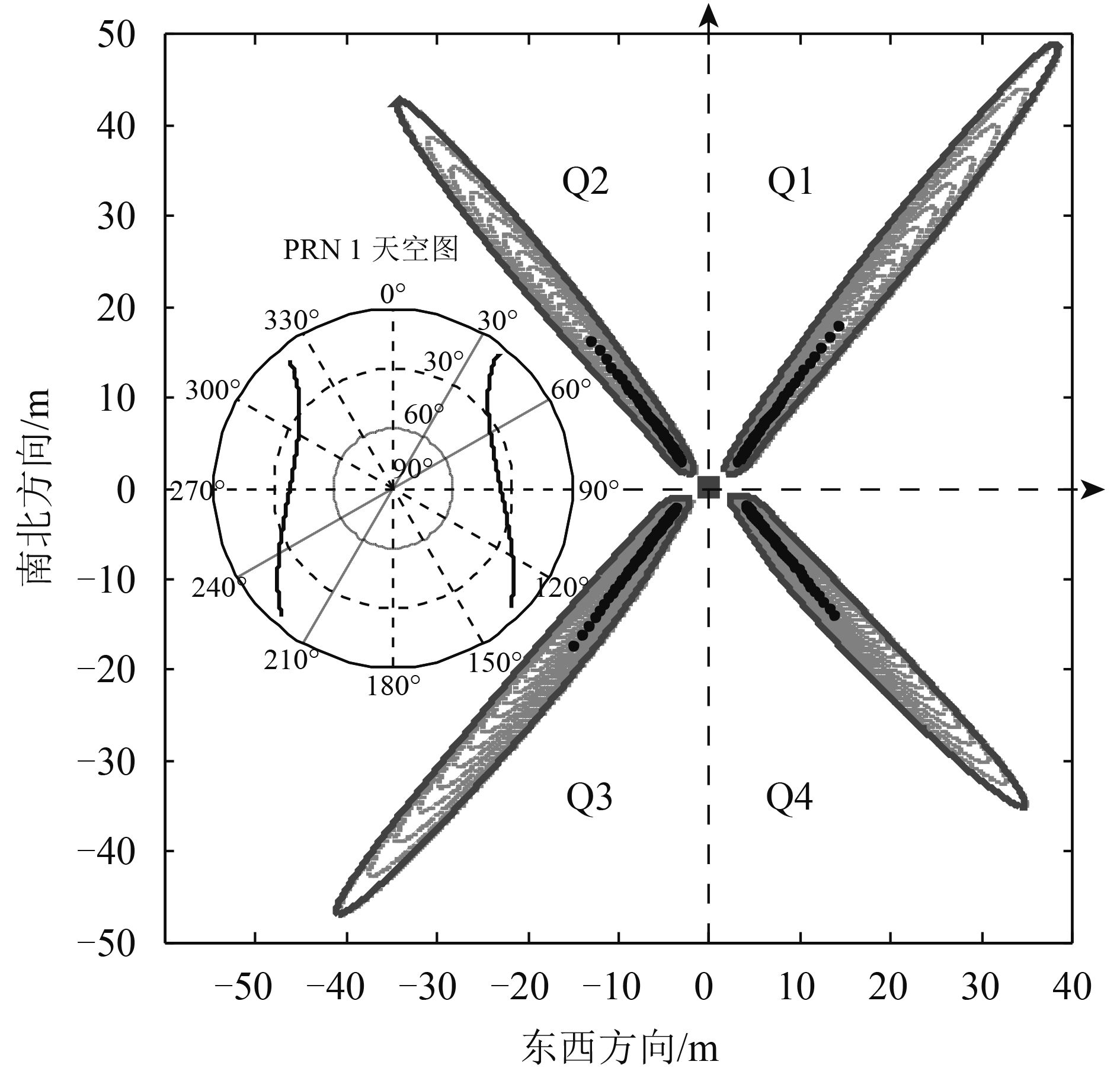
P041天线高度为2 m,选择2012年1月1日PRN 1卫星观测数据,高度角变化范围为5°—25°,数据采样的时间间隔为1分钟。已知天线高度的情况下根据高度角与方位角即可确定镜面反射点位置,再依据式(3)作出对应的第一级“Fresnel反射区”,如图8所示。图8中坐标原点为GPS观测站点位置,子图为当日PRN 1卫星的天空图,共有两个卫星起落,4段高度角符合5°—25°范围的数据,形成的4条镜面反射点轨迹分别分布在4个象限。
由于地基单天线观测模式从直射与反射信号干涉波形中提取地表土壤水分信息(Larson 等,2010),而干涉的形成需要卫星高度角的变化,因此从一幅干涉图样中得到的土壤水分估算值代表了该时间段内第一级“Fresnel反射区”所经过的地表范围内的土壤水分信息。图8中每个椭圆簇所覆盖的面积即为对应土壤水分估算值的空间分辨率,4个象限内椭圆簇面积平均为205 m2,由式(5)知,第一级“Fresnel反射区”面积由微波波长、天线高度与掠射角决定,椭圆簇面积还需考虑卫星高度角范围与方位角的影响。
采用Larson等人(2010)利用5°—25°高度角范围的SNR数据得到的土壤水分值,取GNSS信号仰角为15°,利用PBO土壤水分产品P041站点2012全年日土壤水分数据,由式(10)、(11)可得对应的探测深度,如图9所示,可知当土壤水分在0.2—0.4 cm3/cm3之间时,探测深度约5 cm;当土壤非常干燥时,探测深度能够大于20 cm。Larson等人(2010)利用能够覆盖第一“Fresnel反射区”的铁丝网确定GNSS信号在土壤中的探测深度,得到土壤水分为0.1 cm3/cm3(2.5 cm深度)时L2波段信号的探测深度约5 ± 1 cm,而利用2.3节模型得到相同条件下的探测深度约为7.6—9.2 cm。模型中假设土壤水分均一,而实际情况下土壤水分随深度变化,这应该是产生误差的主要原因,而土壤类型也会导致信号穿透距离的不同。因此,2.3节的模型可用于确定信号探测的相对深度。

3.2 多天线模式空基观测
以2014年5月30日郑州上街空基GNSS-R试验为例,进一步对多天线模式空基观测下的土壤水分遥感适宜性进行分析。试验使用运-12飞机搭载中科院国家空间科学中心研制的GNSS-R载荷进行区域农田土壤水分及黄河水面高度观测。陆地上方飞行高度约500 m,PRN 18,24,21与22 4颗卫星信号在飞行期间掠射角相对较大,其左旋反射信号用于土壤水分估算。按照图3的流程得到镜面反射点的空间位置,结合对应的土壤水分估算值叠加到遥感影像上进行分析,如图10(a)所示,底图为16 m分辨率的高分1号(GF-1) WFV伪彩色合成影像(过境日期为2014年5月26日),不同颜色的镜面反射点表示不同的土壤水分范围,如图例所示。本文侧重于GNSS-R土壤水分遥感的适宜性分析,土壤水分估算精度分析请参阅文献(Wan 等,2015)。

所选4颗卫星信号平均掠射角为58°,由式(5)得此次GNSS-R空基试验的分辨像元平均为420 m2。对观测区域采用反距离权重插值法,得到空间分辨单元为20 m×20 m的土壤水分值,如图10(b)所示。图10中色彩条由红到绿表示土壤水分估算值的增大。研究区域的西北部为黄河,东部存在一水塘,栅格图像中的颜色边界比较准确地勾勒出了水岸交界线,由此可见GNSS-R技术也可用于进行地表覆盖分类。其余空间部分主要呈红色与黄色,与试验前两周没有降水、土壤整体比较干燥的客观状况相关。
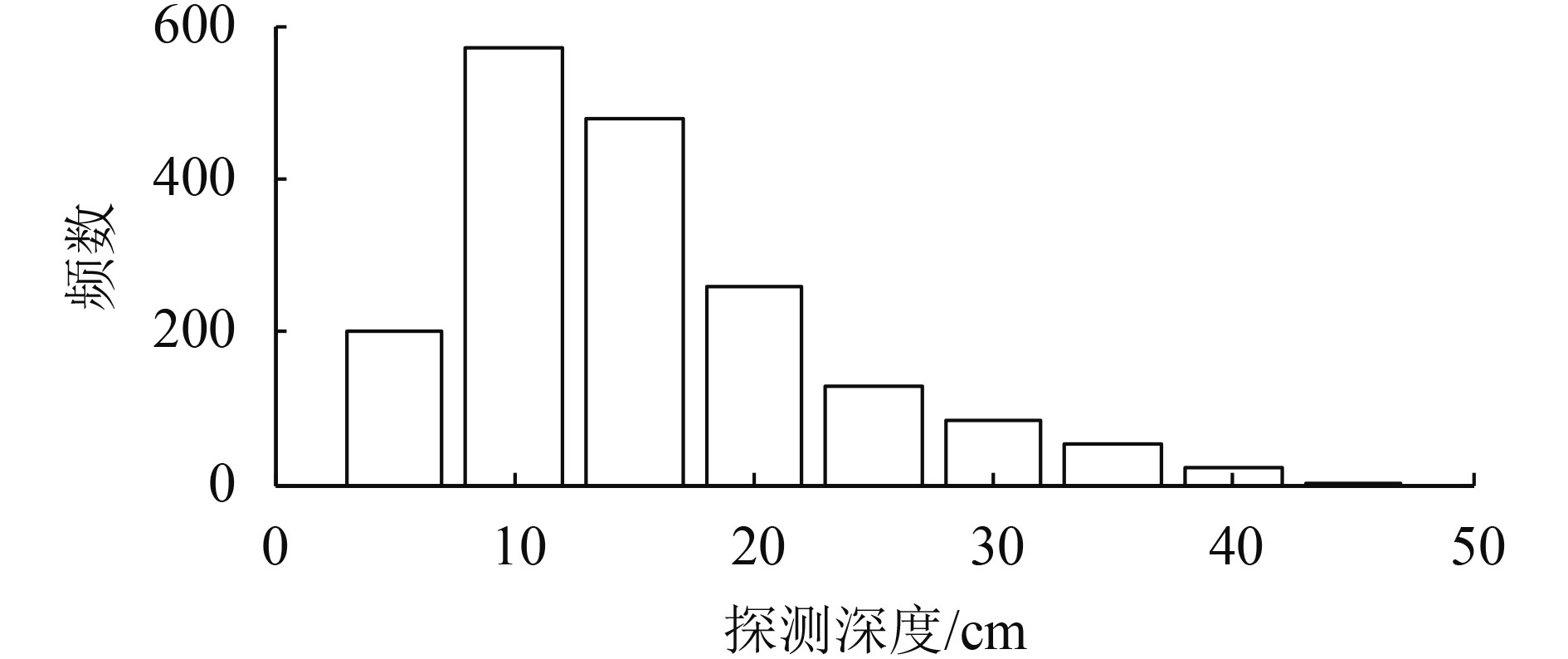
由式(10)与式(11)可得每个土壤水分估算值相应的探测深度,图11为所有采样点探测深度的直方图,可见大部分采样点的探测深度约为10—20 cm。因为研究区域航飞期间土壤整体比较干燥,大部分采样点的土壤水分估算值小于0.1 cm3/cm3,所以GNSS信号穿透土壤较深。该结论可为航空GNSS-R土壤水分精度验证提供参考信息,即在布设土壤水分仪采集实测数据时,可根据空间土壤水分的不均匀分布特点设置不同的实测深度,以便更有针对性的进行GNSS-R土壤水分精度评价。
4 结 论
自利用GNSS反射信号进行地表参数遥感的概念提出后,GNSS-R技术逐渐由海面扩展到陆面遥感应用。作为陆面遥感的重要分支,GNSS-R土壤水分遥感已经形成单天线与多天线两种观测模式与研究方法体系,目前国际上已经和正在发射多颗搭载GNSS-R设备的低轨卫星在轨观测计划。为提高GNSS-R土壤水分遥感的技术成熟度并推动业务化应用,必须进行土壤水分估算精度评价,而开展适宜性分析,确定镜面反射点的地理位置、空间分辨率与土壤探测深度是开展精度评价的前提。
本文给出了一种迭代的方法确定镜面反射点位置,并分析了大地水准面与地形高度对镜面反射点位置的影响;在对GNSS反射信号等延迟环几何特性讨论的基础上,定义了GNSS-R遥感分辨率的概念,并给出了数学表达公式;借鉴微波遥感的相关理论,给出GNSS信号在土壤中的穿透距离计算公式,并区分了探测深度与穿透距离两个概念。以上GNSS-R土壤水分遥感的适宜性分析能够为GNSS-R土壤水分遥感精度评价提供切实可行的操作基础。另外在地表参数遥感方面,北斗卫星信号与GPS相比主要是波段频率的不同,因此以上分析同样适用于北斗反射信号遥感应用。
本文分别以单天线模式地基观测与多天线模式空基观测为例,进行了GNSS-R土壤水分遥感的实际应用分析。对于单天线模式,对国际上已发布的PBO土壤水分产品进行深入分析,给出了镜面反射点的相对位置及反射GPS信号的地表范围与面积,并对时间序列土壤水分代表的探测深度给出定量估计,为产品使用与精度评价提供精细化参考,也为中国北斗反射信号遥感的单天线模式应用提供定量化参照;对于多天线模式,未来的发展趋势必将是从空基预研走向星载观测,本文根据中国开展的空基预研试验对GNSS-R土壤水分的空间分布、空间分辨率、探测深度进行定量化描述,为未来星载观测中卫星轨道与载荷设计、以及土壤水分估算模型与产品生产等提供参考。
参考文献(References)
-
Alonso-Arroyo A, Forte G, Camps A, Park H, Pascual D, Onrubia R and Jove-Casulleras R. 2013. Soil Moisture mapping using forward scattered GPS L1 signals // Proceedings of 2013 IEEE International Geoscience and Remote Sensing Symposium. Melbourne, VIC: IEEE: 354–357
-
Alonso-Arroyo A, Camps A, Monerris A, Rüdiger C, Walker J P, Forte G, Pascual D, Park H and Onrubia R. 2014. The light airborne reflectometer for GNSS-R observations (LARGO) instrument: initial results from airborne and Rover field campaigns // Proceedings of 2014 IEEE International Geoscience and Remote Sensing Symposium. Quebec City, QC: IEEE: 4054–4057
-
Alonso-Arroyo A, Torrecilla S, Querol J, Camps A, Pascual D, Park H and Onrubia R. 2015. Two dedicated soil moisture experiments using the scatterometric properties of GNSS-reflectometry // Proceedings of 2015 IEEE International Geoscience and Remote Sensing Symposium. Milan: IEEE: 3921–3924
-
Ao M S, Zhu J J, Hu Y J, Zeng Y and Liu Y D. 2015. Comparative experiments on soil moisture monitoring with GPS SNR observations. Geomatics and Information Science of Wuhan University, 40 (1): 117–120, 127. [DOI: 10.13203/j.whugis20130170] ( 敖敏思, 朱建军, 胡友健, 曾云, 刘亚东. 2015. 利用SNR观测值进行GPS土壤湿度监测. 武汉大学学报(信息科学版), 40 (1): 117–120, 127. [DOI: 10.13203/j.whugis20130170] )
-
Chew C, Shah R, Zuffada C, Hajj G, Masters D and Mannucci A J. 2016. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophysical Research Letters, 43 (7): 3317–3324. [DOI: 10.1002/2016GL068189]
-
Egido A, Caparrini M, Ruffini G, Paloscia S, Santi E, Guerriero L, Pierdicca N and Floury N. 2012. Global navigation satellite systems reflectometry as a remote sensing tool for agriculture. Remote Sensing, 4 (8): 2356–2372. [DOI: 10.3390/rs4082356]
-
Egido A, Paloscia S, Motte E, Guerriero L, Pierdicca N, Caparrini M, Santi E, Fontanelli G and Floury N. 2014. Airborne GNSS-R polarimetric measurements for soil moisture and above-ground biomass estimation. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 7 (5): 1522–1532. [DOI: 10.1109/JSTARS.2014.2322854]
-
Garrison J L, Cardellach E, Gleason S and Katzberg S. 2014. Foreword to special issue on reflectometry using global navigation satellite systems and other signals of opportunity (GNSS+R). IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 7 (5): 1412–1415. [DOI: 10.1109/JSTARS.2014.2325996]
-
Gleason S. 2006. Detecting bistatically reflected GPS signals from low earth orbit over land surfaces // Proceedings of 2006 IEEE International Symposium on Geoscience and Remote Sensing. Denver, CO, USA: IEEE: 3069–3072 [DOI: 10.1109/IGARSS.2006.792]
-
Guan Z, Zhao K and Song D S. 2006. Measuring soil moisture using reflected GPS signals. Advances in Earth Science, 21 (7): 747–750. [DOI: 10.11867/j.issn.1001-8166.2006.07.0747] ( 关止, 赵凯, 宋冬生. 2006. 利用反射GPS信号遥感土壤湿度. 地球科学进展, 21 (7): 747–750. [DOI: 10.11867/j.issn.1001-8166.2006.07.0747] )
-
Hallikainen M T, Ulaby F T, Dobson M C, EL-Rayes M A and Wu L K. 1985. Microwave dielectric behavior of wet soil-part 1: empirical models and experimental observations. IEEE Transactions on Geoscience and Remote Sensing, GE-23 (1): 25–34. [DOI: 10.1109/TGRS.1985.289497]
-
Jales P and Unwin M. 2015. Mission Description-GNSS Reflectometry on TDS-1 with the SGR-ReSI. Guildford, UK: Surrey Satellite Technology Ltd
-
Jin S G, Feng G P and Gleason S. 2011. Remote sensing using GNSS signals: current status and future directions. Advances in Space Research, 47 (10): 1645–1653. [DOI: 10.1016/j.asr.2011.01.036]
-
Jin S G and Komjathy A. 2010. GNSS reflectometry and remote sensing: new objectives and results. Advances in Space Research, 46 (2): 111–117. [DOI: 10.1016/j.asr.2010.01.014]
-
Kaplan E and Hegarty C. 2005. Understanding GPS: Principles and Applications. 2nd ed. Norwood: Artech House: 32–34
-
Katzberg S J and Garrison J L. 1996. Utilizing GPS to Determine Ionospheric Delay over the Ocean. [s.l.]: National Aeronautics and Space Administration Langley Research Center: 1–16
-
Katzberg S J, Torres O, Grant M S and Masters D. 2006. Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant: results from SMEX02. Remote Sensing of Environment, 100 (1): 17–28. [DOI: 10.1016/j.rse.2005.09.015]
-
Larson K M, Braun J J, Small E E, Zavorotny V U, Gutmann E D and Bilich A L. 2010. GPS multipath and its relation to near-surface soil moisture content. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 3 (1): 91–99. [DOI: 10.1109/JSTARS.2009.2033612]
-
Li H, Xia Q, Yin C and Wan W. 2013. The current status of research on GNSS-R remote sensing technology in China and future development. Journal of Radars, 2 (4): 389–399. [DOI: 10.3724/SP.J.1300.2013.13080] ( 李黄, 夏青, 尹聪, 万玮. 2013. 我国GNSS-R遥感技术的研究现状与未来发展趋势. 雷达学报, 2 (4): 389–399. [DOI: 10.3724/SP.J.1300.2013.13080] )
-
Liu J N, Shao L J and Zhang X X. 2007. Advances in GNSS-R studies and key technologies. Geomatics and Information Science of Wuhan University, 32 (11): 955–960. [DOI: 10.3969/j.issn.1671-8860.2007.11.004] ( 刘经南, 邵连军, 张训械. 2007. GNSS-R研究进展及其关键技术. 武汉大学学报(信息科学版), 32 (11): 955–960. [DOI: 10.3969/j.issn.1671-8860.2007.11.004] )
-
Mao K B, Wang J M, Zhang M Y, Tang H J and Zhou Q B. 2009. The study of soil moisture retrieval from GNSS-R signals based on AIEM model and experiment data. Chinese High Technology Letters, 19 (3): 295–301. [DOI: 10.3772/j.issn.1002-0470.2009.03.015] ( 毛克彪, 王建明, 张孟阳, 唐华俊, 周清波. 2009. 基于AIEM和实地观测数据对GNSS-R反演土壤水分的研究. 高技术通讯, 19 (3): 295–301. [DOI: 10.3772/j.issn.1002-0470.2009.03.015] )
-
Martín-Neira M, D’Addio S, Buck C, Floury N and Prieto-Cerdeira R. 2011. The PARIS ocean altimeter in-orbit demonstrator. IEEE Transactions on Geoscience and Remote Sensing, 49 (6): 2209–2237. [DOI: 10.1109/TGRS.2010.2092431]
-
Masters D, Axelrad P and Katzberg S. 2004. Initial results of land-reflected GPS bistatic radar measurements in SMEX02. Remote Sensing of Environment, 92 (4): 507–520. [DOI: 10.1016/j.rse.2004.05.016]
-
Rodriguez-Alvarez N, Bosch-Lluis X, Camps A, Vall-Llossera M, Valencia E, Marchan-Hernandez J F and Ramos-Perez I. 2009. Soil moisture retrieval using GNSS-R techniques: experimental results over a bare soil field. IEEE Transactions on Geoscience and Remote Sensing, 47 (11): 3616–3624. [DOI: 10.1109/TGRS.2009.2030672]
-
Song X Z, Xu A G, Yang D K and Ma X D. 2013. Details of soil moisture measuring utilizing GNSS reflected signals. Bulletin of Surveying and Mapping (11): 61–64. ( 宋学忠, 徐爱功, 杨东凯, 马小东. 2013. GNSS反射信号在土壤湿度测量中的应用. 测绘通报 (11): 61–64. )
-
Torres O. 2004. Analysis of Reflected Global Positioning System Signals as a Method for the Determination of Soil Moisture. El Paso: University of Texas at El Paso: 6–33
-
Troglia Gamba M, Marucco G, Pini M, Ugazio S, Falletti E and Lo Presti L. 2015. Prototyping a GNSS-based passive radar for uavs: an instrument to classify the water content feature of lands. Sensors, 15 (11): 28287–28313. [DOI: 10.3390/s151128287]
-
Ulaby F T, Moore R K and Fung A K. 1981. Microwave Remote Sensing: Active and Passive, Volume 1: Microwave Remote Sensing Fundamentals and Radiometry. Norwood: Artech House: 40–60
-
Ulaby F T, Moore R K and Fung A K. 1986a. Microwave Remote Sensing: Active and Passive, Volume II: Radar Remote Sensing and Surface Scattering and Emission Theory. Norwood: Artech House: 844–847
-
Ulaby F T, Moore R K and Fung A K. 1986b. Microwave Remote Sensing: Active and Passive Volume III: From Theory to Applications. Norwood: Artech House: 1523–1524
-
Wan W, Bai W H, Zhao L M, Long D, Sun Y Q, Meng X G, Chen H, Cui X and Hong Y. 2015. Initial results of China’s GNSS-R airborne campaign: soil moisture retrievals. Science Bulletin, 60 (10): 964–971. [DOI: 10.1007/s11434-015-0789-9]
-
Wan W, Li H, Hong Y, Chen X W and Peng X F. 2015. Toward the patterns of GNSS-R observations: definition and application. Journal of Remote Sensing, 19 (6): 882–893. [DOI: 10.11834/jrs.20154304] ( 万玮, 李黄, 洪阳, 陈秀万, 彭学峰. 2015. GNSS-R遥感观测模式及陆面应用. 遥感学报, 19 (6): 882–893. [DOI: 10.11834/jrs.20154304] )
-
Wickert J, Andersen O B, Beyerle G, Chapron B, Cardellach E, D’Addio S, Foerste C, Gommenginger C, Gruber T, Helm A, Hess M, Hoeg P, Jaeggi A, Jakowski N, Kern M, Lee T, Martin-Neira M, Montenbruck O, Pierdicca N, Rius A, Rothacher M, Shum C and Zuffada C. 2013. GEROS-ISS: innovative GNSS reflectometry/ occultation payload onboard the International Space Station for the Global Geodetic Observing System //Proceedings of 2013 AGU Fall Meeting Abstracts. [s.l.]: AGU: 0871
-
Yan S H, Gong J Y, Zhang X X and Li D X. 2011. Ground based GNSS-R observations for soil moisture. Chinese Journal of Geophysics, 54 (11): 2735–2744. [DOI: 10.3969/j.issn.0001-5733.2011.11.003] ( 严颂华, 龚健雅, 张训械, 李冻秀. 2011. GNSS-R测量地表土壤湿度的地基实验. 地球物理学报, 54 (11): 2735–2744. [DOI: 10.3969/j.issn.0001-5733.2011.11.003] )
-
Yang L, Wu Q L, Zhang B, Liang Y, Hong X B and Zou W B. 2016. SVRM-assisted soil moisture retrieval method using reflected signal from BeiDou GEO satellites. Journal of Beijing University of Aeronautics and Astronautics, 42 (6): 1134–1141. [DOI: 10.13700/j.bh.1001-5965.2015.0656] ( 杨磊, 吴秋兰, 张波, 梁勇, 洪学宝, 邹文博. 2016. SVRM辅助的北斗GEO卫星反射信号土壤湿度反演方法. 北京航空航天大学学报, 42 (6): 1134–1141. [DOI: 10.13700/j.bh.1001-5965.2015.0656] )
-
Zhang X J, Zhang W J, Lu X R, Kang G J and Fang G Y. 2007. Dual-frequency synthetic aperture radar for deep soil moisture estimation. Journal of Electronics & Information Technology, 29 (11): 2711–2714. [DOI: 10.3724/SP.J.1146.2006.00391] ( 张晓娟, 张文吉, 路晓荣, 康高健, 方广有. 2007. 双频多极化SAR测量深层土壤湿度. 电子与信息学报, 29 (11): 2711–2714. [DOI: 10.3724/SP.J.1146.2006.00391] )


