

|
收稿日期: 2016-01-08; 修改日期: 2016-09-17; 优先数字出版日期: 2017-01-25
基金项目: 国家自然科学基金(编号:41101396,41001262)
第一作者简介: 丁磊(1991-), 男, 博士研究生, 研究方向为遥感影像解译。E-mail:dinglei14@outlook.com
通讯作者简介: 张保明(1961-), 男, 教授, 研究方向为数字摄影测量及遥感数据应用。E-mail:zbm1960@163.com
中图分类号: TP751
文献标识码: A
文章编号: 1007-4619(2017)01-0084-12
|
摘要
高分辨率遥感影像上细节信息繁杂、干扰物普遍存在,对其进行自动化道路识别与提取的相关研究仍处在探索阶段。在道路提取过程中引入矢量数据辅助,可解决初始信息获取的困难,得到可靠性较强的训练样本。为此,提出一种矢量数据辅助下的道路提取方法,能够筛选出矢量数据中包含的有效信息,引导实现对高分辨率遥感影像的道路自动提取。利用Mean-shift滤波对图像进行预处理后,首先从矢量数据获取候选种子点,并通过提炼同质区域的形状特征剔除错误候选点;然后,自动获取负样本点以进行朴素贝叶斯分类,并采用邻域质心投票算法从分类影像提取道路中心线;最后,结合像素跟踪与方向判断矢量化道路中心线,并提出一种基于矢量几何分析的断线连接与毛刺剔除方法,对提取结果进行信息修复与规整、优化。实验结果显示,该算法的提取质量达到80%以上,且具备较强的稳健性,能够适应具有不同道路辐射和分布特征的高分辨率遥感影像。
关键词
道路提取 , 矢量数据 , 朴素贝叶斯分类 , 邻域质心投票 , 矢量化 , 断线连接
Abstract
Considering the existence of both detailed information and interfering objects, research on recognition and extraction of roads from high-resolution remote sensing images remains in the exploration phase. The assistance of vector data during road extraction solves the difficulty of obtaining initial information. Thus, reliable training data can be selected. Therefore, a road extraction method that is supported by vector data is proposed, which effectively provides information that is included in the vector data and extract roads automatically from high-resolution remote sensing images. After the use of the mean shift filter to preprocess images, candidate seed points are acquired from vector data, among which false candidate points are later excluded via shape features of homogeneous areas. Then, negative sample points are selected for the conduct of Bayesian classification. After which, Neighborhood Centroid Voting is adopted to extract road centerlines from classified images. Finally, road centerlines are transformed into vector data by using a method that combines pixel tracking and direction estimation, and a segment linking and burr removing method is proposed based on geometric analysis of vectors. Experiments are conducted on a collection of high-resolution images in which roads have diverse types and distribution features. For an ideal case with clear and continuous roads, the extraction quality is up to 97.35%. For images with occlusions and interferences, the extraction quality stays above 80%, thereby indicating the effectiveness and robustness of the proposed method. A road extraction method that is supported by vector data has been proposed in this study. This method uses the information concluded based on vector data to guide the road extraction process, thus free of manual operation. Experimental results suggest that this method can automatically extract roads from high-resolution remote sensing images with accuracy and robustness, thereby being able to adapt to roads with diverse radiation and distribution features.
Key words
road extraction , vector data , naïve Bayesian classification , Neighborhood Centroid Voting , vectorization , segment linking
1 引言
道路作为一种重要的地物目标,其自动化识别、定位与提取是摄影测量与遥感领域的一项研究热点与难点。地理信息系统(GIS)数据、地形图数据等经过人工采集与编辑的矢量地理数据,具有精度高、可靠性强等特点,但由于需要投入较多的人力劳动,在时态上往往落后于遥感影像,一些发生变化的地物信息未得到及时更新。利用矢量数据对道路提取加以辅助,可以获取一定的初始信息,替代或部分替代人工干预,获得相对稳定的提取结果。此外,该方向与GIS更新及变化检测等研究联系紧密,具备较强的应用价值,已吸引了一批学者开展相关研究。
Mailard和Cavayas (1989)首先提出了地图匹配法用来更新数据库,首先对影像和地图进行匹配,提取在影像和地图中都存在的道路,然后基于新、旧道路相互连接的假设,根据提取的旧道路寻找新道路(叶发茂 等,2006)。Kumagai等人(2001)对影像和地图进行匹配后从已匹配的道路中提取有关道路红和近红外波段的统计信息,建立道路样本,利用直方图匹配方法提取道路。Mena和Malpica (2005)提出了一种在农村或半城区高分辨率卫星图像中自动提取道路信息的方法,利用已有的矢量信息对GIS数据进行更新(李光耀和胡阳,2008)。Guo等人(2004, 2007)利用USGS数字线划图(DLG),将遥感影像上道路提取的处理范围缩小到DLG中的线周围,并通过分割方法获取道路区域。吴晓燕等人(2010)在已有矢量数据周围构造缓冲区进行候选点检测,并通过直线跟踪和感知编组方法获取道路网,但对新增道路的提取需要加以人工干预。张剑清等人(2010)通过道路矢量信息获取初始点,并利用Mean-shift算法迭代收敛到道路中心点,实现了小比例尺航空影像上道路的自动提取。王双(2014)利用GIS数据构造的B样条曲线作为道路的初始中心线,并采用改进的分级演化方法使模型收敛到正确的位置,得到道路的两条边线。董明等人(2009)同样利用缓冲区方法减少道路搜索区域,并利用多尺度模板匹配法检测道路,并利用LSB-Snake方法半自动检测新增道路。刘朋飞在矢量道路附近通过二值模板匹配获取初始点,结合水平集方法迭代至道路轮廓(刘朋飞,2010)。总结来看,这些方法有的在原有矢量数据对应的图像附近进行跟踪或检测,因而对于新增或变化剧烈的道路进行提取时存在局限,或需引入人工干预;有的通过矢量数据选取样本来提取道路,但需假定矢量数据对应的道路信息正确,缺乏对信息的验证过程,无法证实其在矢量数据含有错误信息时的有效性。
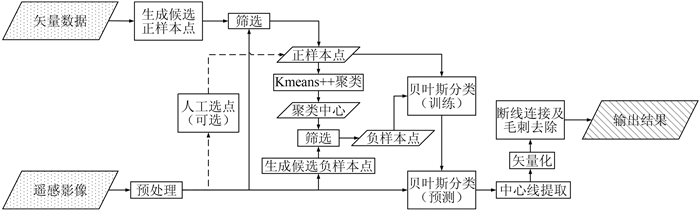
针对上述问题,本文提出一种矢量数据辅助下自动对高分辨率遥感影像进行道路提取的方法。利用Mean-shift滤波对图像进行预处理后,首先由矢量数据节点计算出一批候选种子点的位置,并对图像上候选点处的邻域形状进行分析,筛选出满足要求的种子点,接着通过KMeans++聚类得到两或三种道路点辐射信息的聚类中心;随后,等距采集并筛选出足量负样本点进行朴素贝叶斯分类,得到二值化的分类结果;最后,采用邻域质心投票法对分类影像上的道路进行提取,并进行矢量化及基于矢量分析的断线连接与毛刺剔除,得到道路提取结果。对于遮挡现象不严重的影像,本文算法在保证效率的前提下能实现较为稳定的提取质量,对于停车场、空地等团块状的干扰物有一定的排除效果,且在缺乏用于辅助的矢量数据时亦可通过人工选点代替(人工干预较少,仅需选取少量样本点),具备较强的实用性。
2 原理与方法
本文方法的基本原理是从矢量道路数据中获取位置信息,据此采取一定方法在遥感图像上得到可信的训练样区并进行监督分类,对二值化的分类结果利用邻域质心投票算法提取道路中心线,并通过矢量分析方法进行断线连接等规整操作。
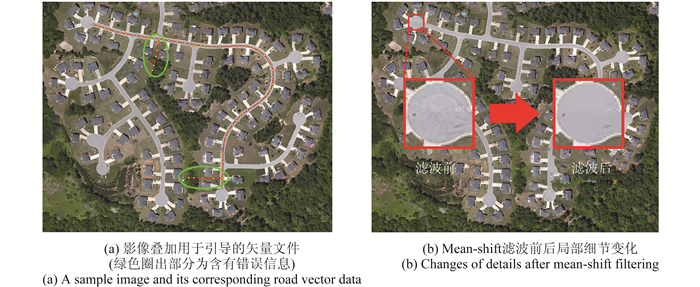
为阐释本文算法的具体原理,选用人工采集的矢量文件作为引导,对一幅道路特征较为明显的街区影像(美国亚特兰大局部航空影像,分辨率为0.3 m,大小861×700像素)加以处理。矢量叠加影像后如图 1(a)所示,可看到该矢量文件仅覆盖一条主要街道,且含有错误信息(绿色圈出)。

2.1 影像预处理
高分辨率遥感图像上含有丰富的细节信息,直接对影像处理会造成后续的监督分类结果过于破碎,不利于提取结果的完整性。为此,首先对图像进行Mean-shift滤波处理,合并一些相似的光谱特征。
Mean-shift计算模型是特征空间分析的有效工具,在计算机视觉领域应用广泛(王潇晨 等,2009)。利用Mean-shift计算模型对图像进行自适应滤波,能够通过其统计迭代的聚类特性,有效抑制图像噪声,同时不损失目标信息(冀峰 等,2012)。采用Mean-shift滤波对图像进行处理时,需设置坐标空间半径
2.2 获取并筛选正样本点
利用旧时态矢量数据对道路提取过程进行引导时,需认识到矢量数据中含有一些已发生变化、与实际有出入的信息。如何排除这部分信息的干扰,与此同时最大限度发挥有效信息的引导作用,是本文研究面临的一大难点。本文通过对判断同质区域的形状来验证位置信息的有效性,能够获取可靠且足量的样本点,为提取过程提供可靠引导。
矢量数据中,道路通常以节点与连接线的形式进行数据组织和表达,节点对应道路的始末端点及中间出现的转折点,连接线则对应着实际道路中的某个路段。一条完整的道路往往由若干连续的节点与连接线表示。由于此步骤的目的在于为监督分类挑选出可信的正样本点,无需顾及样本点的覆盖完整性或整体分布,因此着重考虑从易验证形状特征的位置获取候选样本点。考虑到道路段的端点或转折处易出现弯曲或复杂的形状,而节点中间的部分往往呈现为特征明显的长方形,故选择在每两个节点的中点处获取候选样本点。
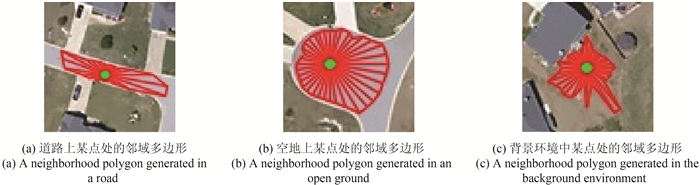
为排除无效信息,剔除错误的候选样本点,本文从候选样本点周围同质区域的形状入手进行考察。首先,由每个候选样本点出发,朝其邻域各个方向投出射线,每条射线在遇到与候选点色差大于
| $ D({x_i},{x_j}) = {({r_i} - {r_j})^2} + {({g_i} - {g_j})^2} + {({b_i} - {b_j})^2} $ | (1) |
之后,顺次连接各条射线停止扩张时的像素位置,可得到一个多边形,该多边形反映了候选点周边同质区域的形状,称其为候选点处的邻域多边形。设置
为衡量邻域多边形与长条状矩形的接近程度,采用以下指标:
(1) 连通距离较长的方向数目。称候选点
| $ \hat W = \frac{{2\sum\limits_{i = 1}^n {Mi{n_i}[Dis(\alpha ,p)]} }}{n} $ | (2) |
式中,
计算得到
| $ \hat L = {k_1} \cdot \hat W\;\;\;\;{k_1} \in (2,4) $ | (3) |
| $ K(p) = \left\{ {\begin{array}{*{20}{c}} {{k_2} \cdot \frac{{\hat L}}{2}\;\;\;\;\;\;{k_2} \in (0,1),\;\;\hat L \leqslant 2{W_{{\rm{limit}}}}}\\ {{k_2} \cdot {W_{{\rm{limit}}}}\;\;\;\;{k_2} \in (0,1),\;\;\hat L > 2{W_{{\rm{limit}}}}} \end{array}} \right. $ | (4) |
式中,
最后,记录所有连通距离大于
(2) 长宽比指数。长宽比指数是常用的线性特征指标(Miao 等,2013),定义为
| $ R = \frac{{{L_{{\rm{MER}}}}}}{{{W_{{\rm{MER}}}}}} $ | (5) |
式中,
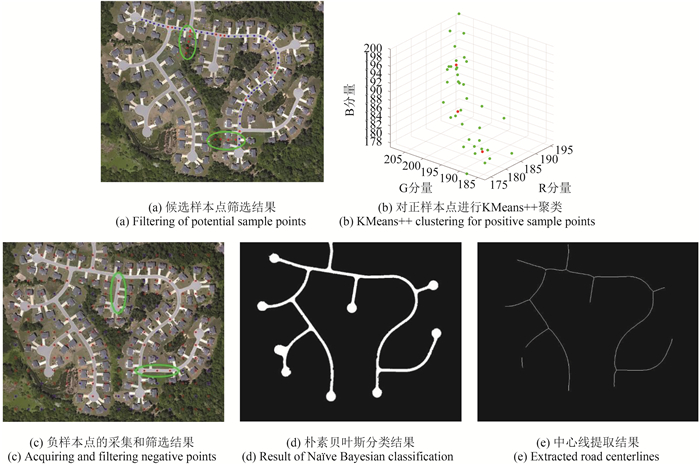
对图 1(a)中通过矢量数据获取的候选样本点逐个计算这两项指标,并设定阈值条件2 <
通过上述指标可对样本点周围同质区域的形状特征进行判别。须注意,真实情况下的地物相对旧时态的矢量数据可能发生部分变化,因此筛选得到的满足形状特征的样本点虽然大多数是道路点,但仍可能有少数点处在成排的建筑物、堤坝及其他形状狭长的区域。
2.3 获取并筛选负样本点
在进行监督分类前,需采集足量负样本用于训练。采集方法为等距采集,即每相隔一定像素数目(由图像分辨率及图像大小确定)进行取样。为确保负样本点不落在可能为道路的区域,同样采用前述的形状指标对候选负样本点进行筛选(限定
此时仅考虑了区域的形状特征,候选负样本点中可能有一部分落在空地及停车场等光谱信息与道路相似的区域,对分类过程造成不利影响。为避免这种情况,参考已获取的正样本点的光谱信息继续进行筛选。同时,为了排除正样本点中可能出现的零星错误样本(如2.2节所述)带来的干扰,利用改进的K均值算法(KMeans++)对正样本点进行无监督分类,获取几个典型的分类中心。
KMeans是著名的划分聚类算法,可把给定的数据划分为
然后,计算每个负样本点在颜色空间中与各个聚类中心的距离;若与任意聚类中心的色差小于
2.4 朴素贝叶斯分类
朴素贝叶斯分类是一种简单、有效的分类器,因其计算效率高、精确性及稳定性强等特点而得到了广泛应用。贝叶斯分类器的分类原理是通过某对象的先验概率,利用贝叶斯公式计算出其后验概率,即该对象属于某一类的概率,选择具有最大后验概率的类作为该对象所属的类(段晶,2011)。朴素贝叶斯分类器假设特征对于给定类的影响独立于其他特征,即条件独立性假设。在实际应用中,这一假设不仅以指数级的降低了朴素贝叶斯模型构建的复杂度,而且在许多领域违背这种假设的条件下,朴素贝叶斯也表现出相当的健壮性和高效性(王国才,2010)。
本文选取像素颜色在RGB通道的各个分量作为特征进行监督分类,各特征变量间的独立性较好,且分类情境较为简单。实验中发现采用支持向量机(SVM)等分类器模型对图像进行处理时容易出现过拟合,分类结果往往随着个别样本的选取不同发生较大变化,而朴素贝叶斯分类器则表现出较好的稳定性。利用前述步骤得到的正负样本对图 1(a)中实验图像进行朴素贝叶斯分类,并加以形态学处理(开运算及小区域去除),结果如图 3(d)所示。
2.6 像素跟踪与方向判断相结合的道路矢量化
经过前述步骤,虽然获取了二值化后的道路中心线,但该结果以栅格形式保存,无法直接应用于生产与研究。为此,提出一种像素跟踪与方向判断相结合的方法,对提取结果进行矢量化,其基本过程如下:
(1) 遍历非零像素点,将所有8邻域内非零像素数目为1的点判别为端点,并建立堆栈存储这些端点。
(2) 对堆栈内的端点,通过扫描8邻域内非零像素的方法开始跟踪。在跟踪过程中:第一,建立堆栈存储当前跟踪道路的节点,并将端点加入第一个节点;第二,记录跟踪的主方向,若下一像素出现的方向与主方向的角度差异大于某一阈值,将当前点加入节点堆栈;第三,在当前像素判断完成后将其值赋0,避免重复运算;第四,若遇邻域内非零像素数目大于1,表明遇到交叉点,选择角度与跟踪的主方向最为接近的像素为下一个跟踪像素。若非零像素数目为2,将当前像素坐标加入端点堆栈;第五,若遇邻域内非零像素为0,结束跟踪。此时若存储的节点数目大于1,依次存储所有节点的坐标,完成一条道路的跟踪。
(3) 完成所有端点的跟踪,对结果进行一些规整操作:第一,简化所有道路,删减道路内累计的方向变化不显著的节点;第二,剔除长度过短的道路。
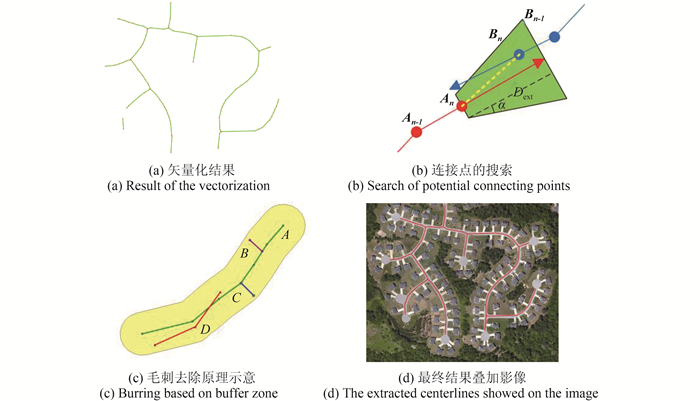
利用该矢量化方法,对图 3(e)的中心线提取结果进行矢量化,结果如图 4(a)所示。
2.7 基于矢量几何分析的断线连接及毛刺去除
由于车辆、树木、阴影等遮挡物的存在以及同谱异物现象的干扰,加之中心线提取算法存在的某些局限(交叉路口的连续性有缺陷等),前述步骤提取出的道路难免存在中断、毛刺等问题。为了对提取结果进一步规整和优化,需进行断线连接及毛刺去除等处理。断线连接的常用方法如张量投票等(Miao 等,2013)直接对栅格数据进行操作,虽然对一部分中断道路和交叉口具备处理能力,但存在一定盲目性,连接效果并不稳定,图像上存在大量短枝和毛刺时连接错误率较高。毛刺去除时常用的形态学方法,在剔除短枝的同时也削减了道路的长度。本文提出一种基于矢量几何分析的方法来实现上述功能,通过计算每个道路端点的延伸方向连接中断道路,并通过缓冲区分析的方法剔除冗余的道路片段如毛刺和短枝,其操作的有效性和正确率优于传统算法。其方法如下:
(1) 扫描所有道路的所有节点,在方向变化较大的节点处将道路拆分为两段,得到许多方向变化较小的道路,并将拆分结束后得到的所有道路按长度递减排序。
(2) 在每条道路的两端计算出一个延伸距离。设道路
| $ \begin{aligned} \!\!\!\! \displaystyle {D_{\rm ext}} \!= & (...(({d_1} {\rm{\cdot}}0.8\cos {\alpha _1} \!+\! {d_2}){\rm{\cdot}}0.8\cos {\alpha _2} \!+\! {d_3})... \!+\! {d_{n{\rm{ - 1}}}}){\rm{\cdot}}\\ & 0.8\cos {\alpha _{n - 1}} + {d_n} \end{aligned} $ | (6) |
式中,
(3) 在每个端点处搜索连接点。对于端点
(4) 重复步骤(2)(3),直到(3)中没有道路被合并。
(5) 进行毛刺及短枝去除,方法为:去除所有长度小于某一阈值的道路;以每条道路为中心建立一个宽度为5个像素单位的缓冲区;遍历其余所有道路,若有道路被缓冲区包含,将该道路删除。如图 4(c),对道路
(6) 连接所有端点坐标相同的道路,以抵消步骤(1)中拆分道路所造成的影响,得到完整道路。
对图 4(a)中矢量数据进行优化处理,生成的矢量道路叠加原始影像如图 4(d)所示,可看到图中两处中断的道路被连接。毛刺剔除的效果见第3节中实验。
考虑到实际生产应用中,获取用于辅助的矢量数据有时存在困难,本文设计的提取流程保留了一定灵活性,可将正样本点的获取方式替代为人工选点,调整成为一种半自动的提取方法。其整体流程如图 5。
3 实验
在Windows 7下使用Visual C++实现了本文方法,并对两幅高分辨率彩色影像进行实验,所选地区的道路分布和光谱辐射信息具有较大差异,以验证本文方法的有效性。
3.1 实验一
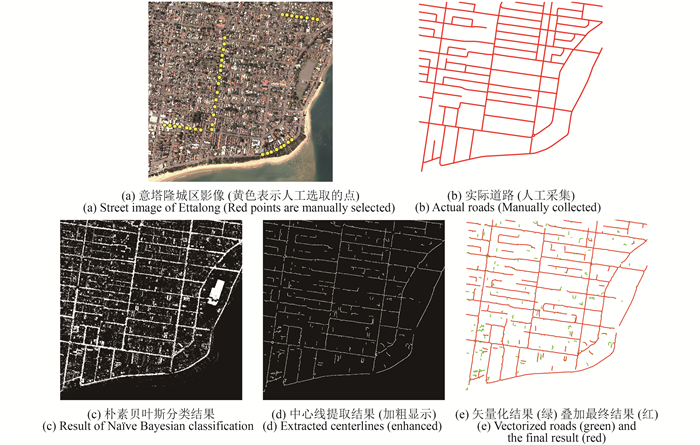
使用2013年摄取的美国亚特兰大郊区0.3 m分辨率GoogleEarth影像,从中截取6887×4705像素的部分影像用于实验(图 6(a)),并选用对应地区2008年的WikiMapia地图(转绘成矢量数据)对提取过程进行辅助。该影像中包含了两种不同材质的道路(沥青路和水泥路),其光谱信息差异很大,且树木和阴影较多,部分道路被遮挡。由于沥青路颜色与水系、阴影较接近,同谱异物现象带来的干扰很严重,可以验证本文方法处理干扰物的表现。由于该地区地图与影像的差异较小,为验证本文方法的提取能力,仅对部分典型道路进行了转绘,并包含了两条实际已消失的道路(检验排除错误信息的能力)(图 6(b))。选用2013年相应地区的Google地图(与影像较为吻合)转绘成矢量数据,作为提取结果的参照(图 6(c))。利用图 6(a)以及图 6(b)所对应的矢量数据,使用本文方法进行道路提取,朴素贝叶斯分类的结果如图 6(d),道路中心线提取结果如图 6(e),最终的矢量化道路提取结果如图 6(f)。图 6(f)中,绿色部分是2.7节断线连接和毛刺去除处理前的结果,包含了无效的短枝,而红色部分为最终的道路提取结果(下同)。

3.3 实验三
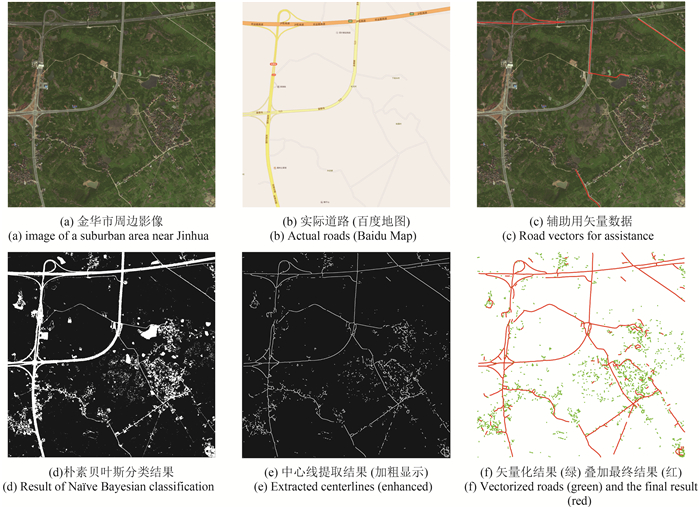
使用靠近中国浙江省金华市的0.6 m分辨率百度卫星影像(如图 8(a)),该图像大小为4864×4864像素。为对照真实的道路情况,截取了该地区所对应的百度电子地图影像,如图 8(b)。该地图与实际的道路情况吻合,可以作为标准道路,用于对道路提取结果进行评价。根据图(b)可了解到,原卫星影像包含了国道、省道、乡村道路三种不同等级的道路,其材质、宽度和几何特征都存在较大差异,可以验证本文方法同时处理不同道路时的有效性。依据图 8(b)人工采集了部分道路作为辅助用的矢量道路,如图 8(c),可看到采集的结果并不与影像严格吻合,局部存在偏移,有小段道路落在了影像中的非道路区域或者干扰物内。利用图 8(a)以及图 8(b)所对应的矢量数据,使用本文方法进行道路提取,各步骤的处理结果如图 8(d)、图 8(e)、图 8(f)。
4 精度评价
为了衡量本文方法的提取精度,采用完整性
| $ CP = \frac{{TN}}{{TN + FN}} $ | (7) |
| $ CR = \frac{{TP}}{{TP + FP}} $ | (8) |
| $ QL = \frac{{TP}}{{TP + FP + FN}} $ | (9) |
式中,
对实验一、实验二和第2节中示例图像的实验结果与实际道路进行比较,判别结果如图 9,其中绿色表示匹配的实际道路,蓝色表示未匹配的实际道路(漏检道路),红色表示未匹配的提取道路(错检道路)。依照各指标对本文算法的精度进行评价,统计数据如表 1,可见取得的整体精度在80%以上。
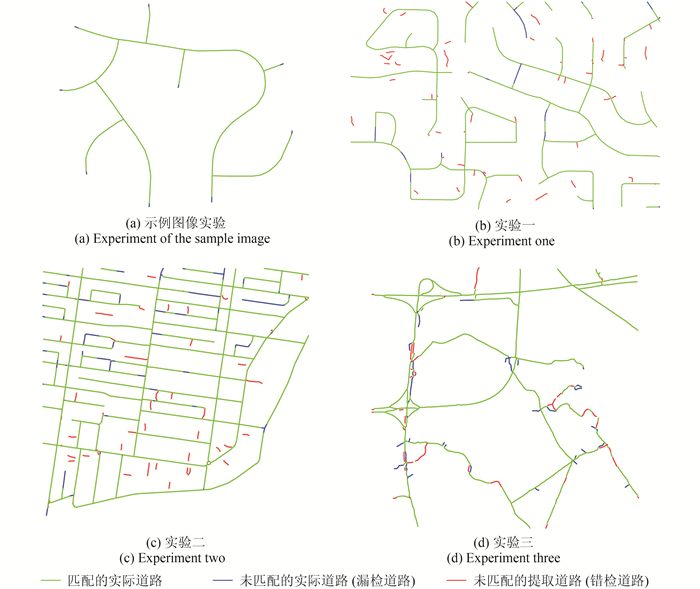
表 1 本文方法精度评价
Table 1 Performance of the proposed method
| 示例图像实验 | 2434 | 67 | 2467 | 0 | 97.32 | 100.00 | 97.35 |
| 实验一 | 46601 | 2840 | 46920 | 5948 | 94.26 | 88.75 | 84.22 |
| 实验二 | 76402 | 8157 | 75161 | 6048 | 90.35 | 92.55 | 84.10 |
| 实验三 | 37699 | 3633 | 39538 | 4115 | 91.21 | 90.73 | 82.95 |
以上实验数据表明,本文算法对于彩色高分辨率影像的处理结果较为稳健,无论是在矢量数据辅助或是人工选点引导下,均能够有效提取出矢量化道路数据。
对本文在提取过程中的各步骤进行考察,可得出:(1) 矢量数据或人工辅助下的朴素贝叶斯分类方法能够较为完整地保留道路信息,但受限于同谱异物现象,无法剔除辐射特征与道路接近的建筑物、空地等干扰区域;(2) 邻域质心投票算法能够有效回避团块状干扰区域的检测,但对于狭长的建筑物等干扰物无法有效剔除,且中心线提取过程伴有一定信息损失,部分交叉口及道路端点未被提取;(3) 矢量化算法能够高效完成较为理想的数据转换;(4) 断线连接及毛刺剔除算法虽然出现了部分错误判断,但总体上起到了排除无关干扰和复原道路信息的作用,提高了提取结果的精度。整体来看,本文算法的局限在于无法排除成排的建筑物、狭长的连续阴影等形状和光谱特征接近道路的干扰区域的影响,导致一些误提取;此外对车辆、树木等遮挡物的处理不够理想,致使部分道路未得到有效检测。
5 结论
为解决从高分辨率影像全自动提取道路的困难,提出了一种矢量数据辅助下的道路提取方法。相比现有的利用矢量数据信息的道路提取方法,该方法能够对矢量数据所对应的图像局部区域的形状进行判断,从而排除失效的位置信息,确保获取的训练样本的准确性;采用了监督分类方法,可以对矢量数据相对图像所缺失的道路进行提取。实验结果表明,利用该方法处理道路特征清晰、遮挡和同谱异物干扰不严重的影像时,能够得到较理想的提取精度;对于遮挡和同谱异物干扰严重的影像,该方法具备一定的信息提炼和信息修复能力,因此提取结果仍能够满足一定精度要求,体现出了较强的稳健性。然而,该方法未能完全解决遮挡物和同谱异物现象带来的干扰,实验结果中仍存在信息丢失和误提取等问题,需在下一步研究中进行改善。
参考文献(References)
-
Arthur D and Vassilvitskii S. 2007. k-means++:the advantages of careful seeding//Proceedings of the 18th Annual ACM-SIAM Symposium on Discrete Algorithms. Philadelphia, PA, USA:Society for Industrial and Applied Mathematics:1027-1035
-
Ding L, Yao H, Guo H T, Liu Z Q.2015.Using neighborhood centroid voting to extract road centerline from classifred image. Journal of Image and Graphics, 20 (11): 1526–1534 ( 丁磊, 姚红, 郭海涛, 刘志青. 2015. 利用邻域质心投票从分类后影像提取道路中心线. 中国图象图形学报, 20 (11): 1526–1534 ) [DOI: 10.11834/jig.20151112]
-
Dong M, Zhang H T, Zhu X K, Chen C X.2009.Change detection of road networks based on remote sensing image. Geomatics and Information Science of Wuhan University, 34 (2): 178–182 ( 董明, 张海涛, 祝晓坤, 陈春希. 2009. 基于遥感影像的地图道路网数据变化检测研究. 武汉大学学报(信息科学版), 34 (2): 178–182 )
-
Duan J. 2011. Research on Naïve Bayesian Classification and its Application. Dalian:Dalian Maritime University (段晶. 2011.朴素贝叶斯分类及其应用研究.大连:大连海事大学)
-
Guo D H, Weeks A and Klee H. 2004. Segmentations of road area in high resolution images//Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium. Anchorage, AK:IEEE:3810-3813 [DOI:10.1109/IGARSS.2004.1369953]
-
Guo D, Weeks A, Klee H.2007.Robust approach for suburban road segmentation in high-resolution aerial images. International Journal of Remote Sensing, 28 (2): 307–318 [DOI: 10.1080/01431160600721822]
-
Ji F, Gao X B, Xie S Y.2012.Weak edge detection using Mean-shift filtering and histogram enhancement. Journal of Image and Graphics, 17 (6): 651–656 ( 冀峰, 高新波, 谢松云. 2012. Mean-shift滤波和直方图增强的图像弱边缘提取. 中国图象图形学报, 17 (6): 651–656) [DOI: 10.11834/jig.20120606]
-
Kumagai J, Zhao H J, Nakagawa M and Shibasaki R. 2001. Road extraction from high-resolution commercial satellite data//Paper presented at the 22nd Asian Conference on Remote Sensing. Singapore:[s.n.]
-
Li G Y, Hu Y.2008.Road feature extraction from high resolution remote sensing images:review and prospects. Remote Sensing Information (1): 91–95 ( 李光耀, 胡阳. 2008. 高分辨率遥感影像道路提取技术研究与展望. 遥感信息 (1): 91–95) [DOI: 10.3969/j.issn.1000-3177.2008.01.018]
-
Liu P F. 2010. Research on Road Extraction and Change Detection from Medium or Low Resolution Images with Vector Data. Wuhan:Wuhan University (刘朋飞. 2010.基于矢量数据的中低分辨率影像道路提取和变化检测研究.武汉:武汉大学)
-
Maillard P, Cavayas F.1989.Automatic map-guided extraction of roads from SPOT imagery for cartographic database updating. International Journal of Remote Sensing, 10 (11): 1775–1787 [DOI: 10.1080/01431168908904007]
-
Mena J B, Malpica J A.2005.An automatic method for road extraction in rural and semi-urban areas starting from high resolution satellite imagery. Pattern Recognition Letters, 26 (9): 1201–1220 [DOI: 10.1016/j.patrec.2004.11.005]
-
Miao Z L, Shi W Z, Zhang H, Wang X X.2013.Road centerline extraction from high-resolution imagery based on shape features and multivariate adaptive regression splines. IEEE Geoscience and Remote Sensing Letters, 10 (3): 583–587 [DOI: 10.1109/LGRS.2012.2214761]
-
Sui H G, Li D R, Gong J Y.2003.Automatic change detection for road networks from images based on GIS. Geo-spatial Information Science, 6 (4): 44–50 [DOI: 10.1007/BF02826949]
-
Wang G C. 2010. Research and Application of Naïve Bayesian Classifier. Chongqing:Chongqing Jiaotong University (王国才. 2010.朴素贝叶斯分类器的研究与应用.重庆:重庆交通大学) http://cdmd.cnki.com.cn/Article/CDMD-10618-2010160738.htm
-
Wang S. 2014. Research on Road Extraction from High Resolution Remote Sensing Images. Nanjing:Nanjing University of Science and Technology (王双. 2014.高分辨率遥感影像道路提取方法研究.南京:南京理工大学) http://cdmd.cnki.com.cn/Article/CDMD-10288-1014175523.htm
-
Wang X C, Fu D M, Li X G, Liu Y.2009.Complex infrared objects segmentation based on mean-shift filtering and ant colony clustering. Infrared Technology, 31 (9): 545–548 ( 王潇晨, 付冬梅, 李晓刚, 刘燕. 2009. 基于meanshift滤波和蚁群聚类的复杂红外目标分割. 红外技术, 31 (9): 545–548) [DOI: 10.3969/j.issn.1001-8891.2009.09.012]
-
Wiedemann C, Heipke C, Mayer H and Jamet O. 1998. Empirical evaluation of automatically extracted road axes//Bowyer K W and Jonathon P, eds. Phillips Empirical Evaluation Techniques in Computer Vision. Los Alamitos, CA, USA:Wiley-IEEE Computer Society Press:172-187
-
Wu X Y, Che D K, Dai F.2010.Automatic road extraction and change detection based on image and vector. Mine Surveying (1): 62–64 ( 吴晓燕, 车登科, 戴芬. 2010. 影像与矢量结合的道路自动提取及变化检测. 影像与矢量结合的道路自动提取及变化检测.矿山测量 (1): 62–64) [DOI: 10.3969/j.issn.1001-358X.2010.01.018]
-
Yang Z Y, Wang Y, Yang Z D, Wang C D.2009.A new color difference formula in RGB color space. Journal of Computer Application, 29 (2): 465–467 ( 杨振亚, 王勇, 杨振东, 王成道. 2009. 一种新的RGB色差度量公式. 计算机应用, 29 (2): 465–467) [DOI: 10.3724/SP.J.1087.2009.00465]
-
Ye F M, Su L, Li S K, Tang J L.2006.Review and thought of road extraction from high resolution remote sensing images. Remote Sensing for Land and Resources, 18 (1): 12–17 ( 叶发茂, 苏林, 李树楷, 汤江龙. 2006. 高分辨率遥感影像提取道路的方法综述与思考. 国土资源遥感, 18 (1): 12–17) [DOI: 10.6046/gtzyyg.2006.01.03]
-
Zhang J Q, Liu P F, Wang H, Liu Y L.2010.Semi-automatic Road Extraction with Meanshift Algorithm. Geomatics and Information Science of Wuhan University, 35 (6): 719–722 ( 张剑清, 刘朋飞, 王华, 刘永亮. 2010. 利用Meanshift进行道路提取. 武汉大学学报(信息科学版), 35 (6): 719–722 )
-
Zhou L J, Wang H, Wang W B, Zhang N.2012.Parallel KMeans algorithm for massive data. Journal of Huazhong University of Science and Technology (Natural Science Edition) (S1): 150–152 ( 周丽娟, 王慧, 王文伯, 张宁. 2012. 面向海量数据的并行KMeans算法. 华中科技大学学报(自然科学版) (S1): 150–152 )


