|
|


|
收稿日期: 2015-05-11; 修订日期: 2015-10-09;
优先数字出版日期: 2015-10-16
基金项目: 国家自然科学基金(编号;41171323); 中国地质调查局地质矿产调查评价项目(编号: 12120115040601)
第一作者简介: 车美琴(1989—), 男, 硕士研究生, 主要研究方向为极化SAR图像处理。E-mail: lastrye00@gmail.com
通信作者简介: 杜培军(1975-), 男, 教授, 研究方向为遥感信息处理和地学应用。E-mail: dupjrs@gmail.com
中图分类号: TP79
文献标识码: A
文章编号: 1007-4619(2016)02-0303-12
|
摘要
利用全极化SAR影像进行城市地区地物分类和目标识别时,极化方位角偏移、散射类型复杂多样以及弱后向散射地物难以区分等问题影响了图像分类和目标识别的准确性。针对这些问题,提出一种利用目标散射矢量模型TSVM(Target Scattering Vector Model)生成的旋转不变极化参数组合提取城市区域典型人工地物(建筑、道路、广场和桥梁等)的方法。首先,采用目标散射矢量模型分解和Relief特征选择算法提取出表征目标对称性的旋转不变极化参数、表征散射机理的散射角旋转不变极化参数;然后利用支持向量数据描述SVDD(Support Vector Data Description)分类器快速提取典型人工地物。利用南京市Radarsat-2 全极化SAR数据进行实验,结果表明提出的方法抑制了地形起伏的山地或建筑分布不规则城区的极化方位角效应,有效解决了全极化SAR影像中人工地物提取的难题。同时,相比光学影像利用生物物理组合指数BCI(Biophysical Composition Index)和归一化建筑指数NDBI(Normalized Difference Built-up Index)提取城市人工地物的方法,对称性极化参数和散射角参数组合能有效区分出城市建筑用地和具有相似光谱特征的裸地,其检测精度提高10%以上。
关键词
旋转不变极化参数, 全极化SAR, 人工地物检测, 支持向量数据描述, 特征选择
Nanjing 210023, China;
Abstract
Man-made target extraction from space-borne polarimetric synthetic aperture radar (SAR) imagery has been extensively investigated. However, challenging issues caused by polarization orientation angle (POA) shifts and various complex backscattering signatures still remain. Utilizing quad-polarimetric SAR (Quad-PolSAR) imagery for classification and target detection in urban areas has three major issues: (1) POA shifts; (2) Complex backscattering diversity; (3) Close similarity between targets of weak backscattering signals.This study proposes a novel approach to extract urban synthetic targets from Quad-PolSAR imagery with roll-invariant parameters to overcome the three aforementioned issues.
This study used the dataset of Quad-PolSAR imagery acquired by Radarsat-2 to extract the synthetic targets in the urban area. Landsat 8 imagery was used as a reference for comparison.The case study area is located in Nanjing City, Jiangsu Province, People’s Republic of China.In the first step of the proposed method, the target scattering vector model, which supplied more parameters than the previously proposed models,was applied to generate the roll-invariant parameters. Subsequently, the relief algorithm suitable for binary classification was introduced to optimize polarization parameters. Considering feature selection and scattering mechanism analysis, two parameters, namely,scattering-type magnitude (parameter αs) and target helicity (parameter τm), are adopted. Finally, support vector data description was employed to identify synthetic targets because of its efficiency and robustness. In addition to αs and τm, morphological profiles were employed to improve the extracted result.
Result shows that the roll-invariant parameters αs1(the domain scattering-type magnitude) and τm2(the secondary scattering helicity of target) are effective for extracting the urban built-up area. Cropland, vegetation, and bare soil can be easily distinguished from the synthetic targets by integrating the parameters τm2 and αs1.The biophysical composition index (BCI) and normalized difference built-up index (NDBI)are derived from optical images. However, these indices confuse bare soil and synthetic targets. The proposed method can well recognize more synthetic targets,such as squares, streets, and other weak backscattering targets than typical decomposition like the Yamaguchi four-component decomposition. The parameters of H/A/alpha decomposition have the roll-invariance property. However,the entropy of urban areas and vegetation are highly similar.
Compared with the traditional method of POA compensation applied in the Yamaguchi four-component decomposition, the roll-invariant parameters are more effective in solving the problem of the POA shift.The introduced decomposition model supplies more parameters than H/A/alpha decomposition, which leads to higher accuracy in extraction. The selected parameters αs1(scattering angle characteristics) and τm2(symmetry polarization characteristics) of synthetic targets homogeneously distributed in space, which prevents the built-up area from being segmented into several classes and improves the efficiency of the extraction algorithm. Furthermore, the extracted result shows that the proposed method has significant advantages in distinguishing bare soil and urban targets compared with the results of optical indices, such as BCI and NDBI. The analysis of the scattering mechanism and experimental results reveal the effectiveness of the roll-invariant parameters.
Key words
poll-invariance, polarimetric parameters, Quad-PolSAR, mam-made targets extraction, Target Scattering Vector Model(TSVM), Support Vector Date Description(SVDD)
1 引 言
国家新型城镇化规划(2014年-2020年)报告显示,2014年中国有7.3亿人口居住在658个城市,其中京津冀、长三角、珠三角三大城市群以2.8%的国土面积集聚了18%的总人口。城镇化过程的研究和评估对城市规划、城市政策制定、资源利用与管理及可持续发展具有重要意义。遥感作为有效的空间对地观测技术手段,具有探测范围广、数据信息量大和重复连续观测等优点,在城市化进程与城市规划管理中具有广泛应用(陈述彭和谢传节,2000)。如利用光学遥感影像进行城市人口密度制图、城市不透水面提取和城市化扩展等研究(曾垂卿等,2009;Zhou等,2012;Kumar和Sangwan,2013)。与光学遥感相比,合成孔径雷SAR达具有主动成像、全天时、全天候、穿透性的优势,尤其针对多云雨雾雪地区,SAR能够排除云雾等气象因素的干扰,具有很好的应用价值。近年来发达国家大力发展星载全极化SAR技术,加拿大的Radarsat-2、日本的ALOS-PALSAR和德国的TerraSAR-X卫星提供了不同分辨率的多极化和全极化SAR数据。相比单极化和多极化SAR数据,全极化SAR能够获取HH、HV、VH和VV共4种极化方式的数据,包含了更为丰富的地物目标极化信息,具有更好的地物分类与识别能力(Lee和Pottier,2009)。全极化SAR图像地物识别与分类技术已在森林、资源环境、海洋监测、地质灾害等领域中扮演了愈加重要的角色,具有广泛的应用前景。
目前极化SAR城市应用研究主要集中在以下几个方面:(1)城市范围提取:利用ASAR低分辨率强度数据和DEM数据快速提取全球城市范围(Gamba和Lisini,2013);结合GLCM、LISA特征以及地形坡度数据实现中等分辨率星载SAR数据城市范围提取(Ban等,2015);融合光学和极化SAR影像改善城市不透水面提取精度(Zhang等,2014)。(2)城市土地利用或覆盖分类制图:通过散射总功率、体散射功率和极化方位角逐步实现城市用地分类(Kajimoto和Susaki,2013);利用极化SAR影像短期监测城市土地覆盖变化(Yeh和Qi,2015)。(3)城市人工目标和典型地类提取:利用高分辨率极化SAR数据,通过时频分析(TF)技术实现了城市区域人工目标的提取(Wu等,2015;Zhu等,2014;Ferro-Famil和Pottier,2007);在超高分率SAR影像下对桥梁进行极化信号分析(Lee等,2006)。
然而,受城市下垫面复杂极化散射特征影响,中高分辨率极化SAR影像城市地表覆盖分类和目标提取中常面临以下难题:
(1)道路、水体和裸地等弱后向散射地物容易发生混淆,影响地物分类和目标提取精度(史磊等,2012)。
(2)城市地区全极化SAR影像中目标散射矩阵、协方差矩阵和相干矩阵等易受极化方位角POA(Polarization Orientation Angle)影响,进而改变了目标散射体的极化散射特性。同时,这种极化方位角偏移会使雷达方位向地形倾斜的散射体后向散射特征发生改变,影响物理模型极化分解的准确性(Lee和Ainsworth,2011;Zhang等,2010;Chen等,2013)。这种变化不仅发生在地形起伏较大的区域,城市地区倾斜的屋顶、朝向和雷达视线方向LOS(Radar Line of Sight)相倾斜的建筑分布也会使同类地物的散射矩阵发生变化(Iribe和Sato,2007;Lee和Ainsworth,2011;Kajimoto和Susaki,2013);而且从散射机理上看,倾斜屋顶或垂直墙面发生的单次散射、地面和垂直墙面的偶次散射或奇次散射的极化方位角偏移现象各有差异(Kimura等,2005)。
(3)城市区域人工目标和其他典型人造地物有表面散射、偶次散射、奇次散射和体散射等多种散射类型,基于物理散射模型的分类方法中城市建设用地被划分成多种不同的类别,增加了分类识别的难度(Samat等,2015)。
针对以上问题,相关学者提出极化方位角补偿抑制极化方位角效应,以及利用多次逐步分类的方法实现弱散射地物区分(Lee和Ainsworth,2011;Kajimoto和Susaki,2013;史磊等,2012)。极化方位角补偿的方法是通过估计的极化方位角将散射特征矩阵围绕雷达视线方向(LOS)进行旋转,但该方法在补偿过程中会产生负的散射功率异常值,同时补偿效果也受极化方位角估计精度的影响(Lee和Ainsworth,2011;Yamaguchi等,2011)。不同人工地物引起的极化方位角偏移差异限制了极化方位角在城市地区的估计效果。
本文提出一种利用旋转不变参数快速提取城市典型人工地物的方法,能够解决极化SAR图像分类过程中极化方位角偏移、弱散射地物区分和城市人工目标散射类型复杂多样的问题。应用目标散射矢量模型TSVM(Target Scattering Vector Model)极化分解方法获得绕雷达视线方向(LOS)旋转不变的极化参数(Touzi,2007),采用Relief特征选择算法提取出表征目标对称性的旋转不变极化参数τm和表征散射机理的旋转不变散射角极化参数αs,综合τm-αs特征极化参数并加入相应形态学剖面特征,应用支持向量数据描述SVDD单分类器算法(Support Vector Data Description)提取出城市人工地物区域。
2 典型人工地物提取方法
目前基于光学影像和极化SAR的城市目标提取与识别主要围绕建设用地、不透水面和单要素人造目标进行研究。为了方便研究和讨论,本文中城市典型人工地物主要包括道路、广场、立体建筑和桥梁等非自然属性的地物类型。
2.1 典型人工地物旋转不变特征参数获取
旋转不变特性是指散射特征绕雷达视线方向旋转并保持不变的特性。极化方位角偏移是入射平面围绕雷达视线旋转的结果(Lee和Pottier,2009),这类参数不受极化方位角偏移的影响,适合作为城市和地形起伏地区极化分类与目标识别的特征参数。在全极化SAR图像中,雷达目标后向散射极化信息记录在Sinclair散射矩阵中。
$S = \left[ {\begin{array}{*{20}{c}} {{S_{{\text{hh}}}}}&{{S_{{\text{hv}}}}} \\ {{S_{{\text{vh}}}}}&{{S_{{\text{vv}}}}} \end{array}} \right]$ (1)
${k} = \frac{1}{{\sqrt 2 }}[{S_{\rm hh}} + {S_{\rm vv}} \quad {S_{\rm hh}} - {S_{\rm vv}} \quad 2{S_{\rm hv}}]$ (2)
${T3} = \left\langle {{k} \times {{{k}}^{\rm H}}} \right\rangle $ (3)
式中,S为点目标散射体Sinclair散射矩阵,h表示水平极化发射和接收模式,v表示垂直极化发射和接收模式,在单站后向散射条件下目标散射矩阵满足互易性假设Svh = Shv。但是Sinclair散射矩阵不适于表征动态分布式目标的极化特征,对于分布式目标需要用二阶统计量相干矩阵T3表示,式(3)中H表示相应矢量的共轭转置,<>表示空间平均过程。
$\Sigma = \left[ {\begin{array}{*{20}{c}} {{\lambda _1}}&0&0 \\ 0&{{\lambda _2}}&0 \\ 0&0&{{\lambda _3}} \end{array}} \right]$ (4)
式(5)将T3进行特征值分解,
${T3} = {{U}_3}\Sigma {U}_3^{ - 1} = {\lambda _i}{{u}_i} \times {{u}_i}^{\rm H} = {\lambda _i}{{T}_i}(i = 1,2,3)$ (5)
式中,Σ为特征值λ1、λ2、λ3构成的矩阵,U3为特征矢量${ {u}_i}$构成的矩阵,Ti为单一特征值所对应的相干矩阵。相干矩阵T3的特征值在酉变换下具有不变性,是获取旋转不变参数的方式之一(Lee和Pottier,2009)。除此之外,Cloude和Potter(1997)提出了H/A/alpha分解方法,通过参数化T3特征矢量引入旋转不变散射角极化参数,并和特征值衍生的极化熵H和各向异度参数A构成了3维H/A/alpha 分类空间。Touzi在Kennaugh-Huynen合对角化的基础上,提出目标散射矢量模型TSVM(Target Scattering Vector Model),相比H/A/alpha极化分解模型,目标散射矢量极化分解引入更为丰富的旋转不变参数,在城市分类和目标特征提取中发挥了TSVM模型多参数和旋转不变的优势(Besic和Vasile,2015;Bhattacharya和Touzi,2012;Bai等,2014)。如式(6)(7)所示,通过分离旋转矩阵R(2φ)获得旋转不变参数Φαs、τm、αs,其他参数包括最大振幅m,相位参数φ和极化方位角参数φ(Touzi,2007)。针对城市区域分布式面状散射目标,本文采用非相干极化分解模型,将相干矩阵T3的参数化后的特征值λ1、λ2、λ3和对应特征矢量ui带入式(7),分别得到相应特征值的非相干分解参数分量λi、mi、${\Phi _{\alpha {s^i}}}$、${\varphi _i}$、${\tau _{{m^i}}}$和${\alpha _{{s^i}}}$。最大特征值所对应参数分量为主分量,表征了散射体目标的主导散射机制。
${{R}}(2\varphi)= \left[ {\begin{array}{*{20}{c}} 1& 0& 0 \\ 0& {\cos 2\varphi }& { - \sin 2\varphi } \\ 0& {\sin 2\varphi }& {\cos 2\varphi } \end{array}} \right]$ (6)
$\begin{array}{l}{\rm{e}}_T^{SV} = m\left({\frac{{\left| {{\rm{e}}_T^{SV}} \right|}}{m}} \right){{\rm{e}}^{j\phi }} \times \\{{R}}(2\varphi)\times \left[ {\begin{array}{*{20}{c}}{\cos {\alpha _s}\cos 2{\tau _m}}\\{\sin {\alpha _s}{{\rm{e}}^{j{\phi _{{\alpha _s}}}}}}\\{ - j\cos {\alpha _s}\sin 2{\tau _m}}\end{array}} \right]\end{array}$ (7)
式中,SV表示散射矢量。目标散射矢量模型(TSVM)中旋转不变参数反映了地物目标的散射规律和几何特征。对于对称散射体目标,各分量特征值加权所得参数αs(0°<αs<90°)所反映的物理散射规律和H/A/alpha分解散射角参数α一致(Touzi,2007)。此外Touzi证明了非对称目标α参数与αs和τm相关,具有以下基本规律:城市区域以人工建筑与地面产生二次散射为主,αs接近于90°;林地发生多次散射过程,αs接近于45°;而道路、水体和裸地则以单次散射为主,αs接近于0°。参数τm(-45°<τm<45°)是目标最大特征极化状态椭圆率角,反映出目标的几何对称性。对称性目标散射体有以下几类:在笛卡儿线极化基下,具有相同的散射矩阵的球体、薄板和三面角;带一定角度的旋转偶极子和二面角;而非对称散射体主要包括螺旋体和不规则的面目标(Huynen,1970)。参数τm基本规律可以概括为:人工地物例如建筑、道路等具有对称结构τm接近于0,非对称地物τm接近于45°(Lee和Pottier,2009)。可见,针对αs容易混淆水体、道路和裸地,可以利用对称性进行区分。参数Φαs(-45°<Φαs<45°)为对称目标的相位,能够弥补参数αs在湿地和林地分类中的不足(Touzi,2007)。综上分析,针对城市地区,目标散射矢量模型(TSVM)极化分解的旋转不变参数可用于城市用地分类和目标识别。
2.2 特征选取和特征分析
式(6)中,相干矩阵T3可以获得3个互不相关的相干矩阵分量,每一特征值所对应的相干矩阵分量反映了独立的目标散射机制,特征值描述了这3种散射分量的独立统计权重(Cloude和Pottier,1997)。目标散射矢量模型TSVM中3个特征值分别对应了一个极化参数集(${\Phi _{\alpha {s^i}}}$、φi、${\tau _{{m^i}}}$、${\alpha _{{s^i}}}$),不同参数分量表征了散射机制差异;特征值大小反映出该参数分量的统计权重,特征值越小,极化参数分量受噪声的影响越大,影响分类和识别的精度。因此,需要对TSVM极化参数进行特征选取,排除部分极化参数的消极影响,保留极化参数所表征的物理含义。
单类分类器是目标识别和提取的有效方法,相比二分类或多分类器,只需待识别单类型的正样本,节省了样本选取、训练和预测分类的时间。为此,本文利用支持向量数据描述SVDD(Support Vector Data Description)算法进行城市典型人工地物提取。SVDD是一种超球面支持向量机,利用核函数将样本映射到高维特征空间,将尽可能多正样本约束到最小超球体内并排除负样本从而获得分类边界,约束条件简单,稳定性好(Tax和Duin,2004;陈伟等,2012)。
此外,针对城市人工地物极化参数选择的问题,通过Relief特征提取算法来确定最适合的提取参数。Relief算法是一种针对两类问题的特征权重算法,适合利用单类样本进行模型训练(Arauzo-Azofra等,2004;Deng等,2010)。同时,Relief算法的运行时间随着样本的抽样次数和原始特征个数的增加线性增加,因而运行效率非常高(Kira和Rendell,1992;Sun和Li2006),能够快速、准确的根据目标样本确定不同特征的权重。算法基本原理如下:从训练集D中随机选择一个样本R,再从类别相同的样本中寻找与之距离最近的样本H,从和R不同类的样本中寻找距离最近样本N。
$w{\text{ }} = {\text{ }}{w_0} - {\text{ }}diff(R,H)/m{\text{ }} + {\text{ }}diff(R,H)/m$ (8)
式中,w0为特征初始权重,m为取样次数,diff表示获取样本特征的差异的函数。然后通过比较特征在区分R和H、R和N的能力来计算特征权重w。如果样本R和样本H的在该特征上的差异小于样本R和样本N在该特征上的差异,则该特征对分类是有益的,权重w增加;反之,权重值减小。以上过程随机取样m次,最后得到各个特征的平均权重。Relief算法特征的权重越大,表示该特征的分类能力越强,反之,则表示该特征区分能力越弱。算法中特征和类别的相关性是基于特征对近距离样本的区分能力。根据各个特征和类别的相关性赋予特征不同的权重,权重小于某个阈值的特征将被移除。Relief和SVDD算法具有很好的相容性,适合进行单类地物的检测与提取。
2.3 城市典型人工地物提取算法
根据2.2节的分析,提出利用旋转不变参数和单类分类器提取城市人工地物的算法流程(图 1):
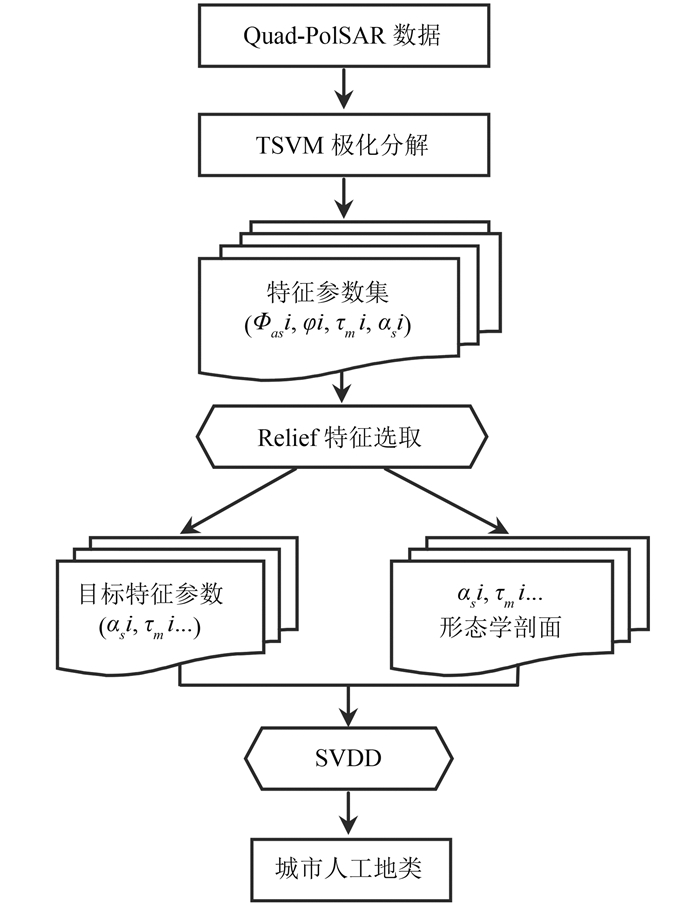

(1)利用相干矩阵进行TSVM极化分解获得旋转不变参数集(${\Phi _{\alpha {s^i}}}$、φi、${\tau _{{m^i}}}$、${\alpha _{{s^i}}}$)。
(2)利用Relief方法针对单分类选取最佳目标特征参数。
(3)利用SVDD算法综合极化-空间信息提取人工地物。形态学剖面MP(Morphological Profile)是一种能够抑制局部异质性像元,去除噪声并保留空间信息的扩展形态学方法,能够很好地抑制相干斑噪声的影响(Marpu等,2011; Benediktsson等,2001),优化提取结果。
3 实验与分析
3.1 实验数据和预处理
实验选取了南京市Radarsat-2卫星C波段全极化SAR数据产品(图 2)。产品方位向、距离向分辨率分别为8 m和25 m,获取时间为2013年3月。此外,为了和多光谱影像指数提取方法进行比较研究,选取临近时间点的L and sat 8 OLI影像数据(30 m分辨率)。选取的典型指数为生物物理组合指数BCI和归一化建筑指数NDBI,指数提取方法可参考相关文献(李全等,2005; Zha等,2003;Deng和Wu,2012)。
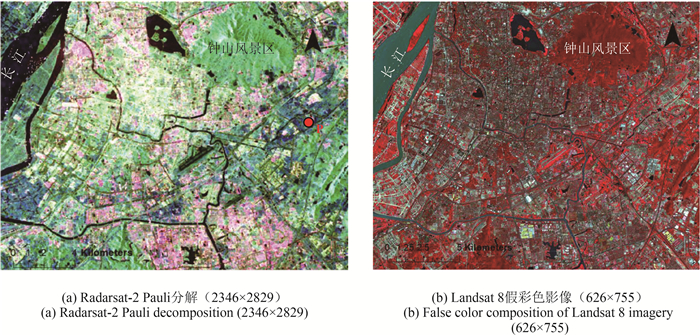
为了探究方法的适用性,所选研究区内包含水体、裸地、植被、建设用地、农田和湿地多种用地类型。此外,实验区中含有能产生明显的极化方位角偏移的钟山风景区和城市人工建筑,以说明旋转不变极化参数在目标识别与提取中的优势。
Radarsat-2全极化数据在PolSAR pro4.2软件平台进行辐射校正和地理编码,同时利用DEM数据(ASTER GDEM-V2)进行了地形起伏辐射校正和地理编码修正。全极化SAR图像的相干斑噪声影响了图像分割和分类的结果,采用精改Lee滤波器,通过多次实验在9×9的滤波窗口下获得了最佳滤波效果。
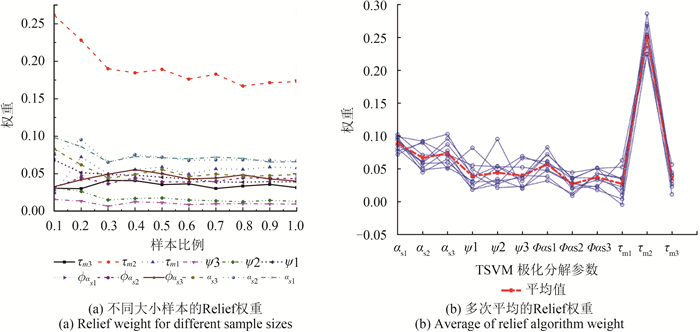
3.2 Relief算法提取αs、τm分量和特征分析
在Relief算法训练过程中,将城市人工地物作为正样本,林地、水体、农田和裸地等非目标地物类型作为负样本,对TSVM分解模型得到的样本特征空间进行特征选择。此外针对不同的样本量大小,取多次随机抽样实验的平均值作为参数权重。权重值与特征参数区分正负样本的能力呈正相关,权重值越高,参数识别正样本能力越强。从图 3可以看出,随着参与训练样本比例的不断增加,权重值较大的参数τm2、αs1对样本大小并不敏感,具有很好的稳定性。对TSVM极化分解的按照权重大小排序,权重值较大3个特征参数依次为τm2、αs1和αs3。τm2参数权重最高,区分能力最强,参数αs1与αs3权重值相近,因此下文将选取τm2、αs1进行特征分析。
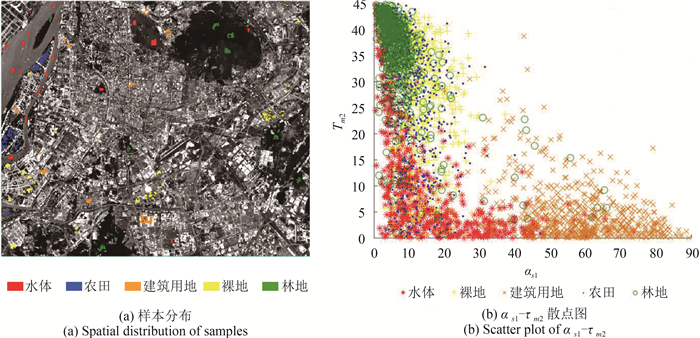
目标散射矢量模型极化分解的参数观测值与其物理散射机制直接相联系。依据H/A/alpha极化分解中极化熵和散射角(H-α)构成的分类空间,在低极化熵(0<H<0.5)区间分别对应布拉格表面散射(0°<α<42.5°)、偶极子散射(42.5°<α<47.5°或50°)和二面角散射以及偶次散射(α>47.5°或50°)(Lee和Pottier,2009)。除水体和林地外,主散射分量αs1与散射角参数α规律相一致:农田和裸地发生布拉格表散射(αs1<40°),以偶极子散射体为主的林地αs1取值比农田和裸地更低,发生表面散射的水体集中分布于(αs1<50°),但少量分布于(αs1>50°);城市区域人工地物主要产生两介质表面的二次散射(45°<αs1<90°),道路、屋顶和墙面等则产生比较弱的单次表散射(30°<αs1<45°)。可见,针对水体和城市道路、广场需要其他特征参数进一步进行区分。
建筑、道路、广场和水体为对称性散射目标,理论上τm2值接近于0,非对称性目标|τm2|(τm2绝对值)接近45°。图 4(b)中,裸地、农田和林地|τm2|(τm2绝对值)分布重心均偏向45°。裸地和农田随着粗糙度的不同,少量分布低于15°。同时对于城市道路、广场和城市屋顶等结构对称性较强的人造目标,应用τm2参数可以从布拉格表散射中区分出来。除水体之外,αs1、τm2参数组合实现了城市人工地物和其他地物类别的区分。所选实验数据部分水体αs1、τm2散点分布范围与理论值不符,造成水体和建筑等人造建筑目标难以区分(水体悬浮物、水面波浪和水深可能成为影响其散射特性的重要因素,需要进一步讨论研究)。针对此问题,提出利用散射总功率或体散射功率的方法加以区分水体。水体散射总功率或体散射功率相对其他地物更低,而且散射总功率和体散射功率受极化方位角影响较小(Kajimoto和Susaki,2013),可通过具有旋转不变性质的相干矩阵特征值求和获得总散射功率值。式(9)中后向散射的总功率Span等于相干矩阵或协方差矩阵的迹,其中λ1、λ2、λ3为T3的特征值。
$ Span={\rm{tr}}({T3})=\lambda_1+\lambda_2+\lambda_3$ (9)
针对南京市Radarsat-2数据,城市建筑用地的αs1和τm2参数特征空间上均质分布,有利于分类和识别提取。从散点图上可以看出,αs1和τm2参数集中分布在45°<αs1<90°,-15°<τm2<15°的范围。本文结合散射机制和特征选择分析,选取散射角主分量参数αs1和对称性参数τm2作为典型人工地物提取的实验参数,下文中将其简称为a-τ方法。
3.3 典型人工地类提取效果分析
单类分类器仅用正样本参与训练学习致使无法通过建立混淆矩阵评价分类器提取精度,因此利用正样本训练、负样本参与测试的方法来评价分类器提取结果,样本详细设置如表 1所示。首先,为了对比分析NDBI、BCI和α-τ方法区分建筑等人工地类和水体、裸地、农田能力的大小,样本集设置了不同类别下相同的样本比例。总样本包含城市人工地物、水体、林地、裸地和农田五种类别,每一类别的取样比例均为0.2%。正样本为典型城市人工地物类别,负样本为水体、林地、裸地和农田,总样本比例为1%。样本集分为训练样本和测试样本,用训练样本中的正样本训练SVDD模型,测试样本中包含正样本和负样本。基于混淆矩阵的精度评价参数反映了本文方法区分人工地物和其他地物类别能力。采用两组训练样本集,样本集1包含水体类别,样本集2从样本集1中剔除水体样本,以说明水体对识别的影响;另外,光学和极化SAR使用的样本具有相同的空间分布,保证了不同方法的可比性。
表 1 SVDD训练样本设置
Table 1 Setting of SVDD training sample datasets
| 数据 | 正样本 | 负样本 | ||||
| 人工地物 | 林地 | 水体 | 农田 | 裸地 | ||
| Landsat 8 | 945 | 945 | 945 | 945 | 945 | |
| Radarsat-2 | 13273 | 13273 | 13273 | 13273 | 13273 | |
图 5分别为NDBI、BCI、Yamaguchi 四分量分解、H/A/alpha极化分解、α-τ以及加入形态学剖面特征MP的α-τ方法城市人工地物提取结果,白色部分显示所提取的人工地类,黑色部分则显示其他类别。基于L and sat 8 OLI光学影像提取的结果显示在图 5(a)和图 5(b)中。
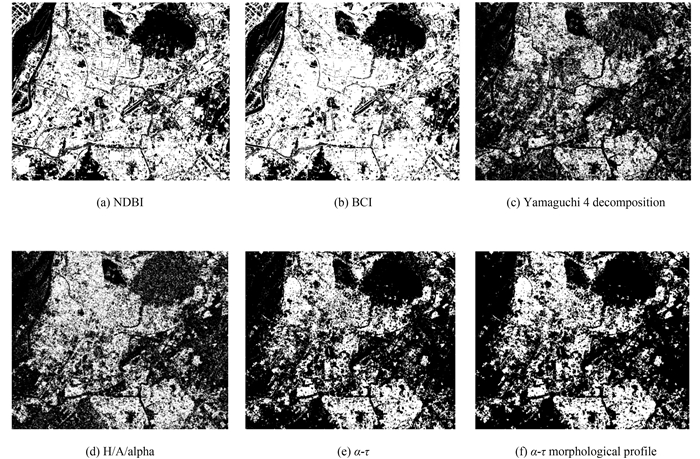
实验对不同的特征集分别进行了10次训练和测试,取10次结果的平均值作为最终提取精度。表 2列出了BCI、NDBI、α-τ以及α-τ形态学剖面人工地类提取的总体精度。需要指出的是BCI指数无法直接区分出水体和暗不透水面,需要预先剔除(Deng和Wu,2012)。实验样本集1没有对水体进行预处理,提取精度为63.08%,从表 3可以看出,水体基本被识别为城市人工用地;对于排除水体类别的样本集2其提取精度提高到80.04%,因此,重点对以样本集2的结果进行分析。表 3中显示了样本集1水体、植被、农田、裸地和城市人工地类正确检测的像元统计结果。对比从提取结果和检测精度,本文提出的方法在总提取精度和城市人工地物检测率上均优于多光谱影像下BCI、NDBI指数以及传统的Yamaguchi四分解、H/A/alpha极化分解模型分解方法。需要指出的是,对比图 5提取结果可以发现,由于全极化SAR成像的存在较大几何畸变,其空间可视性弱于光学影像,同时全极化SAR图像在滤波和相干矩阵平均化过程中分辨率下降,部分空间信息在处理过程中发生丢失,使得具有相对更高空间分辨率的全极化SAR影像,所提取结果图 5(c)-(f)中道路和建筑轮廓相对模糊,空间可视性相对较低。
表 2 不同提取方法总体精度比较
Table 2 Comparison of overall accuracy between different extraction methods
| 样本1 | 样本2 | |||
| OA/% | Kappa | OA/% | Kappa | |
| BCI | 63.08 | 0.31 | 80.04 | 0.57 |
| NDBI | 83.84 | 0.61 | - | - |
| H/A/alpha | 93.32 | 0.81 | 94.75 | 0.86 |
| Yamaguchi 四分量 | 88.99 | 0.62 | - | - |
| α- τ | 94.52 | 0.84 | 97.82 | 0.94 |
| α- τ 形态学剖面 | 96.96 | 0.90 | 98.62 | 0.96 |
| 注:OA整体分类精度。 | ||||
从表 2中可以看出,基于全极化SAR影像的提取方法对比光学指数方法,城市地物识别精度均高于光学指数BCI和NDBI方法,说明城市人工地物的后向散射特性能更好地区分于自然属性地物。表 3中,BCI指数提取精度和归一化建筑指数裸地识别精度均相对较低,只有37.8%和31.7%,从而降低了总体识别精度。因此多光谱数据在提取城市不透水面或城市建筑用地过程中,仅从光谱信息中难以区分易混淆的裸地和城市建筑用地。本文提出的方法,包括基于SAR图像的极化分解方法均优于光学影像的提取结果,能够很好地区分城市人工地物和裸地。
表 3 样本集1水体、植被、农田、裸地和城市人工地类的检测率
Table 3 Detect rate of water, vegetation, farm, bare soil and man-made target
| BCI/% | NDBI/% | (H/A/alpha)/% | Yamaguchi/% | ( α- τ)/% | ( α- τ MP)/% | |
| 水体 | 0.14 | 99.92 | 76.19 | 100.00 | 75.81 | 84.99 |
| 植被 | 99.56 | 99.58 | 90.67 | 88.94 | 98.33 | 99.27 |
| 城市 | 83.44 | 82.67 | 93.75 | 62.03 | 98.45 | 99.24 |
| 农田 | 98.04 | 95.22 | 95.65 | 96.44 | 98.58 | 99.45 |
| 裸地 | 37.08 | 31.70 | 96.78 | 96.55 | 96.87 | 97.03 |
旋转不变参数对城市区域的极化方位角效应具有很好的抑制效果,对城市人工地物的识别优于经过极化方位角补偿的散射模型极化分解方法。基于散射模型的极化SAR分类方法中,受极化方位角的影响,极化SAR影像在分类识别过程中面向雷达视线方向(LOS)的斜坡极易被识别为城市建筑用地。图 5(c)显示,改进的Yamaguchi四分量极化分解经过极化方位角补偿后(Yamaguchi等,2011),钟山风景区部分像元被错误识别为城市人工地类,说明基于极化方位角补偿的物理散射模型分解方法在解决极化方位角问题上仍具有一定局限性。从图 5(d)-(f)提取结果中可以看出,基于旋转不变参数的提取方法有效地抑制了极化方位角的影响,很好地区分出地形起伏的山地和城市建筑用地;此外,从表 3中可以看出,改进的Yamaguchi四分量极化分解提取方法针对城市人工地物的检测精度只有62.03%,明显低于利用旋转不变参数的H/A/alpha极化分解方法和本文提出的α-τ以及α-τ形态学剖面方法,说明基于旋转不变参数在极化方位角偏移效应的抑制性上优于极化方位角补偿策略,而且旋转不变参数提取方法适合在地形起伏较大、建筑朝向不规则的城市区域发挥优势,具有很好的针对性。
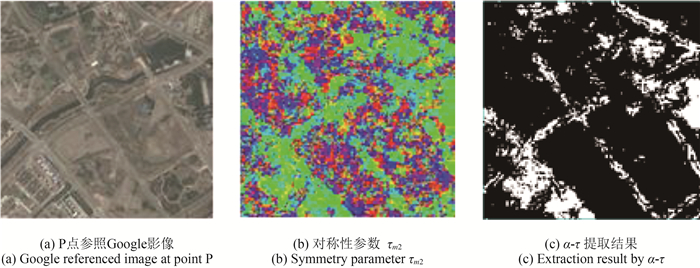
α-τ以及α-τ形态学剖面方法在结合物理散射机制和散射对称性以及散射功率的基础上能够在一定程度上实现弱后向散射地物区分。传统Yamaguchi四分量分解和Freeman分解方法,通过表散射、偶次散射和体散射信息无法区分出道路、广场、平静水体和裸地等弱散射地物,在散射机理上这些地物均发生表面散射;而且H/A/alpha极化分解方法中极化熵、散射角特征参数也难以实现区分。本文方法针对裸地、道路和广场等这些低能量后向散射信号体,能从目标对称性上正确地进行识别,城市人工用地单类检测精度比Yamaguchi四分量分解、H/A/alpha相应提高。此外,加入形态学剖面特征的α-τ方法,抑制极化SAR图像中存在的噪点,进一步提升了检测精度。图 6显示了图 2中参照点P的提取结果以及目标散射对称性参数。
综上所述,α-τ提取算法尽管在全极化SAR预处理阶段会损失部分空间信息,但是在城市人工地物识别上优于多光谱指数方法,对不同地物的识别能力相对更加平衡,并获得相对较高的提取精度。对比Yamaguchi四分量模型,α-τ方法和H/A/alpha方法因使用参数的旋转不变性有效避免了山地和城市建筑分布极化方位角效应带来的负面影响。但H/A/alpha方法受参数性质限制,仅一种具有物理含义的参数,提取精度低于本文提出的方法。可见,本文提出的α-τ提取算法相比几种参照方法具有明显优势。
4 结论
城市地区起伏地形和倾斜屋顶、朝向和雷达视线方向不相平行或不相垂直的建筑排列会引发极化方位角偏移的现象,不仅使城市建成区后向散射复杂多样,分类难度加大,而且造成基于传统物理散射模型分类过程中城市用地和面向雷达视线方向的倾斜地形相混淆,影响了地物分类的精度。因此,本文提出了应用旋转不变参数区分人工地类和其他地类的方法,具有以下特点和优点:(1)相比传统极化方位角补偿更有效地解决了极化方位角偏移效应的问题;(2)城市建设用地目标对称性极化特征τ和散射角极化特征α均质性好,不因散射类型复杂多样而产生不同子类,降低了对所用目标提取算法的要求,提高了算法运行效率,城市人工地物的散射角参数主分量αs1和对称性参数分量τm2能从散射机理上有别于其他地类,特征参数取值集中分布在45°<αs1<90°,-15°< τm2<15°之间。(3)南京市Radarsat-2全极化SAR数据实验结果表明,与多光谱建筑指数相比较,α-τ方法不仅能很好的区分裸地和城市人工地类,而且能够比较均衡地区分城市人工目标和其他类别(农田、裸地、水体和林地);(4)对比Yamaguchi四分量分解和H/A/alpha方法,α-τ方法利用对称性在道路和广场等弱散射人工地物的识别上取得了更好的识别效果,在林地和城市人工地类的区分上α-τ方法比H/A/alpha获得更高的提取精度,说明本文参数优于基于极化熵的人工地类提取。综上所述,从散射机理和实验验证的角度,均表明本文方法的有效性以及相对多光谱指数、传统极化分解模型的优势,对地形起伏和建筑朝向不规则的城区具有很好的适用性。
水体一般在极化雷达波作用下发生表面散射过程,但是实验数据中部分水体散射角参数αs1偏高是a-τ方法出现误差的主要原因,具体原因需进一步研究波浪、水深和水体悬浮物或者预处理过程对散射角参数a的影响。此外,极化SAR影像在滤波和相干矩阵平均过程中分辨率下降,损失部分地物极化信息,未来可以从滤波和提高影像分辨率的角度加以研究。
参考文献
-
Arauzo-Azofra A, Benítez J M and Castro J L. 2004. A feature set measure based on relief//Proceedings of the fifth international conference on Recent Advances in Soft Computing. Nottingham:RASC:104-109
-
Bai Y, Peng D, Yang X, Chen L and Yang W. 2014. Supervised feature selection for polarimetric SAR classification. International Conference on Signal Processing Proceedings, ICSP 01/2015:1006-1010[DOI:10.1109/ICOSP.2014.7015156]
-
Ban Y F, Jacob A and Gamba P. 2015. Spaceborne SAR data for global urban mapping at 30m resolution using a robust urban extractor. ISPRS Journal of Photogrammetry and Remote Sensing, 103:28-37.[DOI:10.1016/j.isprsjprs.2014.08.004]
-
Benediktsson J A, Arnason K and Pesaresi M. 2001. The use of morphological profiles in classification of data from urban areas//Proceedings of Remote Sensing and Data Fusion over Urban Areas. Rome, Italy:IEEE:30-34[DOI:10.1109/DFUA.2001. 985720]
-
Besic N, Vasile G, Chanussot J, and Stankovic S.2015. Polarimetric incoherent target decomposition by means of independent component analysis. IEEE Transactions on Geoscience and Remote Sensing, 53(3):1236-1247[DOI:10.1109/TGRS.2014.2336381]
-
Bhattacharya A and Touzi R. 2012. Polarimetric SAR urban classification using the Touzi target scattering decomposition. Canadian Journal of Remote Sensing, 37(4):323-33[DOI:10.5589/m11-042]
-
Chen S P and Xie C J. 2000. Urban remote sensing and urban geo-information system. Science of Surveying and Mapping. 25(1):1-8[DOI:10.3771/j.issn.1009-2307.2000.01.002](陈述彭, 谢传节. 2000. 城市遥感与城市信息系统. 测绘科学, 25(1):1-8[DOI:10.3771/j.issn.1009-2307.2000.01.002])
-
Chen S W, Ohki M, Shimada M and Sato, M. 2013. Deorientation effect investigation for model-based decomposition over oriented built-up areas. IEEE Geoscience and Remote Sensing Letters, 10(2):273-277[DOI:10.1109/LGRS.2012.2203577]
-
Chen W, Yu X C, Zhang L F and Zhang P Q. 2012. Indefinite OCSVM method for object detection in hyperspectral imagery. Journal of Remote Sensing, 16(6):1157-1172(陈伟, 余旭初, 张立福, 张鹏强. 2012. 采用非正定OCSVM的高光谱影像地物检测. 遥感学报, 16(6):1157-1172)
-
Cloude S R and Pottier E. 1997. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Transactions on Geoscience and Remote Sensing, 35(1):68-78[DOI:10.1109/36.551935]
-
Deng C B and Wu C S. 2012. BCI:a biophysical composition index for remote sensing of urban environments. Remote Sensing of Environment, 127:247-259[DOI:10.1016/j.rse.2012.09.009]
-
Deng Z H, Chung F L and Wang S T. 2010. Robust relief-feature weighting, margin maximization, and fuzzy optimization. IEEE Transactions on Fuzzy System, 18(4):726-744.[DOI:10.1109/TFUZZ.2010.2047947]
-
Ferro-Famil L and Pottier E. 2007. Urban area remote sensing from L-band PolSAR data using Time-Frequency techniques//Urban Remote Sensing Joint Event. Paris:IEEE:1-6[DOI:10.1109/URS.2007.371769]
-
Gamba P and Lisini G. 2013. Fast and efficient urban extent extraction using ASAR wide swath mode data. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 6(5):2184-2195[DOI:10.1109/JSTARS.2012.2235410]
-
Huynen J R. 1970. Phenomenological Theory of Radar Targets. TU Delft:Delft University of Technology:1-219
-
Iribe K and Sato M. 2007. Analysis of polarization orientation angle shifts by artificial structures. IEEE Transactions on Geoscience and Remote Sensing, 45(11):3417-3425[DOI:10.1109/TGRS. 2007.905973]
-
Kajimoto M and Susaki J. 2013. Urban-area extraction from polarimetric SAR images using polarization orientation angle. Geoscience and Remote Sensing Letters, 10(2):337-341[DOI:10.1109/LGRS.2012.2207085]
-
Kimura H, Papathanassiou K P and Hajnsek I. 2005. Polarization orientation effects in urban areas on SAR data//Proceedings of Geoscience and Remote Sensing Symposium. Seoul, Korea:IEEE:7:4863-4867[DOI 10.1109/IGARSS.2005.1526763]
-
Kira K and Rendell L A. 1992. The feature selection problem:Traditional methods and a new algorithm//Proceedings of the tenth national conference on Artificial intelligence.[s.l.], AAAI:2:129-134
-
Kumar S and Sangwan R S. 2013. Urban growth, land use changes and its impact on cityscape in sonipat city using remote sensing and GIS techniques, Haryana, India. International Journal of Advanced Remote Sensing and GIS, 2(1):326-332
-
Lee J S and Ainsworth T L. 2011. The effect of orientation angle compensation on coherency matrix and polarimetric target decompositions. IEEE Transactions on Geoscience and Remote Sensing, 49(1):53-64[DOI:10.1109/TGRS.2010.2048333]
-
Lee J S, Krogager E, Ainsworth T L and Boerner W M. 2006. Polarimetric analysis of radar signature of a manmade structure. IEEE Geoscience and Remote Sensing Letters, 3(4):555-559[DOI:10.1109/LGRS. 2006.879564]
-
Lee J S and Pottier E. 2009. Polarimetric Radar Imaging:From Basics to Applications. New York:CRC Press:89-385
-
Li Q, Li L and Zhao X. 2005. Urban change detection using Landsat TM Imagery. Geometrics and Information Science of Wuhan University, 30(4):351-354(李全, 李霖, 赵曦. 2005. 基于Landsat TM影像的城市变化检测研究. 武汉大学学报(信息科学版), 30(4):351-354)
-
Marpu P R, Chen K S, Chu C Y and Benediktsson J A. 2011. Spectral-spatial classification of polarimetric SAR data using morphological profiles//Proceedings of 3rd International Asia-Pacific Conference on Synthetic Aperture Radar. Seoul:IEEE:1-3
-
Samat A, Gamba P, Du P J, Luo J Q. 2015. Active extreme learning machines for quad-polarimetric SAR imagery classification. International Journal of Applied Earth Observation and Geoinformation, 35:305-319.[DOI:10.1016/j. jag.2014.09.019]
-
Shi L, Li P X, Yang J and Zhao L L. 2012. Refined land-cover classification algorithm in airborne POLSAR system. Journal of Remote Sensing, 16(6):1130-1144(史磊, 李平湘, 杨杰, 赵伶俐. 2012. 机载极化SAR地物类型逐步精细分类研究. 遥感学报, 16(6):1130-1144)
-
Sun Y and Li J. 2006. Iterative Relief for feature weighting//Proceedings of the 23rd International Conference on Machine Learning. New York:ACM:913-920
-
Tax, D M J and Duin R P W. 2004. Support vector data description. Machine Learning, 54(1), 45-66[DOI:10.1023/B:MACH. 0000008084.60811.49]
-
Touzi R. 2007. Target scattering decomposition in terms of roll-invariant target parameters. IEEE Transactions on Geoscience and Remote Sensing, 45(1):73-84[DOI:10.1109/TGRS.2006.886176]
-
Wu W J, Guo H D and Li X W. 2015. Urban area SAR Image Man-Made target extraction based on the product model and the time-frequency analysis. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 8(3):943-952[DOI:10.1109/JSTARS. 2014.2371064]
-
Yamaguchi Y, Sato A, Boerner W M, Sato R and Yamada H. 2011. Four-component scattering power decomposition with rotation of coherency matrix. IEEE Transactions on Geoscience and Remote Sensing, 49(6):2251-2258.[DOI:10.1109/TGRS.2010.2099124]
-
Yeh A G O and Qi Z X. 2015. Short-interval monitoring of land use and land cover change using a time series of RADARSAT-2 Polarimetric SAR images//Kwan M P, Richardson D, Wang D G and Zhou C H, eds. Space-Time Integration in Geography and GIScience. Netherlands:Springer:353-371[DOI:10.1007/978-94-017-9205-9_19]
-
Zeng C Q, Zhou Y, Wang S X and Yang M. 2009. Method of population density estimation based on the night light data. Journal of Remote Sensing, 13(S1):314-321(曾垂卿, 周艺, 王世新, 杨眉. 2009. 基于夜间灯光数据的人口密度遥感定量反演方法. 遥感学报, 13(S1):314-321[DOI:10.11834/jrs.20090044])
-
Zha Y, Gao J and Ni S. 2003. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. International Journal of Remote Sensing, 24(3):583-594.[DOI:10.1080/01431160304987]
-
Zhang L, Li X W and Guo H D. 2010. Effect of aspect angle normalized PolSAR data on urban building detection. Canadian Journal of Remote Sensing, 36(3):276-286
-
Zhang Y Z, Zhang H S and Lin H. 2014. Improving the impervious surface estimation with combined use of optical and SAR remote sensing images. Remote Sensing of Environment, 141:155-167
-
Zhou B, He H S, Nigh T A and Schulz J H. 2012. Mapping and analyzing change of impervious surface for two decades using multi-temporal Landsat imagery in Missouri. International Journal of Applied Earth Observation and Geoinformation, 18:195-206[DOI:10.1016/j.jag.2012.02.003]
-
Zhu J W, Qiu X L and Lei B. 2014. New SAR image interpretation method of aircraft based on joint time-frequency analysis. Journal of Electronics(China), 31(4):325-333


