|
|


|
收稿日期: 2015-03-25; 修订日期: 2015-10-25;
优先数字出版日期: 2015-11-02
基金项目: 国家自然科学基金(编号:41301444);北京高等学校"青年英才计划"
第一作者简介: 孙佩军(1989-), 男, 博士研究生, 从事农业统计遥感研究。E-mail: sunpeijun@mail.bnu.edu.cn
通信作者简介: 张锦水(1978-), 男, 副教授, 研究方向为资源与环境遥感。E-mail: zhangjs@bnu.edu.cn
中图分类号: TP79
文献标识码: A
文章编号: 1007-4619(2016)02-0328-16
|
摘要
传统变化检测手段进行水稻遥感识别受“云污染”和影像间配准误差导致的变化检测误差累积及“椒盐”现象的影响,水稻遥感识别精度低。本文提出时空融合模型(Temporal-Spatial-Fusion Model, TSFM)进行水稻遥感识别,旨在综合像元在时间、空间维度上的信息定义像元的水稻时空归属度,根据时空归属度划分阈值提取水稻。实验结果表明:在不同窗口尺度下,TSFM在整体和“云污染”区域对水稻提取均达到了较高精度。当窗口尺度为3 × 3时,水稻提取的用户精度、制图精度和总体精度分别达到93.4%、83.5%和87.9%。在不同窗口尺度下水稻提取的用户精度、制图精度、总体精度均高于分类后比较PCC(Post-Classification Comparison)和多数投票法(Majority Voting, MV);在“云污染”区域,水稻识别总体精度均在92.0%以上,水稻制图精度比PCC、MV分别至少提高了14.0%、7.6%。有效地解决了传统变化检测作物遥感识别存在的误差累积问题,在一定程度上避免了“云污染”和“椒盐”现象对识别结果的影响。另外,初步探讨了TSFM水稻提取精度与景观特征关系,发现在景观规整区域适宜采用较小的窗口,在破碎区域适宜采用较大的窗口。该方法的成功实施,为大范围开展秋粮作物遥感识别,消除“云”影响进行了前期实验探讨。
关键词
遥感识别, 时空归属度, 变化检测, 景观特征, 分类精度, 水稻
Abstract
The change detection method is extensively used in the extraction of paddy rice using remote sensing images. However, the precision of paddy rice classification is reduced by “cloud contamination” and “salt and pepper.” “Cloud contamination” occurs frequently in paddy rice planting areas during the autumn season. The images obtained by using the change detection method to extract paddy information lead to missing spectral information and constraints in using change detection. “Salt and pepper” occurs by misregistration, and a variety of errors are encountered in the classification, which yields false information and results in the accumulation of deviation during extraction. However, these two crucial issues have a detrimental effect on the ability to extract paddy accurately, which must be solved to increase the accuracy of extraction. In this study, an innovative model called temporal–spatial–fusion model (TSFM) is proposed to reduce the effect of these noises.
In this model, we built a temporal–spatial–belonging degree algorithm. First, the TSFM calculated the attribution probability of the target pixel by using the spectral information of neighborhood pixels in spatial dimensions. We searched the classification of each thematic map in a critical period of paddy growing with a window and calculated the belonging degree in spatial dimensions. Second, we computed the mean of the belonging degree of pixels in the same geospatial location by using the time series of remote sensing images in time dimensions, which is the temporal–spatial–belonging degree of the pixel. Third, the paddy rice was extracted by defining the threshold derived by using the change magnitude threshold determination method.
Post-classification comparison (PCC) and majority voting (MV) were introduced to map the paddy rice and to validate the proposed algorithm. We assessed the precision of the result of paddy rice in the entire study area and the “cloud contamination” area with confusion matrix method. The degree of landscape fragmentation was used to assess the effect of the mixture of spectral information of crop, which should be analyzed. Thus, two districts were selected as study areas with different degrees of landscape fragmentation based on a visual appraisal of the study area. The accuracy was compared, and the applicability and difference using TSFM were analyzed in these two regions.
Experimental results show that the precision of the user, accuracy of the producer, and overall accuracy of the TSFM with 3 × 3 window size are 93.4%, 83.5%, and 87.9%,respectively. Compared with the traditional change detection method of PCC, these precisions are higher than 2.3%, 12.3%, and 9.3%. When different window sizes are used to identify the paddy rice, these precisions are higher than that of the PCC results. The overall accuracy is better than 92.0%,and the omission errors of the PCC and MV are reduced by 14.0% and 7.6%, respectively, in the area of cloud contamination. The results of classification using TSFM with different window sizes in the regular and fragmented regions varied, providing a foundation for the use of TSFM in different landscapes.
Experimental results showed that the TSFM effectively solved the problem of errors from “cloud contamination” and “salt and pepper.”The TSFM provides a new and potentially effective method for paddy rice mapping based on change detection. In the future, we will attempt to apply this method to a large area in China with fragmented and complex landscape.
Key words
identification, temporal-spatial-belonging degree, change detection, landscape features, classification accuracy, paddy rice
1 引 言
水稻是全球重要的粮食资源,其种植面积约占全球作物种植面积的11%(Maclean等,2002)。及时、准确监测水稻种植面积、生长情况不仅对于水资源管理和温室气体排放估算至关重要(Xiao等,2002),对于制定粮食政策、社会稳定及经济发展也具有重要的意义(黄敬峰等,2013;邬明权等,2010)。
遥感具有丰富的时空信息,是进行作物种植面积调查的有效手段(Hatfield等,2008;马丽等,2008)。针对水稻遥感分类识别主要包含两大类方法:单时相遥感影像识别和多时相变化检测方法。单时相遥感影像识别方法主要是通过水稻关键生长期的单期影像的地物光谱信息计算相关指标进行水稻提取。如:通过计算叶面积指数LAI和构建植被指数生物量反演模型,进行水稻监测(李卫国和李花,2010)。由于同期种植作物(玉米、大豆、棉花等)较多,种植结构复杂,多种作物易与水稻相混,造成单一时期遥感影像上存在“异物同谱”的现象,对于水稻识别影响很大。多时相变化检测方法能够充分利用多期遥感影像有效刻画地物在不同时期的表现特征,被广泛应用于土地利用与土地覆盖分类、景观变化检测、作物遥感识别等方面(Singh,1989;Lu等,2004)。对于作物遥感识别而言,变化检测手段能够充分利用作物不同生长期的物候特征在遥感影像上呈现出显著的光谱差异进行作物的识别(俞军和Ranneby,2007;朱爽等,2014)。目前,多时相变化检测识别方法主要有代数法(Algebra)、转换法(Transformation)、分类法(Classification)、高级模型法(Advanced model)等(Lu等,2004)。代数法与转换法都存在难以确定合适阈值进行分类的问题。分类法需要事先获取合适的训练样本输入检测模块(柳思聪等,2011)。大量高质量的训练样本对于分类至关重要,但是往往难以获得。因此,这类方法的分类结果精度难以保证,最后导致遥感识别的不确定性和误差较大。高级模型法通过建模将影像的反射率转换为一定的生物物理参数进行变化信息的获取。它除了在建模方面存在较大难度外,对于影像质量的要求也比较高。这些已有的变化检测分类方法基于影像光谱信息进行计算,影像上“云污染”(cloud contamination(Cheng等,2014))问题会导致变化检测分类识别不确定性和误差增大,加之“云污染”的普遍存在性,致使这些方法的应用受到一定的限制。另外,多期影像配准误差也是一个不容忽视的因素,它会造成“伪”变化信息,导致识别结果中存在“椒盐现象”,降低了识别精度。
已有研究表明,两个普遍存在的问题是影响变化检测水稻识别精度的关键:(1)对影像质量的要求较为苛刻,一般需要无云图像才能够进行准确识别:变化检测需要获取水稻生长关键期的遥感影像,但水稻生长处于云雨天气较多的夏秋季,很难保证获得无云的遥感影像。这种“云污染”现象导致地物光谱信息缺失或受到不同程度的影响,限制了变化检测方法进行水稻遥感识别的适用性。分析遥感影像“云污染”的特点,可以发现其多以“团簇”状分布,不同时期云在遥感影像的位置是随机的。因此可以提出一个假设:从时间维度上,对于一个像元总会找到在至少一个时期没有受到“云污染”的影响,这是本文利用多期影像进行水稻识别的基础。(2)“椒盐”(salt and pepper)现象(Bischof等,1992):有3种情况会导致“椒盐”现象产生。一是作物的混种;二是各期影像之间存在位置误差(Shi和Hao,2014),相对位置的偏差导致多期影像分类结果像元位置存在偏差,产生变化检测的误差累积,降低识别精度;三是多时相分类结果的变化检测方法存在影像分类误差。不同时相的作物光谱差异以及光谱复杂程度不同,造成单期影像分类不准确,导致“椒盐”现象产生。有可能为变化检测提供错误的类别信息,导致像元识别误差累积,影响了像元变化方向的确定。解决后两种情况造成的“椒盐”现象成为提高作物遥感识别精度的关键问题。
为解决上述问题,本文提出时空融合模型(Temporal-Spatial-Fusion Model,TSFM)进行水稻的遥感识别,分别在空间维度基于像元光谱信息定义像元空间归属度、时间维度上基于多期影像在同一像元空间位置定义空间归属度的均值作为该位置像元的时空归属度。利用TSFM进行水稻的提取,旨在降低“云污染”及配准误差对水稻遥感识别的影响。
2 水稻时空融合模型
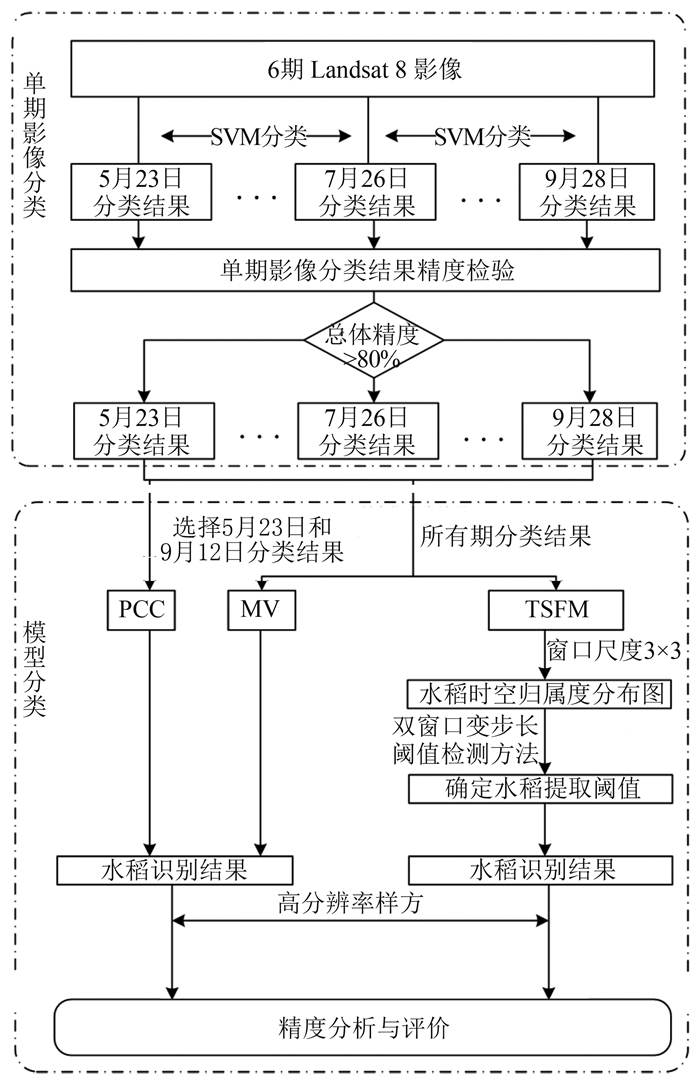
图 1是在水稻生长季过程中,TSFM实现的示意过程。TSFM选取水稻不同生长期的遥感影像作为数据源,分别对各期影像进行分类,得到水稻各期内影像的分类结果(如图 1,播种期Ⅰ、拔节期Ⅱ、灌浆期Ⅲ、收获期Ⅳ)。在空间尺度上设定一定尺寸窗口计算空间归属度(如图 1中窗口所示),计算窗口内水稻像元出现的比例,赋值给中心像元,作为其空间归属度,图 1中$\mathop P\nolimits_{ij}^1 $、$\mathop P\nolimits_{ij}^2 $、$\mathop P\nolimits_{ij}^3 $、$\mathop P\nolimits_{ij}^4 $为对应生长期的像元空间归属度。在时间尺度上,以相同空间位置处像元归属度的均值作为该位置处的像元时空归属度Pij。具体实现流程如图 2所示。



(1)单期影像分类
获取水稻关键生长期的时间序列影像数据,对影像进行分类,提取水稻,检验分类精度达到80%以上。针对每一期影像,“云污染”像元定义为云及云阴影所覆盖的像元。其中,水体和阴影的光谱信息难以从光谱上区分开,二者在分类的时候被划分为一类。
(2)水稻时空归属度定义
空间维度的像元归属度定义为:窗口内单期影像分类结果图中属于水稻的像元的总个数$\mathop n\nolimits_{ij}^t $与窗口内所有像元的总个数Q的比值(其中Q = m × m,m为窗口大小)。这里“云污染”像元作为无效值不参与归属度的运算。则水稻空间归属度计算过程如下:
在第t期影像上,建立m × m像元窗口,遍历整幅分类专题图像,统计搜索窗口内属于水稻的像元个数$\mathop n\nolimits_{ij}^t $,则中心像元(i,j)水稻空间归属度为$\mathop P\nolimits_{ij}^t $(见式(1))。遍历整幅图像,获得各期影像潜在水稻像元空间归属度。
$ P_{ij}^t = n_{ij}^t/Q \text{,} \quad(t = 1\text{,}2\text{,} \cdot \cdot \cdot \text{,}L)$ (1)
式中,t为第t期遥感影像;i为遥感影像第i行的像元;j为遥感影像上的第j列像元;$\mathop P\nolimits_{ij}^t $为第t期影像中像元(i,j)的空间归属度;$\mathop n\nolimits_{ij}^t $为第t期影像上像元(i,j)为中心像元时窗口内属于水稻的像元个数;Q为窗口内像元总个数;L为第L期影像(其中不包含被“云污染”的影像)。
时间维度的像元时空归属度定义为:时间序列影像上同一空间位置处像元(i,j)空间归属度的均值。
求取同一空间位置处的像元空间归属度的均值(式(2)),若第t期影像上像元(i,j)被“云污染”,则其不参与时空归属度的计算。
${P_{ij}} = \frac{{\displaystyle\sum\limits_{i = 1}^N {\mathop P\nolimits_{ij}^t } }}{N}$ (2)
式中,Pij为时空归属度;N为像元(i,j)参与计算的影像数量。
3 研究区与数据
3.1 研究区概况
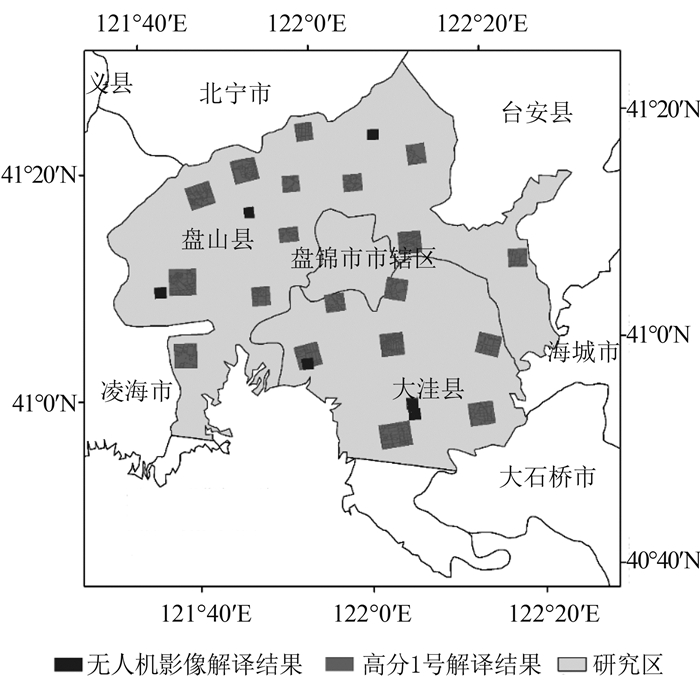
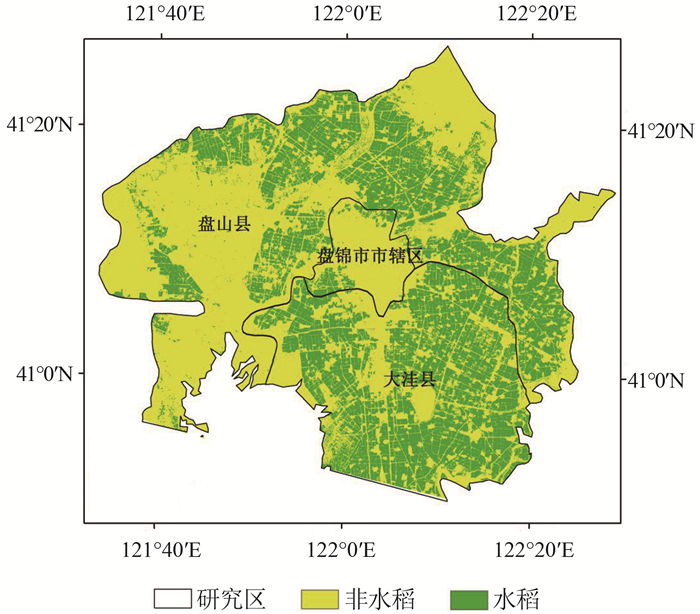
研究区位于辽宁省西部盘锦市市辖区、盘山县、大洼县3个市县内,总面积约为2882.1 km2(121°3′—122°8′E,40°0′—40°6′N)(见图 3),处于中纬度地区,属于温带大陆性季风气候区。水稻种植区域地势平缓,地块较为规整。境内雨热同季,日照丰富,积温较高,春秋季短,四季分明,是水稻的主要产区。该地区水稻4月上旬播种,5月上温较高,春秋季短,四季分明,是水稻的主要产区。该地区水稻4月上旬播种,5月上旬出苗,6月至9月上旬水稻返青、分蘖、抽穗、乳熟,9月中下旬至10月上旬为成熟收获期。云覆盖在水稻生长期间经常出现。
3.2 数据与标准化处理
3.2.1 Landsat 8数据
本研究共获取6期Landsat 8影像(分辨率30 m),数据投影坐标系为UTM-WGS84 Zone 51 N。具体的数据内容见表 1。考虑到光谱在一期影像上大气是具有均一性,对影像分类影响不大,因此不需要进行大气校正(Kawata等,1990; Song,2001)。Landsat 8影像做过基于地形数据的几何精校正,因此可直接用于本文研究。
表 1 Landsat 8实验数据
Table 1 Landsat 8 experiment data
| 数据类型 | Landsat 8 | |||||
| 传感器 | OLI (Operational Land Imager) | |||||
| 行/列号 | 120/31 | |||||
| 获取时间 | 05/23/2013 | 06/08/2013 | 07/26/2013 | 08/11/2013 | 09/12/2013 | 09/28/2013 |
| 水稻生长期 | 播种期 | 拔节期 | 灌浆期 | 灌浆期 | 灌浆期 | 收获期 |
| 数据质量 | 无云 | 无云 | 少量云 | 少量云 | 少量云 | 大量云 |
| “云污染”区域分析 | -- | -- | 集中在研究区中部; 少量集中于西南部 |
集中在研究区西南部; 零星分布在研究区东侧 |
集中在研 究区中部 |
集中在研究 区东南一侧 |
| 注:Landsat 8数据从USGS网站下载(http://earthexplorer.usgs.gov/)。 | ||||||
3.2.2 高分辨率样方
为检验TSFM的准确性和适用性,利用无人机影像和高分一号GF-1多光谱影像评价该模型的水稻识别精度。两种验证数据以Landsat 8影像数据为基准进行相对几何校正,误差低于0.5个TM像元。(1)无人机航拍影像,2013-08-10—2013-08-12日在研究区内拍摄6个无人机样方,分辨率为10 cm,面积约20.8 km2;(2)2013年8月10日GF-1的8 m多光谱影像。为补充无人机样方数据量,利用2013年8月10日GF-1的8 m多光谱影像采样获取19个样方,总面积约232.9 km2(见图 3)。为保证高分辨率样方目视解译精度,在样方区域进行了地面调查,获取738个地面采样点及其对应的地物类型。
对无人机样方和GF-1影像样方进行目视解译。以地物类型面积占优的准则将解译样方转为30 m多分辨率的栅格数据。样方栅格数据重分类后的地物类型为水稻(152846个像元)、非水稻(129018个像元)。
4 实验流程
TSFM主要包括:支撑向量机SVM(Support Vector Machine)分类、分类结果精度评价、水稻遥感识别、水稻提取精度分析与评价。具体流程见图 4。
4.1 遥感影像分类
SVM是一种基于统计学习和结构风险最小化理论的分类器(Cortes和Vapnik,1995)。该分类器可以使类间间隔最大化,保证分类精度(Huang等,2002; 张伐伐等,2012)。因此实验针对6期影像进行SVM分类,识别各类地物信息。野外调查的地面采样点用于SVM分类,无人机和GF-1高分辨率样方解译结果用于分类结果精度评价。由于水体和阴影的光谱信息比较接近,划分为一类;考虑到水稻在整个生长季有泡田期存在,可以有效地区分开两种不同的作物,因此在生长季的时候,可以将不同的绿色植物定义为一类。总体的分类体系定义为水稻、芦苇、水体、云、云阴影、裸地、树和其他植被。不同时期影像因作物生长情况不同分类体系会有所差异。采用SVM分类方法进行影像初步分类,结果见表 2。采用混淆矩阵方法对各期影像分类结果进行精度评价。保证每期影像分类总体精度达到80%以上。
表 2 影像分类体系
Table 2 The scheme of image classification
| 类别 | 时相 | |||||
| 5/23 | 6/8 | 7/26 | 8/11 | 9/12 | 9/28 | |
| 水稻 | -- | -- | √ | √ | √ | √ |
| 树 | √ | √ | √ | √ | √ | √ |
| 水体(混有 | √ | √ | -- | -- | -- | -- |
| 水田) | ||||||
| 水体(混有 | -- | -- | √ | √ | √ | √ |
| 云的阴影) | ||||||
| 居民地 | √ | √ | √ | √ | √ | √ |
| 裸地 | √ | √ | √ | √ | √ | √ |
| 云 | -- | -- | √ | √ | √ | √ |
| 芦苇 | √ | √ | √ | √ | √ | √ |
| 其他 | √ | √ | √ | √ | √ | √ |
| 注:√表示分类结果中有该类别,--表示没有该类别。 | ||||||
4.2 时空融合模型
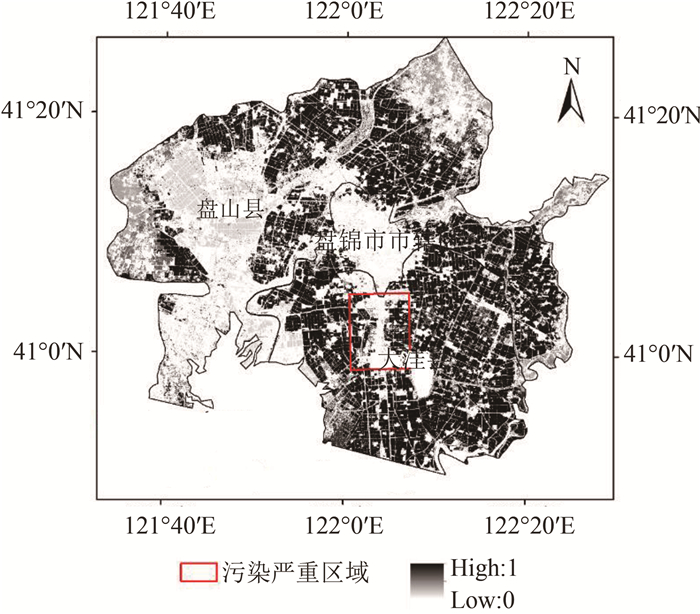
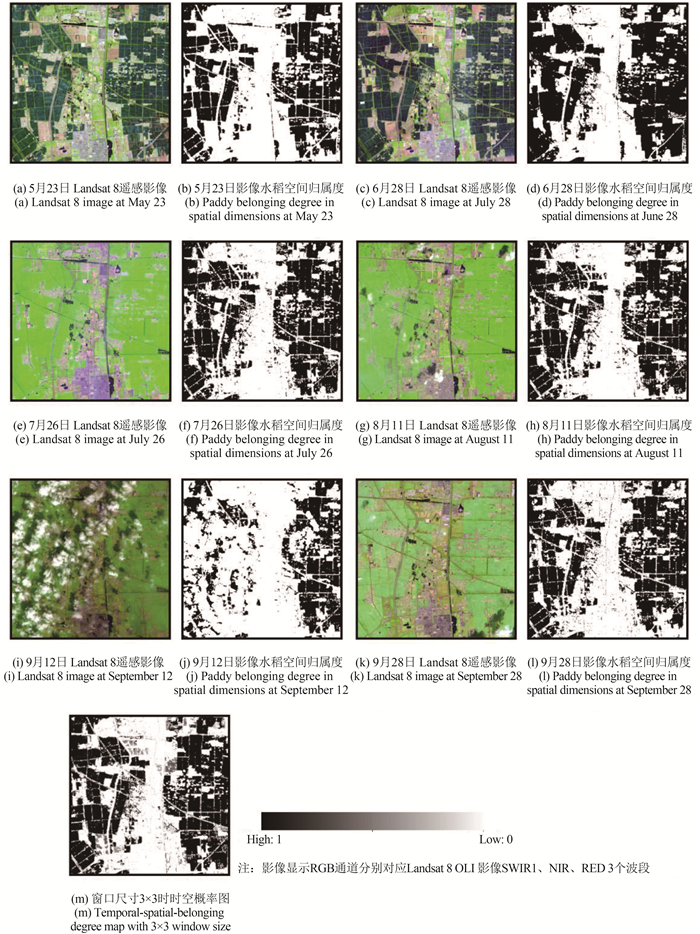
根据式(2),计算得到水稻像元的时空归属度分布图(图 5)。为直观表达TSFM模型在“云污染”严重区域的时空归属度计算过程及结果,选取图 5红框内 “云污染”较严重区域进行分析。图 6为云污染区域每一时期像元空间归属度以及最终生成的水稻时空归属度图,其中各景影像右侧的图(灰度图)为该期影像对应计算出的水稻像元空间归属度图。从图 6中可以看出,9月12日影像受到云的污染,云下像元归属于水稻的可能性基本为0,该值将不参与TSFM水稻时空归属度的计算;从9月12日的像元空间归属度图可以看出,在“云污染”区域地物信息损失严重。3 × 3窗口尺度下像元时空归属度结果中不同地块的边界区分的较好。关于“云污染”对水稻识别的精度及效果在5.2节中详细分析。
4.3 水稻的提取
为了准确提取水稻,本文选择双窗口变步长阈值搜寻方法确定水稻提取阈值。该方法的基本假设是:如果包含不同变化类型的典型变化训练样区,确定某一阈值使得变化检测精度达到最大,则该阈值在整景图像上亦可能使检测精度达到最高(陈晋等,2001)。在本研究中,阈值为0.68时,检测精度达到最高(95.06%),因此水稻时空归属度阈值为0.68。表 3为双窗口变步长阈值搜寻计算过程,包括阈值搜寻范围、步长及对应整景图像的检测精度。
表 3 TSFM在3 × 3窗口尺度下双窗口变步长阈值搜寻
Table 3 The result of double-windows flexible pace searching with TSFM (3 × 3 window size)
| 阈值范围0.9—0 步长0.1 |
阈值范围0.8—0.6 步长0.02 |
阈值范围0.7—0.65 步长0.01 |
|||||
| 阈值 | 检测 成功率/% |
阈值 | 检测 成功率/% |
阈值 | 检测 成功率/% |
||
| 0.90 | 69.41 | 0.80 | 85.52 | 0.70 | 94.55 | ||
| 0.80 | 85.52 | 0.78 | 87.64 | 0.69 | 95.04 | ||
| 0.70 | 94.55 | 0.76 | 89.03 | 0.68 | 95.06 | ||
| 0.60 | 92.10 | 0.74 | 90.29 | 0.67 | 95.02 | ||
| 0.50 | 86.42 | 0.72 | 91.88 | 0.66 | 94.22 | ||
| 0.40 | 83.18 | 0.70 | 94.55 | -- | -- | ||
| 0.30 | 81.47 | 0.68 | 95.06 | -- | -- | ||
| 0.20 | 80.22 | 0.66 | 94.22 | -- | -- | ||
| 0.10 | 70.41 | 0.64 | 93.58 | -- | -- | ||
| 0 | 68.33 | 0.62 | 93.03 | -- | -- | ||
| -- | -- | 0.60 | 92.10 | -- | -- | ||
考虑到水稻的生长初期(泡田积水仍存在),稻田与水体难以从影像上区分。因此影像初步分类结果中,水体像元实际上包含水稻。在计算空间归属度时为了不丢失水稻信息,将生长初期的影像分类结果中水体作为目标像元水稻。生长初期过后,水稻与水体易区分,计算水稻空间归属度时水体将不再是目标像元,此时水体像元归属于水稻的概率为0。按照TSFM计算方法,对这些像元空间归属度求均值,得到其为水稻的时空归属度值为1。这与实际情况不符。对此,需要剔除分类结果中混入的水体像元。具体方法:以水体为目标类采用TSFM计算像元属于水体的时空归属度为100%的像元可确定为水体。然后提取水体的空间分布范围,在分类结果中剔除水体像元,获得水稻的空间分布(见图 7)。
5 结果分析
5.1 精度评价
为验证TSFM的适用性,选取分类后比较变化检测法PCC(Post-Classification Comparison)(Singh,1989)和多数投票法MV(Majority Voting)(Louisa和Suen,1997;吴春花等,2012)进行比较分析。根据实地调研的结果,该地区水田种植作物类型为水稻,没有出现物候特征变化信息与其相同的作物。PCC方法根据水稻的物候特征,选取5月23号和9月12日两期Landsat 8 OLI影像进行PCC变化检测,提取水稻的分布。其中,5月23日像元识别为水体,9月12日对应像元类别为植被,则可以确定像元类型为水稻。MV方法通过对单期影像分类结果进行投票,确定像元归属类别,提取水稻。实验6期影像分类结果均参与水稻提取,“云污染”区域在投票时被认定为非水稻。5月23日和6月8日的影像水田认为是水稻种植区域,其他4期植被区域被认定为水稻。当出现多个类别投票结果相同时,随机选择一个结果作为最终结果(吴春花等,2012)。
以无人机和GF-1解译的水稻为参考值,构建混淆矩阵,对TSFM、PCC和MV三种方法进行精度评价,评价结果见表 4。
表 4 试验结果
Table 4 The accuracy value of experiment
| 用户精度 | 制图精度 | 总体精度 | |
| TSFM | 93.4 | 83.5 | 87.9 |
| PCC | 91.4 | 71.2 | 78.6 |
| MV | 90.1 | 82.1 | 85.7 |
TSFM分类结果的用户精度、制图精度、总体精度较PCC方法分别提高2.0%、12.3%和9.3%,较MV法分别提高了2.3%、1.4%和2.2%。TSFM对于水稻的识别精度达到较高的准确率,制图精度比PCC提高了12.3%。相对于MV结果,TSFM总体精度较好,主要原因可能是在投票时多个类别投票结果相同时,采用了随机选择的方式确定作物类型,降低了识别精度;另外,MV对于单期分类的误差和由于配准造成的误差的处理效果可能比TSFM差。TSFM用户精度和制图精度均高于MV,说明TSFM采用对时间维度上归属度求均值能够一定程度上降低分类的不确定性。总的来说,TSFM分类方法能够充分利用时间维度和空间维度的信息,有效地避免“云污染”影响,同时一定程度上消除单期影像分类误差对结果的影响,保证水稻识别精度。而PCC 影像受“云污染”影响严重,难以保证有效的光谱信息进行水稻识别,同时单期影像分类存在的误差也会影响其识别精度。另外,在水稻生长初期影像分类结果水体与阴影没有区分开,如果泡田期的水稻被阴影覆盖,在生长期过后这些区域被“云污染”,则PCC方法不能获得有效的水稻生长变化信息,从而降低PCC水稻识别精度。
5.2 子区对比分析
为了进一步分析TSFM在“云污染”区域的分类效果,对6期影像上的“云污染”区域(指影像上云和云的阴影)进行矢量化,测算各期影像被污染的水稻面积。单期影像“云污染”情况见表 5。由表 5可知,9月28日影像受“云污染”最严重,面积约占研究区总面积的45%,其余3期影像受污染面积占研究区总面积的比例在9%以下。利用该矢量化结果,分别对TSFM3 × 3窗口尺度下、PCC及MV的分类结果进行裁剪,获得对应的“云污染”区域的分类结果。
表 5 单期遥感影像“云污染”情况
Table 5 The degree of “cloud contamination” in images
| 2013/05/23 | 2013/06/08 | 2013/07/26 | 2013/08/11 | 2013/09/12 | 2013/09/28 | |
| “云污染”面积/km2 | 0 | 0 | 106.3 | 233.4 | 77.9 | 1297.3 |
| “云污染”面积比例/% | 0 | 0 | 3.7 | 8.1 | 2.7 | 45.0 |
| “云污染”区域主要地物类型 | -- | -- | 芦苇、水稻、 非植被 |
芦苇、水稻、 非植被 |
芦苇、水稻、 非植被 |
水稻、非植被 |
针对各类型分别随机选取100个点进行目视判定,计算分类精度。结果表明,在“云污染”区域,TSFM 3 × 3窗口尺度下分类结果总体精度、用户精度、制图精度分别为95.0%、92.0%和92.4%(PCC对应精度分别为83.5%、95.0%和77.2%;MV对应精度分别为87.0%、88.4%和83.6%)。TSFM识别水稻的制图精度比PCC提高了15.2%,比MV提高了8.8%。原因是PCC和MV除了受到光谱异质性的影响,更主要是受到“云污染”的严重影响。TSFM充分利用时间、空间维度上的像元类别变化信息,对污染区域水稻分布情况进行了较准确的预测,很好地避免了影像被“云污染”导致单期影像上分类结果不准确的问题。
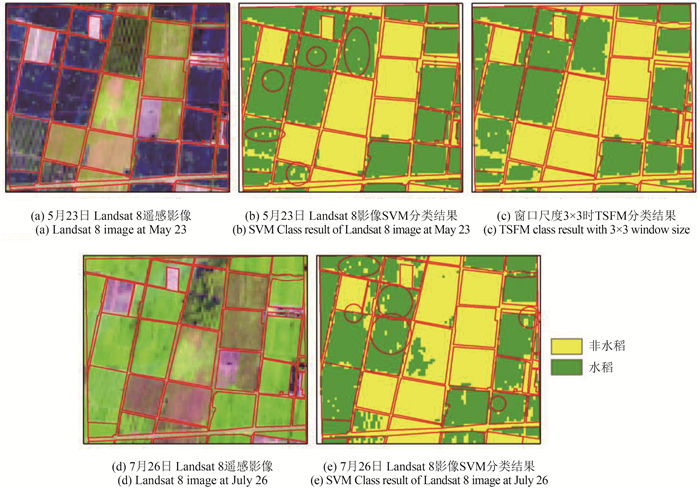
图 8表明,局部区域PCC和MV分类结果中存在“椒盐”现象,TSFM不同窗口尺度下,一定程度上解决了该问题,图中显示RGB通道分别对应Landsat 8 OLI影像的SWIRI、NIR、RED波段。图 9所示为另外选取的5月23日和7月26日两期影像上局部区域的单期分类结果和最终3 × 3窗口尺度下的水稻识别结果,图中“红圈”标记为单期SVM分类结果中的“椒盐”,这类“椒盐”是由于光谱异质性导致的。由图 9可以看出TSFM在3 × 3窗口尺度下的分类结果中“椒盐”现象明显减少。通过TSFM将这种混入的错误减少,降低了分类识别的不确定性,能够提高水稻的识别精度。但是,在种植结构复杂、地块破碎的区域,TSFM会存在将真实混作的少量其他作物作为“椒盐”处理,使得主要作物的遥感识别和面积估算精度会降低。而由于分类不确定性造成的“椒盐”采用TSFM处理,会使得主要作物识别精度提高。二者综合对于总体的分类识别精度效果,难以确定。这也是TSFM的一个局限性。
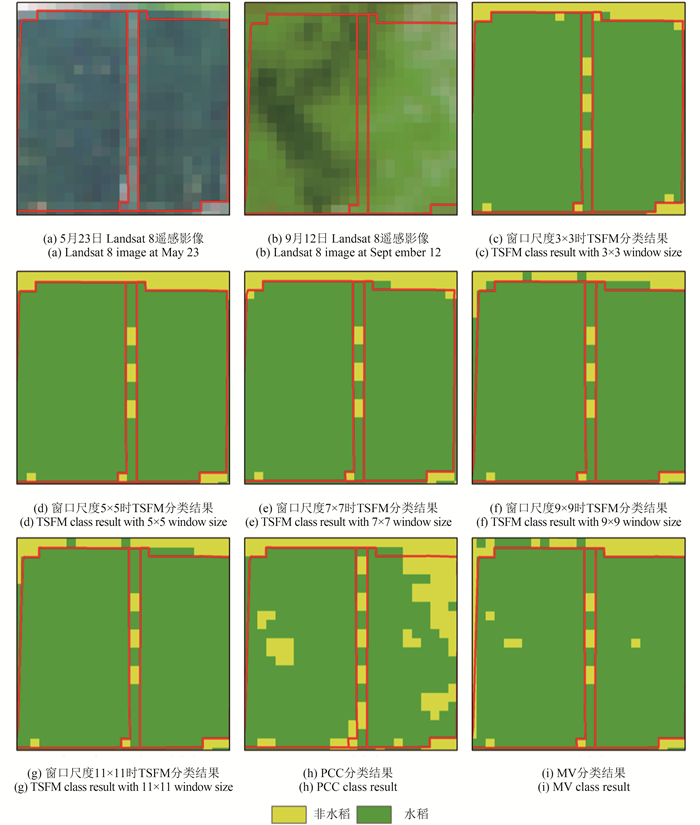
PCC方法中两景影像光谱异质性不同,各期影像基于像元的分类结果存在“椒盐”现象。采用PCC这种识别方法,错误(或误差)会进一步累积,导致最终分类结果“椒盐”现象的增多。MV分类不确定性增大,也会导致“椒盐”现象。TSFM建立像元空间归属度的计算窗口,该窗口通过邻域像元类别信息计算中心像元的空间归属度,降低光谱异质性对中心像元类别判定的影响。另一方面,在时间维度计算像元时空归属度,进一步降低了“椒盐”引起的水稻提取的不确定性。这两种因素是模型能够将“椒盐”现象减少的主要原因。
5.3 窗口尺度对分类结果影响分析
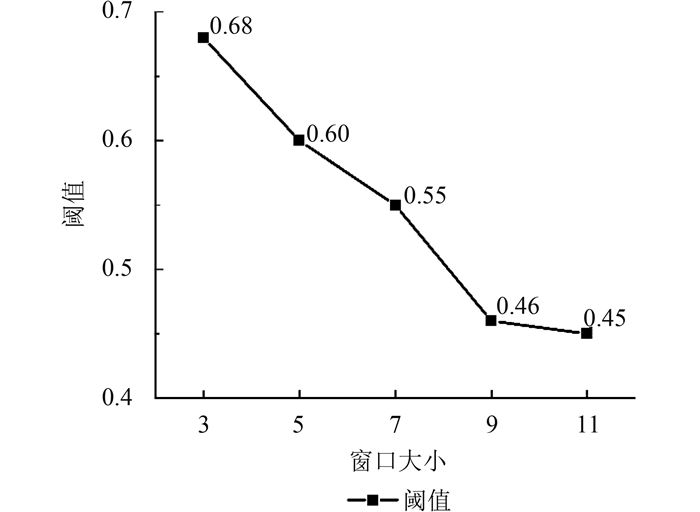
为分析TSFM窗口尺度对分类结果的影响,实验进一步设置窗口尺度分别为5 × 5、7 × 7、9 × 9、11 × 11,获取对应尺度下的水稻时空归属度图。并根据双窗口变步长的阈值确定方法计算提取水稻阈值(图 10),识别水稻与非水稻类。
(1)TSFM窗口尺度对分类精度的影响分析
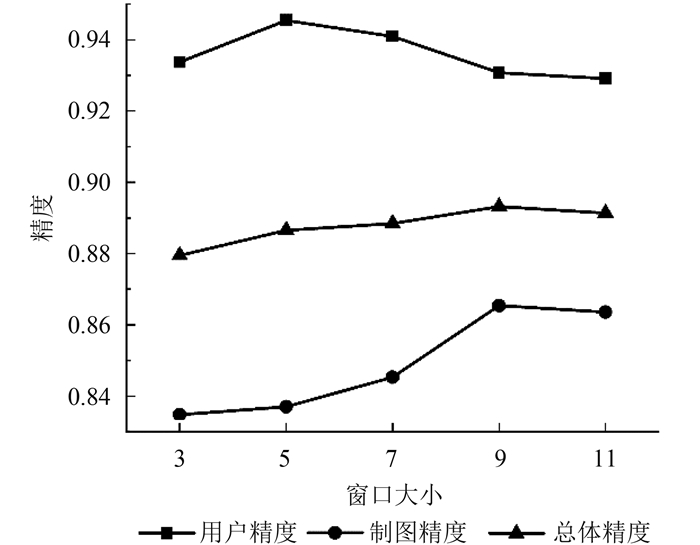
在不同窗口尺度下,TSFM用户精度呈先降低后稳定的趋势,表明水稻被分正确的比率先逐渐降低再趋于稳定。制图精度呈先升高再稳定的变化趋势,表明被正确分为水稻的像元数占地表真实水稻类的比率升高。总体精度呈现逐渐上升的趋势(表 6)。图 11中窗口达到9 × 9或11 × 11时,用户精度与制图精度趋于稳定,并且总体精度达到了89.0%以上,表明在该实验区选择这两种尺度的窗口进行分类较为适宜。
表 6 不同窗口尺度下TSFM分类精度
Table 6 The accuracy of TSFM with different window size
| /% | |||||
| >窗口尺度 | |||||
| 3 × 3 | >5 × 5 | >7 × 7 | >9 × 9 | >11 × 11 | |
| 用户精度 | >93.4 | >94.5 | >94.1 | >93.1 | >92.9 |
| 制图精度 | >83.5 | >83.7 | >84.5 | >86.5 | >86.4 |
| 总体精度 | >87.9 | >88.7 | >88.8 | >89.3 | >89.1 |
(2)TSFM不同窗口尺度下“云污染”区域水稻识别精度分析
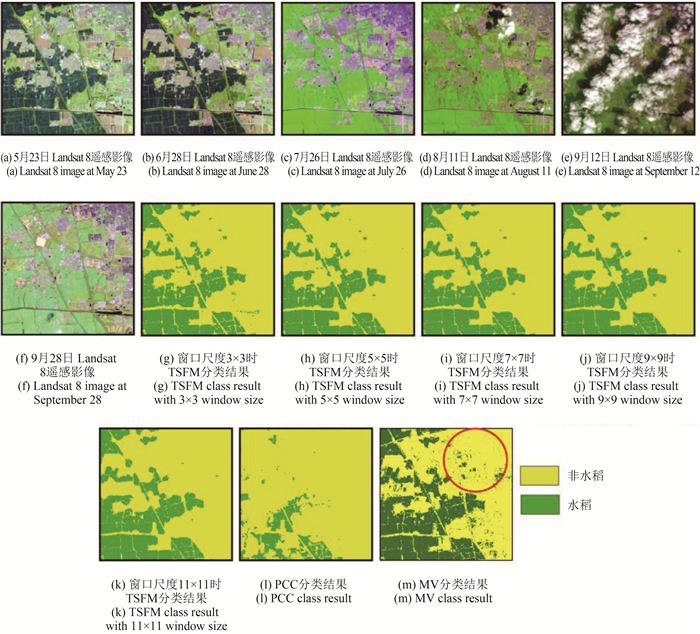
为分析TSFM不同窗口尺度在“云污染”区域的分类精度,实验根据上述“云污染”区域矢量化结果,分别裁剪了不同窗口尺度下的分类结果,获得了对应“云污染”区域的识别结果。采用ENVI5.0 软件中混淆矩阵方法,各类别分别随机选取100个点进行目视判定,计算分类精度,结果见表 7。结果表明,TSFM各窗口尺度下的总体精度均高于92.0%以上(PCC为83.2%,MV为87.0%),用户精度均高于92.0%(PCC为95.0%,MV为88.4%),制图精度均高于91.0%(PCC为77.2%,MV为83.6%)。PCC和MV识别水稻的制图精度比TSFM至少降低了14.0%、7.6%。为直观表达“云污染”区域的分类效果,实验选取图 12所示局部区域对比TSFM与PCC、MV识别水稻的结果,图中显示RGB通道分别对应Landsat 8 OLI 影像的SWIRI、NIR、RED波段。从图 12可以看出,PCC在“云污染”区域对水稻的识别效果非常差,相应的MV比PCC识别效果好。在MV识别结果中“红圈”标记的区域,可以明显看到在非水稻区域错分的情况增多。TSFM总体上分类效果比PCC和MV好。
表 7 “云污染”区域水稻的分类精度
Table 7 The accuracy of TSFM in “cloud contamination”
| 窗口尺度 | |||||||
| 3 × 3 | 5 × 5 | 7 × 7 | 9 × 9 | 11 × 11 | PCC | MV | |
| 用户精度/% | 92.0 | 93.0 | 93.0 | 93.0 | 93.9 | 95.0 | 88.4 |
| 制图精度/% | 92.4 | 93.9 | 94.9 | 91.2 | 92.1 | 77.2 | 83.6 |
| 总体精度/% | 95.0 | 93.5 | 94.0 | 92.0 | 93.5 | 83..5 | 87.0 |
(3)TSFM在不同景观空间格局破碎特征下适用性探讨
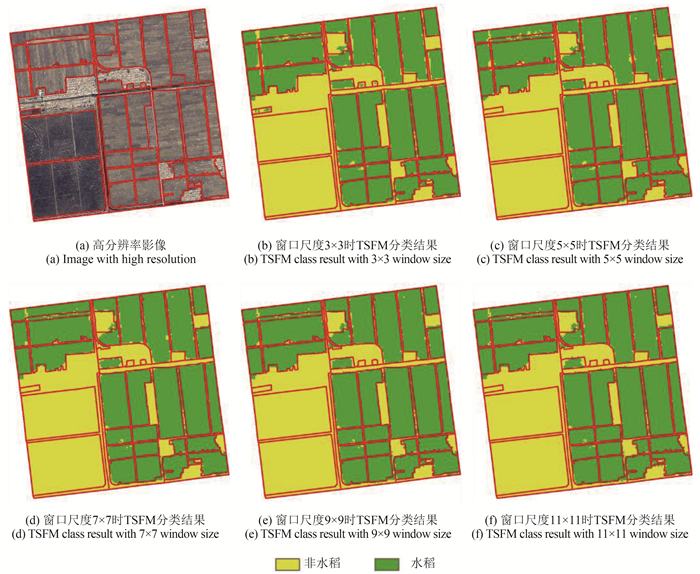
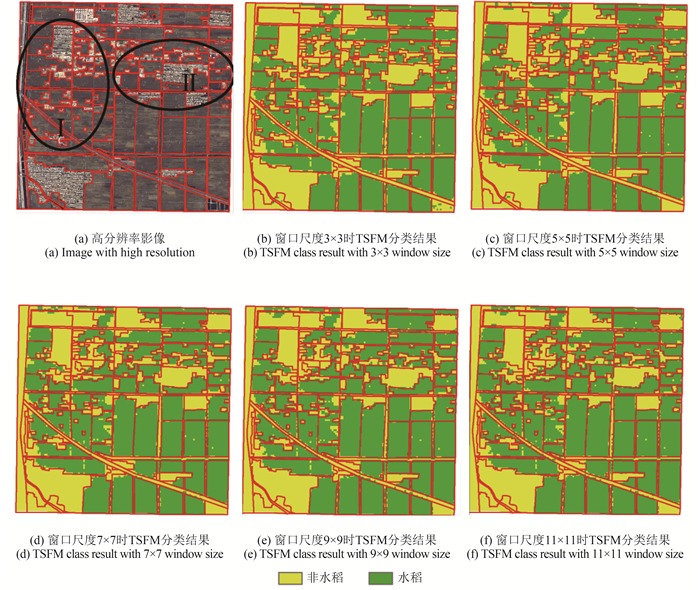
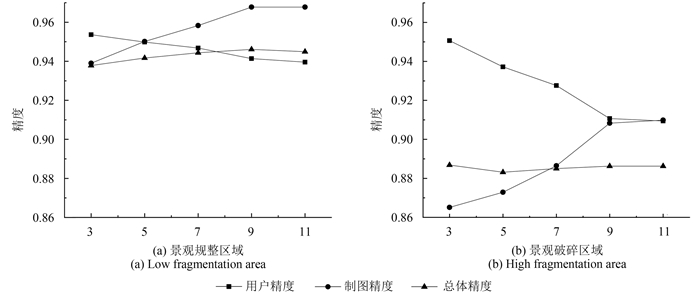
景观空间破碎特征指景观被分割的破碎程度(Griffiths和Mather,2000),不同破碎特征下地物光谱互相影响程度不同(如异物同谱或同谱异物),分类的效果也会受到很大的影响。本实验目视判读确定景观空间破碎程度,选取了研究区内景观规整区域(图 13)与景观破碎区域(图 14),采用TSFM的分类识别结果进行分析。分析图 13中不同窗口尺度下的分类结果与原始影像的差异程度可知景观斑块破碎程度较小的这些区域,分类效果较好。结合原始影像分析图 14不同窗口尺度下的分类结果可知,景观斑块过于破碎区域(图 14中标注的区域Ⅰ、Ⅱ)分类结果差异较大。从分类精度来看,TSFM在景观规整区域,用户精度在95.5%— 93.5%之间,随窗口尺度增大呈下降趋势。制图精度在93.5%—97.0%之间,随窗口尺度增加呈上升趋势。总体精度均达到了93.5%以上,随窗口尺度增加呈先上升后下降趋势。景观破碎区域用户精度在95%—91%之间,制图精度在86%—91%之间,二者随窗口尺度增加的变化趋势与景观规整区域的相同。总体精度则在88%—89%之间,呈先下降再平缓上升的趋势。分析图 15(a)可知,景观规整区域在窗口尺度为5 × 5时用户精度与制图精度几乎相同,都接近95.0%,总体精度达到了94.0%以上。在其他窗口尺度下,制图精度与用户精度差异较大。表明窗口尺度为5 × 5时景观规整区域分类达到较好效果。分析图 15(b)可知,景观破碎区域窗口大小为9 × 9和11 × 11时用户精度和制图精度都接近91.0%,总体精度接近89.0%。结果表明,窗口尺度为9 × 9和11 × 11时景观破碎区域水稻识别分类错入错出都达到较稳定的状态,获得了较好的分类效果。从TSFM模型水稻识别总体的结果来看,随着搜索窗口的增大,对分类总体的精度的提高是有益的。而对于景观破碎区域,为了保证破碎区域地物边界附近像元分类更加准确,需要增加窗口尺度来获得增加邻域像元的信息,减少空间光谱异质性来进行判断。因此TSFM在对景观破碎区域分类时,窗口尺度应当大于景观规整区域较为适宜。
6 结 论
6.1 结论
针对水稻遥感识别时存在的问题,提出TSFM进行水稻遥感识别,保证水稻的识别精度,消除“云污染”的影响,一定程度上解决“椒盐”现象造成误差的问题。得到如下结论:
(1)TSFM进行水稻遥感识别是可行且有效的。该模型可以充分利用中心像元的邻域像元及相邻时相同空间位置上像元的信息判定中心像元的类别。从实验结果看,采用该模型进行水稻遥感分类识别的精度较高。TSFM在窗口尺度为3 × 3时水稻识别用户精度、制图精度和总体精度分别比PCC对应精度高2.0%、12.3%和9.3%,比MV分别高出2.3%、1.4%和2.2%。随着窗口尺度从3 × 3改变至11 × 11,TSFM水稻识别在窗口尺度为11 × 11时用户精度最低(92.9%),窗口尺度为3 × 3时,制图精度(83.5%)和总体精度(87.9)达到最低值。但是比PCC用户精度、制图精度和总体精度分别高出了1.5%、11.5%和9.3%;比MV高出2.8%、1.4%和2.2%。TSFM进行水稻遥感识别具有一定的优势。
(2)TSFM在水稻遥感识别时较好的避免了“云污染”和“椒盐”现象的误差累积问题。在“云污染”区域水稻识别总体精度均达到了92.0%以上。用户精度和制图精度均分别在92.0%和91.0%以上。水稻的制图精度比PCC和MV分别至少提高了14.0%和7.6%。从TSFM识别结果看,一定程度上降低了“椒盐”现象的出现。因此,TSFM能够在保证识别精度的前提下,有效避免“云污染”和“椒盐”现象。
(3)TSFM不同窗口尺度在景观特征规整区域和特破碎区域下的适用性不同。不同景观特征下,作物空间分布异质性存在差异。TSFM不同窗口尺度,受空间异质性影响不同。因而在不同景观特征下的分类识别精度不同。根据实验结果,建议在景观特征破碎区域采用较大的窗口尺度,在景观规整区域采用较小的窗口尺度。
6.2 讨论
本研究仍存在一些问题有待进一步解决。
(1)TSFM在种植结构比较复杂、地块比较破碎的南方,对于“椒盐”代表少量混作作物的情况还需要进一步分析。另外,如何定量化的表达景观空间特征,或田块空间特征与TSFM的作物识别精度的关系也需继续探讨。
(2)TSFM在进行多目标识别时,不同作物边界处像元的归属问题需进一步研究。另外,需要深入分析多目标作物识别时的不确定性。
(3)本文研究中影像“云污染”的范围仅限于云及云的阴影覆盖的区域。但是该区域小于云的实际影响范围。因此,提高云和阴影的检测精度是下一步研究的重点。另外,需进一步探讨如何准确区分水体和阴影,提高模型进行水稻识别的精度。
参考文献
-
Bischof H, Schneider W and Pinz A J. 1992. Multispectral classification of Landsat-images using neural networks. IEEE Transactions on Geoscience and Remote Sensing, 30(3):482-490[DOI:10.1109/36.142926]
-
Chen J, He C Y, Shi P J, Chen Y H and Ma N. 2001. Land use/cover change detection with change vector analysis(CVA):change magnitude threshold determination. Journal of Remote Sensing, 5(4):259-266(陈晋, 何春阳, 史培军, 陈云浩, 马楠. 2001. 基于变化向量分析的土地利用/覆盖变化动态监测(I)——变化阈值的确定方法. 遥感学报, 5(4):259-266)[DOI:10.11834/jrs:20010404]
-
Cheng Q, Shen H F, Zhang L P, Yuan Q Q and Zeng C. 2014. Cloud removal for remotely sensed images by similar pixel replacement guided with a SPATIO-temporal MRF model. ISPRS Journal of Photogrammetry and Remote Sensing, 92:54-68[DOI:10.1016/j.isprsjprs.2014. 02.015]
-
Cortes C and Vapnik V. 1995. Support-vector networks. Machine Learning, 20(3):273-297[DOI:10.1007/BF00994018]
-
Griffiths G H and Mather P M. 2000. Editorial:remote sensing and landscape ecology:landscape patterns and landscape change. International Journal of Remote Sensing, 21(13-14):2537-2539[DOI:10.1080/01431160050110151]
-
Hatfield J L, Gitelson A A, Schepers J S and Walthall C L. 2008. Application of spectral remote sensing for agronomic decisions. Agronomy Journal, 100(Supplement_3):S-117-S-131[DOI:10.2134/agronj 2006.0370c]
-
Huang C, Davis L S and Townshend J R G. 2002. An assessment of support vector machines for land cover classification. International Journal of Remote Sensing, 23(4):725-749[DOI:10.1080/01431160110040323]
-
Huang J F, Chen L, Wang J and Wang X J. 2013. Uncertainty analysis of rice planting area extraction based on different classifiers using Landsat data. Transactions of the Chinese Society of Agricultural Engineering, 29(6):166-176(黄敬峰, 陈拉, 王晶, 王秀珍. 2013. 水稻种植面积遥感估算的不确定性研究. 农业工程学报, 29(6):166-176)[DOI:10.3969/j.issn. 1002-6819.2013.06.021]
-
Kawata Y, Ohtani A, Kusak T and Ueno S. 1990. Classification accuracy for the MOS-1 messr data before and after the atmospheric correction. IEEE Transactions Geoscience Remote Sensing, 28(4):755-760[DOI:10.1109/TGRS.1990.573015]
-
Li W G and Li H. 2010. Estimating rice yield by HJ-1A satellite images. Chinese Journal of Rice Science, 24(4):385-390(李卫国, 李花. 2010. 利用HJ-1A卫星遥感影像进行水稻产量分级监测预报研究. 中国水稻科学, 24(4):385-390)[DOI:10.3969/j.issn. 1001-7216.2010.04.009]
-
Liu S C, Du P J and Chen S J. 2011. A novel change detection method of multi-resolution remotely sensed images based on the decision level fusion. Journal of Remote Sensing, 15(4):846-862(柳思聪, 杜培军, 陈绍杰. 2011. 决策级融合的多分辨率遥感影像变化检测. 遥感学报, 15(4):846-862)[DOI:10.11834/jrs.20110098]
-
Louisa L and Suen C Y. 1997. Application of majority voting to pattern recognition:an analysis of its behavior and performance. IEEE Transactions on Systems, Man and Cybernetics, Part A:Systems and Humans, 27(5):553-568[DOI:10. 1109/3468.618255]
-
Lu D, Mausel P, Brondízio E and Moran E. 2004. Change detection techniques. International Journal of Remote Sensing, 25(12):2365-2401[DOI:10.1080/0143116031000139863]
-
Ma L, Xu X G, Jia J H, Huang W J, Liu L Y and Cheng Y P. Crop classification method using multi-temporal TM images. Transactions of the CSAE, 24(S2):191-195(马丽, 徐新刚, 贾建华, 黄文江, 刘良云, 程一沛. 2008. 利用多时相TM影像进行作物分类方法. 农业工程学报, 24(S2):191-195)
-
Maclean J L, Dawe D C, Hardy B and Hettel G P. 2002. Rice Almanac:Source Book for the Most Important Economic Activity on Earth. 3rd ed.UK:CABI Publishing:4-5
-
Shi W Z and Hao M. 2014. Analysis of spatial distribution pattern of change-detection error caused by misregistration. International Journal of Remote Sensing, 34(19):6883-6897[DOI:10.1080/01431161.2013.810353]
-
Singh A. 1989. Review article digital change detection techniques using remotely-sensed data. International Journal of Remote Sensing, 10(6):989-1003[DOI:10.1080/01431168908903939]
-
Song C, Woodcock C E, Seto K C, Lenney M P, Macomber S A. 2001. Classification and change detection using landsat TM data:when and how to correct atmospheric effects?. Remote Sensing of Environment, 75(2):230-244[DOI:10.1016/S0034-4257(00) 00169-3]
-
Wu C H, Du P J and Xia J S. 2012. A method of water extraction based on voting method fusion for ASTER remote sensing image. Remote Sensing Information,(2):51-56[DOI:10.3969/j.issn.1000-3177.2012.02.010](吴春花, 杜培军, 夏俊士. 2012. 一种基于投票法融合的ASTER遥感影像水体提取方法. 遥感信息,(2):51-56)[DOI:10.3969/j.issn.1000-3177.2012.02.010]
-
Wu M Q, Wang C Y and Niu Z. 2010. Mapping paddy fields in large areas, based on time series multi-sensors data. Transactions of the CSAE, 26(7):240-244(邬明权, 王长耀, 牛铮. 2010. 利用多源时序遥感数据提取大范围水稻种植面积. 农业工程学报, 26(7):240-244)[DOI:10.3969/j.issn.1002-6819.2010.07.041]
-
Xiao X, Boles S, Frolking S, Salas W, Moore Ⅲ B, Li C, He L and Zhao R. 2002. Landscape-scale characterization of cropland in China using vegetation and landsat TM images. International Journal of Remote Sensing, 23(18):3579-3594.[DOI:10.1080/01431160110106069]
-
Yu J and Ranneby B. 2007. Nonparametric and probabilistic classification of agricultural crops using multitemporal images. Journal of Remote Sensing, 11(5):748-755(俞军, Ranneby B. 2007. 基于多时相影像的农业作物非参数与概率分类. 遥感学报, 11(5):748-755)[DOI:10.11834/jrs:200705102]
-
Zhang F F, Li W Z, Lu L Y, Zhang Q F and Kang L. 2012. Technologies of extracting land utilization information based on SVM method with multi-window texture. Journal of Remote Sensing, 16(1):67-78(张伐伐, 李卫忠, 卢柳叶, 张青峰, 康乐. 2012. SVM多窗口纹理土地利用信息提取技术. 遥感学报, 16(1):67-78)[DOI:10.11834/jrs:20120415]
-
Zhu S, Zhang J S, Shuai G Y and Yu Q Y. 2014. Winter wheat mapping by soft and hard land use/cover change detection. Journal of Remote Sensing, 18(2):476-496[DOI:10.11834/jrs.20143078](朱爽, 张锦水, 帅冠元, 喻秋艳. 2014. 通过软硬变化检测识别冬小麦. 遥感学报, 18(2):476-496)[DOI:10.11834/jrs.20143078]


