 2010, 21 (2): 149-156
2010, 21 (2): 149-156


2. 中国科学院研究生院,北京 100049;
3. 国家卫星气象中心,北京 100081
2. Graduate University of Chinese Academy of Sciences, Beijing 100049;
3. National Satellite Meteorological Center, Beijing 100081
风云四号 (FY-4) 气象卫星是我国第二代静止轨道气象卫星,采用三轴稳定姿态控制方式,与我国第一代静止气象卫星 (FY-2) 采用的自旋稳定姿态控制方式有本质不同①。自旋稳定卫星在对地观测的过程中,其姿态参数变化极其缓慢,在两次卫星轨道控制之间,卫星姿态的日变化很小[1-2]。而三轴稳定卫星24h的姿态变化曲线显示出持续不断变化的特点[3],只有准确测出这种不断变化的姿态,才能进行准确的图像配准和定位。FY-2气象卫星的图像定位通过基于地球边缘检测的方法取得了很好的效果[4],但这种方法不能满足FY-4气象卫星图像定位的需求。FY-4气象卫星上搭载的高精度星敏感器将用来实现高精度的卫星姿态测量,它以可精确定位的恒星系统作为绝对参照系,通过对恒星的观测、识别、计算得到星敏感器光轴的指向或三轴姿态,并根据星敏感器的安装方位等信息,计算出在轨运行卫星的姿态。
导航星库是星敏感器实现星图识别的重要依据,用来存储事先选定的导航星识别信息。郑胜等[5]采用基于动态星等阈值的支持向量机的导航星自动选择算法来建立导航星数少且分布均匀的导航星表;刘朝山等[6]根据弹道设计导航星表,从而极大简化了弹载星表;Airey等[7]在HYPER高精度星敏感器中挑选导航星的条件更加苛刻,只选取了可视星等在[+2.81,+3.99]、B-V颜色指数在[+0.15,+1.67]之间的恒星,且不是变星和双星,其自行精度优于0.008″/a,赤经、赤纬和视差优于0.003″恒星。
①许健民.风云四号图像配准与定位地面系统应做工作.北京:国家卫星气象中心,2004
目前看到的文献都是以某一单独星表展开的,除陈元枝等[8]采用年中平位置进行历元转换外,其他方法均未提及历元转换 (文献[7]苛刻的选择条件已规避了恒星历元之间的位置变化)。常见的星表如Hipparcos星表的历元是J1991.25,Tycho-2星表[9]的历元是J2000,SAO星表[10]提供了B1950.0平分点历元位置和自行值及J2000.0位置和自行值。FY-4气象卫星的发射在2012年之后,和星表历元相距经历了10 20年之后,恒星的测瞬位置和星表位置会有或多或少的变化 (以HIP编号为57939的恒星为例,从J1991.25通过精密历元至J2012.0,与其在Hippar-cos星表中位置相比,赤经差为0.0292°,约105.12″,赤纬差为-0.0335°,约-120.6″),这一变化在星图识别过程中可忽略不计,但在高精度姿态确定过程中应该考虑。文献[11]中为了提高星敏感器的姿态确定精度采用了一个假设,即星表历元为当前时刻,且考虑了光行差的影响,这也从某种程度上说明了精密历元转换的重要性。文献[12]基于地面应用系统计算资源和存储资源充沛的优势,从提高姿态确定精度出发,首次将精密历元转换后的位置精度作为优选导航星的基本条件,引入了辅助导航星的概念。本文在文献[12]的基础上,做了进一步的分析和对导航星提取处理的完善,通过对选取的恒星赋予不同的标识决定其是否参与星图识别和姿态确定处理过程,并引入了冗余星概念。
1 导航星的选取古代的天文学家认为恒星在星空的位置是永恒不变的,称其为恒星。实际上恒星无时无刻不在做大范围、小范围的运动[13]。
1.1 恒星精密历元转换在恒星运动标准模型中假设恒星的运动是匀速空间运动,恒星在天球上的运动轨迹是个大圆弧②。恒星沿该大圆弧的角速度 (自行) 是变化的,当恒星沿其轨道在近日点运动时自行最大;其距离 (视差) 和视向速度也是变化的。在精密历元转换时赤经α、赤纬δ、视差π、赤经自行μα*、赤纬自行μδ、视向速度VR(以下称6个天文参数) 的变化都必须加以考虑。根据恒星运动标准模型,Hipparcos星表给出了描述恒星运动的前5个天文参数 (赤经、赤纬、视差、赤经自行、赤纬自行) 矢量a及其协方差矩阵C。其中矢量a为5×1维,矩阵C为5×5维。通过加权最小二乘法估计5个变量,其公式如下:
② The Hipparcos and Tycho Catalogues ESA SP1200.1997, 1(2), 1(5).

|
(1) |
基于最小二乘估计,所有估值aiest的信息都包含于5×5的协方差矩阵中,其矩阵要素cij=E[(aiest-aitrue)(ajest-ajtrue)],其中i,j=1,…,5。方差-协方差矩阵的要素由估计参数的标准偏差σi和相关系数ρij (=ρji) 组成:

|
(2) |
Hipparcos星表提供了式 (2) 给出的C的第1 5行和第1 5列的值。对于精密历元,必须扩充到和参数ζ=VRπ/A相关的第6行和第6列。视向速度VR是借助分光镜测得的,其标准偏差为σVR,假设其在统计意义上独立于星表中的其他天文参数,则有

|
(3) |
为了进行恒星的精密历元转换,必须知道每颗恒星的6个天文参数、参数的标准偏差及其相关系数,很少有单一的星表能提供所有这些数据。为此选取Hipparcos星表,Tycho-2星表,Pulkovo视向速度表[14]和SAO星表 4个数据源,综合利用其结果来完成导航星的选取工作。
1.2 导航星的选取原则FY-4气象卫星定位用导航星选取首先将星敏感器所能探测到的最暗恒星的星等作为选取导航星的星等阈值 (这里假设为6.5星等); 为了改善导航星不精确引起的姿态误差,选取导航星的位置精度阈值设为1″; 为了提高星图识别速度,引入辅助导航星;根据长期的星图识别失败个例分析,剔除容易引起相似匹配的冗余星;根据DE405大行星历及行星视星等信息计算亮度亮于星等阈值的行星在卫星历元时刻的位置,对出现在同一位置且亮度暗于行星亮度的恒星进行掩星处理,赋予动态有效标志更新,使其在导航星库中暂时“不可用"。
1.3 导航星的选取方法以目前公认精度最高的J1991.25Hipparcos星表为中心,以星敏感器光学系统的观测极限为星等阈值,联合Tycho-2星表、SAO星表及Pulkovo视向速度表,通过精密历元转换使J1991.25 Hippar-cos星表中符合精密历元条件的恒星精密历元至J2000.0历元时刻,得到J2000.0 Hipparcos星表。在相同的历元J2000.0时刻,选取J2000.0Hipparcos星表和Tycho-2星表中位置精度阈值在1″内的共星作为导航星,选取除导航星外的J2000.0Hipparcos星表和SAO星表中位置精度阈值在1″内的共星作为辅助导航星,通过模拟星图识别失败个例分析提取冗余导航星,使其排除在导航星之外。
具体的选取步骤为:对Hipparcos主星表进行处理,提取视星等亮于6.5星等的恒星赤经、赤纬、自行、视差及其标准偏差和相关系数信息。剔除Hipparcos导航星表中的双星和多星。这里的剔除并非真正的删除,而是赋予一个恒星标识2,目的是在后续的工作中完善双星和多星在星图识别及姿态确定中的作用,尤其是在恒星比较稀疏的天区。
从Pulkovo视向速度表中提取视向速度及平均误差信息,并将该信息追加到J1991.25 Hipparcos导航星表中。对J1991.25 Hipparcos导航星进行精密历元转换到J2000.0历元时刻,生成J2000.0Hipparcos导航星表。分析Tycho-2主星表与J2000.0Hipparcos导航星表的赤经、赤纬、自行及其对应的平均误差信息及星等信息,位置精度阈值取1″,共得到6072颗导航星,赋予恒星标识0。从SAO星表中提取星等亮于6.5的恒星HD编号,在J1991.25 Hipparcos星表中通过HD编号查找到恒星的HIP编号。从Tycho-2主星表中提取平位置标志为X且星等亮于6.5的恒星HIP编号;从suppl_1.dat中提取星等亮于6.5的恒星HIP编号。提取、、、中共有的恒星HIP编号,剔除其中的双星和多星,赋予恒星标识2。利用J1991.25Hipparcos星表中的信息进行精密历元转换至J2000.0,选取和SAO星表中位置精度阈值在1″内的恒星作为辅助导航星,共189颗,赋予恒星标识5。利用J1991.25Hipparcos星表中的信息进行精密历元转换,转换至卫星历元时刻 (这里假设为2012年1月1日),生成卫星历元时刻辅助导航星星表,并将辅助导航星信息追加到导航星数据文件中。○11从星图识别的失败个例中剔除引起冗余匹配的导航星,赋予冗余星标志6,并将冗余星信息追加到导航星数据文件中。○12比对精密历元至卫星历元时刻的恒星位置,与J1991.25Hipparcos星表中的相应位置,对于历元转换前后位置标准差对于1″的恒星,赋予恒星标识3,并将位置精度信息追加到导航星数据文件中。
至此,FY-4气象卫星定位用的导航星星表 (含辅助导航星) 建立,该星表在保证恒星位置精度前提下,将星敏感器所能观测到的所有恒星全部包括。
2 辅助导航星的意义 2.1 导航星及辅助导航星的分布按照上述导航星选取方法,星等阈值取6.5,位置精度阈值小于1″,所得的6072颗导航星及189颗辅助导航星在历元2012年1月1日的分布如图 1所示,从图 1可以看出南北两天极的导航星比较稀疏。

|
|
| 图 1. 导航星分布示意图 Fig 1. Theguidestarmap | |
只有保证视场 (FOV) 内有3颗以上导航星才可能实现星敏感器的全天自主星图识别。因此,对不同星等阈值及不同视场大小进行了导航星分布统计,结果如表 1所示。
对表 1、表 2分析制图得图 2、图 3、图 4,图中含“*"标识的为添加辅助导航星的情况,制图时使用实线,不含辅助导航星的情况制图时使用虚线。
|
|
表 1 不同星等和视场大于3颗导航星的FOV统计表 (无辅助导航星) Table 1 Statistics of different magnitude and FOV (excluding additional guide star) |

|
|
表 2 不同星等和视场大于3颗导航星的FOV统计表 (含辅助导航星) Table 2 Statistics of different magnitude and FOV (including additional guide star) |


|
|
| 图 2. 导航星分布直方图 Fig 2. The histogram of guide star distribution | |

|
|
| 图 3. 不同视场条件下的天区覆盖度比较 Fig 3. Sky cover statistics of different FOV | |

|
|
| 图 4. 不同星等条件下的天区覆盖度比较 Fig 4. Sky cover statistics of different magnitude | |
图 2给出了Hipparcos星表恒星、导航星、含辅助导航星的导航星分布直方图,从星表恒星的分布可以明显看出随着星等阈值的增加 (即恒星亮度的降低) 恒星数目递增得比较明显,而导航星及含辅助导航星的导航星的递增相对平缓,这是位置精度阈值起作用的结果。位置精度阈值提供了一个优选导航星的方法,使那些更符合标准恒星运动模型的恒星作为导航星。
对表 1和表 2中的统计数据进行对比分析,可以看出:随着视场的扩大,视场内导航星大于3颗的天区比例在递增,星等越低,递增得越明显 (图 3),星等暗于6.5(即星等值大于6.5),视场大于15°×15°时达到饱和 (表 1、表 2); 随着星等阈值的增大,导航星数目几乎成倍增加 (图 2),相同视场内导航星大于3颗的天区比例在递增 (图 4); 添加辅助导航星 (实线) 的天区覆盖率优于不含辅助导航星 (虚线) 的情况,在星等阈值亮于5(及星等阈值小于5) 的情况下,添加辅助导航星比不含辅助导航星的天区覆盖率明显增高,说明辅助导航星引入了大量亮星;整体来看表 2大于3颗导航星的天区覆盖率优于表 1的 (图 3、图 4)。
在表 1中,星等阈值为6.5时,20°×20°的视场的天区覆盖率小于18°×18°视场的天区覆盖率,从天区统计资料中分析发现:出现这种情况是由于北天极附近 (90° 70°,240° 220°) 恒星稀疏,且天区的划分采用无覆盖方式所致。在表 2中无此类现象发生,也进一步说明了辅助导航星的添加意义重大,它不仅引入大量的亮星,还弥补了极区恒星稀疏的不足。
由此可见,扩大星敏感器的视场或提高星敏感器的探测星等都可以提高视场内导航星大于3颗的天区比例;引入辅助导航星不仅引入了大量的亮星,还提高了大于3颗导航星的天区覆盖率。
2.2 辅助导航星的可用性分析为了证明辅助导航星的可用性,从Pulkovo视向速度表和SAO星表中提取了亮于6.5星等的星共7321颗,剔除双星和多星后,余下5539颗恒星,利用J1991.25 Hipparcos星表中的信息进行精密历元转换,转换至J2000.0,再与SAO中恒星的J2000.0平位置进行比较,当位置精度取1″时,剩下的恒星为3316颗 (称作SAO导航星,SAO星表中符合恒星标准运动模型的恒星相对较少,这也说明了基于地面观测的SAO星表和基于卫星观测的Hipparcos星表对恒星在国际天球参考系ICRS中的位置归算算法是有区别的),其中有3127颗为6072颗中的导航星,另外189颗恰恰是辅助导航星,由此可以证明这189颗辅助导航星是可用的。
从图 1可以看出辅助导航星的全天分布比较均匀。辅助导航星中亮星比例较高,在189颗辅助导航星中星等亮于3的恒星占34.4%,在3316颗SAO导航星中,星等亮于3的恒星占2.6%,而在6072颗导航星中星等亮于3的恒星只占0.56%(这说明Tycho-2主星表中给出有J2000.0平位置的亮星相对较少,单以Tycho-2主星表中的恒星进行星图识别的优势相对较弱); 在3316颗SAO导航星中,星等亮于3的亮星有87颗,其中辅助导航星有65颗,亮星所占比例高达74.7%。由此可见,辅助导航星的引入为导航星注入了大量的亮星,有利于星图识别。
3 导航星定制及历元转换精度分析FY-4静止气象卫星的发射在2012年之后,图 1给出了FY-4星敏感器2012年1月1日历元时刻的导航星全天球分布情况。
3.1 可见光通道CCD星敏感器导航星成像仪视场决定了成像仪不可能观测到整个天球上的恒星,恒星赤纬决定了恒星出现在扫描成像仪视场中的高度,恒星赤经决定了恒星出现在视场中的时间。扫描成像仪的视场为:东西23°×南北21°,地球在视场中占17.4°,能够观测恒星的视场区域如图 5所示,其中分为两个部分[15-16]:

|
|
| 图 5. 可见光通道CCD星敏感器可测到的导航星及辅助导航星 Fig 5. The guide star and additional guide star be able to observed by VIS channel CCD | |
·不受地球遮挡的两个矩形区域
每个矩形视场东西23°×南北1.8°,8.7° < |恒星赤纬|≤10.5°,恒星不受地球遮挡,能够被辐射计长时间观测 (图 5中红线以上和蓝线以下的区域)。
· 4个圆弧区域0°
< |恒星赤纬|≤8.7°,恒星受地球遮挡,部分时间可观测 (图 5中红线与蓝线之间的区域)。
从图 1、图 5可以看到双星和多星在全天球及可见光通道CCD观域内的分布非常广泛,单纯剔除双星和多星的做法并不十分可取,尤其是对于星图识别而言。
比较可行的方法是在选取导航星时,将双星包括进来,星等取二者的平均值,赋予双星标识2,双星只参与星图识别过程,但不参与姿态确定处理,这样既可以提高星图识别率,也可以确保姿态确定精度。
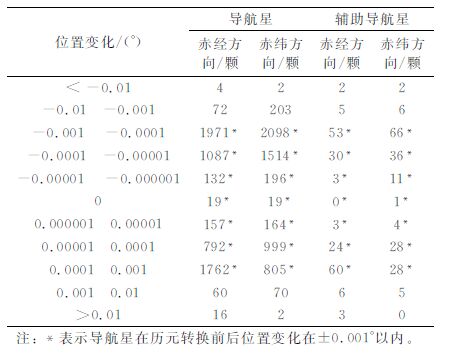
3.2 历元转换精度对精密历元转换前后的导航星位置进行比对,赤经和赤纬均取J2012.0—J1991.25(导航星6072颗,辅助导航星189颗),从位置变化统计表 3可以看出,历元转换前后位置变化在±0.001°(±3.6″) 以内的分别占97.5%,95.4%,91.5%和92%,这些恒星都可以满足角秒级的星敏感器视轴姿态确定精度。对于位置变化绝对值大于±0.001°的导航星,则只参与星图识别,不参与姿态确定。
|
|
表 3 导航星与辅助导航星位置变化分布 |
4 仿真试验 4.1 星图识别试验
以CCD尺寸1024像元×1024像元,星等阈值6.5,视场 (视场代表着摄像头能够观察到的最大范围,通常以角度来表示,视场越大,观测范围越大)12°×12°为例。基于地面应用系统的全天自主星图识别采用改进的三角形识别算法,在星等容差0.6,角距容差0.3°条件下,利用蒙特-卡罗方法随机产生1000个视轴,分别挑选视场中最亮的前5颗和前6颗星进行识别,其中又分为加入伪星和不加伪星、添加辅助导航星和不加辅助导航星、位置精度阈值取1″和0.09″共16种情况进行星图识别 (详细统计数据及分析图表见文献[12])。试验结果表明:在不加辅助导航星的情况下,识别速度和导航星数目成反比,导航星数目越大,识别速度越慢;添加了辅助导航星后,虽然导航星总数增加了189颗,识别速度提高了6%以上,打破了识别速度与导航星数目成反比的关系,且识别成功率略有提高或相等。
因此,基于地面系统的导航星库满足了星图识别算法的需求,识别精度和识别速度满足了地面姿态确定的需求,说明该导航星选取方法是切实可行的。
4.2 剔除冗余星试验分析星图识别试验的输出日志发现,引起星图识别失败的原因是由于3颗编号分别为1705,1752,1760的导航星与加入的伪星 (其编号分别为1643,1643,1819) 相互匹配,即形成了相似三角形。于是将上述3颗导航星从导航星表中剔除,剔除之后发现又产生了新的冗余星 (164→71629(伪星))。剔除冗余导航星后星图识别速度和剔除前的变化不大,但识别成功率有所提高,从原来的识别率97.7%以上提升至99.7%以上,由此可以看出,剔除极少数的几颗冗余导航星对星图识别成功率的提高有一定贡献。
值得注意的是:冗余星的剔除与光学系统的精度、视场大小、星图识别算法有关,即冗余星是有条件的,在某种光学系统的某一视场条件下是冗余导航星,到了另一个光学系统、另一视场则未必是冗余导航星,因此冗余导航星的剔除应慎重,视特定条件而定。
5 小结如何从基础星表数据选取导航星对星图识别算法及卫星姿态确定都会产生影响。本文以目前公认精度最高的J1991.25 Hipparcos星表为中心,以星敏感器光学系统的观测极限为星等阈值,联合Ty-cho-2星表、SAO星表及Pulkovo视向速度表,通过精密历元转换使J1991.25 Hipparcos星表中符合精密历元条件的恒星精密历元至J2000.0历元时刻,得到J2000.0 Hipparcos星表。在相同的历元J2000.0时刻,选取J2000.0 Hipparcos星表和Ty-cho-2星表中位置精度阈值在1″内的共星作为导航星,选取除导航星外的J2000.0 Hipparcos星表和SAO星表中位置精度阈值在1″内的共星作为辅助导航星,通过模拟星图识别失败个例分析剔除冗余导航星。主要结论如下:
1) 在选取导航星的过程中,位置精度阈值的引入,使用高精度的恒星作为导航星,为高精度的卫星姿态反演奠定了基础,通过精密历元转换计算FY-4气象卫星观测历元时刻的导航星精确位置,与直接利用常用星表中提供的恒星位置相比,改善了参考星的输入误差。
2) 辅助导航星的引入,与单一使用Tycho-2星表相比引入了大量亮星 (189颗辅助导航星遍及全天球,其中亮于3等星的恒星占34.4%),且弥补了部分天区恒星稀疏无法满足星图识别条件的不足,这将十分有利于提高星图识别速度和识别率。
3) 冗余导航星的剔除,为进一步提高星图识别率提供了可能。剔除冗余导航星后虽然星图识别速度和剔除前的变化不大,但识别成功率从原来的97.7%以上提升至99.7%以上,由此可见,剔除极少数的几颗冗余导航星对星图识别成功率的提高有一定贡献。
下一步要改进的工作有:根据DE405大行星历及行星视星等信息计算亮度亮于星等阈值的行星在卫星历元时刻的位置,对出现在同一位置且亮度暗于行星亮度的恒星进行掩星处理,赋予动态有效更新标志,使其在导航星库中暂时“不可用",从而进一步提高星图识别成功率。在星图识别过程中加入双星,进一步提高星图识别效率;在姿态确定过程中剔除双星,从而保证姿态确定精度。根据卫星观测历元时刻精密历元后的卫星位置与J1991.25Hipp-arcos星表中恒星的位置差进一步筛选导航星,对于位置差大于1″的恒星进行标识,使其只参与星图识别过程,而不参与姿态确定过程。
| [1] | Lu Feng, Menzel W Paul, Christopher S Velden. At-tempts to Improve GOES Image Navigation, 2006. |
| [2] | 陆风, 许健民, 张其松. 风云二号气象卫星姿态和沿步进方向失配角参数对图像影响的模拟研究. 应用气象学报, 2001, 12, (4): 393–399. |
| [3] | 陆风,基于几何分析的静止卫星云顶高度定量反演研究,北京:北京大学,2008. |
| [4] | Lu Feng, Zhang Xiaohu, Xu Jianmin, Image navigation for the FY2 geosynchronous meteorological satellite. J Atmos O-cean Technol, 2008, 25: 1149–1165. DOI:10.1175/2007JTECHA964.1 |
| [5] | 郑胜, 吴伟仁, 田金文. 一种新导航星选取算法研究. 宇航学报, 2004, 25, (1): 35–40. |
| [6] | 刘朝山, 马瑞萍, 肖称贵. 星图匹配制导中的关键技术. 宇航学报, 2006, 27, (1): 31–35. |
| [7] | Airey S P.Bagnasco G.Barilli M Extreme Accuracy Star Tracker in Support of HYPER Precision Cold Atom In-terferometry[AAS 03-505] 2003.http://sci2.esa.int/hy-per/docs/gnc_2003_east.pdf. |
| [8] | 陈元枝, 郝胜国, 王国辉. 适用于星敏感的器的导航星星库制定. 光学精密工程, 2000, 8, (4): 331–334. |
| [9] | Hg E.Fabricius C.Makarov V V Guide to the Ty-cho-2 Catalogue 2000.http://www.astro.ku.dk/cf/CD/docs/guide.pdf. |
| [10] | Nancy G Roman,Wayne H Warren Jr,Smithsonian Astrophysical Observatory Star Catalog (SAO)[NSSDC/WDC-A-R&S89-08],1989. |
| [11] | Allan Read Eisenman, Carl Christian Liebe. The Advancing State-of-the-art in Second Generation Star Trackers, 1998, 1: 111–118. |
| [12] | 王素娟, 郭强, 许键民. 适用于地面应用系统的导航星数据库的建立. 宇航学报, 2009, 30, (1): 387–393. |
| [13] | 胡中为. 普通天文学. 南京: 南京大学出版社, 2003. |
| [14] | Gontcharov G A Pulkovo Compilation of Radial Velocities for 35493 Hipparcos Stars in a Common System.http://da-ta.bao.ac.cn/viz-bin/Cat?/252. |
| [15] | 李晓坤, 王淦泉, 陈桂林. 风云四号气象卫星扫描成像仪--可见光通道星敏感. 科学技术与工程, 2007, 7, (6): 993–996. |
| [16] | 李晓坤, 陈桂林. 地球静止轨道三轴稳定气象卫星辐射计--可见光通道CCD星敏感. 科学技术与工程, 2007, 7, (19): 4897–4899. |