 2009, 20 (5): 579-585
2009, 20 (5): 579-585


2. 北京市气象台, 北京 100089;
3. 黑龙江省气象局, 哈尔滨 150001
2. Beijing Meteorological Observatory, Beijing 100089;
3. Meteorological Bureau of Heilongjiang Province, Harbin 150001
20世纪70年代初, 为了实施全球大气研究计划 (GRAP) 的大西洋热带试验项目, NCAR研发了Omega导航下投探空仪[1-2]。1997年起, 美国国家飓风中心开始利用喷气发动机飞机进行对流层高层的机载探空观测, 并利用全球卫星定位系统进行定位, 大幅提高了水平风场观测的准确度, 从而进一步提升了预报台风的时效性和准确性[3-5]。美国从1997年到2002年利用气象无人驾驶飞机投放全球卫星定位探空仪, 针对大西洋海域可能影响美国本土及加勒比海地区的飓风进行观测研究, 可将未来24~72 h的台风预报路径误差平均降低10%~30% [6], 所具有的特征也显示了台风的强度[7]及移动路径[8]。以澳大利亚气象局为代表的科学家在20世纪90年代初, 就开始提出飞行探空仪的概念, 其目的之一就是希望能够实现对热带气旋的监测。1995年11月, 无人探空飞机在澳洲北部外海进行MCTEX飞行试验, 1996年在奥瑞冈和澳洲西部进行了多次飞行, 并包括了长航时的测试[9]。日本也有此方面的研究, Moteki等[10]给出了2005年6月在热带西太平洋地区进行的风、温度、相对湿度和气压探测。结果表明:由于将探空数据同化进入模式, 在热带西太平洋地区其风速误差为1~3 m/s, 有了一定的改善。中国台湾的“追风计划”自2001年以来一直致力于台风探测的研究工作[11], 2005年成功穿越了台风龙王, 利用无人机搭载的传感器, 获得了700 hPa台风眼及眼墙区的温度、相对湿度及风场数据, 所获得的台风眼的地面气压数据与当地气象局的预报结果很接近[12]。
1993年, 我国开始了微型无人驾驶气象探空飞机的研制, 1994年底, 自控微型飞机首次完成了自主飞行。自1997年, 在气象科学试验、人工影响天气、国防科学试验等方面开展了大量的试验和应用[13-15]。
本文在认真研究无人机台风探测成功经验的基础上, 于2008年7月18日首次开展了中国大陆无人机台风探测工作, 针对2008年的第7号台风海鸥展开探测。对台风海鸥的探测是一次成功获取了探测资料, 同时无人机又安全返回陆地的探测。无人机距离台风中心最近距离108.4 km, 在近4 h的飞行过程中, 巡航距离为115 km, 经历了降水区、逆风区、强对流区等较为恶劣的飞行环境, 基本实现了飞行探测、数据采集、处理及分发一体化的准实时探测体系。
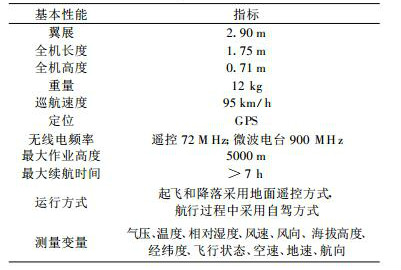
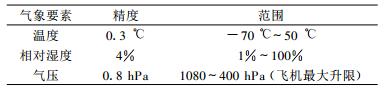
1 无人机简介本次探测使用的是北京东恒宇技术开发中心研制的CN-1型无人机, 其基本性能指标如表 1所示。表 2给出了基本气象要素 (温度、相对湿度和气压) 的静态测试指标。
|
|
表 1 基本性能指标 Table 1 Basic performance indexes |
|
|
表 2 气象要素静态测试指标 Table 2 Static test indexes of meteorological elements |
2 探测与资料
无人机对0807号台风海鸥进行了近4 h飞行探测, 成功获得了温度、气压、相对湿度、风向、风速及海拔高度等基本气象要素数据。
2.1 航线设计2008年7月18日, 根据中国气象局发布的06:00(北京时, 下同) 云图, 采用直接向台风中心方向飞行的航线, 测试无人机对台风的适应能力, 为确保探测成功还考虑了应急措施。
起飞和降落点的经纬度为27.77°N, 120.69°E; 从27.77°N, 120.69°E到27.71°N, 120.74°E的航高为300 m; 从27.71°N, 120.74°E到26.77°N, 120.97°E的航高为500 m; 返航点为26.77°N, 120.97°E。
2.2 飞行探测图 1显示了无人机探测飞行轨迹及相对台风的位置, 红色线为无人机飞行轨迹。2008年7月18日10:17起飞, 13:54安全着陆。距台风中心最近距离为108.4 km。大部分时间在台风云系下的降水区中飞行。由于离台风中心较近, 风速较大 (最大风速为22.3 m/s), 在从海岸飞向台风中心时无人机地速很低, 移动缓慢。

|
|
| 图 1. 2008年7月18日无人机飞行轨迹 (红色线为飞行轨迹, 飞机从陆地飞向海洋及返航从海洋飞向陆地, 黄色点为台风中心位置: 25.8°N, 120.8°E) Fig 1. VAV flight trajectory on 18 July 2008 (the red line is fight trajectory, which shows the UAV flying from land to the sea and returned; the yellow dot stands for the center of typhoon Kalmaegi 25.8°N, 120.8°E) | |
2.3 探测资料
无人机配备了机载探空仪, 能够探测大气温度、气压、相对湿度、风向和风速等基本气象要素, 通过“北斗”卫星将探测数据传输到地面接收器, 每10 s传输一组数据, 理论上应获取数据1281组, 实际获取数据1202组, 气象要素数据获取率为93.8%。
3 资料初步分析 3.1 气压和海拔高度资料分析图 2为2008年7月18日无人机探测台风的气压和海拔高度变化图。由于空域限制, 本次探测高度设定为300 m和500 m。从图 2无人机飞行高度曲线可以看出, 飞机达到设定高度后, 其飞行高度很稳定, 基本维持在300±20 m和500±20 m的高度。说明这种小型无人机能够在台风海鸥的风场中正常飞行。12:40左右, 达到了本次探测高度的最大值626 m, 其变化较为连续, 该时刻为无人机返航。从图 1的飞行轨迹来看, 无人机返航点也是无人机距离台风中心最近的位置, 此处出现了探测高度的最大值, 也有可能是受到台风环流场的影响, 距离台风中心越近, 其上升运动越强烈, 有关此方面的解释还需要做进一步验证。

|
|
| 图 2. 2008年7月18日无人机探测台风“海鸥”的气压和海拔高度变化图 Fig 2. The pressure and altitude variability of typhoon Kalmaegi observed by UAV on 18 July 2008 | |
无人机起飞后, 到达300 m高度持续飞行一段时间, 时间该段内气压基本维持在965~970 hPa之间, 其平均值为966.4±2.9 hPa。500 m是主要飞行高度, 气压平均值为944.2±2.6 hPa, 可以看出该高度上所测量的气压值相对稳定, 从其标准偏差来看, 气压实测值偏离平均值的程度较小。13:37开始下降, 在300 m高度遥控盘旋10 min后降落, 该时间段内的气压平均值为963.5±2.1 hPa, 与起飞阶段的气压平均值相差不大。从图 2中还可以看出, 在12:40返航前后, 所对应的气压值最低, 因此可以推断, 随着时间的推移, 飞机逐渐向台风中心靠近, 气压逐渐降低, 距离台风中心最近处, 气压达到了最低值, 而且在返航处, 有较为明显的气压扰动, 返航后气压逐渐升高。
图 3为0~300 m和300~500 m两段爬升过程中气压随高度的变化曲线图。从两段爬升曲线来看, 气压随高度的增加呈现明显的反相关, 0~300 m阶段, 其相关系数达到了0.94, 气压与高度呈现显著性相关 (显著性水平α < 0.0001); 300~500 m阶段, 其相关系数达到了0.98, 气压与高度呈现显著性相关 (α < 0.0001), 从图中两段曲线来看, 300~500 m的高空阶段其相关性更好, 而且两个爬升阶段其曲线的变化趋势比较类似, 这说明, 在不同的时间段内, 不同的爬升高度, 气压随高度的递减趋势是一致的。

|
|
| 图 3. 0~300 m及300~500 m爬升状态下的气压变化 Fig 3. The pressure variability during the UAV climbing from the ground to 300 meters high and from 300 to 500 meters high | |
3.2 温度资料分析
图 4为7月18日无人机探测台风的温度随时间变化图。从数据结果来看, 飞机自起飞至爬升到300 m时间段内, 其平均温度为28.6±1.16 ℃, 在300 m盘旋时间段内的平均温度为26.6±0.27 ℃, 500 m的平均值为24.7±0.94 ℃(10:30—12:40)。在300 m和500 m高度巡航时, 其温度标准偏差相对较小, 尤其是300 m的温度偏离其平均值的程度较小。

|
|
| 图 4. 2008年7月18日无人机探测台风的温度变化图 Fig 4. The temperature variability of typhoon Kalmaegi observed by UAV on 18 July 2008 | |
从数据分析来看, 地面至300 m的平均温度梯度为-1.02 ℃/100 m, 300~500 m的平均温度梯度为-0.46 ℃/100 m, 从这两段数据结果来看, 近地面温度随高度变化较大, 其温度递减速度较快。从温度曲线变化的总体趋势来看, 无人机在500 m高度巡航时 (10:30—12:40), 其探测的环境温度随时间降低。因此, 随着时间的推移, 飞机逐渐向台风中心靠近, 其温度呈明显下降趋势。
图 5为0~300 m和300~500 m两段爬升过程中温度随高度的变化曲线。从两段爬升曲线来看, 温度随高度的增加呈现明显的反相关, 0~300 m阶段, 其相关系数达到了0.85; 300~500 m段, 其相关系数达到了0.92。低空的温度受下垫面环境的影响更大, 因而低空阶段的温度随高度变化没有高空阶段明显。

|
|
| 图 5. 0~300 m及300~500 m爬升状态下的温度变化 Fig 5. The temperature variability during the UAV climbing from the ground to 300 meters high and from 300 to 500 meters high | |
3.3 相对湿度及风速资料分析
图 6a为7月18日无人机探测台风的相对湿度变化图。从图 6a中可以看出, 飞行探测时段内, 相对湿度较大, 而且在探测过程中, 起降场地出现4次阵性降水, 且降水量较大。该时段内, 相对湿度的平均值为88.6±6.1%, 最大值为100%, 最小值为73.3%。从图 6a可以看出, 12:04—13:04相对湿度都超过了95%, 多处达到了100%, 而且距离台风中心越近, 其相对湿度越高, 飞机返航时, 其相对湿度达到了100%。此后, 随时间推移, 相对湿度逐渐降低。可以推断出, 在相对湿度较大的区域内, 飞机在降水区内飞行, 说明飞机的整体防水性能较好, 能够在降水天气下进行较长时间飞行。

|
|
| 图 6. 2008年7月18日无人机探测台风的相对湿度 (a) 及风速 (b) 变化 Fig 6. The relative humidity (a) and wind speed (b) variability of typhoon Kalmaegi observed by UAV on 18 July 2008 | |
图 6b为7月18日无人机探测台风的风速变化图。探测时段内, 风速最大值为22.3 m/s, 平均值为15.1±3.4 m/s。地面至300 m风速平均值为8.1 m/s, 在300 m巡航过程中, 其平均值为9.9 m/s, 500 m的风速平均值为15.7 m/s, 下降至300 m的风速平均值为11.6 m/s, 可以看出从地面至500 m高空, 其风速逐渐增大。从图 6b可以看出, 无人机在最远航点处, 即无人机开始返航时 (12:40), 其平均风速达到极值, 此前及此后的风速值都相对较低, 说明无人机起飞后, 远离陆地, 逐渐向海洋上空飞行, 距离台风中心越来越近。从图 1来看, 无人机到达的最远航点是距离台风中心最近的位置, 因此风速较大, 当无人机返航后, 距离台风中心越来越远, 因此风速也逐渐变小。12:40 — 13:00, 其风速逐渐减小; 13:04, 其平均风速再次达到了极值, 可能是受到台风外围环流场的影响。
4 结论1)2008年7月18日对台风海鸥的探测是中国气象局第1次利用无人机获取台风内部气象要素资料, 同时无人机安全回收的成功探测。说明可以利用无人机对台风等恶劣天气进行气象要素探测。
2) 获取的温度、气压、相对湿度、风向、风速及海拔高度等气象要素数据, 反映了台风的一些基本特征:距离台风中心越近, 气压越低, 并且有明显气压扰动; 地面到300 m的平均温度梯度为-1.02 ℃ /100 m, 300~500 m的平均温度梯度为-0.46 ℃ /100 m, 近地面的温度随高度变化较大, 其温度递减较快; 探测时段内, 风速最大值为22.3 m/s, 平均值为15.1 m/s, 距离台风中心越近, 风速越大。
致谢 感谢中国气象科学研究院陈联寿院士为无人机台风探测工作给予的科学指导; 感谢国家气象中心端义宏研究员、钱传海研究员为无人机台风探测作业区选择提供天气指导; 感谢北京东恒宇技术开发中心为本次台风探测工作提供了无人机设备。| [1] | Jorgensen D P, Mesoscale and convective-scale characteristics of mature hurricanes.Part Ⅰ :General observations by research aircraft. J Atmos Sci, 1984, 41: 1267–1285. |
| [2] | http:∥www.eol.ucar.edu/rtf/facilities/dropsonde. |
| [3] | Franklin J L, Black M, Valde K, GPS dropwindsonde wind profiles in hurricanes and their operational implications. Wea Forecasting, 2003, 18: 32–44. DOI:10.1175/1520-0434(2003)018<0032:GDWPIH>2.0.CO;2 |
| [4] | Rogers R, Coauthors, The intensity forecasting experiment:A NOAA multiyear field program for improving tropical cyclone intensity forecasts. Bull Amer Meteor Soc, 2006, 87: 1523–1537. DOI:10.1175/BAMS-87-11-1523 |
| [5] | http:∥www.noaanews.noaa.gov. |
| [6] | Holland G J, Tropical cyclone reconnaissance using aerosonde UAV. WMO Bull, 2002, 51: 235–246. |
| [7] | May P T, Holland G J, The role of potential vorticity generation in tropical cyclone rainbands. J Atmos Sci, 1999, 56: 1224–1228. DOI:10.1175/1520-0469(1999)056<1224:TROPVG>2.0.CO;2 |
| [8] | Powell M D, Boundary-layer structure and dynamics in outer hurricane rainbands.Part Ⅱ :Downdraft modification and mixed layer recovery. Mon Wea Rev, 1990, 118: 918–938. DOI:10.1175/1520-0493(1990)118<0918:BLSADI>2.0.CO;2 |
| [9] | http:∥www.aerosonde.com. |
| [10] | Moteki Qoosaku, Ryuichi Shirooka, Kunio Yoneyama, et al. The Impact of the Assimilation of Dropsonde Observations during PALAU2005 in ALERA. SOLA, 2007, 3: 97–100. DOI:10.2151/sola.2007-025 |
| [11] | Lin P H, Lee C S, Yen T C, et al.Flying into Typhoon Haiyan with UAV Aerosonde.Preprints, 12th Symp on Meteorological Observations and Instrumentation.Long Beach, CA, Amer Meteor Soc, 2003: 1-5. |
| [12] | Lin Pohsiung, Lee Chengshang, The eyewall-penetration reconnaissance observation of typhoon Longwang (2005) with Unmanned Aerial Vehicle, Aerosonde. J Atmos Ocean Technol, 2008: 15–25. DOI:10.1175/2007jtecha914.1 |
| [13] | 马舒庆, 汪改, 潘毅. 微型无人驾驶飞机探空初步试验研究. 南京气象学院学报, 1997, 20, (2): 171–177. |
| [14] | 马舒庆, 汪改, 潘毅, 等. 微型探空飞机解析测风方法. 大气科学, 1999, 23, (3): 377–384. |
| [15] | 马舒庆, 郑国光, 汪改, 等. 一种人工影响天气微型无人驾驶飞机及初步试验. 地球科学进展, 2006, 21, (5): 545–550. |