 2009, 20 (02): 195-202
2009, 20 (02): 195-202


2. 中国气象局气象探测中心, 北京 100081
2. CMA Meteorological Observation Center, Beijing 100081
GPS探空测风是新一代高空探测手段它运用GPS定位技术来测量风向和风速。GPS探空技术以它优越的定位精度以及几乎不受天气条件限制的特点成为未来高空探测系统的方向。目前国际探空界已普遍肯定定位型GPS探空仪的优良性能。2005年2月7-25日,世界气象组织(WMO)在毛里求斯举行了有芬兰、日本、美国、法国、德国、瑞士6家厂商生产的探空系统参加气象探空国际对比试验,检验GPS测风的精度和有效性[1]。对比结果表明:从地面至36km高空,参比的6个定位型GPS探空仪测定的高度差值都在±20m以内。在100hPa高度以上GPS的测高和测压性能都优于参比的高质量探空仪的气压传感器,在100hPa高度以下也不低于气压传感器[2-3],所有的GPS探空仪系统均得出了较高质量的风测量结果,而且具有良好的可获取性,很少丢失数据。参加对比的6套探空系统都采用GPS技术测风,代表了探空系统测风技术的发展方向。
目前,L波段雷达-数字探空仪系统刚推广到我国80多个高空站。与使用四十多年的59型探空仪-701雷达系统相比,数据采集率、准确度和系统自动化程度及可靠性都有显著提高[4]。WMO公布的2004年探空仪测量精度表明,我国L波段电子探空仪测量精度比59型机械电码式探空仪显著提高,与芬兰Vaisala公司的RS-80型探空仪测量精度相当。我国高空台站分布广、站点多,由于GPS探空仪造价较高,投资力度有限,不可能对探测系统进行频繁的换型工作,因此目前高空台站已推广的L波段雷达-数字探空仪系统在很长时间内还将使用。但L波段雷达-数字探空仪系统测风数据精度与定位型GPS探空仪测风精度差值,以及该系统的发展潜力,都是当前高空探测系统发展的主要研究课题之一。
长期以来,国际高空探测领域为了提高全球探空精度和一致性,一直计划研制一种标准探空仪,但由于高空探测的复杂性,未能产生广泛认同的标准探空仪[5]。各种探空系统国际对比仍然是提高全球探空探测精度和一致性的主要手段。L波段雷达-数字探空系统在试验考核过程中,曾与59-701系统和芬兰RS-80型GPS探空仪[6-7]进行过对比施放,由于频率干扰、时间同步不严格、数据处理方法不相同等种种原因,取得的只是粗略的测风对比结果。为解决这一问题,研制了新型的GPS探空系统,该系统对现有的L波段雷达-数字探空仪系统进行改进,其探空部分在原L波段数字探空仪上增加了GPS定位数据接收模块,以接收GPS定位信息;地面接收部分是在L波段雷达上引出一路信号连接GPS地面接收机。因此探空仪的无线电信号既可以用L波段雷达接收,也可以同时用GPS接收设备接收,以确保两套接收系统能达到时间同步。由于时间同步精确,同时对两套原始跟踪数据的处理计算方法一致,可以比较深入、客观地揭示出两个定位跟踪系统之间更具说服力的本质差异和在实际探空业务中的可比性。
2006年5月下旬到6月上旬,在上海和南京站相继用L波段雷达跟踪施放了23个配L波段雷达的定位型GPS探空仪。本文对这23份施放记录进行分析研究,并取得比较深入的对比结果。首先从GPS探空仪的每秒1组原始定位数据的有效分辨率以及探空仪沿着螺旋线轨迹上升这一特殊现象着手,探讨对原始数据进行合理平滑的方法及高空风更好的计算处理方法,然后对由这两种不同定位方法取得的高空风廓线进行比较。
1 L波段雷达测风与GPS测风原理比较L波段雷达为二次测风雷达,通过对探空仪进行连续的空间三维坐标定位获得目标的斜距、仰角、方位角和时间4个参数,再根据时间相关性计算出探空气球的水平移动速度和方向,等效为相应高度上的大气水平风速和风向,从而得到风速、风向垂直分布。斜距的测量对测风精度影响大,低仰角下测风精度低[8]。雷达定位精度与目标离测站距离关系很大。
用GPS技术测速有两种方式:一种是测多普勒频移方式,这种方式测量GPS卫星发出的信号到达探空仪时,由于探空仪与GPS卫星的相对运动而产生的多普勒频移,并由此计算风向风速;另一种为定位方式,GPS系统采用扩频通信技术,测量GPS卫星到接收机的距离(伪距),卫星位置(即轨道)是已知的,可列出方程:

|
(1) |
式(1)中,Xi, Yi, Zi为第i颗卫星坐标, Ri是t时刻第i颗卫星到接收机的距离。只要有3颗卫星就能计算出接收机所在的位置。但在实际应用中,由于接收机时钟与卫星上时钟的偏差,常常用4颗或4颗以上卫星资料计算探空仪在特定坐标系中的坐标,即定位。然后通过探空仪位置的变化计算风向风速。定位精度与目标离测站距离关系甚小。
Vaisala公司早期探空仪产品RS-80型GPS探空仪采用测多普勒频移方式测风,RS-80型最大问题是测风数据丢失率高。2005年参与毛里求斯国际比对试验的探空仪系统均采用定位方式进行测风,有很高的测风数据获取率。GPS是全天候全球导航定位系统,将它用于高空气象探测具有测量精度高、地面系统结构简单、自动化程度高等优点[9-11]。
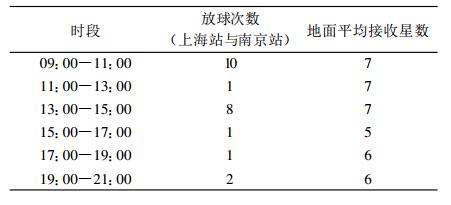
2 对比结果2006年5月下旬到6月上旬,在上海和南京站相继用L波段雷达跟踪施放了23个自行研制的配L波段雷达的定位型GPS探空仪。GPS探空仪的温、压、湿和经纬度、高度等数据经L波段雷达接收并由相应的处理软件处理[12]。同时L波段雷达按单测风方式跟踪接收处理雷达定位数据和风。为了检验GPS在不同时间、地点的定位性能,在上海站获得施放记录8份,南京站获得施放记录15份,按具体施放时间和GPS地面接收星数进行统计,详见表 1。试验证明自行研制的探空仪在地面星况接收情况良好,且在施放过程中能够一直保持8颗以上的使用星数,GPS定位性能很稳定,在不同时间(09:00-21:00,北京时,下同)、不同地点(上海、南京)没有明显差异。虽然雷达和GPS的定位方法完全不同,但通过对这两套原始定位数据及其按相同处理方法处理后的平滑数据分析比较发现,这两套系统彼此非常有效地进行了多方面的动态性能检验。
|
|
表 1 不同时间段 GPS 定位能力 Table 1 GPS orientation in different time period |
2.1 L波段雷达和GPS探空仪定位精度比较 2.1.1 L波段雷达和GPS探空仪测距精度比较
在气球法常规高空观测业务中,高空风是用探空仪在相邻时刻的水平位置变化量来计算的[13]。图 1与图 2分别显示的是探空仪施放前期与施放55min后GPS与L波段雷达提供的经向距离、纬向距离和高度原始数据随时间变化的情况,数据都用相对变化量表示。通过对23份完整的施放记录统计分析可以看到,施放前期与后期,GPS探空仪提供的每秒1组原始数据的变化都比较平滑,能清晰地反映出探空仪来回摆动的细节,高度精度可以达到1m左右相对定位精度。从图 1b可以看到,雷达在前期提供的原始数据变化还比较平滑,但没有GPS探空仪获得的定位数据光滑。而图 2b显示的施放后期雷达数据已很难反映出探空仪来回摆动的情况,而且测距数据来回跳变情况比较显著。

|
|
| 图 1. 施放后30 s原始定位数据随时间变化 (a) GPS 探空仪, (b)L 波段雷达 Fig 1. Temporal variations of original positioning data just 30 seconds after setting free (a)GPS radiosonde, (b)L-band radar | |

|
|
| 图 2. 施放 55 min 后原始定位数据随时间变化 (a) GPS 探空仪, (b)L 波段雷达 Fig 2. Temporal variations of original positioning data just 55 minutes after setting free (a)GPS radiosonde, (b)L-band radar | |
2.1.2 L波段雷达和GPS探空仪空间定位高度差分析
L波段雷达的测角精度指标(偏离系统偏差的标准偏差)为0.08°,测距精度指标为20m。但在实际测量中,由于单站雷达都存在水平、方位标定以及测距零点标定等系统误差,同时雷达测角数据受多路传播影响,在仰角较低时雷达角度测量数据也会出现起伏性偏差,仰角越低,起伏越大[14],其定位精度远远低于标定值。而GPS定位系统的高度定位精度能达到米量级,因此,不论是从原理还是从实测对比结果看,GPS定位数据优势明显,特别是在探空仪飞离测站较远时,雷达的差距更加明显。目前已公认定位型GPS探空仪的测高准确度最高,越到高空,越到远距离时相对准确度越高。基于这点认识,本文以GPS探空仪测得的高度作为相对标准,在南京站、上海站进行对比试验以检验L波段雷达测高的准确度,表 2给出了相关数据。
|
|
表 2 南京站 、上海站雷达在不同等压面高度差比较 Table 2 Comparison of height difference at different pressure surface of Nanjing and Shanghai radars |
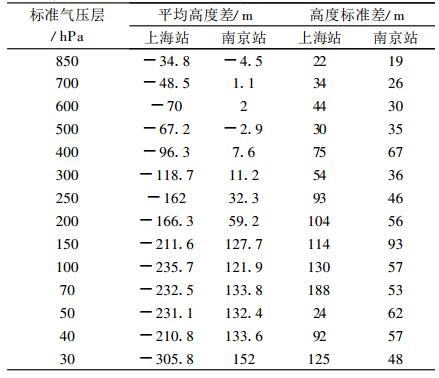
从表 2可以看出:上海站雷达探测高度与GPS探空仪测定高度相比偏低,而且仰角越低,高度差越大,高度差起伏也越大;南京站雷达探测的高度与GPS探空仪测定的高度相比偏高,同时也存在仰角越低,高度差越大,高度差起伏也越大的趋势。目前L波段雷达在台站作为测风使用,没有强调测高精度,因此水平标定精度不够高,测高误差较大。
2.2 L 波段雷达和GPS探空仪测风精度比较GPS探空仪定位精度比较高,能探测到探空仪在升空过程中随气球摆动的情况,为此需进行平滑处理以消除摆动引起的虚假风。但处理后保留下来的高空风结构是否真实可靠,一直没有见到检验旁证。参与毛里求斯对比的各个GPS探空仪之间可能由于时间同步和对GPS探空仪获得的原始数据的平滑计算方法不同,也没能进一步提供这方面的检验信息。
所以从L波段雷达和GPS探空仪的每秒1组原始定位数据的有效分辨率以及探空仪沿着螺旋线轨迹上升这一特殊现象着手,探讨对原始数据进行合理平滑的方法及高空风更好的计算处理方法,然后再对由这两种不同定位方法取得的两条高空风廓线进行实质性比较[15]。
2.2.1 L波段雷达与GPS探空仪获得的风数据采用不同滑动平均方法效果比较图 3为2006年5月27日1400上海站的施放记录。从图 3中可以看出由于GPS探空仪的相对定位精度比较高,即直接采用相邻两点(即用1s间隔)原始数据计算每秒风向,结果能清晰地体现探空仪沿螺旋线轨迹上升引起的来回摆动。但由于雷达定位相对精度不够高,需要对原始数据进行适当平滑。图 3中的L波段雷达定位数据是经过3点滑动平均后获得的每秒风向(图中只提供了低空和150hPa附近高空的情况)。可以看到,在低空,雷达数据经过3点滑动平均后能够和没有进行滑动平均的GPS定位数据比较同步一致地显示出风向由于探空仪沿螺旋线轨迹上升引起的来回摆动。这说明L波段雷达的定位精度较GPS探空仪低,但也能测定探空仪沿螺旋线轨迹上升引起的风廓线的来回摆动。到150hPa(约14km)附近高空,由于雷达定位精度不够高,雷达测定的探空仪摆动被放大变形。GPS探空仪未经平滑处理的风速数据与L波段雷达3点平滑后的风速数据比较存在着同样情况(图略)。

|
|
| 图 3. 2006年5月27日14:00上海站 L 波段雷达经过3点滑动平均处理的风向数据和GPS探空仪测得未滑动平均处理的风向数据比较(a)低空, (b)高空 Fig 3. Comparison of 3-point smoothing wind direction of L-band radar and GPS radiosonde wind direction without smoothing at 14:00 on May 27, 2006 of Shanghai (a)bottom air, (b)superior air | |
2.2.2 平滑处理后的GPS探空仪风数据与GPS探空仪获得的下降记录比较
为了考察通过滑动平均计算得到的高空风廓线真实性,首先与气球炸裂后取得的下降记录进行比较。气球炸裂有时不会破裂成小碎片,由于大片气球皮的阻尼作用,探空仪下降速度受到抑制,下降姿态平稳,信号良好,接收设备有时能采集到直到探空仪接近地平线高度的原始数据。试验中,共接收到16份完整下降记录。探空仪的下降速度为30~40m/s,16份完整的下降记录表明在探空仪下降姿态稳定的情况下,GPS探空仪工作状态良好。这充分说明GPS定位模块对速度和加速度的适应性完全满足探空仪工作条件的要求,而且下降过程中获取的风廓线没有来回摆动的现象,因此获取的风数据更接近于真实风。为了检验对GPS探空仪测得经滑动平均处理的GPS探空仪下降记录进行相关性检验,给出了两者的平均相关系数,风速的相关系数为0.99,风向的相关系数为0.80,达到99%置信度水平。图 4显示的是某一高度(500~250hPa)经30点滑动平均后的GPS探空仪风廓线与未经滑动平均的GPS探空仪下降记录的比较。可以看到,虽然上升和下降记录测量的时间地点有些差异,但取得的风廓线结构基本一致(探空仪在高空下降速度快,气压反应滞后,在以气压为纵坐标的图 5中造成风结构错位)。这说明GPS探空仪在上升过程中测得的风数据经30点滑动平均后风廓线结构是真实可靠的,而且在时间、空间上具有一定的代表性。

|
|
| 图 4. GPS探空仪上升下降过程中获得的风记录(a)风向, (b)风速 Fig 4. Rise-and-fall wind record of GPS radiosonde(a)wind direction, (b)wind velocity | |

|
|
| 图 5. 2006年5月27日14 : 00 上海站低仰角施放气球时经过 30 点滑动平均后的风廓线比较(a)风向, (b)风速 Fig 5. Comparison on 30-point smoothing wind profile of L-band radar and GPS radio sonde at low elevation at 14:00 on May 27, 2006 of Shanghai (a)wind direction, (b)wind velocity | |
2.2.3 平滑处理后L波段雷达测风与使用GPS技术测风比较
为了考察GPS探空仪获得的高空风经过滑动平均处理后数据的有效性,将其与L波段雷达风廓线进行比较。GPS探空仪与L波段雷达风速和风向数据的平均相关系数,低空风速为0.99,低空风向为0.99;中空风速为0.91,中空风向为0.73;高空风速为0.79,高空风向为0.42,达到99%置信度水平。这表明经过30点滑动平均后,L波段雷达和GPS探空仪获得的风向、风速上升曲线都不再出现频繁的来回摆动,而是保留了非常一致的较大范围内起伏。两个独立测风系统经30点平滑后上升曲线基本一致,表明这样的风速、风向特性曲线是真实可靠的。同时也说明虽然GPS探空系统的测量精度比较高,但需要消除探空仪摆动造成的虚假风速、风向摆动,L波段雷达测量精度较GPS定位系统低,但在气球探空这一特殊测风业务中也能分辨出GPS探空仪获得的较细微的高空风廓线。
在低仰角、远距离(此时探空仪一般也到达了高层小风速区)情况下,雷达测角数据受多路传播影响发生起伏,仰角越低,距离越远,计算出的风向、风速来回摆动越大[16]。图 5为2006年5月27日14:00上海站的放球记录,全程最大仰角为23.60°,最低仰角为6.51°,斜距为137.69km,该记录中GPS探空仪与L波段雷达风速和风向数据的相关分析表明,100hPa高度以下风速相关系数为0.99,风向相关系数为0.89;100hPa高度以上风速相关系数为0.65,风向相关系数为0.49,达到99%的置信度水平。但由图 5以及相关系数数据可以看出,在100hPa以上高空(一般在施放40min以后)雷达原始定位数据用30点滑动平均处理不能消除由自身定位误差带来的影响,应适当提高雷达原始数据的平滑程度。
经过各种情况比较后,比较折中的方法是:气球施放1~20min后L波段雷达采用30点(相当于30s)滑动平均;气球施放20~40min后采用60点滑动平均,气球施放40min后采用120点滑动平均。考虑到在高空小风速区保留太多的由于气球摆动造成的风向波动无太多实用价值,GPS探空仪测得的风也可以适当提高平滑程度,例如在气球施放1~40min后采用30点滑动平均,40min后采用60点滑动平均。这样L波段雷达与GPS探空仪测得的风有较好的可比性(图 6)。

|
|
| 图 6. 用比较折中的滑动平均方法获得的高空风廓线 (a)风向, (b)风速 Fig 6. Wind profile of L-band radar and GPS radiosonde smoothed by suitable method (a)wind direction, (b)wind velocity | |
目前台站业务上使用的L波段雷达-数字探空仪系统的计算方法是每整分钟取前后5点平均;气球施放1~20min后采用1min间隔的5点平均值计算量得风层风,气球施放21~40min后采用前后2min间隔的5点平均值计算量得风层风,40min后采用前后4min间隔的5点平均值计算量得风层风,每分钟只计算1个风向、风速。也就是说,雷达的原始数据只使用了1/12,由于平滑过度,忽略了较细微的高空风情况。上述分析结果表明:如果充分利用雷达原始秒量级定位数据,适当减小计算高空风的时间间隔,L波段雷达-数字探空仪系统能够提供接近GPS探空仪测风精度的高空风资料。
3 小结23份配备GPS定位功能的L波段雷达-数字探空仪的施放结果表明:
1)GPS探空仪的动态相对定位精度达到米量级,能测出探空仪在螺旋形上升过程中引起的风向、风速来回摆动的细节。L波段雷达动态相对定位精度达不到米量级,但经过3点滑动平均后也能测出来回摆动的细节。
2)为了消除探空仪沿螺旋线上升引起的风向、风速来回摆动,获得大气中比较接近真实情况的风,GPS探空仪获得的原始定位数据必须进行一定范围的平滑。具体试验计算表明:100hPa高度以下,该原始数据使用30点滑动平均,100hPa高度以上,使用60点滑动平均。
3)在雷达仰角不太低、探空仪离测站不太远的情况下,同样经过30点(相当于30s间隔)滑动平均消除风向、风速来回摆动的细节后,L波段雷达和GPS探空仪测风数据可以得到一致结果,表明对一定时间尺度的风现象,L波段雷达测风是可以取得较好结果的。但在探空仪上升到高空小风速区且远离测站时,需要对L波段雷达原始数据进行更大范围的平滑处理。
4)虽然L波段-雷达定位精度较GPS定位系统低,但利用L波段雷达原始秒量级定位数据,经过相应的风数据处理,在气球测风这一特殊领域里其测风性能是可以达到接近GPS定位测风的水平。
致谢: 本文探空资料获取得到了上海宝山探空站、南京小校场探空站大力协助。在本文完成过程中,上海长望气象科技有限公司GPS探空仪研究组成员李吉明、金波、方佳言、施东明以及南京大桥机器厂L波段雷达专家严德山为本文提供了有益修改意见,特此致谢!| [1] | 李峰, 马舒庆. 从毛里求斯国际对比看全球探空系统发展趋势. 气象科技, 2006, 34, (5): 606–610. |
| [2] | Li F. New Developments with Upper-air Sounding in China. Instruments and Observing Methods Report No.94, WMO/TD-No. 1354, Paper 2(1) . Geneva : WMO, 2006 . |
| [3] | Pathack B, Nash J, Smout R, et al. WMO Intercomparison of High Quality Radiosonde Systems. Instruments and Observing Methods Report No.94, WMO/TD-No. 1354 : 19(6). Geneva :WMO, 2006 . |
| [4] | Guo Yatian, Huang Bingxun.Correction for Bias of Chinese Upper-air Measurements. Commission For Instruments and Mehtods of Observation, Geneva: WMO, 2004. |
| [5] | 马舒庆, 赵志强, 邢毅. Vaisala探空技术及中国探空技术的发展. 气象科技, 2005, 33, (4): 390–393. |
| [6] | Reinaldo B da Silveira, Gilberto Fisch, Luiz A T Machado, et al . Executive Summary of the WMO Intercomparison of GPS Radiosondes. Instruments and Observing Methods Report No.76, WMO/TD-No. 1153: 3-5 . Geneva: WMO, 2003 . |
| [7] | 中芬高空探测对比试验技术组. 中芬高空探测对比试验结果分析报告. 气象软科学, 1997, (增刊): 38–49. |
| [8] | 姚琪. 新型L波段二次测风雷达系统测量精度分析. 现代雷达, 2006, 28, (11): 22–24. |
| [9] | 秦晓军. GPS技术在气象探空测风中的应用. 陕西气象, 2006, 3: 29–30. |
| [10] | 陈世范. GPS气象观测应用的研究进展与展望. 气象学报, 1999, 57, (2): 242–252. |
| [11] | 李国平, 黄丁发. GPS气象学研究及应用的进展与前景. 气象科学, 2005, 25, (6): 652–660. |
| [12] | 姚雯, 郑国光, 郭亚田, 等. 气象探空测风软件系统的标准化研究. 应用气象学报, 2004, 15, (1): 88–94. |
| [13] | 张霭琛. 现代气象观测. 北京: 北京大学出版社, 2000: 310-315. |
| [14] | 刘咏, 孙庆国, 迟海艳. 高空气象探测系统数据处理与误差分析. 气象水文海洋仪器, 2007, 2: 1–5. |
| [15] | 黄炳勋. C-波段测风一次雷达的跟踪特性及其应用前景. 应用气象学报, 1995, 6, (2): 153–162. |
| [16] | 张立功, 陈志斌, 王勇, 等. L波段雷达-电子探空仪系统对比观测分析. 气象科技, 2007, 35, (1): 123–125. |