 2008, 19 (3): 356-361
2008, 19 (3): 356-361


2. 北京市气象局, 北京 100089
2. Beijing Municipal Meteorological Bureau, Beijing 100089
探空仪获取的高空温、压、湿资料是了解和预报天气、气候变化极其重要的数据, 探空资料的准确性直接影响天气形势和天气系统的分析和预报。为了提高高空大气探测数据准确度, 我国从2002年1月开始推广使用L波段雷达-电子探空仪探测系统。全国124个高空探测站中现有80个站使用L波段雷达-电子探空仪探测系统。其数据采集率、准确度和系统自动化程度及可靠性都有显著提高。WMO最新公布2004年探空仪测量精度表明, 我国L波段电子探空仪测量精度比59型机械电码式探空仪显著提高, 与美国正在使用的芬兰Vaisala公司的RS80探空仪测量精度相当[1]。新探空仪使用的湿度敏感元件是参照美国研制的碳湿敏电阻, 与老探空仪使用的肠膜敏感元件相比, 灵敏度高, 滞后小, 在高空低温期间响应快, 测量准确度高[2]。此外, 该元件校准线一致性好, 不需逐一校准, 节省了生产成本[3-5]。但该元件有较大温度系数, 订正不准确就会影响测量精度。虽然国外对碳湿敏元件的性能已有相当深入的研究, 然而针对元件特性进行的相对湿度误差订正的效果并不理想[6-7]。由于高空观测的复杂性, 国际上未能产生广泛认同的标准探空仪可供试验验证。目前我国高空探测站每天接收到的相对湿度探空数据, 是经过探空仪生产厂家根据初步的试验数据并参考国外情况订正后的相对湿度数据。由于目前主要还是依靠厂家的力量来对探空仪的传感器进行研究[8], 探空仪生产厂家的相对湿度订正公式是否合理, 订正效果如何, 都需要进行客观的分析检验。大量实际施放结果表明:相对湿度探空曲线仍然存在较大误差, 云内相对湿度数据不稳定, 随高度增高明显下降, 这样直接影响到云层位置的判断, 从而降低了温度探测和位势高度计算准确度。数值试验结果也表明:探空资料的精度对高分辨率数值预报模式的预报结果有一定程度的影响[9]。中国气象科学研究院大气探测研究所曾对配C波段雷达的电子探空仪探索过用实测的温、压、湿廓线判定云底云顶高度的方法。目前已经在高空站广泛推广应用的L波段电子探空仪系统也沿用了C波段电子探空仪的这一判云方法。但是L波段电子探空仪的湿度元件生产工艺和误差订正方法与C波段探空仪有较大差别, 需要重新进行有针对性的研究。
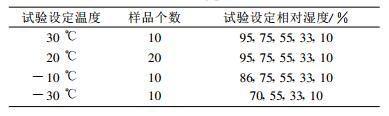
1 碳湿敏电阻静态性能测试结果分析静态试验中所用的温度湿度控制设备是SBS-3型双压法标准湿度发生器, 随机抽取同一批次一定数目的碳湿敏元件, 在试验设备允许的范围内设定试验温度 (-30~30 ℃) 和相对湿度 (10%~95%), 测试不同温度下碳湿敏元件的感湿特性。测试过程中试验设备设定的温度及相对湿度值见表 1。
|
|
表 1 测试过程中试验设备设定的温度及相对湿度值 Table 1 Temperature and relative humidity values set in the testing process |
1.1 碳湿敏电阻的灵敏度
大量测试结果表明, 碳湿敏电阻的电阻-相对湿度 (R-RH) 校准线的灵敏度分布很不均匀, 在高湿高阻时灵敏度很高。阻值变化范围从低湿段的103Ω变化到高湿段106Ω, 元件阻值相差几百倍。为了提高线性度减小高湿端的灵敏度, 也为了避免大阻值的测量误差, 探空仪生产厂家在湿敏电阻测量电路上并联了一个1 MΩ的固定电阻, 便于高湿端的测量。
1.2 碳湿敏电阻校准线的一致性为提高校准线的一致性和简化生产工艺, 国内外都采用比阻校准线方法, 即用某一相对湿度下测定的每个元件的阻值作为该元件的基点值, 再用与基点值的比值画校准线。美国VIZ公司采用在25 ℃、相对湿度为33%时元件的阻值为其基准阻值。我国探空仪生产厂家参考芬兰Vaisala公司方法将20 ℃、相对湿度为0时元件的阻值为其基准阻值。分析表明, 20个同一批元件的校准线一致性较好 (图略), 因此国内外都使用同一批产品的平均校准线作为公共校准线。需要说明的是为了提高校准线线性度, 在绘制比阻校准曲线时纵坐标采用扩大10倍的比电阻值的双对数ln (ln (R/R0×10)/ln10)/ln10表示, 其中R为湿敏电阻的阻值, R0为相对湿度为0时的电阻值 (基点电阻值)。
1.3 碳湿敏电阻校准线的温度系数图 1为在新校准设备中通过试验得到的不同温度下校准曲线。由于测试设备相对湿度无法稳定地控制在100%, 实际测试的高湿点在正温情况下为95%, 在负温情况下对冰面而言也是95%, 但换算到水面时小于95%。工厂提供的校准线都是对水面的。需要说明的是:高精度湿度校准设备温度测试范围在-30~30 ℃, -30 ℃条件下测试很困难, 特别是在低湿段, 需要花费很长时间, 并且相对湿度为0时的阻值是在干燥剂中测得的, 通过试验数据分析发现-30 ℃时相对湿度为0的基点阻值测量结果偏大导致比阻曲线变化规律与其他曲线差异较大。因此本文未给出-30 ℃线。

|
|
| 图 1. 新校准设备中试验得到碳湿敏电阻在不同温度条件下的校准曲线 Fig 1. The calibrating curves at different temperatures measured by new test equipment | |
作为比较, 图 2是按美国气象局[10]公布的公式计算得到的校准曲线随温度变化情况。需要说明的是美国元件没有并联1 MΩ电阻, 基点电阻是相对湿度在33%时的阻值, 纵坐标为比阻的一次对数 (ln (R/R33)/ln10)。

|
|
| 图 2. 按美国气象局公布的公式计算得到碳湿敏电阻在不同温度条件下的校准曲线 Fig 2. The calibrating curves at different temperatures according to the formula provided by the United States Bureau of Meteorology | |
显然, 如果不考虑校准线表达方式的差异, 图 1与图 2元件的比阻-相对湿度曲线随温度变化的趋势基本相似, 即低湿端温度系数小, 高湿端温度系数大。由于元件在低湿段和高湿段不同温度下的比阻-相对湿度曲线差异较大, 因此进行碳湿敏电阻校准线温度系数订正 (特别是对高湿端的温度系数订正) 是有必要的。
1.4 碳湿敏电阻湿滞现象湿敏元件吸湿和脱湿的响应时间各不相同, 并且吸湿和脱湿的特性曲线也不相同, 称这一特性为湿滞现象。图 3为碳湿敏电阻在20 ℃和-5 ℃温度条件下的湿滞回线。试验结果表明:碳湿敏元件湿滞现象随温度降低而变得显著[11], 在低温条件下, 元件的降湿比阻-相对湿度感湿特性曲线与升湿比阻-相对湿度感湿特性曲线差异较大, 同一比阻值对应降湿感湿特性曲线得到的相对湿度值比对应升湿感湿特性曲线的相对湿度值偏低。

|
|
| 图 3. 碳湿敏电阻在不同温度下的湿滞回线 Fig 3. The humidity lag loop line of carbon-film hygristor at different temperatures | |
2 碳湿敏电阻校准线温度系数订正方法
探空仪生产厂家根据初期采用简单的测试方法得到的结果并参考美国订正方法推断其湿敏电阻测定的相对湿度的温度系数为一常数, 订正值正比于与20 ℃的温度差和20 ℃的相对湿度值 (以下简称方法A)。

|
(1) |
式 (1) 中, Ut为t ℃时的相对湿度; U20为20 ℃时的相对湿度。
按此方法得到不同温度条件下的校准线如图 4所示。

|
|
| 图 4. 方法A得到的湿敏电阻在不同温度下的校准曲线 (图中校准曲线从左到右对应的温度分别为-60 ℃, -50 ℃, -40 ℃, -30 ℃, -20 ℃, -10 ℃, 0 ℃, 10 ℃, 20 ℃, 30 ℃) Fig 4. Different temperature calibrating curves by method A (calibrating curve from left to right in the corresponding temperature of-60 ℃, -50 ℃, -40 ℃, -30 ℃, -20 ℃, -10 ℃, 0 ℃, 10 ℃, 20 ℃, 30 ℃) | |
图 4与图 1相比可以看出, 校准曲线在相对湿度为0处均趋于一点, 这与选用相对湿度为0时的元件阻值为其基准阻值的原理一致。在相对湿度接近饱和区订正过大。图 4与图 2的校准曲线在高湿端变化一致, 但由于图 2使用的碳湿敏元件测量电路并没有并联1 MΩ固定电阻, 而图 4中元件测量电路并联了1 MΩ固定电阻, 方法A忽略了该固定电阻的影响, 显然该订正公式存在问题, 并且从目前高空探测台站获得的大量L波段探空仪的相对湿度资料也表明, 工厂对云区相对湿度的订正效果不理想。水云包括其上部的过冷水云内的相对湿度都应接近100%。即使测量元件有系统误差, 达不到100%, 也应该是一个恒定值。但L波段的探空记录表明, 在一层很厚的云体内, 只要温度随高度降低, 经过工厂订正过的相对湿度也随高度明显减小, 因此利用现有探空系统的云层识别方法不能确切地判别云层位置高度。
为了能继续使用现有探空系统的云层识别方法判别云层的确切位置高度, 就必须纠正方法A订正公式的问题, 体现测量电路并联1 MΩ固定电阻的影响。为此本研究采取分两段订正的方法:在相对湿度低于85%时, 订正值按二次曲线递增, 高于85%左右时, 订正值按二次曲线递减, 至100%时, 降为0, 以下简称方法B。

|
(2) |
式 (2) 中, K=

根据方法B重新将试验数据进行计算, 新校准线随温度变化的趋势与试验测试结果基本一致, 见图 5。需要说明的是:新的高精度湿度校准设备试验温度范围为-30~30 ℃, 因此, -40 ℃甚至更低温度范围的校准曲线关系需要根据试验数据外延得到, 为了陛免温度系数订正过头, 根据实际施放记录, 将线性外延的关系改为订正量随温度下降递减的关系。

|
|
| 图 5. 方法B得到的不同温度下的校准曲线 (图中校准曲线从左到右对应的温度为-60 ℃, -50 ℃, -40 ℃, -30 ℃, -20 ℃, -10 ℃, 0 ℃, 10 ℃, 20 ℃, 30 ℃) Fig 5. Different temperature calibrating curve by method B (calibrating curve from left to right in the corresponding temperature of -60 ℃, -50 ℃, -40 ℃, -30 ℃, -20 ℃, -10 ℃, 0 ℃, 10 ℃, 20 ℃, 30 ℃) | |
3 用实测探空资料对新相对湿度订正方法的检验
为使订正公式尽可能适应探空仪的实际施放记录, 使水云 (包括过冷水云) 中的相对湿度保持恒值不变, 分析了2004-2006年全国各地白天以及夜间的探空实测记录, 并修正了由试验测试结果得到的二次订正公式中的系数。为了说明方法A的错误如何影响了云层位置的定位以及进一步影响温度元件辐射误差订正的情况[12-15]。以下以湖南省郴州站白天实测的探空曲线来说明方法B对现有的云层位置识别的订正效果。
湖南郴州站2004年6月6日07:18(北京时) 探空仪施放时根据台站记录当时地面目测云量为10/10, 云状为层积云。地面相对湿度为91%, 云底高度为521 m。从图 6相对湿度廓线可以明显的看出, 整个探空过程应该有两层云, 但是由于方法A相对湿度订正公式有误, 致使在接近饱和的高湿端订正过多, 导致云层很厚时上层水云的相对湿度明显小于下层水云的相对湿度, 利用目前的云识别方法, 只选中了下面的云层, 影响了正确判断云层顶、底的位置。经过方法B重新订正后, 相对湿度越接近饱和订正值越小, 相对湿度的垂直廓线能比较合理地对云层位置进行判断, 因此上下两部分云层都被选中, 从而能比较准确地判断水云的顶、底位置 (图 7), 进一步提高温度元件辐射误差的订正精度。

|
|
| 图 6. 郴州站采用方法A订正的相对湿度上升曲线判别到的云层 (a) 和辐射误差曲线 (b) Fig 6. Clouds discriminated by relative humidity curve corrected by method A (a) and radiation error curve (b) in Chenzhou | |

|
|
| 图 7. 郴州站采用方法 B 订正的相对湿度上升曲线判别到的云层(a)和辐射误差曲线(b) Fig 7. Clouds discriminated by relative humidity curve corrected by method B (a)and radiation error curve (b)in Chenzhou station | |
4 结论与讨论
本研究是针对目前已经推广的L波段探空仪系统, 主要利用探空仪生产厂家的高精度温湿测试设备, 通过不同温度、湿度下大量的静态测试, 对碳湿敏元件性能进行深入研究, 发现了探空仪生产厂家相对湿度订正公式 (方法A) 存在问题, 找出了更为有效的相对湿度探空数据的订正方法 (方法B)。通过研究得到以下几点结论:
1) 碳湿敏电阻比阻校准曲线的一致性很好, 因此可以使用公共校准曲线, 不需逐一校准。
2) 校准线的最大温度系数出现在60%~90%的高湿段, 在低湿段温度系数比较小。
3) 方法A没有考虑测量电路并联1 MΩ固定电阻的影响, 致使在接近饱和的高湿端订正过多, 导致云层很厚时上层水云的相对湿度明显小于下层水云的相对湿度, 影响正确判断云层顶、底的位置。方法B考虑了并联1 MΩ固定电阻的影响, 并通过实际施放记录修订了相关系数, 使得相对湿度越接近饱和订正值越小, 从而能比较准确地判断出水云的顶、底位置。
本文使用的判云方法是L波段系统实际已经应用的方法, 并非本文重新提出。本文试图揭示的是方法A订正公式的错误如何影响了云层位置的定位以及进一步影响温度元件辐射误差订正的情况。至于L波段探空仪目前还存在多大“湿滞回差”误差, 以及如何修正等问题, 还需要进一步探讨。
本文研究结果可用来改善高湿端相对湿度数据的准确度, 改善云层顶、底位置判断的准确度, 进一步提高温度元件辐射误差的订正精度, 使得L波段探空仪系统提供的探测资料更加准确可靠, 进一步满足各种高空观测资料用户的需求。
| [1] | 李峰, 马舒庆. 从毛里求斯国际对比看全球探空系统发展趋势. 气象科技, 2006, 34, (5): 606–610. |
| [2] | Li F. New Developments with Upper-air Sounding in China. Instruments and Observing Methods Report No.94, WMO/TD-No.1354.Geneva:WMO, 2006. |
| [3] | 姚玉琼, 姚倩, 钟志武.碳膜湿敏元件及其性能试验.气象科学技术集刊 (7)———大气探测试验研究.北京:气象出版社, 1985:10-15. |
| [4] | Miloshevich L M, Paukkunen A, Holger Vomel H, et al. Development and validation of a timelag correction for vaisala radiosonde humidity measurements. J Atmos Ocean Technol, 2004, 21, (9): 1305–1327. DOI:10.1175/1520-0426(2004)021<1305:DAVOAT>2.0.CO;2 |
| [5] | 李英干, 范金鹏. 湿度测量. 北京: 气象出版社, 1990: 311-325. |
| [6] | Reinaldo B da Silveira, Gilberto Fisch, Luiz A T Machado, et al. Executive Summary of the WMO Intercomparison of GPS Radiosondes. Instruments and Observing Methods Report No.76, WMO/TD-No 1153, Geneva:WMO, 2003:3-5. |
| [7] | Pathack B, Nash J, Smout R, et al. WMO Intercom parison of High Quality Radiosonde Systems. Instruments and Observing Methods Report No.94, WMO/TD-No 1354, Geneva:WMO, 2006. |
| [8] | 马舒庆, 赵志强, 邢毅. Vaisala探空技术及中国探空技术的发展. 气象科技, 2005, 33, (4): 390–393. |
| [9] | 刘红亚, 薛纪善, 沈桐立, 等. 探空气球漂移及其对数值预报影响的研究. 应用气象学报, 2005, 16, (4): 518–525. |
| [10] | http:∥www.ua.nws.noaa.gov/images/WMOmemo.htm. |
| [11] | 张霭琛. 现代气象观测. 北京: 北京大学出版社, 2000: 310-315. |
| [12] | 黄炳勋.GZZ-7型探空仪温度元件的辐射误差及滞后误差.气象科学技术集刊 (7)———大气探测试验研究.北京:气象出版社, 1985:1-8. |
| [13] | 郭亚田.有云大气中的长波辐射计算模式及其在探空中的应用.北京:中国气象科学研究院, 1988. |
| [14] | Guo Yatian, Huang Bingxun. Correction for Bias of Chinese Upper-air Measurements. Commission for Instruments and Mehtods of Observation, Geneva:WMO, 2004. |
| [15] | 姚雯, 郑国光, 黄炳勋, 等. 气象探空测风软件系统的标准化研究. 应用气象学报, 2004, 15, (1): 88–93. |