 2006, 17 (5): 635-642
2006, 17 (5): 635-642


2. 湖南省气象技术装备中心, 长沙 410007
2. Hunan Provincial Meteorological Technology Equipment Center, Changsha 410007
任何测量都存在误差, 准确度高的仪器测量误差小。任何仪器不经过计量, 其测量值就没有溯源关系, 使得测量数据不可信。气象计量工作的主旨就是通过对各等级气象计量器具进行检定, 得出修正值, 在使用时加上修正值, 使测量结果更加接近真值。只有对所使用的仪器, 在实际测量时加上修正值后, 才能使在不同地点、不同时间段内观测到的气象资料具有可比性。
中国气象局从国家“十五”计划开始, 在全国各台站装备多要素自动气象站, 逐步替代人工观测中的器测项目, 提高了观测数据的实效性和准确性。
到目前为止, 气象部门安装了4种型号 (CAWS600型, DYYZII, ZQZ-CII和MILOS500型) 的自动气象站, 这些自动站均按自动气象站的行业标准设计[1]。为使各种型号自动气象站观测数据准确、可靠并具有可比性, 必须使用统一的标准检定装置及方法进行周期检定。检定结果的可信度如何, 它有多大的不确定度, 是计量器具使用部门和技术监督部门进行仪器建标考核时经常涉及到的重要技术问题。本文以CAWS600型自动气象站作为被检测对象, 对各要素传感器的检定结果进行分析, 相信对其他气象计量仪器的检定结果进行误差分析也有指导意义。
1 不确定度分析思路 1.1 确定被测量和测量方法气象用传感器一般是全量程使用仪器, 因此在确定测量方法[2]时应包括:检定时检定点的选择、数据录取次数、数据处理方法、测量结果的不确定度分析、测量用标准器的准确度、测量用相关调节设备的技术指标等。本次检定依据自动气象站的室内检定规程进行。
1.2 建立相关数学模型建立满足测量不确定度评定所需的数学模型, 并找出所有影响测量不确定度[3-4]的输入量, 建立测量误差的数学模型, 其目的是建立满足测量所要求准确度的数学模型, 即被测量的误差和所有各输入量之间的函数关系。
|
(1) |
式 (1) 中, Xi为被检传感器示值平均; Xs为标准仪器示值平均。
1.3 确定各输入量的标准不确定度依据JJF1059-1999《测量不确定度评定与表示》规定, 区别各输入量的标准不确定度评定方法上的差异, 将标准不确定度的评定划分为A类评定和B类评定。
1.3.1 标准不确定度的A类评定根据一组检定数据, 利用贝塞尔公式计算一组检定数据 (测量误差) 的标准偏差s(xi):
|
(2) |
|
(3) |
式 (2) 和式 (3) 中, Δxi为第i次检定时的测量误差,


按照检定方法, 在对被检传感器进行检定时, 一般采用多点法, 每个检定点均进行n次检定 (n≥5), 由于存在一个检定点给出的修正值不能代替其他检定点, 因此多个检定点检定结果的A类标准不确定度, 用合并样本的标准差来表达更为科学、合理。表达式如式 (4) 所示:
|
(4) |
不确定度的B类评定, 一般是根据被检传感器以前的检定证书、技术文件所提供的检定数据 (修正值的不确定度)、准确度等级、误差限、被检传感器的环境适应性等特征逐项进行分析。
在进行B类不确定度分析时, 只有当各分量彼此相互独立 (不相关) 时, 才能进行B类标准不确定度uB合的合成, 按式 (5) 进行合成。

|
(5) |
用式 (6) 进行各类标准不确定度合成uc:
|
(6) |
根据被测量分布情况的不同、所要求的置信概率和对检定工作的具体要求不同, 分别采取不同方式确定包含因子k的大小。
1.6 确定扩展不确定度U合成标准不确定度与包含因子的乘积, 称为扩展不确定度U, 用式 (7) 表示:

|
(7) |
检定过程是在一个封闭的系统中进行的, 检定条件包括数字式压力仪, 测量范围为500~1100 hPa, 不确定度为0.02% FS (full scale), 调压器, 采集器及计算机数据系统。选择3个压力点进行检定, 每个检定点分别等间隔录取8次标准值和被检传感器的输出值, 用被检气压传感器的输出值减去标准值 (标准器的测量值加上相关压力点上修正值) 得出测量误差, 用式 (2) 和式 (3) 计算各检定点测量误差的算术平均值的标准偏差列入表 1。
|
|
表 1 被检压力传感器在不同压力点上的测量误差、算术平均值的标准偏差 |

用式 (4) 求出合并样本标准偏差为被检气压传感器的A类不确定度uA:

|
B类标准不确定度评定主要从标准器的修正值变化、采集器的数据处理误差、检定设备检定场的波动度和均匀度、环境条件影响等因素来考虑。其数据来源于有关技术资料和各种影响因素的统计和分析。针对气压传感器的检定, 主要考虑下列误差给检定结果带来的不确定度。
标准器的不确定度从标准器 (数字式气压仪) 的技术资料可知, 在500~1100 hPa的范围内, 给定的不确定度指标是0.01% FS, 在气压为1000 hPa时的极限误差ΔP=0.10 hPa, 由极限误差给测量结果带来的不确定度服从均匀分布, 取包含因子k=1.732, 则由标准器引起的标准不确定度uB1为:

|
采集器的不确定度 从自动气象站CAWS600-B采集器的技术资料中得知, 采集器的压力通道在测量范围为0~5 V时, 采集器在各压力点的绝对误差为±0.10 hPa, 由于采集器是定型产品, 因此各检定点对测量结果引起的误差服从于均匀分布规律, 取包含因子k=1.732, 则由采集器引起的标准不确定度uB2为:

|
计算机数据处理带来的修约误差检定中由计算机自动采集标准气压值, 计算机处理时最终保留1位小数。修约误差最大为0.05 hPa, 数据修约误差对各检定点的影响呈均匀分布, 取包含因子k=1.732, 则其标准不确定度uB3为:

|
根据B类不确定度评定结果, 用式 (5) 求B类合成标准不确定度uB合为:

|
用式 (6) 求合成标准不确定度uc为:

|
用式 (7) 求扩展不确定度U=kuc。一般扩展不确定度服从正态分布, 取包含因子k=2则U=2uc, 即压力传感器的扩展不确定度U为:

|
说明: ①在进行A类不确定度的评定中已包含了标准器的非线性、迟滞、重复性和温湿影响及调压气源漏气造成的误差, 在B类不确定度评定时不再考虑。②气压传感器检定设备中的调压器漏气率为0.06 hPa/min, 如读数时间为2 min, 压力最大变化量为0.12 hPa。它服从均匀分布, 即漏气率引入的不确定度分量为0.12/1.732=0.069。在B类不确定度分量中是不可忽略的。考虑到在检定点的稳定过程中, 通常采用所谓的“补气”方法, 即随时调整调压器, 使标准器的示值保持不变, 可以抵消漏气的影响。在进行A类标准不确定度的检定时, 在检定点的稳定时间内应不断调整调压器, 使压力值稳定不变。因此, 气源漏气在B类不确定度分量中, 不再计入。③标准器不稳定性的影响, 依据国内外资料, 对标准器稳定性的考虑一般应在标准器使用2~4个检定周期后, 通过检定数据来统计分析, 或依据多台同型号的标准器的检定数据进行统计分析来考虑该仪器的稳定性情况。由于目前标准器的稳定性资料缺乏, 暂且忽略不计。不在B类不确定度分量中考虑。
2.2 温度传感器检定结果的不确定度分析温度检定自动化系统, 包括数字式铂电阻温度计、温度检定槽、采集器及计算机系统。标准器为数字式铂电阻温度计, 测量范围:-60 ℃~+80 ℃, 测量不确定度0.06 ℃。依据自动气象站检定方法, 取-30 ℃, -10 ℃, 0 ℃, 30 ℃, 60 ℃ 5个检定点, 在每个温度点上进行9次等间隔 (间隔时间2 min) 独立重复测量。用每个温度点上被测温度传感器测量值减去标准值 (标准器的测量值加上修正值), 得出单次测量误差, 用式 (2) 和式 (3) 计算各检定点测量误差的算术平均值的标准偏差列入表 2。
|
|
表 2 被检温度传感器在不同温度点上的测量误差、算术平均值的标准偏差 |
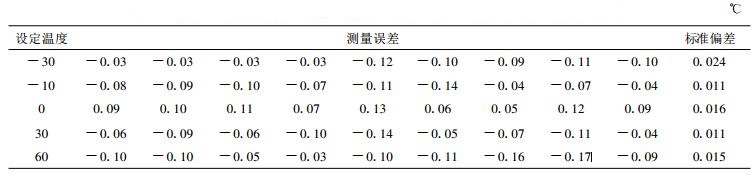
用式 (4) 求出合并样本标准偏差为被检温度传感器的A类标准不确定度uA:

|
温度测量不确定度主要来源于温度标准器的修正值变化、温度检定槽温度场的波动度和均匀度[5]、自动气象站采集器温度通道测量误差及计算机数据处理时的修约误差等。其他误差如连接导线和滞后引起的误差, 由于带来的误差小, 且信息量不足, 无法估计暂且忽略不计。
标准器的不确定度从数字式铂电阻温度计的技术资料可知, 在-60 ℃~+200 ℃的范围内, 其最大极限测量误差为0.06 ℃, 它对各温度点的检定结果的影响是均匀分布的, 取包含因子k=1.732, 因此标准器的测量误差对测量结果引起的不确定度uB1为:

|
温度检定槽的不均匀性引起的不确定度从WFY-201B温度检定槽的技术指标可知, 温度场波动度与均匀度[5]为±0.05 ℃。检定时温度场的不均匀性引起的误差服从反正弦变化规律, 由它所产生的不确定度呈反正弦分布, 取包含因子k=1.4, 相应的标准不确定度uB2为:

|
采集器带来的不确定度 从自动气象站CAWS600-B采集器的技术资料中可知, 采集器的温度通道的最大允许误差为±0.1 ℃, 由采集器产生的误差在各温度点上服从均匀分布, 取包含因子k=1.732, 由此引起的标准不确定度uB3为:

|
计算机数据处理带来的修约误差检定中, 由计算机自动采集标准温度值, 计算机处理时最终保留一位小数。修约误差最大为0.05 ℃, 数据修约误差对各温度点的影响一般呈均匀分布, 取包含因子k=1.732, 则其标准不确定度uB4为:

|
根据B类标准不确定度评定结果, 用式 (5) 求B类合成标准不确定度uB合为:
|
用式 (6) 求合成标准不确定度uc :

|
用式 (7) 求扩展不确定度, 合成标准不确定度乘以包含因子得扩展不确定度, 一般情况下扩展不确定度可视为正态分布, 包含因子取k=2, 则温度传感器的扩展不确定度U为:

|
说明:在检定A类不确定度时, 已包括温度槽的波动度所产生的不确定度, 因此在进行B类不确定度分析时不再考虑。
2.3 湿度传感器检定结果的不确定度分析湿度检定自动化系统装置包括数字式标准通风干湿表、湿度检定箱、采集器及计算机系统。标准器为数字式标准通风干湿表, 测量范围为10%~100%(相对湿度), 测量不确定度为2%。
直接用数字式标准干湿表测量自动气象站的湿度传感器的湿度值, 选取3个湿度点: 90%, 70%, 30%, 每个湿度点等间隔 (间隔为2 min) 测量10次数据, 用每个湿度点上被检湿度传感器测量值减去标准值 (标准器的测量值加上修正值), 得出单次测量误差, 用式 (2) 和式 (3) 计算各检定点测量误差的算术平均值的标准偏差列入表 3。
|
|
表 3 被检湿度传感器在不同湿度点上的测量误差、算术平均值的标准偏差 |

用式 (4) 求出合并样本标准偏差为被检湿度传感器的A类标准不确定度uA:
|
湿度检定结果不确定度主要来源于湿度标准器的修正值变化、湿度检定箱湿度场的波动度和均匀度、自动站采集器测量误差及计算机数据处理时的修约误差等。
标准器的不确定度从标准器数字式干湿表的技术资料可知, 在相对湿度为10%~100%的范围内, 测量不确定度为2%, 则其极限误差ΔH=2%, 在各检定点的测量过程中, 给被检结果带来的误差服从均匀分布规律, 取包含因子k=1.732, 则由标准器引起的标准不确定度uB1为:

|
湿度检定箱不均匀性带来的不确定度从DJM-10湿度检定箱湿度场不均匀性技术指标给出≤1%, 由此产生的误差分量呈反正弦分布, 取相应的包含因子k=1.4, 由此带来的不确定度uB2为:

|
采集器引入的不确定度 从自动站采集器CAWS600-B的数据采集精度指标可知, 采集器的湿度通道最大测量误差为±1%, 对各检定点所产生的影响服从均匀分布规律, 取包含因子k=1.732, 由此引起的标准不确定度uB3为:

|
计算机数据处理修约引起的不确定度检定时计算机自动采集标准器湿度值并保留1位小数位, 则数据修约误差最大值为0.05%, 数据修约误差呈均匀分布, 取包含因子k=1.732, 由此引起的标准不确定度为uB4:

|
根据B类标准不确定度评定结果, 用式 (5) 求B类合成标准不确定度UB合:
|
用式 (6) 求合成不确定度uc:

|
用式 (7) 求扩展不确定度U, 依据规范, 合成标准不确定度乘以包含因子得扩展不确定度, 一般情况下扩展不确定度可视为正态分布, 则包含因子取k=2

|
说明:在进行A类标准不确定度的评定时, 湿度的滞后、温度的影响、湿度箱的工作区域的波动度均已包括在内, 在进行B类评定时不再计入。
2.4 雨量传感器检定结果的不确定度分析雨量检定自动化系统装置包括标准雨量球、标准雨量球辅助设施、采集器及计算机系统。标准器为标准雨量球, 测量范围: 314.16 mL, 942.48 mL; 测量不准确度: 0.2 mL~0.5 mL。
在不同降雨量和雨强条件下, 对被测雨量传感器 (单、双翻斗) 等间隔进行6次重复测量, 用各次被测雨量传感器的测得值减去标准值 (标准球的容积值) 得出各次测量误差, 用式 (2) 和式 (3) 计算各检定点测量误差的算术平均值的标准偏差列入表 4。
|
|
表 4 被检湿度传感器在不同湿度点上的测量误差、算术平均值的标准偏差 |

用式 (4) 求出合并样本标准偏差为被检雨量传感器的A类标准不确定度uA:
|
自动站雨量传感器的B类标准不确定度主要来源于标准器的修正值变化和数据采集器的计数误差, 从雨量标准器使用说明书中得知, 雨量标准器的测量极限误差为0.2 mL, 对雨量传感器产生0.001 mm的极限误差, 对检定结果的影响呈正态分布, 取包含因子k=2, 则:

|
用式 (6) 求合成不确定度为uc:

|
因合成不确定度一般服从正态分布, 取包含因子k=2得被检雨量传感器的扩展不确定度U为:

|
风速检定装置包括皮托管、数字式微差压计、回路环型低速风洞、数据采集器及计算机数据处理系统。标准器为皮托管 (测量范围: 2 m/s~60 m/s, 系数ξ在0.99~1.01之间)。
在进行A类标准不确定度评定时, 是在不同流速点上合并样本标准差来计算 (每个流速点等间隔手工录取或自动采集标准风速和被检风速值各9次数据) 的。
空气流速取5, 20, 30 m/s 3个流速点, 在每个流速点上, 等间隔 (间隔为2 min) 录取9次数据, 用被检风速传感器的风速值减去标准风速值 (皮托管测量出的实测风压经温度、湿度、气压修正后得出的实测风速) 得出各风速点各次测量误差用式 (2) 和式 (3) 计算各检定点测量误差的算术平均值的标准偏差列入表 5。
|
|
表 5 被检湿度传感器在不同湿度点上的测量误差、算术平均值的标准偏差 |

用式 (4) 求出合并样本标准偏差为被检风速传感器的A类标准不确定度uA:

|
说明:用计算出的各检定点的算术平均值的标准偏差除以该点的风速值×100%, 转化为相对标准偏差为0.48%, 0.165%, 0.17%。
B类标准不确定度主要来源于标准皮托静压管[6]、数字微差压计[7]、风洞流场的不稳定性 (不均匀性)、流场紊流度、计算机数据处理时的修约误差等。
由标准皮托管校准系数引入的不确定度根据国家气象计量站风洞实验室的试验结果, 该项误差不超过0.05%, 按均匀分布, 取包含因子k=1.732, 其相对标准不确定度uB1为:

|
皮托管静压管安装偏斜引入的不确定度检定时要求, 皮托管的总压孔应正对气流来向, 但在实际检定过程中, 存在安装和操作的随机性, 安装时不可能与气流来向绝对一致, 总压孔偏离气流的来向, 致使皮托管输出的实测风压产生误差。由国际流量测量标准ISO3966可知, 当气流与皮托管总压孔的偏斜角度在3°时 (最大估计), 所引起的皮托管的实测风压相对标准不确定度uB2为:
|
风洞试验段流场不均匀性引入的不确定度根据HDF-500型低速风洞实验段气流不均匀性的检定结果, 其流速不均匀性标准相对偏差未超过0.5%, 其误差按正态分布, 取包含因子k=3, 由流场流速不均匀性引起的相对标准不确定度uB3为:

|
风洞试验段流场的紊流度引入的不确定度根据HDF-500型低速风洞的技术指标, 其试验段气流紊流强度在0.5%以内, 它所产生的误差呈均匀分布, 取包含因子k=1.732, 由流场的紊流度引入的相对标准不确定度uB4为:

|
计算机数据处理时的修约误差引入的不确定检定过程中, 计算机自动采集数字微压计输出的实测风压值, 并保留一位小数, 其修约误差最大为0.05%。修约误差呈均匀分布, 取包含因子k=1.732, 则有数字修约误差所引入的相对标准不确定度uB5为:

|
数字微差压计测量误差引入的不确定度从技术资料中可知数字微压计的最大允许误差为0.8 Pa, 随着风速的增加, 差压值增大, 其影响的量值越小。相反, 随着风速的降低, 差压值越小, 相对误差值变大。为保证在一定的测量范围内, 测量结果有一个可以接受的准确度, 分别取5 m/s, 20 m/s, 30 m/s不同风速点计算。低速段选择5 m/s作为测量范围的下限风速, 5 m/s的相当风速, 其相应的实测风压为15.3 Pa。在该风速点, 实测风压值的最大相对误差为0.8/15.3=5.2%, 服从正态分布规律, 取包含因子k=3, 其相对标准不确定度为5.2%/3=1.73%; 当流速为20 m/s时, 相应的实测风压值为244.9 Pa, 最大相对误差为0.8/244.9=0.3%, 相对标准不确定度为0. 3%/3=0.11%, 当流速为30 m/s时, 相应的实测风压值为551.0 Pa, 最大相对误差为0.8/551.0=0.14%, 相对标准不确定度为0.14%/3=0.05%; 为确保安全, 提高分析数据的可信度, 微压计引入的不确定度 (选最大值) uB6为:

|
根据B类标准不确定度评定结果, 用式 (5) 求B类合成相对标准不确定度uB合为:

|
用式 (6) 求合成相对标准不确定度uc为:

|
用式 (7) 求扩展不确定度, 因合成相对标准不确定度一般服从正态分布, 取包含因子k=2, 得被检风速传感器的扩展不确定度U为:

|
以上只对一种型号的自动气象站进行了分析, 针对其他型号的自动气象站各要素传感器的检定结果的不确定度分析也可参照。不确定度分析中A类标准不确定度的评定方法是固定的, 不同的是B类标准评定, 根据被测传感器的特性不同而不同。
检定结果的不确定度分析, 在将来的计量检定和对被测传感器或仪器的计量学性能的综合评定的应用会越来越广泛, 因此, 掌握一种符合国际惯用的分析方法非常重要。
检定结果的不确定度分析, 应该准确把握和分析不确定度分量, 做到不遗漏、不重复。所采用的方法要准确、科学、合理。不管是标准不确定度的A类评定还是B类评定, 当采用不同准确度等级的标准器和相关检定设备时, 不确定度分析结果是不同的。因此, 对于准确度比较高的被检传感器应采用准确度高、性能稳定、可靠的标准和设备进行检定, 否则会给被检传感器带来附加误差, 从而给被检传感器的性能带来不公正和不科学的判断。
| [1] | 中国气象局. II型自动气象站行业标准.北京:气象出版社, 2000. |
| [2] | 国家质量监督检验检疫总局.通用计量术语及定义.北京:中国计量出版社, 1999. |
| [3] | 国家质量监督检验检疫总局.测量不确定度评定与表示.北京:中国计量出版社, 1999. |
| [4] | 国家质量监督检验检疫总局.测量不确定度的简化评定.北京:中国计量出版社, 2004. |
| [5] | 国家质量监督检验检疫总局.环境试验设备温度、湿度校准规范.北京:中国计量出版社, 2003. |
| [6] | 国家质量监督检验检疫总局.皮托管检定规程.北京:中国计量出版社, 1998. |
| [7] | 国家质量监督检验检疫总局.标准补偿式微压计检定规程.北京:中国计量出版社, 1994. |