 2006, 17 (4): 467-472
2006, 17 (4): 467-472


 in which ρ is the solution density, g is the gravity acceleration, D is the vapor diffusion constant, η is the viscosity of the solution, U0 is the normal humidity at the surface of the saturated solution, U1 is the initial humidity in the air bubble, and U2 is the humidity of the air released from the air bubble when it bursts.
To test the new humidity generator described above, a test set is calibrated against a M4 hygrometer (General Eastern Instrument) with the dew point temperature uncertainty of 0.2 ℃. The absolute values of the differences between readings from the test humidity generator and those from the reference hygrometer are no bigger than 1%. The response time is typically 10 minutes under common application conditions.
The sources of error for the humidity generator using the air bubble method are also discussed. The analysis and the test show that a humidity generator based on air bubbles from saturated saline solution is simple, fast, accurate, and less affected by environmental factors, and is a real utility humidity reference, in particular can be used in onsite calibration of humidity sensors at automatic weather stations.
in which ρ is the solution density, g is the gravity acceleration, D is the vapor diffusion constant, η is the viscosity of the solution, U0 is the normal humidity at the surface of the saturated solution, U1 is the initial humidity in the air bubble, and U2 is the humidity of the air released from the air bubble when it bursts.
To test the new humidity generator described above, a test set is calibrated against a M4 hygrometer (General Eastern Instrument) with the dew point temperature uncertainty of 0.2 ℃. The absolute values of the differences between readings from the test humidity generator and those from the reference hygrometer are no bigger than 1%. The response time is typically 10 minutes under common application conditions.
The sources of error for the humidity generator using the air bubble method are also discussed. The analysis and the test show that a humidity generator based on air bubbles from saturated saline solution is simple, fast, accurate, and less affected by environmental factors, and is a real utility humidity reference, in particular can be used in onsite calibration of humidity sensors at automatic weather stations.
在可溶性盐的水溶液表面, 因分布有一定量的被离解了的盐的离子, 所以降低了溶液表面水汽压。溶液表面的离子浓度 (或/和离子尺寸) 确定水汽压下降程度。有一些盐, 随温度变化时溶解度的变化趋势正好与水的饱和水汽压变化趋势比较接近, 因此表现为这种盐的饱和溶液表面相对湿度接近于定值。利用饱和盐溶液这个特点校准湿度传感器, 具有独立复现湿度值、结构简单、精度高的特点, 因此被ISO推荐为实用湿度源[1-2]。
利用饱和盐溶液的恒湿性校准湿度传感器的方法如图 1所示。

|
|
| 图 1. 用饱和盐溶液校准湿度传感器的常用方法 (a) 静止式, (b) 搅拌式 | |
在静止式应用中, 等待水汽平衡的时间长、效率非常低; 在搅拌式应用中, 密封连接是关键技术之一。有一种改进的搅拌式饱和盐湿度发生器[2], 溶液室与校准室分开, 用摇晃溶液室中溶液的方法以增加溶液有效表面积, 溶液室与校准室通过管路连接成密闭环路、并使密闭系统中的气体能在溶液室与校准室之间循环, 加快校准室与溶液室之间的水汽平衡。
所有搅拌式应用中存在的共性问题不仅结构复杂, 而且容易发生漏气、搅拌机构又给系统增加了热源, 其结果是难于真正独立复现湿度值。
本文提出的设计思想是:气泡是理想密封容器, 只要足够小, 在气泡破裂前, 气泡内的气体就能达到水汽平衡; 借助气动力, 把气泡释放出来的湿空气收集起来, 就可以用来校准湿度传感器, 如图 2所示。本文将重点讨论气泡内水汽平衡这一核心问题。

|
|
| 图 2. 气泡法饱和盐湿度发生器结构示意图 | |
1 气泡内水汽平衡需要的时间
在密闭容器中, 饱和盐溶液上方空气中水汽平衡速度与溶液表面积A和溶液上方气体部分的容积V有关。如图 3所示, a与b有相同的溶液表面积, 溶液上方容积Va > Vb。很显然, 容器b比容器a容易达到水汽平衡。

|
|
| 图 3. 不同形状容器中水汽平均扩散距离 | |
定义水汽平均扩散距离
|
(1) |
在图 3中, 本质上是因为水汽平均扩散距离Lb < La, 所以b比a容易达到水汽平衡。
在各种饱和盐湿度发生器中, 工艺设计的一个共性问题就是千方百计减小水汽平均扩散距离。按照以上定义, 气泡内水汽平均扩散距离

|
(2) |
以下定量分析水汽平衡时间与平均扩散距离的关系。将密闭容器内气体部分等效为一底面积为A、高为L的圆柱形空间 (如图 4所示), 水汽密度ρ沿垂直于溶液表面的y轴方向均匀改变。在溶液表面 (y=0) 水汽密度恒为ρ0, 在容器顶部 (y=L), 初始时刻的水汽密度为ρ1, 则初始时刻圆柱形空间水汽总量为

|
(3) |

|
|
| 图 4. 水汽扩散模型 | |
经时间dt, L处的密度升为ρ2, 该圆柱形空间水汽总量变为

|
(4) |
所以, 在dt时间内该圆柱形空间水汽增量

|
(5) |
其中, dρ=ρ2-ρ1, 为L处水汽密度在dt时间内的增量。
令dρy/dy是在y轴方向的水汽密度梯度, 则在时间dt内通过非常靠近溶液表面的某一截面扩散的水汽质量

|
(6) |
式 (6) 中D为水汽扩散系数。因为水汽扩散只能从高密度到低密度, 即沿y轴正方向密度梯度是负值, 而质量增量必须是正值, 所以该式前应加负号。

|
(7) |

|
(8) |
在dt时间内通过上述假定截面的水汽量dMt实际上就是从溶液表面蒸发到空气中的水汽量, 它应等于圆柱形空间内水汽增量dML, 即dMt=dML。

|
(9) |
|
(10) |
对式 (10) 两边积分, 得在L处水汽密度由ρ1改变到ρ2所需的时间:
|
(11) |

|
(12) |
其中, T是温度, ew是在温度T时饱和水汽压, R是水汽比常数, Ui是水汽密度ρi所对应的相对湿度。因为水汽平衡过程是等温过程, 所以系数ew/RT是常量, 将式 (12) 代入式 (11), 得
|
(13) |
式 (13) 表示, 在密封容器中, 当溶液表面湿度恒为U0、溶液上方气体初始湿度为U1, 湿度由U1改变到U2所需要的时间。在水汽平衡过程中, 项 (U0-U1), (U0-U2) 总保持同号, 所以对数的指数部分恒大于0。很显然, 如果要使U2=U0, 则τ趋近于∞; 工程上只需要U2充分接近于U0即可, 所以τ为有限值。
由式 (2), 气泡内水汽平衡所需要的时间
|
(14) |
气泡在溶液中受到2个力的作用:浮力F1, 溶液的粘滞力F2, 如图 5所示。

|
|
| 图 5. 气泡受的力 | |
|
(15) |
|
(16) |
式 (15) 与式 (16) 中, r为气泡半径, ρ为溶液的密度, g是重力加速度, η是溶液的黏度系数, v是气泡上升速度。
忽略气体自身重量, 气泡匀速上升的条件是F1=F2。因此

|
(17) |

|
(18) |
由于阻力与速度成正比, 所以在气泡上升初始阶段, 上升浮力大于阻力, 因此是加速运动。另外, 气泡在上升过程中随着气泡外部压力减小, 体积不断扩大, 所以上升速度略有增加。综合两种效应, 全程平均速度小于匀速度v。设溶液深度h, 则气泡在溶液中存在时间
|
(19) |
很显然, 式 (14) 所计算的气泡内水汽平衡所需要的时间τ必须小于气泡在溶液中存在的时间t。由式 (14)、(15)、(19), 气泡内水汽平衡当满足式 (20) 时, 一定满足τ < t。
|
(20) |
|
(21) |
根据相对湿度的定义, 因为│U0-U1│≤1, 且令│U0-U2│=0.0001, 则有 (U0-U1)/(U0-U2) < 10000, 所以对数项可简化为
|
(22) |
将D≈2.5×10-5 m2/s, ρ≈1×103 kg/m3, η≈1 mPa·s, 式 (22) 一起代入式 (21), 得近似式:

|
(23) |
由式 (23) 可以计算出, 当r=10 mm时, h > 44.5 cm; 当r=1 mm时, h > 0.0045 cm。
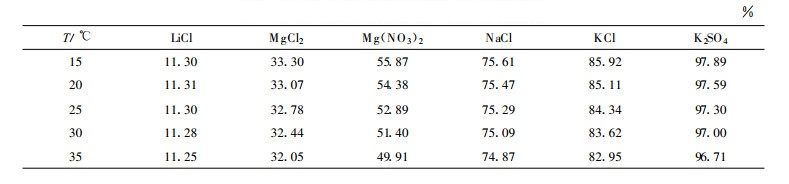
4 实验检验用经过校准的General Eastern公司生产的M4型露点仪作为标准器, 对气泡法饱和盐湿度发生器试验装置进行了实验验证。试验方法:将露点仪的探头置于发生器输出的气体中, 测出溶液温度、并计算出对应露点温度作为试验装置的标称值, 同时记录露点仪的实测露点温度。试验环境温度27 ℃左右, 湿度50%~60%;试验中使用到的几种盐的饱和溶液在常温下的标称湿度如表 1[1]所示, 结果如表 2所示。
|
|
表 1 几种盐的饱和溶液在常温下的相对湿度值 |
|
|
表 2 气泡法饱和盐湿度发生器试验装置标称湿度与实测值 |
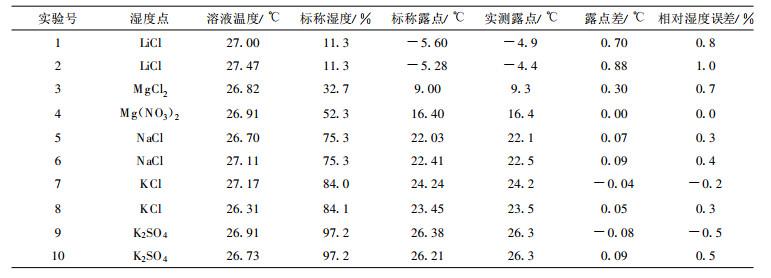
数据处理说明:根据溶液温度和表 1计算出标称湿度。因为标准器只能测量露点温度, 所以根据标称湿度、相对湿度与露点温度之间的关系计算出“标称露点”温度。露点差=露点仪实测露点-标称露点温度。因为检定湿度传感器通常用相对湿度作单位, 所以, 再反过来, 根据露点温度误差与相对湿度误差之间的关系计算出试验装置的相对湿度误差。
由表 2可见, 标称湿度在11.3%~97.2%范围内, 试验装置相对于露点仪的相对湿度误差绝对值不大于1%。
如图 2所示, 气泡法饱和盐湿度发生器是开环运行方式, 当气泡浮出溶液后水汽平衡即告完成, 此过程只需数秒时间。在试验装置中, 露点仪示值趋近于标称露点所需要的时间主要决定于发生器排除尾气的速度、输气管路及校准室材料表面吸湿性, 也与露点仪本身的响应有关。图 6是在用LiCl溶液 (相对湿度为11%) 代替KCl (相对湿度98%) 以后, 在校准室内用露点仪实测到的露点温度与试验装置标称露点温度之差随时间变化曲线。由图可见, 开始的6 min左右是发生器排除尾气所需时间, 其余时间主要是由于管路及校准室材料表面吸附的水汽引起的。图 6基本上反映了试验装置在比较极端情况下的响应时间。试验表明, 在相临试验湿度点之间湿度差为20%左右, 在本研究使用的试验装置中, 露点仪测得的响应时间约为10 min。

|
|
| 图 6. 气泡法饱和盐溶液湿度发生器实验装置的响应时间 (在用LiCl代替K2SO4之后, 校准室实测露点温度与标称露点温度之差与时间关系) | |
5 误差分析 5.1 环境湿度的影响
当环境湿度很大, 气泡内溶液浅表面必然有大量水汽凝结, 如果存在于溶液中的溶质的溶解速度跟不上水汽凝结速度, 溶液就会出现欠饱和状态、使输出湿度偏高。伴随水汽蒸发或凝结, 由于水的相变潜热在溶液中同时有吸热或放热过程发生, 从而改变了溶液温度。溶液温度变化进一步引起溶质溶解度的变化。如果溶解度变大, 同样引起溶液欠饱和、使输出湿度偏高。
溶液欠饱和程度除了与环境湿度和平衡湿度点有关外, 还与气体流量有关。在极端情况下, 由于欠饱和引起的湿度偏高可能大于1%。
5.2 溶液中气泡压力影响由于液体压力, 气泡内的压力一定大于环境压力。在气泡浮出溶液表面、破裂后, 气体压力下降, 水汽分压也下降。一般溶液深度为几厘米, 所以相对湿度下降百分之零点零几[3]。
5.3 溶液曲面效应对平衡水汽压的影响气泡内溶液表面是曲面, 曲率为负的溶液表面饱和水汽压比水平面水汽压低, 曲率半径越小, 下降越多。但由于气泡直径通常多在毫米量级, 饱和水汽压下降小于0.01%[3], 所以曲面引起的水汽压偏低可以忽略。
5.4 气泡碎片污染的影响气泡破裂后, 非常细小的溶液滴会随气流漂向校准工作室, “污染”沿途管路、校准室和被校准的元件。与其他饱和盐湿度发生器比较, 这是气泡法湿度发生器的突出缺点。用气泡法发生器校准以后应当对传感器的敏感元件进行简单清洗。到目前为止, 尚未观察到这种“污染”对输出湿度或传感器性能有显著影响。
6 气泡法饱和盐湿度发生器的特点和应用前景1) 可以独立复现湿度值, 误差因素少、精度高。
2) 比较快捷; 开环工作、传感器发热影响小; 可以做成多路切换、快速发生不同湿度, 用于湿度传感器动态特性试验。
3) 结构简单、环境适应性好, 因而可以制成便携式, 适合野外自动气象站湿度传感器校准。
4) 要评估气泡破裂后细小溶液滴对装置和被检传感器的影响, 还需要有长期、更多的数据积累; 如有必要, 可以用在盛溶液的容器与校准室之间加过滤器的办法解决。
| [1] | 李英干, 范金鹏.湿度测量.北京:气象出版社, 1990: 350-361; 503-505. |
| [2] | 王金钊. 恒湿盐湿度发生器研制. 应用气象学报, 1995, 6, (4): 427–435. |
| [3] | 徐祝龄. 气象学. 北京: 气象出版社, 1994: 384-387. |