 2005, 16 (5): 629-637
2005, 16 (5): 629-637


2. 中国气象科学研究院, 北京100081
2. Chinese Academy of Meteorological Sciences, Beijing100081
云在天气系统发展、降水形成和大气辐射传输等物理过程中都扮演着极其重要的角色,如何准确、及时地获取云的信息,对于天气气候学研究、气象预报、人工影响天气以及国民经济和军事等诸多领域都十分重要。由于云的全球时空分布变化的复杂性,迄今人们对云的分布、变化和它的地球-大气系统辐射强迫作用的认识仍相当粗糙,这是气候变化研究中十分关键的一个不确定因素。因此,进一步发展和完善云的宏、微观特征遥感系统,倍受科学界的关注。
云底和云顶高度都是云的基本宏观参数,本文着重讨论云底高度,以下简称云高。目前气象台站仍主要采用目测云高,有很大的主观性。气球测云高和夜间云幕灯观测云高等虽是可行的器测云高方法,但观测时间长,效率也较低,并且会受到一些客观条件的限制,在常规观测中难以普及。近年来随着激光技术的发展,出现了测量精度高的云高激光探测仪,但该方法一次只能测天空中一个点的云高,存在测量值的代表性问题,到目前为止主要应用于机场和科研,也尚未普及。因此,发展新的精度高、可靠性好、经济实用的自动化高的探测系统仍然具有重要的科学意义和应用价值。
数字摄像技术是一种已在许多领域取得重大应用成效的高新技术,它在资源、环境和大气的卫星遥感上已经获得了广泛应用,定性和半定量遥感应用硕果累累,定量遥感研究方兴未艾。Long等[1]和霍娟等[2]利用全天空数字相机测量云量;Jia[3]通过多角度的卫星云图资料来提取云顶高度以及云的移动速度;中国科技大学[4-6]采用单站数字摄像仪与多个目标物测量大气能见度等等,这些都为我们采用数字摄像技术测量云的宏观物理特征提供了非常好的基础。在此基础上,我们采用数字摄像系统研发了一种新的地基、双站数字摄像云高测量系统,进行了云高测量的试验,并将探测结果与合肥骆岗机场激光测云仪的云高观测资料进行了对比分析。
1 测量原理 1.1 三维双站测距法双站测距法在很多领域都有应用[7-8],主要是采用两个方位不同的摄像仪拍摄同一物体,利用该物体成像位置的差异来计算物距。图1为三维双站测距法的示意图。摄像系统采用CCD(电荷耦合器件)感光面阵,以下将CCD摄像机简称为CCD 。第1台CCD放置于坐标原点O,第2台CCD放置在距坐标原点距离为d的点B,物体A在空间中任意一点(x,y,z),其中x-y轴平面为两台CCD所在水平面,z为物体A到该水平面的距离。若两台CCD各自光轴的天顶角不共面,所拍摄的两幅云图中云的轮廓会有较大差异,造成图像失真,难以实现图像匹配。为此,调整两台CCD的光轴,使它们保持在过天顶的同一个平面内,OQ、BQ分别为两台CCD的光轴,其中OQ的天顶角为α,BQ的天顶角为β,Q为两光轴的交点,A′为物体A在光轴相交平面上的投影。

|
|
| 图 1. 三维测距示意图 | |
由于物距远远大于焦距,则物体成像在焦平面上。O1与O2分别为两台CCD焦平面的中心,即焦点,则物体A在两台CCD上分别成像于A1和A2,它们在焦平面上的坐标分别为(x1,y1)与(x2,y2),这里要求进行CCD取向调节时保证像平面上y1和y2的指向一致、并与基线垂直。ω为AO与光轴QO的夹角,γ为AB与光轴QB的夹角。我们采用的是等距离投影方式的鱼眼镜头,成像公式为
|
(1) |
式(1)中,h为像高,即像点离光轴的距离;f为焦距;ω为入射光线视场角。结合图1和式(1),两台CCD方位角与焦距相同、天顶角任意情况时的三维测距公式为
|
(2) |
由于云在图像中的边界线形状复杂且常常很不清晰,如何自动从图像中识别出同一云块在不同的图像中的位置是该方法的主要难点,实际操作中,采用模块匹配法[9]来识别特征区域。该方法首先从一幅图像中选出一块特征区域,然后从另一幅图像中搜寻与该特征区域相似度最大的区域,称为匹配区域,并认为两个区域代表同一物体。
|
(3) |
式(3)为模块匹配的公式,其中R为归一化的相似性测度,T(m,n)为特征区域上点(m,n)的特征参数(如亮度或图像灰度),M为特征区域尺度,S为搜索图上与特征区域同样尺度的区域,Si,j(m,n)为该区域上与T(m,n)对应的像素点的特征参数,i,j为该区域左上角在搜索区域上的坐标。为使得不同i,j的R差异显著,选取的特征参数在图像中不同位置的差异必须明显。散射效应使得云图中天空和云体的亮度差异较大,因此我们选取图像中的亮度信息做为云图的特征参数。
根据模块匹配法的特点(特征越明显,不同区域相似度的差异越大,匹配的效果越好),选取的特征区域里同时包括了云块和天空,实际的具体步骤如下:① 对其中一幅图像进行自动搜索,由于云块与天空之间亮度不同,而同为云(天空)的时候亮度较均匀,因此选取所有区域中亮度差异最大(特征最明显)、并且云块和天空所占比例要大于某一阈值的区域为特征区域;② 在另外一幅图像中根据式(3),找寻与特征区域大小相同、相似度最大的一块区域为匹配区域;③ 计算两块特征区域之间的像素位移,并得到云高。重复①~③,可以计算出云图中多个特征区域的高度。
2 测量系统图2为测量系统的结构示意图。该系统通过两台CCD直接摄取天空的云图,然后同时将两台CCD所摄取的图像由采集卡传到计算机内存中,再采用模块匹配法计算出云高。

|
|
| 图 2. 双站数字摄像测云高系统结构示意图 | |
在1.1节的讨论中,要求两台CCD像平面的y轴方位角彼此相同且与基线方向垂直。为此,在实际仪器调整过程中,我们根据正午时太阳所在位置为正南方以及利用仪器附近的地物目标等多种方法,对CCD的方位角和光轴的指向进行了精细调整。另外,根据式(2)计算云高,需测量两台CCD光轴的天顶角,为减少测量所带来的误差,并使得计算云高的公式简化,我们将两台CCD的光轴的天顶角都调整为0°。
由于实验室所在地附近新建了一座高楼,造成严重的视线阻挡,不能进行全天空观测;相应地,我们选用较小的CCD靶面使得系统实际的视角范围较小。因此可以把鱼眼镜头成像公式简化为经典的薄透镜成像公式(误差小于0.5%),式(2)可简化为
|
(4) |
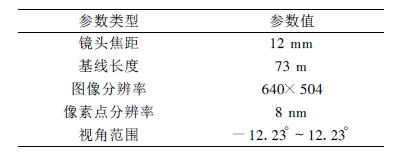
为了减少云体移动所带来的误差,系统中采用了DH-CG300图像采集卡,能实现同时采集多幅图像的功能。并且在系统中选用型号相同的CCD和镜头,使得两套光学系统的焦距相等。表1给出了该系统的主要参数。
|
|
表 1 系统参数 |
3 试验结果
在系统研制完成后,于2003年6~10月以及其后在中国科技大学物理楼顶做了一系列的测量工作。根据云图特点,可以从中得到同一块云的不同位置的云高资料,而不是单一某一个方位的云高,并且通过它们的平均值来减小误差。在这里,我们从一幅图中选取4个特征区域。图3、图4分别给出了为高云、低云时的例子,图中A,B,C,D分别为4个特征区域,而另外一幅图中的A′,B′,C′,D′则为这4个特征区域的匹配区域。4个区域的云高以及平均云高见表2。
|
|
表 2 各区域云高以及平均云高 |


|
|
| 图 3. 2003年8月26日16 :02(北京时, 下同)双站数字摄像测高云云高(云高7218 m) (a)CCD1,(b)CCD2 | |

|
|
| 图 4. 2003年9月11日10 :53双站数字摄像测低云云高(云高1478 m) (a)CCD1,(b)CCD2 | |
这里给出的4个区域都在同一云层高度上,因此取它们的平均云高为最后的云高,若多个区域中有属于不同云层的云高存在(如高云和低云),则不能一起平均,需分开处理,并应结合云像其他特征进一步判定多层云各自的高度。
为了检验试验数据,我们选取合肥市骆岗机场的激光测云仪云高探测资料做对比分析。由于现有观测场地和光学机械加工精度的限制,通过手动精细调节CCD光轴的天顶角之后,仍然难以完全消除光轴天顶角的系统偏差,而根据式(2)可知,天顶角偏差所引起的云高测量误差为非线性的,必须尽量减小乃至消除其影响(后面将进一步讨论关于该系统误差的消除方法)。为此,我们首先从双站数字摄像系统的云高测量结果中随机抽取一部分,并根据相应时间内激光测云仪云高资料,作线性拟合,并得到一个线性拟合公式:

|
(5) |
式(5)中,z为激光测云仪得到的云高(假设其为真实值),z′为双站数字摄像系统测量的云高资料(单位:m),然后再对本系统所有的云高观测结果根据式(5)进行系统误差订正。需要说明的是:我们测量的地点与骆岗机场相距超过4 km,同时激光测云仪逐次测量的结果是天顶方向的单点云高,因此两种方法测量的云高资料难以直接作逐次测量结果的一一对应的对比。但由于一般情况下,在同一地区、同一天中,云的凝结高度是相同的,且高云、中云的云况也基本相同。所以我们先把自己的云高资料在测量时间范围内计算平均值,平均时间间隔为30 min,并采用订正公式进行系统误差校正,再将骆岗机场资料中与我们测量的相应时段前后30 min内的云高资料进行平均(不同云层的云高分别平均)得到对应时段的激光测云仪云高资料。
图5给出了对比结果,其中双站数字摄像系统的测量结果已进行了系统误差修正,图中σrd为均方根相对偏差

|
|
| 图 5. 订正后的云高对比图 | |

|
(6) |
式(6)中,i为数据的序号,N为数据的总数,z′i为双站数字摄像系统测量的云高,zi为激光测云仪测量的云高。
从图5可以看出,订正系统误差后,中低云的结果较好,而为高云时,离散较大。这是由于高云的图像比较模糊(卷云都较薄),自动搜寻的匹配区域可能有1~2个像素点的位移误差,而高云时特征区域之间的像素位移量小,在图像分辨率不变的条件下,对高云云高的测量相对误差就会较大。
图6为分别利用双站法和激光测云仪测量云高的统计对比图,其中纵坐标为各个云高上的总探测次数,Rcc为相关系数,云高的间距为500 m 。从中可以看出,总体上来说两套仪器所测量同一地区各种云出现频率分布曲线大体相同,这进一步印证了双站数字摄像测量云高方法的合理性;同时也注意到图6中4 km到5 km之间的趋势彼此不一样,这可能与测量数据太少(共271个数据)有关。另外,图6中双站系统获得的云高的波峰和波谷(特别是低云)相对于激光测云仪的波峰、波谷都有一个位移,这可能是由于我们所选取的特征区域主要是在云层边界,测量的是云层边界的云高,而激光测云仪得到的是激光束经过点的云高,大部分为云底中心地带的高度所引起的。

|
|
| 图 6. 云高统计对比图 | |
4 误差分析
这里有必要分析哪些因素会严重影响双站数字摄像系统测量云高的可靠性,明确为保证测量精度各个系统参数所必须达到的要求,进一步探讨该技术在全天空测量情况下的可行性。为简明起见,这里只讨论CCD天顶角为0°、采用鱼眼镜头的全天空摄像情况下,在过基线和天顶的同一平面内各个参数对测量误差的影响。根据式(1)及式(2)得到:
|
(7) |
式(7)中ω与γ为图1中两台CCD的入射光线视场角,z为云高,d为基线长度,则误差公式为:

|
(8) |
基线长度的测量误差是小量,因此误差的主要来源是入射光线视场角的误差,也就是匹配时像素点的误差(式(1))。由式(7)可以看出入射光线视场角与云高和基线长度有关,这些参数都会影响到整个测量误差。图7为测量误差与云高、入射光线视场角以及基线长度的关系图,这里假设由于匹配算法引起的误差为两个像素点,即入射光线视场角误差为0.08°。从图7中可以看出:① 随着入射光线视场角的增大,测量误差增大,且当入射光线视场角超过60°后,测量误差迅速增加;测量误差随云高增加而增大,当云高超过10 km的时候,测量误差都在10%以上;因此,为了保证在云体较高时也能得到较精确的测量结果(误差小于10%~15%),选择全天空测量云高的有效范围在±45°视野以内为宜;② 基线长度的增长可以在一定程度上减小测量误差,但基线加长会增加ω与γ之间的差异(式(7)),使得同一云体在两幅图像的形变差增大,难以实现匹配,所以基线长度不宜过大,为了使系统能够较为精确地测量低云的云高,基线长度不宜超过200 m 。当然,提高图像的分辨率可以进一步降低入射光线视场角引起的偏差,从而减小测量误差。

|
|
| 图 7. 测量误差与云高、入射光线视场角及基线长度的关系图 (a)误差与入射光线视场角ω以及基线长度的关系, (b)误差与云高z以及基线长度d的关系图(设匹配误差为两个像素点, 即入射光线视场角误差为0.08°) | |
上面的分析也表明:CCD的光轴天顶角和方位角的精确校准十分重要,例如只有保证它们的校准误差小于0.05°才有可能使云高测量误差小于10%,这要通过系统的精密设计和严格校准方可达到的。在试验中除了利用几何方法对系统进行了细致的校准外,还与激光测云仪的数据进行了统计分析和比对,对该测量系统作了系统误差的修正。
5 结论与讨论本文提出了一种新的地基、双站数字摄像测量云底高度的方法,将建立的技术系统与激光测云仪进行了对比观测试验,并通过对云高计算公式的误差分析确定了适于地基双站数字摄像系统进行观测的条件,结果表明:
(1) 利用双站数字摄像系统测量非均匀云层云高的方法是可行的,对中低云的测量精度较高,而在高云时离散较大。
(2) 为保证各种云高条件下的测量精度,全天空测量云高的有效视野范围在±45°以内,且双站基线长度不宜超过200 m 。
(3) 提高系统的图像分辨率可以整体提高系统的测量精度。
现阶段国内外已有大量关于利用数字摄像系统观测全天空云量的报道,但目前云状的自动识别仍然是个难题,而准确地识别云状必须先可靠地估计云高,从可见光波段的单站全天空云像很难鉴别出高云、中云和低云类别。本文介绍的利用双站数字摄像系统测量云高的方法,为克服自动识别云状的难题提供了一种可行的途径,并且该系统还可以应用于云的其他物理特性(如云的光学厚度、移动速度等)的光学地基遥感,可见,云的地基数字摄像遥感研究有着广阔的应用前景。
关于双站数字摄像系统CCD光轴的天顶角的系统偏差问题,前面提到要使云高测量误差小于10%,必须保证它们的校准误差小于0.05°,这就要求该光学机械必须具有精密地调整光轴指向方位角和仰角的功能(把摄像系统安装在类似经纬仪的望远镜位置上是可能的),同时具备可靠的校正方法。本文采用了与激光测云仪测云高进行统计比较的方法,根据我们的测量系统的几何关系式,推算出该系统的天顶角偏差为0.52°,显然在具有精密地调整光轴指向方位角和仰角的条件下,可以通过调整来减小乃至消除其系统误差。另外,对于全天摄像系统,还可以利用高度足够的垂直地标或天体(如北极星)来精细调节和校准CCD光轴的天顶角;目前星光级黑白CCD的技术已经相当成熟,可以保证上面几何校准方法的实现。我们未能利用后一种方法对系统进行校准,是由于试验时只获得了小靶面的彩色CCD器件,使得现有系统的视场角过小。
该系统也还存在着一些不足之处:对于均匀云层,如层云、高层云难以提取特征区域;而对于多层云,由于不同云层之间在同一云图上的叠加,会造成同一块云在两幅云图上的特征区域的匹配度相应减小。是否可以利用高分辨率的CCD来提取均匀云层的特征量?利用晴天与阴天时天空亮度分布不同能否鉴别和反演均匀云层的特征? 利用双站数字摄像与激光测云仪两种技术相结合能否大大提高全天候云的宏观特征遥感的水平等等,这些问题都有待进行深入研究。
| [1] | Long C N, DeLuisi J J, Development of an Automated Hemispheric Sky Imager for Cloud Fraction Retrievals. Phoenix Arizona1, 1998: 171–174. |
| [2] | 霍娟, 吕达仁. 全天空数字相机测量云量的初步研究. 南京气象学院学报, 2002, 25, (2): 242–246. |
| [3] | Jia Z, Geometric Retrieval of Cloud Top Height from MISR Imagery. Vol.3501, 1998: 531–541. |
| [4] | 谢兴生, 陶善昌, 周秀骥. 数字摄像法测量气象能见度. 科学通报, 1999, 44, (1): 97–100. |
| [5] | 吕伟涛, 陶善昌, 谭涌波, 等. 数字摄像能见度观测系统中实用黑体技术的应用. 应用气象学报, 2003, 14, (6): 691–699. |
| [6] | 吕伟涛, 陶善昌, 谭涌波. 双亮度差方法测量白天气象能见度时的误差分析. 应用气象学报, 2005, 16, (5): 619–628. |
| [7] | 刘庆金. 单点双站三角形交会法. 测绘通报, 2001, (2): 34–35. |
| [8] | 袁伟, 金学军. 双星定位的三参数方法及其精度分析. 中国空间科学技术, 2003, (5): 22–27. |
| [9] | Visual C ++ 数字图像处理, 北京: 人民邮电出版社, 2001: 491-598. |