
Study on the hydrodynamic properties of an asymmetrical catamaran
-
摘要: 研究双体船舶阻力性能和片体间作用对船型的优化和设计具有重要意义。本文基于CFD软件Fluent,采用VOF方法,研究了不同瘦削系数的常规双体船和非对称片体组成的双体船水动力性能,分析了双体船2个片体间的干扰效应,以及非对称片体结构对优化双体船水动力性能的作用。通过某一小尺度船舶不同航速下的静水阻力模拟,验证了本文数值方法的有效性。研究发现非对称片体结构可以在一定程度上有效优化双体船水动力性能。本文研究结果可对双体船的外形设计及结构应力分析提供理论支持。Abstract: The study of the resistance performance and interference effect between catamaran demi-hulls is of great significance to the optimization and design of the vessel type. Based on the CFD software Fluent, the hydrodynamic performance of conventional catamarans with different thinning coefficients and the catamaran composed of asymmetrical demi-hulls is studied by the VOF method. The interference effect between two hulls of the catamaran and the effect of asymmetric demi-hull structure on optimizing the hydrodynamic properties of the catamaran are analyzed. Simulation of hydrostatic drag at different speeds of a small-scale vessel verifies effectiveness of the numerical method proposed in this paper. It is found that the asymmetrical demi-hull structure can effectively optimize the hydrodynamic performance of the catamaran to a certain extent. The results of this paper can provide theoretical support for the shape design and structural stress analysis of catamarans.
-
Keywords:
- catamaran /
- asymmetrical demi-hulls of a catamaran /
- CFD /
- VOF /
- hydrodynamic performance /
- drag /
- lateral force /
- thinning coefficient
-
无人双体帆船是以海洋中无限风能驱动、双片体结构的一种船舶,可以实现在海洋环境中对水文和气象数据进行长期、绿色、自主的观测。双体船型相比于常规单体船型具有稳定性高、适航性好、机动性强和甲板面积宽等诸多优点,因而越来越多被应用于高速船舶和小型无人船舶,相对应的无人双体帆船性能分析方法研究也具有重要的工程应用价值。
无人双体帆船在海洋观测等方面具有突出的应用前景,美国Autonomous Marine Systems公司自主研发了Datamaran[1]无人双体帆船进行海表水文数据收集;美国 Harbor Wing 科技公司2006年推出了HWT X-1[2-3]原型样机并进行了海上测试;2003年烟台建成世界上第一艘非对称船型游艇“亚洲女士”号[4]。而在决定其作业性能的双体船阻力分析与预报方法方面的研究则相对较为成熟,章易立[5]基于重叠网格技术对小水面双体船进行了数值模拟,研究了不同支柱形式对小水面双体船波浪增阻的影响;Tarafder等[6]用基于势的面元法计算了深水中双体船的兴波阻力。双体船阻力性能优化的研究也具有重要意义,Wang等[7]采用数值方法研究了规则头波中船尾襟翼对双体船耐波性的优化作用。双体船和单体船最重要的区别之一就是双体船2个片体间的干扰效应,Hu等[8]研究了由2个不同尺度片体组成的双体船的干扰效应,分析了横向间距和纵向间距对阻力和波浪干扰的影响;Souto-Iglesia等[9]对60系列双体船在固定自由度和开放自由度情况下抗干扰性的试验评估,发现双体船在不同弗洛德数范围内,存在干扰效应有利的范围和干扰效应不利的范围。双体船干扰效应的一个显著特点就是片体两侧湿面积不对称,Yengejeh等[10]对非对称双体船干扰效应和湿面积分布进行了数值研究,发现非对称结构可以在一定程度上减小湿面积,降低船舶阻力。
目前对双体船阻力分析与预报已有大量研究,对双体船片体间干扰效应研究也相对成熟,但与常规单体船不同,双体船两片体间距较小,存在强烈的流场干扰,导致常规对称型船体将会产生较大的横向力,使得片体间连接桥易受交变载荷作用而影响其强度。本文以非对称片体的双体船为主要研究对象,探讨瘦削系数、航速等参数对于非对称片体双体船的力学性能的影响效果,给出非对称片体双体无人帆船航行性能分析方法与设计合理化建议。
1. 基本方法
本文数模方法的基本方程为不可压缩粘性流体的连续性方程和Navier-Stokes方程,在流体力学中有十分重要的意义。方程表达式为
$$ \frac{{{{\partial}} {u_i}}}{{\partial {x_i}}} = 0 $$ $$ \begin{split}&\qquad\qquad \rho \left[ {\frac{{\partial {u_i}}}{{\partial t}} + \frac{\partial }{{\partial {x_j}}}\left( {{u_i}{u_j}} \right)} \right] =\\& \frac{{\partial p}}{{\partial {x_i}}} + \frac{\partial }{{\partial {x_j}}}\left( {\mu \frac{{\partial {u_i}}}{{\partial {x_j}}} - \rho \overline {{{u'}_i}{{u'}_j}} } \right) + {S_i},{\text{ }}(i,j = 1,2,3) \end{split} $$ 式中:ρ为流体密度,u为速度分量,µ为动力黏性系数,p为压力值,Si为动量守恒方程的义源项。
根据文献建议和实际条件本文选取标准k-ε模型进行数值模拟,k-ε模型应用最广泛,适用范围最多,计算量适中,适用于完全发展的湍流模型,有较多的数据积累和精度[11],选取VOF方法跟踪确定气液交界面的位置。
2. 基本模型
在对双体船数值模拟之前应进行数值方法的验证,本文选用所在课题组已完成测试的船型“SEAFOX”试验结果进行比较,物理模型基本参数及外形如表1和图1所示。
表 1 浮体主尺度主尺度 参数值 船模型长/m 2.40 船模型宽/m 0.70 设计吃水/m 0.15 设计排水量/kg 147.00 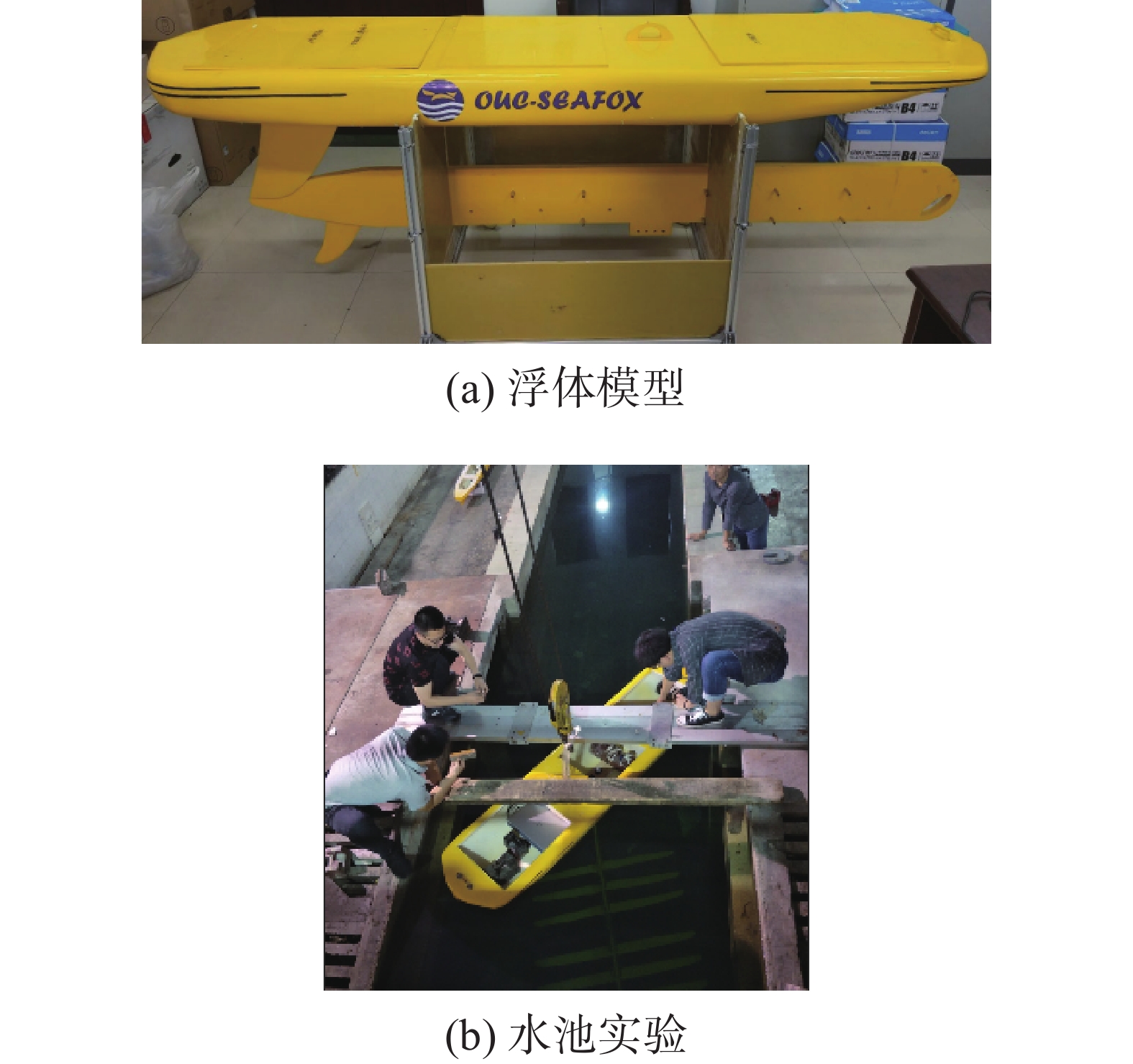 图 1 “SEAFOX”浮体模型与实验
图 1 “SEAFOX”浮体模型与实验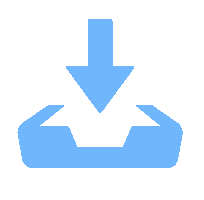 下载:
全尺寸图片
下载:
全尺寸图片
由于浮体左右对称,为尽可能地减少网格数量、节省计算资源,本文将浮体沿中纵剖面一分为二,取一半的船体进行数值计算。为了生成高质量结构网格,对船体水面以上部分形状进行了适当修改。根据其他文献的建议和实际尝试,本文计算域划分方式及边界条件如图2所示。水池上游入口距浮体首部1.5倍船长,水池下游出口距浮体尾部3倍船长,水池顶部距浮体质心0.5倍船长,水池底部距浮体质心1倍船长,水池侧面距离中纵剖面1倍船长。设置合适的边界条件是保证计算值收敛与精确的前提条件。本节边界条件具体设置如下:将入口边界设置为速度入口,将出口边界设置为压力出口,将对称面边界设置为对称平面,该边界条件适用于所研究对象及计算域均呈镜像对称的模型,通过减少一半计算域来提高计算效率,水池边界一般可能会被设置为壁面,壁面处的流体速度为零。利用通用网格划分软件ICEM对船体划分结构网格,为了更准确地捕捉自由液面,在自由液面附近网格进行加密,为了保证船体附近流场的准确性,对船体附近网格加密,同时在划分网格的过程中尽量避免网格密度大幅度突变,整个计算域的网格划分如图3。
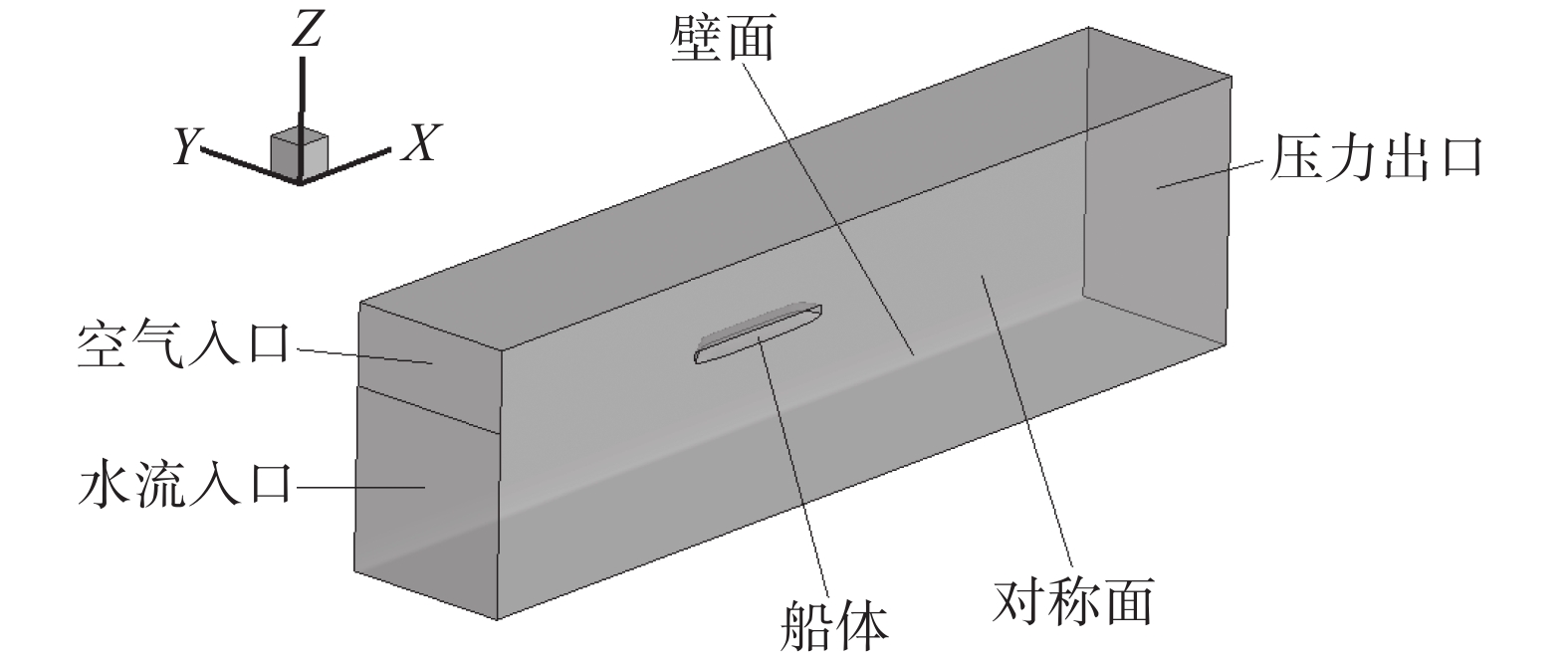 图 2 计算域和边界条件下载:
全尺寸图片
图 2 计算域和边界条件下载:
全尺寸图片
 图 3 流体域和船模网格下载:
全尺寸图片
图 3 流体域和船模网格下载:
全尺寸图片
3. 数值方法验证
本文数值模拟中,网格质量、数量和时间步长都对结果的准确性有较大影响,因此为了保证数值模拟的准确性,并提高求解效率,需首先进行网格与时间步长无关性验证,同时将数模结果与实验值进行对比,进一步验证数值方法的准确性。本文设置4种不同数量网格(50万、80万、100万、140万)与3种不同时间步长(0.01 s、0.005 s、0.002 s)分别计算船模静水阻力,相应结果分别如表2、图4。
表 2 在0.6 m/s流速时不同网格静水阻力结果静水阻力 网格数 60万 80万 100万 140万 计算结果/N 1.0932 1.1747 1.1760 1.1486 误差/% −8.35 −1.53 −1.43 −3.72 经网格数量与时间步长无关性验证后,本文选取100万网格、时间步长0.005 s进行浮体水动力的计算求解。网格无关性验证中140万网格误差略微大于100万网格误差。为了便于生成结构网格,改变了船体水面以上部分形状。对“SEAFOX”浮体进行阻力计算,并与已有实验值比较,如图5所示。
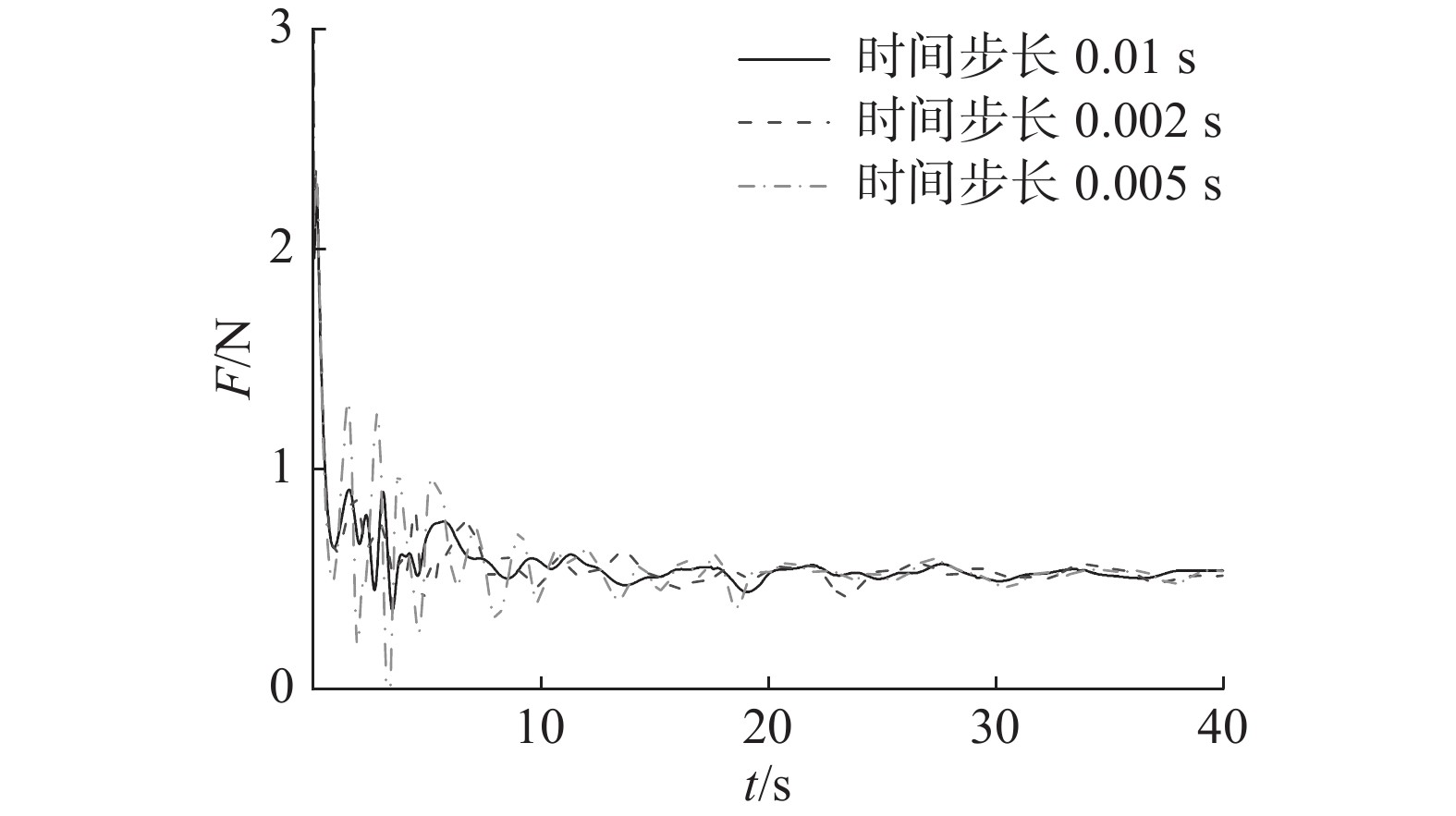 图 4 浮体阻力时历变化曲线下载:
全尺寸图片
图 4 浮体阻力时历变化曲线下载:
全尺寸图片
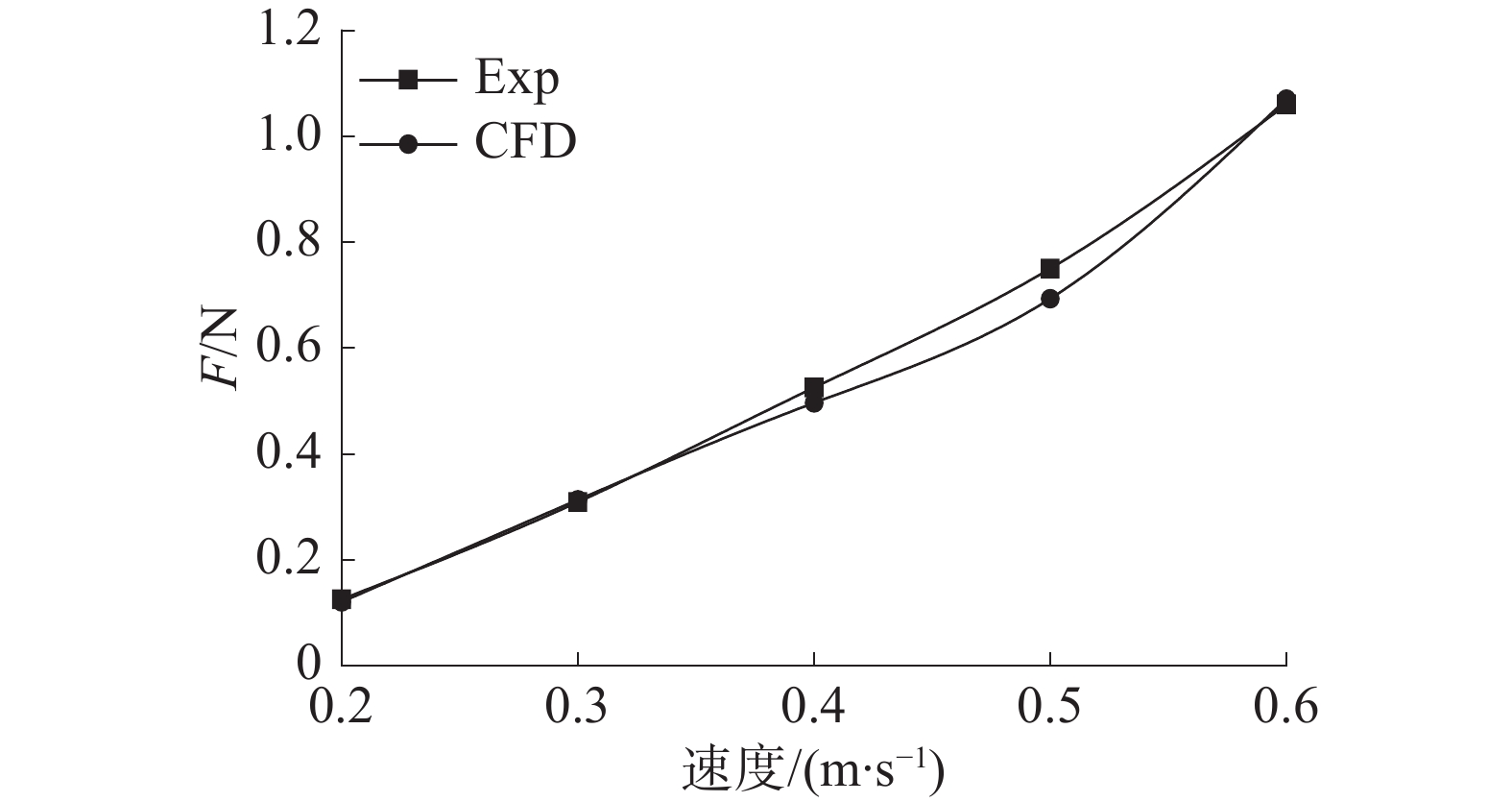 图 5 浮体阻力值随航速变化对比下载:
全尺寸图片
图 5 浮体阻力值随航速变化对比下载:
全尺寸图片
图5中,船模航速在0.2、0.3、0.4和0.6 m/s的情况下模拟值与实验值误差低于5%,在0.5 m/s时误差偏大接近10%,根据该模型的来源论文可知,该情况可能是实验时数据采集误差造成的。实验数据对比可得,本文所采用的数值方法模拟结果与实验结果吻合较好,故可用于后续小型无人双体船数值模拟的研究。
4. 非对称片体双体船的水动力分析
常规双体船多采用细长片体结构和尖削的船艏,片体间距较大,这种结构有利于减少阻力,提高船舶稳定性和安全性。但与单体船相比,双体船2片体间存在流场干扰效应,研究表明该效应对双体船的航行性能不利。而非对称双体船可克服该不利效果,目前已开发的该类型双体船主要有2种,1种由2个不同尺度和排量的片体组成,另1种则是由2个非对称半体组成但整体对称[10,12-13]。本文则是以第2类非对称双体船为研究对象,对比分析4种船型的水动力性能情况,如图6所示。其中, A、B船型为不同瘦削系数的常规双体船(瘦削系数[14]L/
$\Delta $ 1/3是影响穿浪双体船剩余阻力的关键因素之一, 瘦削系数越大, 剩余阻力系数减小,定义$ L/{\Delta ^{1/3}} = {(L/b)^{2/3}} \times {(b/T)^{1/3}}/{C_B}^{1/3} $ ),船型A片体偏细长,船型B片体偏肥大;船型C和D以船型B为基础,靠外侧半个片体保持不变,改变内侧半个片体型线使其变细长,C、D单片体不对称但组成的双体船整体左右对称,相应各船型主尺度如表3所示。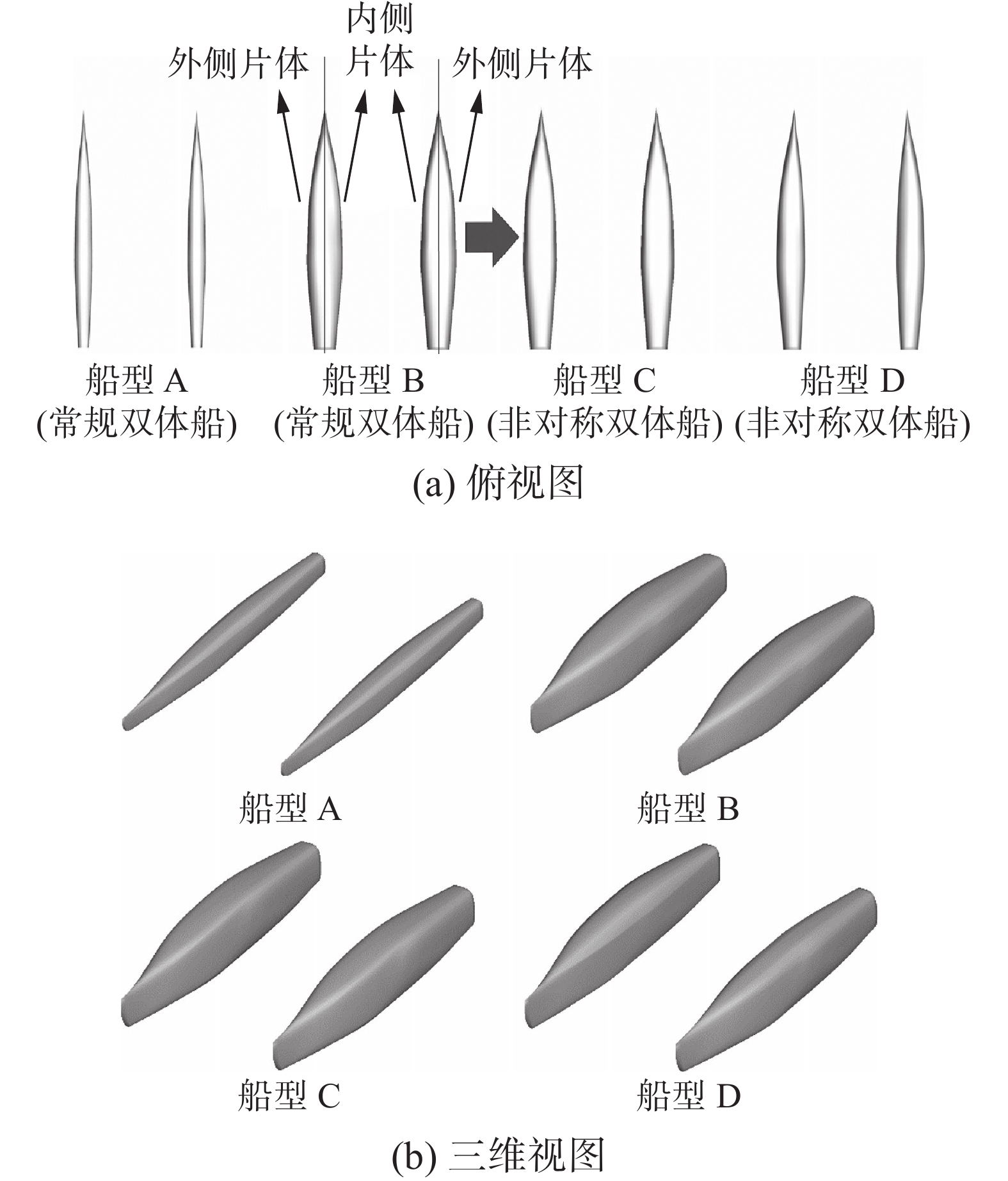 图 6 不同船型示意下载:
全尺寸图片
表 3 不同船型主尺度
图 6 不同船型示意下载:
全尺寸图片
表 3 不同船型主尺度m 主尺度 船型A 船型B 船型C 船型D 船长 3.000 3.000 3.000 3.000 水线长 2.995 2.995 2.995 2.995 船宽 1.510 1.620 0.407 1.554 片体宽度 0.220 0.440 0.407 0.374 吃水 0.160 0.320 0.320 0.320 片体间距 1.400 1.400 1.400 1.400 4.1 非对称片体双体船的静水阻力
对非对称片体双体船型C、D不同航速下的静水阻力进行求解,并以常规双体船型A、B的静水阻力作为比较。其中,船型A、B双体阻力和2倍的单体阻力如图7所示,船型A、B、C、D的静水阻力如图8所示。
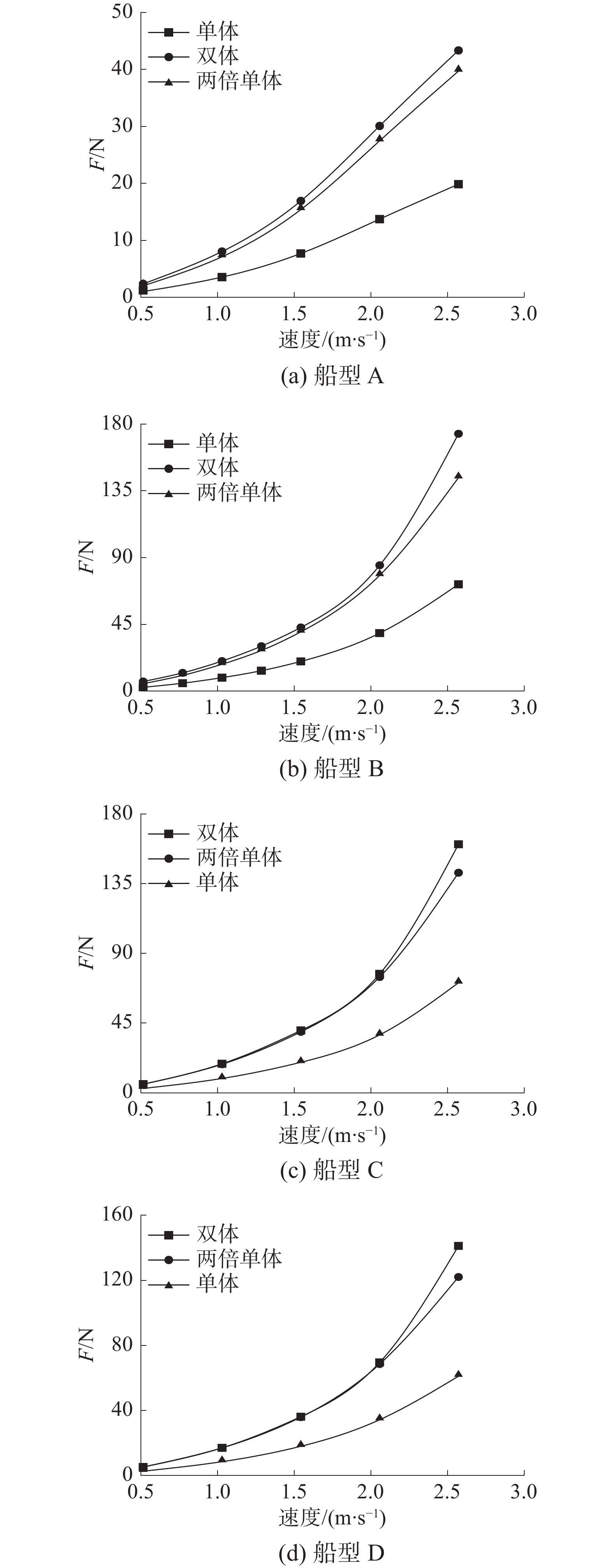 图 7 不同航速下4种船型单体和双体静水阻力下载:
全尺寸图片
图 7 不同航速下4种船型单体和双体静水阻力下载:
全尺寸图片
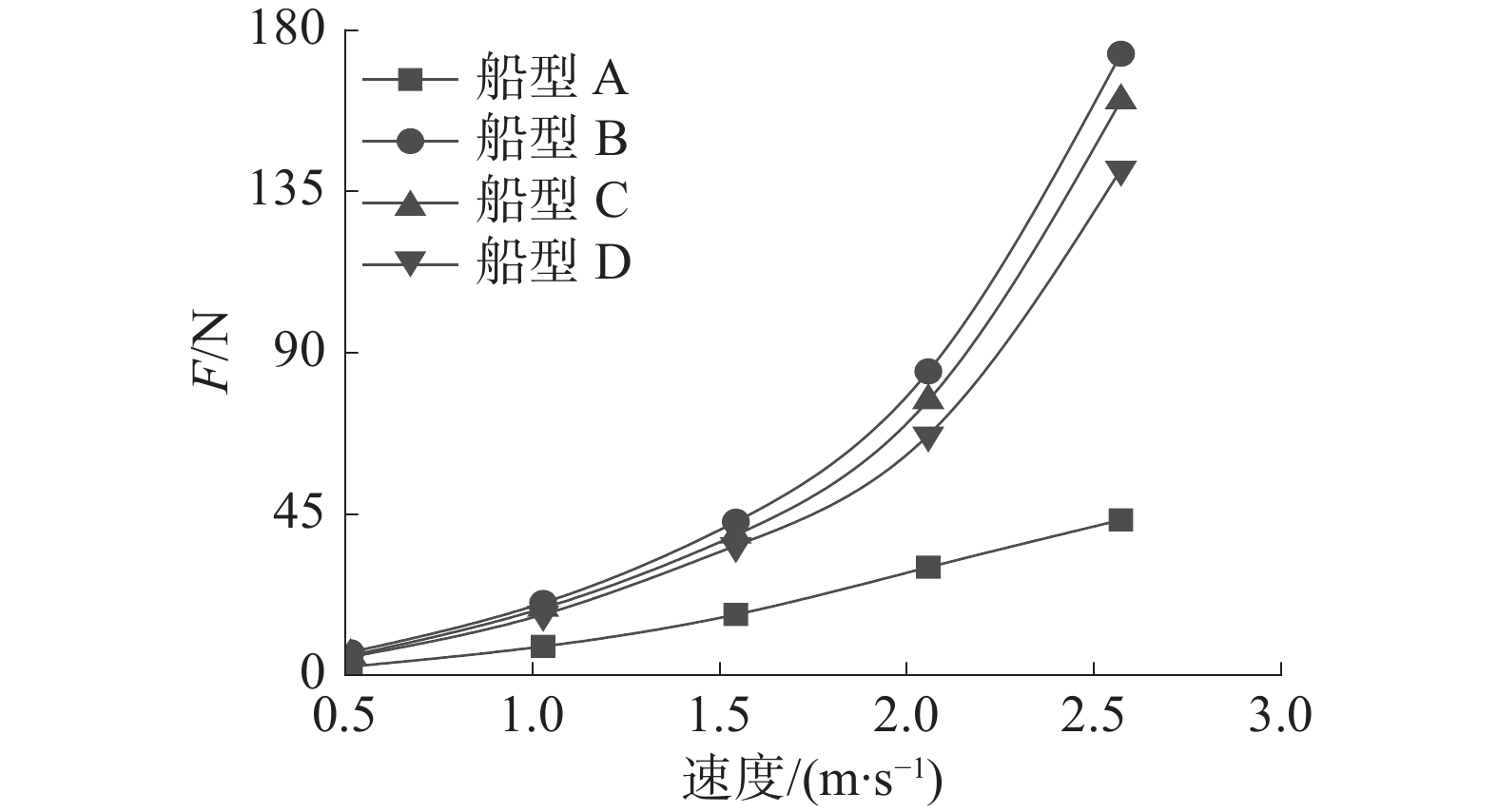 图 8 不同航速下不同船型静水阻力下载:
全尺寸图片
图 8 不同航速下不同船型静水阻力下载:
全尺寸图片
由图7和图8可知,船型A、B、C、D阻力随流速的变化趋势相同。在低航速区域,阻力增长趋势较为平缓;但随航速的增加,浮体阻力增长速率变快,同时片体宽度和排水量越大的船型静水阻力越大。船型C相比于船型B片体宽度和排水量均小了7.5%,平均阻力降低了9.52%。船型D相比于船型B片体宽度和排水量均小15%,平均阻力降低了18.29%。对于船型A、B、C、D双体情况阻力均大于2倍的单体阻力,说明双体船片体之间存在干扰效应,且对船体快速性有负面影响。
4.2 非对称双体船片体间横向力
常规双体船航行过程中2个片体并列航行,片体兴起的波系会互相作用,导致单个片体两侧流场不对称,使得片体受到1个垂直于龙骨方向的横向力,对双体船连接桥会造成一定的载荷。而非对称片体由于片体两侧型线不对称,在流场中会产生另外1个横向力,通过调节片体非对称程度可以在一定程度上抵消片体间干扰效应带来的片体横向力,从而优化双体船性能。
前述4种船型不同航速下阻力的时历曲线如图9所示。
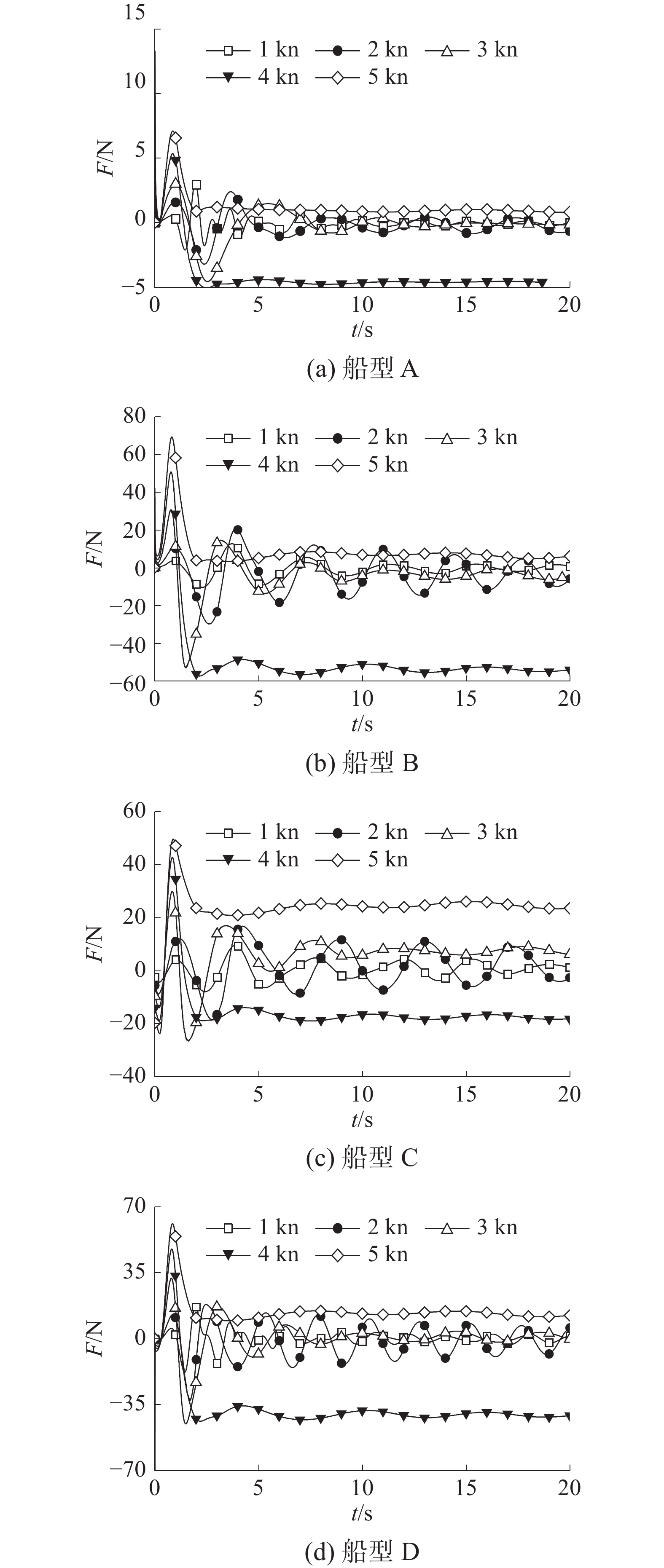 图 9 不同航速下不同船型横向力时历曲线下载:
全尺寸图片
图 9 不同航速下不同船型横向力时历曲线下载:
全尺寸图片
由图9可以发现船型A、B、C、D横向力随航速变化趋势相同,在1~3 kn时片体横向力在0 N左右呈现波动状态,这种情况下,双体船连接桥会受到波动的作用力。在4 kn时,片体横向力相对平稳,且达到1个较大的负值,说明此时双体船2个片体受到1个较大的相吸力。在5 kn时,片体间横向力达到1个稳定的正值,2个片体受到1个稳定的排斥力。当模型航速从4 kn变化到5 kn的过程中,片体从受到较大的吸引力变化为受到较大的排斥力,这个过程对双体船连接桥强度要求最大。同时在1~3 kn时片体横向力呈现波动状态,对连接桥强度也有一定要求。船型C和D是在常规双体船B的基础上进行一定修改得到的非对称船体,取船型连续多个完整周期的横向力作为为船型平均横向力得到图10。
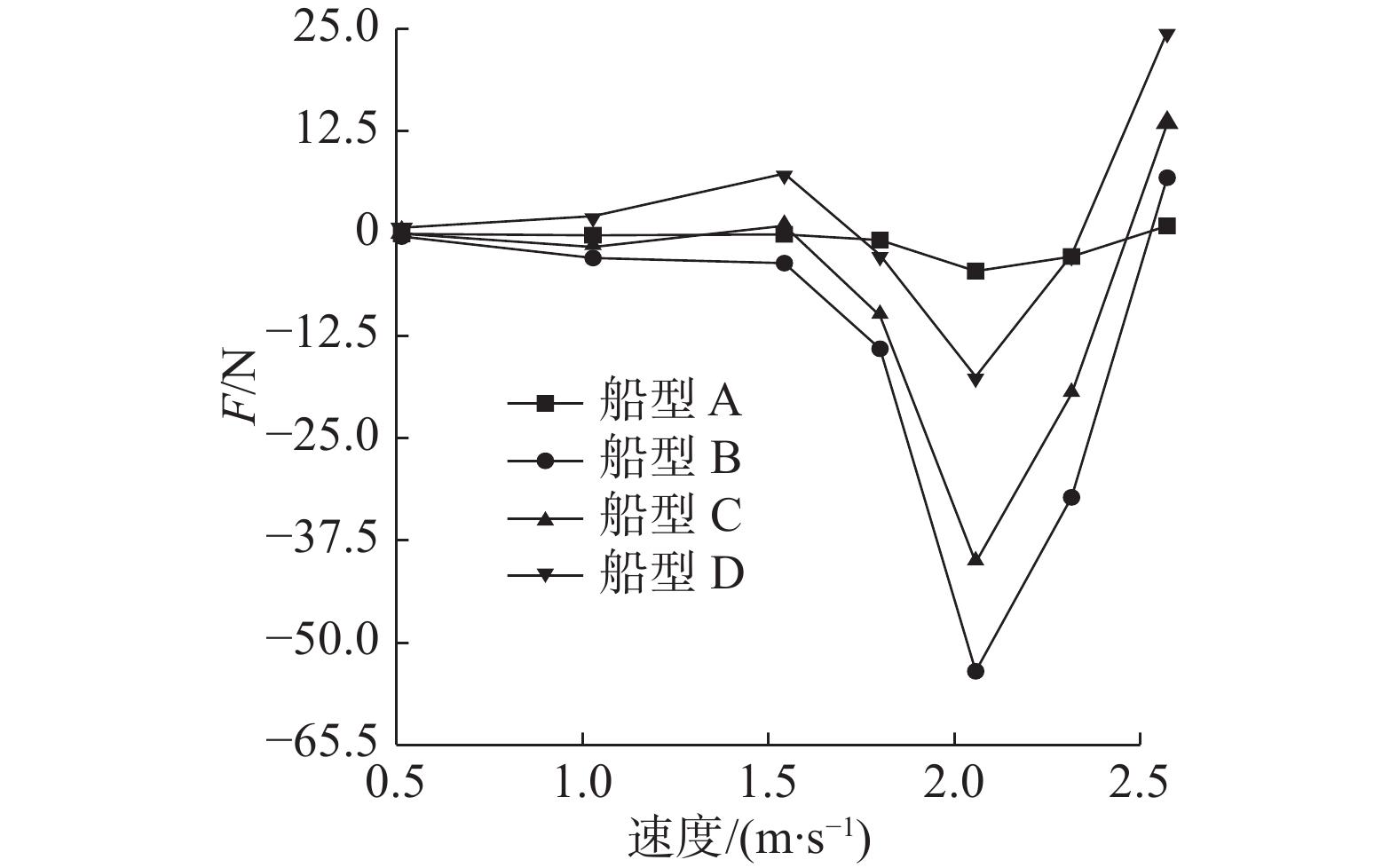 图 10 不同航速下不同船型平均横向力下载:
全尺寸图片
图 10 不同航速下不同船型平均横向力下载:
全尺寸图片
相比于常规双体船B,船型C在1~4 kn均明显减小了平均横向力,但是在5 kn时平均横向力一定程度增大,说明此模型在中低速条件下有一定优势。船型D则大幅度减小了4 kn时出现的最大横向力,并且在3.5~4.5 kn时减小船舶横向力效果明显,有效减小了连接桥可能会承受的最大载荷。相比于船型B,非对称船体C、D从不同方面有效降低了连接桥载荷,同时也一定程度上减小了静水阻力,排水量仅仅分别减小了7.5%和15%。
4.3 非对称双体船片体间横向力
一般来说双体船2个片体之间的干扰效应被认为是一种不利的流固相互作用,干扰效应的大小与航速、片体间距和船型均有很大关系。随着傅汝德数Fr的增长,双体船航态发生变化,吃水面积也会发生变化,兴波阻力占比逐渐增大,自由液面形状也会变得复杂[15]。同时由于干扰效应作用,片体内外两侧吃水面积、吃水形状、兴波状态和水流速度均有很大差别,尤其是高航速、宽片体的情况下该现象更加明显。由图11可以发现航速较低时兴波相对较小,片体间存在微弱的周期性干扰,对应了图9片体间横向力在航速1~3 kn时在0 N作用波动。而4~5 kn航速时,兴波范围和幅度变大,片体波系干扰明显,片体两侧流场和吃水范围明显不同,也对应了图9中片体在4 kn时有较大的相吸力,在5 kn时有较大的排斥力。相比于常规双体船B,非对称双体船C和D两片体之间的自由液面相对平稳,兴波幅度有所降低,但片体外侧兴波范围和程度与常规双体船B基本相同。同时相比于常规双体船B,非对称双体船尾流存在相互靠近的趋势,航速越高、片体非对称程度越高,该现象越明显。
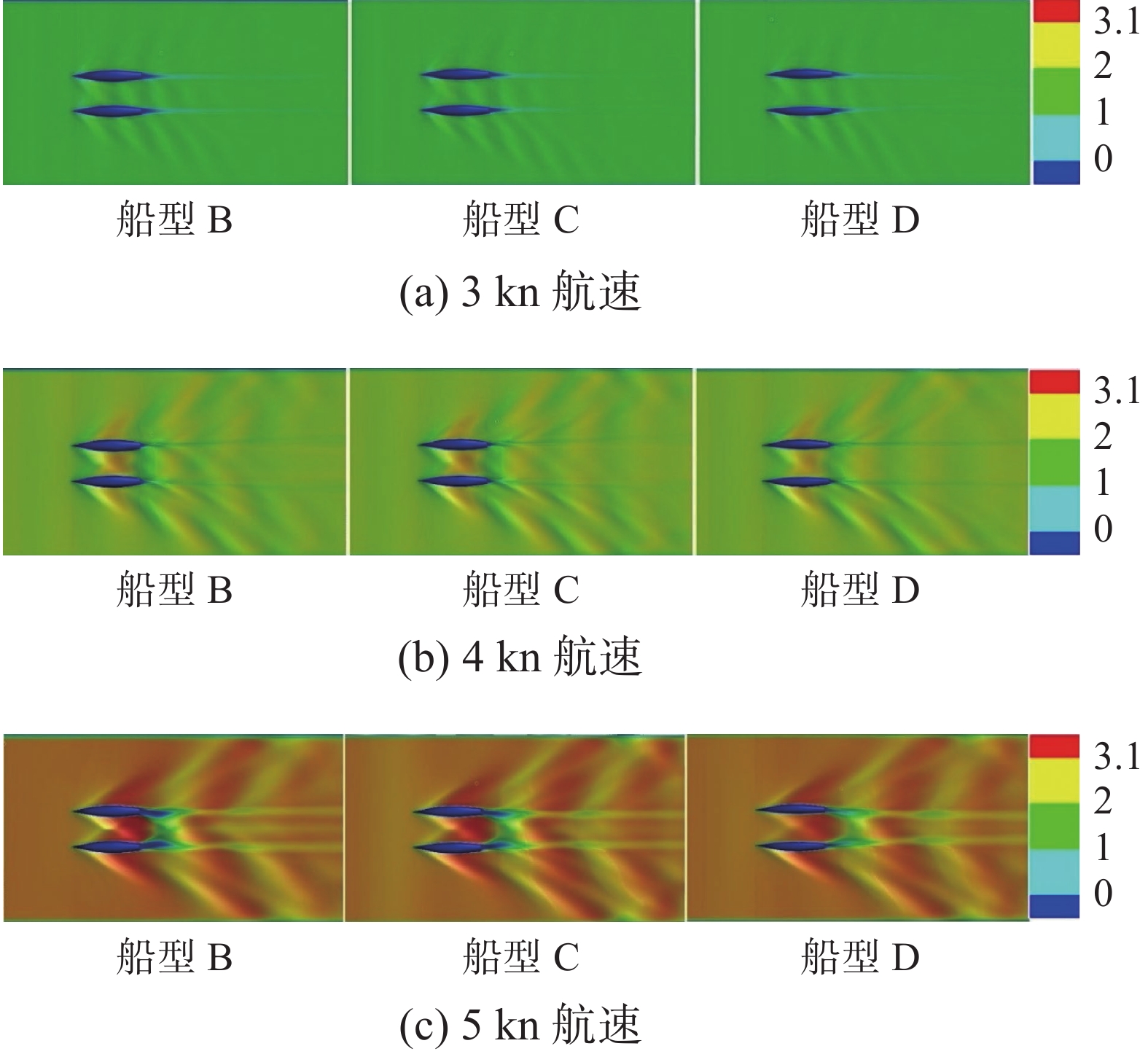 图 11 船型B、C、D自由液面速度分布下载:
全尺寸图片
图 11 船型B、C、D自由液面速度分布下载:
全尺寸图片
对于以上4个船型,4 kn航速时片体间吸力最大,以4 kn航速时为例,分析其内外侧吃水情况(如图12所示)。双体船航行过程中会引起稳定的兴波,所以片体首部和尾部吃水较大,片体中部吃水较小。同时片体内外两侧流场不对称,兴波程度和自由液面不同,导致片体两侧吃水面积和范围也不相同,对应了双体船航行过程中片体受到的横向力。对比船型B、C、D发现,3个船型片体外侧吃水分布和形状基本相同,而片体内侧吃水区别较大,船型B片体内侧水线波动较大,船型C片体内侧水线波动幅度相对较小,船型D水线最为平稳,波动幅度最小。说明非对称片体通过改变内侧半个片体的型线,可以使得2个片体之间的自由液面相对平稳,从而减小干扰效应带来的影响。同时通过调节一侧型线也能改变片体吃水分布,达到减小片体间横向力的效果,降低双体船连接桥载荷。
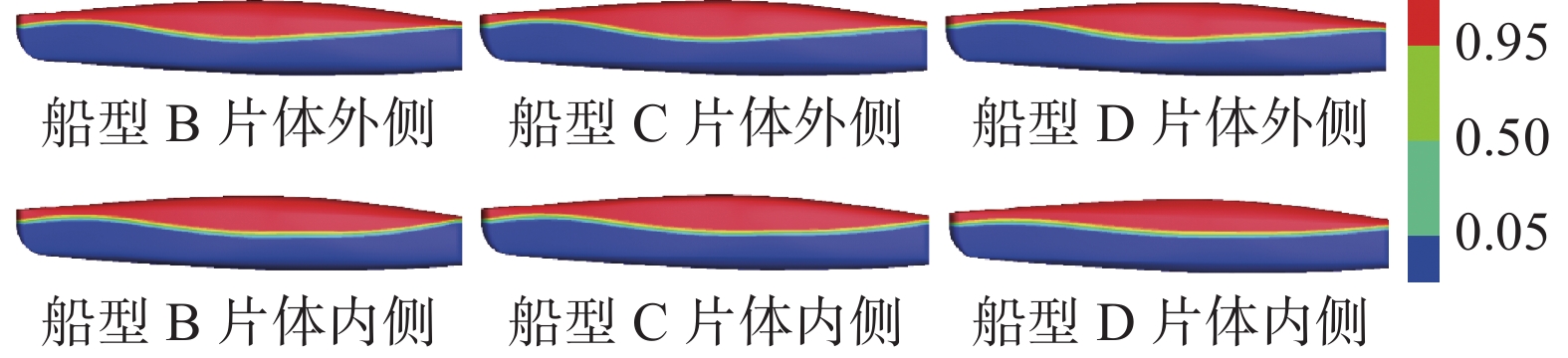 图 12 船型B、C、D片体两侧吃水情况下载:
全尺寸图片
图 12 船型B、C、D片体两侧吃水情况下载:
全尺寸图片
5. 结论
本文基于海洋无人双体帆船为背景,建立了2种不同瘦削系数的常规双体船型以及2种非对称片体双体船型,通过数值模拟的方法研究了不同船型的阻力性能和片体间作用力。
对比发现瘦削型常规双体船具优秀的阻力性能,适用于高速航行,但是载重能力不足。肥大型常规双体船载重能力优秀,缺点是阻力大,两片体间干扰强,且片体间存在互相作用产生一定的横向力。非对称片体结构通过改变片体单侧型线,调节片体两侧流场、兴波幅度和吃水分布,从而降低了片体间干扰效应,一定程度上抵消了片体间的横向力。非对称双体船能够明显降低片体之间的横向力,优化船舶阻力,同时保证足够的载重能力,平衡了双体船载重能力、阻力性能和结构强度3种因素。
此外,使用重叠网格技术开放自由度计算船舶静水阻力更加符合实际情况,但是对计算机算力要求较高;而本文涉及船型在1~5 kn航速下Fr均小于0.8,即其重力由浮力平衡,处于排水航行状态,对比分析发现,这种状态下的数值模拟是否开放自由度对结果影响极小,因此使用固定船舶自由度的方式进行模拟分析的方法是可行的。
-
图 1 “SEAFOX”浮体模型与实验
下载:
全尺寸图片
图 2 计算域和边界条件
下载:
全尺寸图片
图 3 流体域和船模网格
下载:
全尺寸图片
图 4 浮体阻力时历变化曲线
下载:
全尺寸图片
图 5 浮体阻力值随航速变化对比
下载:
全尺寸图片
图 6 不同船型示意
下载:
全尺寸图片
图 7 不同航速下4种船型单体和双体静水阻力
下载:
全尺寸图片
图 8 不同航速下不同船型静水阻力
下载:
全尺寸图片
图 9 不同航速下不同船型横向力时历曲线
下载:
全尺寸图片
图 10 不同航速下不同船型平均横向力
下载:
全尺寸图片
图 11 船型B、C、D自由液面速度分布
下载:
全尺寸图片
图 12 船型B、C、D片体两侧吃水情况
下载:
全尺寸图片
表 1 浮体主尺度
主尺度 参数值 船模型长/m 2.40 船模型宽/m 0.70 设计吃水/m 0.15 设计排水量/kg 147.00 表 2 在0.6 m/s流速时不同网格静水阻力结果
静水阻力 网格数 60万 80万 100万 140万 计算结果/N 1.0932 1.1747 1.1760 1.1486 误差/% −8.35 −1.53 −1.43 −3.72 表 3 不同船型主尺度
m 主尺度 船型A 船型B 船型C 船型D 船长 3.000 3.000 3.000 3.000 水线长 2.995 2.995 2.995 2.995 船宽 1.510 1.620 0.407 1.554 片体宽度 0.220 0.440 0.407 0.374 吃水 0.160 0.320 0.320 0.320 片体间距 1.400 1.400 1.400 1.400 -
[1] YANG An, YU Jiancheng, ZHANG Jin. Autonomous sailboat design: a review from the performance perspective[J]. Ocean engineering, 2021, 238: 1−16. [2] 俞建成, 孙朝阳, 张艾群. 无人帆船研究现状与展望[J]. 机械工程学报, 2018, 54(24): 98−110. [3] ELKAIM G H, BOYCE C O L. Experimental validation of GPS-based control of an unmanned wing-sailed catamaran[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation. Fort Worth: The Institute of Navigation, 2007: 1950-1956. [4] 姜帆, 李云波, 闫凤超, 等. 基于OpenFOAM的非对称双体船操纵性预报及运动特性研究[J]. 中国造船, 2021, 62(2): 14−24. doi: 10.3969/j.issn.1000-4882.2021.02.002 [5] 章易立. 小水线面双体船波浪增阻特性与运动仿真研究[D]. 镇江: 江苏科技大学, 2019. [6] TARAFDER M S, SUZUKI K. Computation of wave-making resistance of a catamaran in deep water using a potential-based panel method[J]. Ocean engineering, 2007, 34(13): 1892−1900. doi: 10.1016/j.oceaneng.2006.06.010 [7] WANG Xianzhou, LIU Liwei, ZHANG Zhiguo, et al. Numerical study of the stern flap effect on catamaran’ seakeeping characteristic in regular head waves[J]. Ocean engineering, 2020, 206: 1−14. [8] HU Jingfeng, ZHANG Yihan, WANG Ping, et al. Numerical and experimental study on resistance of asymmetric catamaran with different layouts[J]. Brodogradnja, 2020, 71(2): 91−110. doi: 10.21278/brod71206 [9] SOUTO-IGLESIAS A, FERNANDEZ-GUTIERREZ D, PEREZ-ROJAS L. Experimental assessment of interference resistance for a Series 60 catamaran in free and fixed trim-sinkage conditions[J]. Ocean engineering, 2012, 53: 38−47. doi: 10.1016/j.oceaneng.2012.06.008 [10] YENGEJEH M A, AMIRI M M, MEHDIGHOLI H, et al. Numerical study on interference effects and wetted area pattern of asymmetric planing catamarans[J]. Proceedings of the institution of mechanical engineers, Part M:journal of engineering for the maritime environment, 2016, 230(2): 254−273. [11] 邱鹏, 何钰璋, 李国诚. 船舶阻力数值计算研究[J]. 中国水运, 2021(1): 121−123. doi: 10.13646/j.cnki.42-1395/u.2021.01.045 [12] HAJIABADI A, SHAFAGHAT R, MOGHADAM H K. A study into the effect of loading conditions on the resistance of asymmetric high-speed catamaran based on experimental tests[J]. Alexandria engineering journal, 2017, 57(3): 1713−1720. [13] 张艺瀚, 王平, 胡景丰. 不对称双体船非线性横摇阻尼及横摇运动分析[J]. 华南理工大学学报(自然科学版), 2021, 49(7): 26−33. [14] 马健, 张再夫, 李惠敏. 穿浪双体船剩余阻力影响因素分析及总阻力预报方法[J]. 船舶力学, 2011, 15(Z1): 32−39. doi: 10.3969/j.issn.1007-7294.2011.01.005 [15] HONARYAR A, GHIASI M, LIU P, et al. A new phenomenon in interference effect on catamaran dynamic response[J]. International journal of mechanical sciences, 2020, 190: 1−16.




