Analysis of hydrodynamic characteristics of dynamic swimming based on CFD technology
-
摘要: 为了了解和改善游泳动作效率,提出一种基于计算流体动力学(CFD)技术的三维动态游泳数值模拟方法,以海豚泳为例,对游泳的水动力特性进行探讨。遵循人体关节运动规律,提出游泳运动员模型刚体化的假设,建立多体运动游泳数值计算模型,并通过三维不可压缩Navier-Stokes方程结合RNGk-ε 湍流模型进行求解,探讨了海豚泳游动过程中的整体与各躯体部位(上肢、胸部、腰部、大腿、小腿、脚掌)的水动力特征。研究结果表明,在海豚泳中,推进力的产生与膝关节伸展运动密切相关;在向上打腿和向下打腿的过程中,脚掌均为主要的推进力来源部位,小腿和大腿的运动,是净阻力的主要来源,腰部上下摆动所做的正功要大于负功。结论可应用于指导游泳运动员入水和转身后海豚泳技术动作的改进。Abstract: In order to understand and improve the efficiency of swimming movements, a three-dimensional dynamic swimming numerical simulation method based on computational fluid dynamics (CFD) technology is proposed in this paper, and the hydrodynamic characteristics of swimming are discussed by taking dolphin swimming as an example. Based on the rules of human joint movement, the hypothesis of the rigid body of the swimmer's model is proposed. On this basis, a multi-body swimming numerical calculation model is established. The three-dimensional incompressible Navier-Stokes equation combined with RNG k-ε turbulence model is used for multi-body swimming numerical calculation. The hydrodynamic characteristics of the whole body and the body parts (upper limbs, chest, waist, thighs, calfs and soles) during the swimming process are discussed. The results indicate that in dolphin swimming, the propulsive force is closely related to knee stretching, and that in the process of up kick and down kick, the sole of the foot is the main source of propulsion force, the movement of the calf and thigh is the main source of net resistance, and the waist does more positive work than negative work during the process of swinging up and down. The conclusion of this study can provide guidance for the improvement of dolphin swimming technique after swimmers’ entry and turn.
-
Keywords:
- swimming /
- CFD /
- multi-body movement /
- dynamic movement /
- hydrodynamic characteristics /
- drag /
- propulsion /
- dolphin swimming
-
自20世纪初国际游泳联合会成立以来,竞技游泳方兴未艾,目前已发展成为奥运第2大项目,其泳姿也从最早的单泳姿势发展到囊括自由泳、蛙泳、仰泳和蝶泳4大竞技泳姿[1]。近年来,我国竞技游泳水平整体呈良好的上升态势,对加快推进体育强国建设发挥了重要的积极作用。尽管如此,我国游泳竞技水平与欧美等体育强国(如美国、澳大利亚等)相比依然存在着较大的差距,特别是以科技辅助手段为主的质量训练方面,还有较大的提升空间。
质量训练首要点是要明确练什么的问题,随后是解决怎么练以及如何控制的问题。对于竞技游泳,实现减低阻力及提升推进力是游泳训练的首要点,而运用技术手段分析运动员与水的相互作用关系,探究游动过程中的阻力与推进力的产生机理,进而提出技术动作的优化方案,是当前提升竞技游泳性能的有效手段[2-3]。长期以来,基于仪器设备对真实运动员进行试验测试的研究方法在认识游泳运动与提升技术动作性能中发挥了重要的作用[4],尽管如此,游泳科研人员在研究过程中也逐渐意识到这种传统的游泳研究手段具有试验成本较高、可重复性低的缺点,且对于绝大多数的测试研究,只能着重于试验数据或图像的分析推理,对游泳运动现象背后的本质机理较难给出说服性解释[5]。近十几年来,随着计算机技术的快速发展及数值算法的逐步成熟,计算机数值模拟技术作为一种新的游泳研究手段引起了越来越多的游泳科研人员关注。与传统的游泳测试方法相比,该方法具有研究周期短、实验成本低和计算结果可视化的特点,给深入分析游泳水动力学机理提供了极大的便利。自1996年Bixler等[6]将数值模拟技术应用于游泳研究后,基于该技术的游泳技术动作仿真分析逐渐成为了游泳研究的新热点。Lyttle等[7]采用准稳态模拟方法对海豚泳进行了模拟研究,结果显示打腿效率与幅度成正比关系,且大部分推进力来自腿部而不是脚掌。然而,在后续的研究中,学者们发现在游泳问题中流场的不稳定性是不可被忽视的,准稳态模拟方法并不适用于动态的游泳问题研究[8],大量的研究显示脚掌才是打腿游进过程中产生推进力的关键部位[9-11]。Mittal等[12]使用浸入边界法实现了海豚泳泳姿的高逼真度模拟分析,在此基础上Von Loebbecke等[8,13]将浸入边界法与LES湍流模型结合测算出海豚泳打腿效率为11%~29%;Cohen等[14-15]采用光滑粒子流体动力学法,建立可满足复杂几何结构大变形运动的游泳数值模型,并研究了不同打腿频率和不同踝关节跖屈−背屈角度对水下打腿的影响,结果显示伸展打腿阶段产生了最大的推进力,并且加快打腿频率能够增大游进速度,而在一个打腿周期中游进方向阻力值对踝关节跖屈−背屈角度相对不敏感。此外,Nakashima 等[16]应用游泳运动员模型法评估了躯干波动对游泳性能的影响,发现动态游进过程中胸部适当地上下波动可以提高推进效率。当前,围绕动态游泳问题的数值研究得到了较快的发展,然而由于人体游动过程中涉及复杂的肢体方位、关节形态及自由水面实时变化等综合问题,大多数游泳数值模拟研究主要集中在较为简单的肢体分解动作或小幅度的变形运动分析方面[3],能够广泛应用于游泳实践的通用游泳数值模拟方法仅被国外极少数技术团队掌握。
本研究提出一种基于计算流体动力学(computational fluid dynamics,CFD)技术的通用三维游泳运动数值模拟策略。该游泳数值模拟策略从人体游泳运动规律出发,提出游泳运动员模型刚体化的假设,并对运动员模型的运动关节进行精细分离,将人体形态变形运动转化成各个独立肢体的刚体方位变化运动,以解决因形体变化引起的网格畸形问题,并通过三维不可压缩Navier-Stokes方程结合RNGk-
$ \varepsilon$ 湍流模型进行求解,实现对游泳动态问题的仿真分析。本文以海豚泳为例,对其运动过程中的整体与各肢体水动力特性进行分析。1. 研究方法
1.1 游泳运动员模型处理
本研究选取一名高校优秀游泳运动员(身高178 cm,体重71 kg)为型体采样对象。图1为人体模型的制作过程。
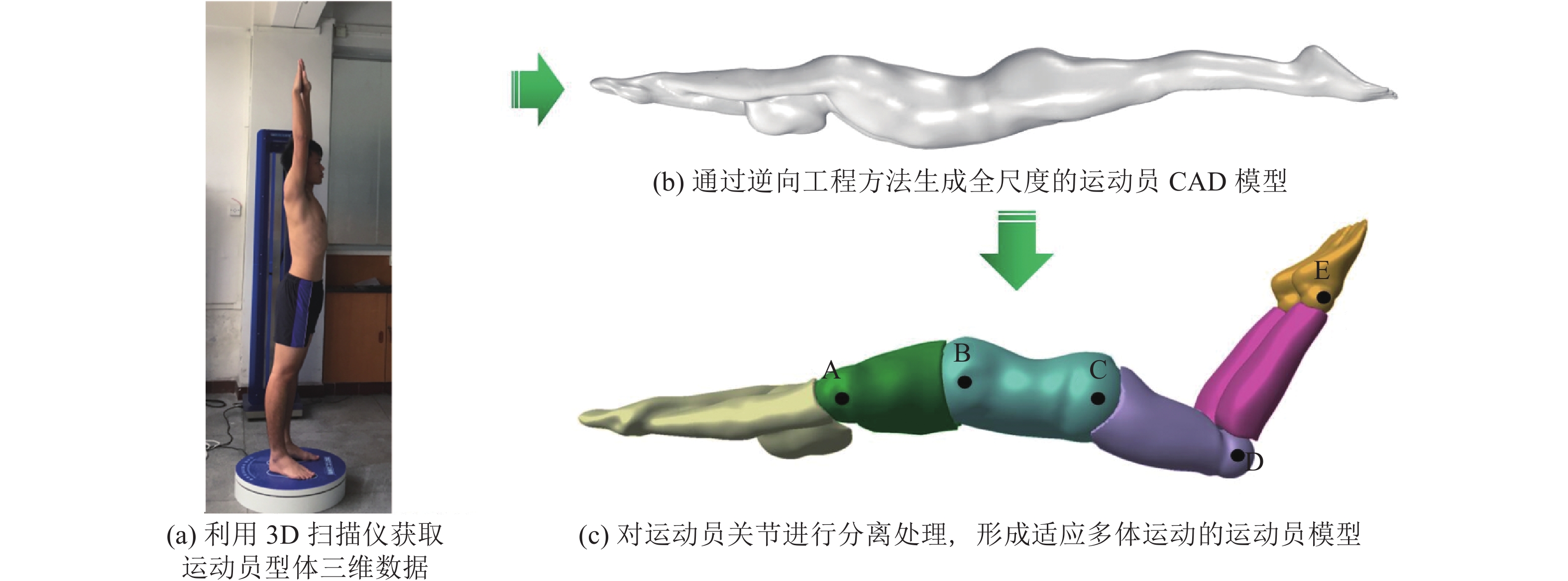 图 1 游泳运动员模型处理过程
图 1 游泳运动员模型处理过程 下载:
全尺寸图片
下载:
全尺寸图片
首先,通过人体3D扫描仪(Zbot SCAN-1X)获取运动员型体三维点云数据(如图1(a)所示),并结合逆向工程方法生成全尺度运动员CAD模型(如图1(b)所示);随后,依据人体运动规律,对运动员模型关节部位进行拆分,使修改后的运动员模型能够通过肢体的刚体运动替代身体的变形运动。根据海豚泳的运动特点,运动员的身体被分离为6组独立刚体,对应的分离处从头部至脚掌依次为肩膀处、上腹部处、髋关节处、膝盖处和脚踝处,如图1(c)所示。
1.2 控制方程
在本研究中,假定水为不可压缩的粘性流体,流体的控制方程为不可压缩黏性流体的Navier-Stokes方程和连续性方程。
$$ \left\{ \begin{gathered} \frac{\partial }{{\partial {x_i}}}({u_i}) = 0 \\ \frac{\partial }{{\partial t}}({u_i}) + \frac{\partial }{{\partial {x_j}}}({u_i}{u_j}) = - \frac{1}{\rho }(\frac{{\partial p}}{{\partial {x_i}}}) + {g_i} + \frac{\partial }{{\partial {x_j}}}(\nu \frac{{\partial {u_i}}}{{\partial {x_j}}}) \\ \end{gathered} \right. $$ 式中:
$ \rho $ 为流体密度;$ {u_i} $ 和$ {u_j} $ 为速度矢量组成部分;$ p $ 为压强;$ {{\text{g}}_i} $ 为重力加速度;$ \nu $ 是动力黏性系数;$ i,j = 1,2,3 $ 是三维流动方向。此外,选用工程中较为普遍采用的RNG$ k - \varepsilon $ 湍流模型对控制方程封闭求解。$$ \left\{ \begin{gathered} \frac{\partial }{{\partial t}}(\rho k) + \frac{\partial }{{\partial {x_i}}}(\rho k{u_i}) = \frac{\partial }{{\partial {x_j}}}({\alpha _k}{\mu _{{\rm{eff}}}}\frac{{\partial k}}{{\partial {x_j}}}) + \\ {G_k} + {G_b} - \rho \varepsilon + {S_k} \\ \frac{\partial }{{\partial t}}(\rho \varepsilon ) + \frac{\partial }{{\partial {x_i}}}(\varepsilon {u_i}) = \frac{\partial }{{\partial {x_j}}}({\alpha _\varepsilon }{\mu _{{\rm{eff}}}}\frac{{\partial \varepsilon }}{{\partial {x_j}}}) + \\ {G_{1\varepsilon }}\frac{\varepsilon }{k}({G_k} + {C_{3\varepsilon }}{G_b}) - {C_{2\varepsilon }}\rho \frac{{{\varepsilon ^2}}}{k} - {R_\varepsilon } + {S_\varepsilon } \\ \end{gathered} \right. $$ 式中:
$ {x_i} $ 为3个坐标分量,$ k $ 为湍动能,$ \varepsilon $ 为湍流耗散率,$ {G_k} $ 是由于平均速度梯度而产生的湍动能,$ {G_b} $ 为由浮力确定的湍动能,${\mu _{{\rm{eff}}}}$ 为湍流黏度,$ {C_{1\varepsilon }} $ 、$ {C_{2\varepsilon }} $ 、$ {C_{2\varepsilon }} $ 、${\alpha _k}$ 、${R_\varepsilon }$ 和${\alpha _\varepsilon }$ 为经验常数,$ {S_k} $ 和$ {S_\varepsilon } $ 为自定义源项。为模拟游泳过程中水面的变化情况,本研究采用流体体积法(volume of fluid,VOF)追踪自由水面。体积分数函数
$ {F_q} $ 定义为单元内第q相流所占有体积与该单元的总体积之比。若$ {F_q} = {\text{1}} $ ,则表示单元内全部为第q相流体;若$ {F_q} = {\text{0}} $ ,则表示单元内没有第q相流体;若0<Fq<1,则该单元为交界面单元。本研究中的自由水面问题只涉及包括空气和水两项,故$q$ 为1或2。$ {F_q} $ 方程满足:$$ \left\{ \begin{gathered} \frac{\partial }{{\partial t}}{F_q} + \frac{\partial }{{\partial {x_i}}}({F_q}{u_i}) = 0\, \quad (q = 1,2) \\ {F_1} + {F_2} = 1 \\ \end{gathered} \right. $$ 针对动态游泳问题,本研究引入动网格技术处理运动员肢体位置持续变化的过程。在动网格方法中,对于控制体
$V$ 而言,可以用广义标量$ \varphi $ 的积分形式的守恒方程来表示其边界条件的运动。$$ \begin{array}{c} \dfrac{{\rm{d}}}{{{\rm{d}}t}}\int {_v} \rho \varphi {\rm{d}}V + \int {_{\partial V}} \rho \varphi (\vec {\boldsymbol{u}} - {{\vec {\boldsymbol{u}}}_g}) \cdot {\rm{d}}\vec A = \\ \int {_{\partial V}} \Gamma \nabla \varphi \cdot {\rm{d}}\vec A + \int {_V} {S_\varphi }{\rm{d}}V \\ \end{array} $$ 式中:
$\vec {\boldsymbol{u}}$ 为流体的速度向量,${\vec {\boldsymbol{u}}_g}$ 为网格的移动速度,$ \Gamma $ 为扩散系数,${S_\varphi }$ 为$ \phi $ 的源项。1.3 动作控制
本研究中,运动员被假设成由6组独立刚体组成,运动员的肢体运动方程由标准D-H建模方法推导得出[17]。D-H方法在运动员的每个肢体上设定1个固定的坐标系,然后用4×4的齐次变换矩阵来描述相邻两肢体的空间关系。通过依次变换可最终推导出末端肢体相对于基坐标系的位姿,从而建立游泳运动员的运动学方程。如图2所示,在D-H模型中,各个关节的运动轴设为相对独立的Z轴,X轴是沿2个相邻Z轴的共同法线,Y轴由右手直角坐标系确定。
$ a $ 是相邻2个关节标记点Z轴之间的最小距离,$ \alpha $ 为2个相邻Z轴之间的夹角,$ \theta $ 为2个相邻X轴之间的夹角,$ d $ 为2个相邻公共法线之间的距离。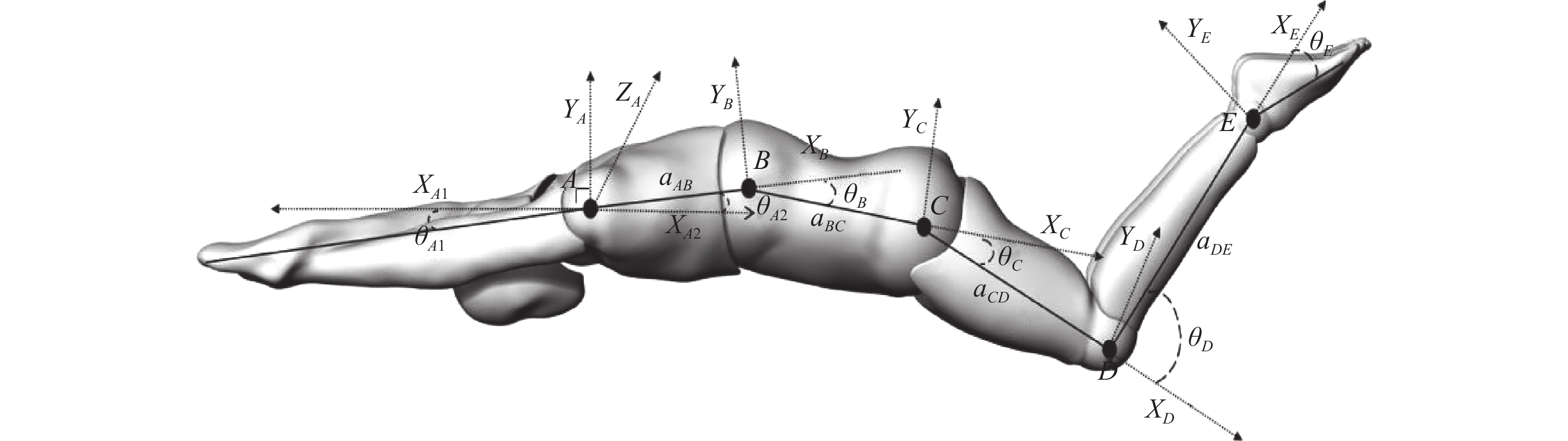 图 2 海豚泳运动员的D-H模型下载:
全尺寸图片
图 2 海豚泳运动员的D-H模型下载:
全尺寸图片
运动肢体之间的位置变换矩阵可以描述为
$$ \begin{array}{l}\qquad {}_{i+1}{}^{i}{\boldsymbol{T}}={\rm{Rot}}(z,{\theta }_{i+1}){\rm{Trans}}(0,0,{d}_{i+1})\times \\ \qquad \quad {\rm{Trans}}({a}_{i+1},0,0){\rm{Rot}}(x,{\alpha }_{i+1})=\\ \left[\begin{array}{cccc}c{\theta }_{i+1}& -s{\theta }_{i+1}& 0& 0\\ s{\theta }_{i+1}& c{\theta }_{i+1}& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\end{array}\right]\times \left[\begin{array}{cccc}1& 0& 0& 0\\ 0& 1& 0& 0\\ 0& 0& 1& {d}_{i+1}\\ 0& 0& 0& 1\end{array}\right]\times \\ \left[\begin{array}{cccc}1& 0& 0& {a}_{i+1}\\ 0& 1& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\end{array}\right]\times \left[\begin{array}{cccc}1& 0& 0& 0\\ 0& c{\alpha }_{i+1}& -s{\alpha }_{i+1}& 0\\ 0& s{\alpha }_{i+1}& c{\alpha }_{i+1}& 0\\ 0& 0& 0& 1\end{array}\right]=\\ \left[\begin{array}{cccc}c{\theta }_{i+1}& -s{\theta }_{i+1}c{\alpha }_{i+1}& s{\theta }_{i+1}s{\alpha }_{i+1}& {a}_{i+1}c{\theta }_{i+1}\\ s{\theta }_{i+1}& c{\theta }_{i+1}c{\alpha }_{i+1}& -c{\theta }_{i+1}s{\alpha }_{i+1}& {a}_{i+1}s{\theta }_{i+1}\\ 0& s{\alpha }_{i+1}& c{\alpha }_{i+1}& {d}_{i+1}\\ 0& 0& 0& 1\end{array}\right]\end{array} $$ 图2为本研究运动员的D-H模型图。其中,A、B、C、D、E分别为肩膀、上腹部、髋关节、膝盖和脚踝的转动中心点,其中
$ {a_{AB}} $ 、$ {a_{BC}} $ 、$ {a_{CD}} $ 和$ {a_{DE}} $ 分别代表A到B、B到C、C到D和D到E的距离,$ {\theta _{A1}} $ 与$ {\theta _{A2}} $ 为上肢和水平位置之间的角度,$ {\theta _B} $ 、$ {\theta _C} $ 、$ {\theta _A} $ 、$ {\theta _E} $ 为相邻关节之间的角度。A点设置为参考原点,B、C、D和E点的运动方程推导公式为
$$ \left\{ \begin{gathered} {}_B^0T = ({}_A^0T)({}_B^AT) \\ {}_C^0T = ({}_A^0T)({}_B^AT)({}_C^BT) \\ {}_D^0T = ({}_A^0T)({}_B^AT)({}_C^BT)({}_D^CT) \\ {}_E^0T = ({}_A^0T)({}_B^AT)({}_C^BT)({}_D^CT)({}_E^DT) \\ \end{gathered} \right. $$ 1.4 数值实现方法
为了降低计算域长度,本研究参考文献[14]拖曳模拟方式,通过设置数值水槽前端的来流速度来模拟运动员的游进状态。运动员运动区域由四面体网格组成,用于满足网格随时间变化不断更新要求。采用ANSYS FLUENT V19.0作为求解平台,控制方程的离散采用有限体积法,利用Pressure-Implicit with Splitting of Operators (PISO)方法进行压力速度耦合,压力插值设置为二阶格式。另外,对流项离散采用二级迎风格式格式,而时间变化项采用一阶隐式。
网格更新同时采用弹簧光顺和局部重构模型进行处理。本研究选用文献[14]运动轨迹,模拟海豚泳运动。
2. 结果与讨论
2.1 方法可行性验证
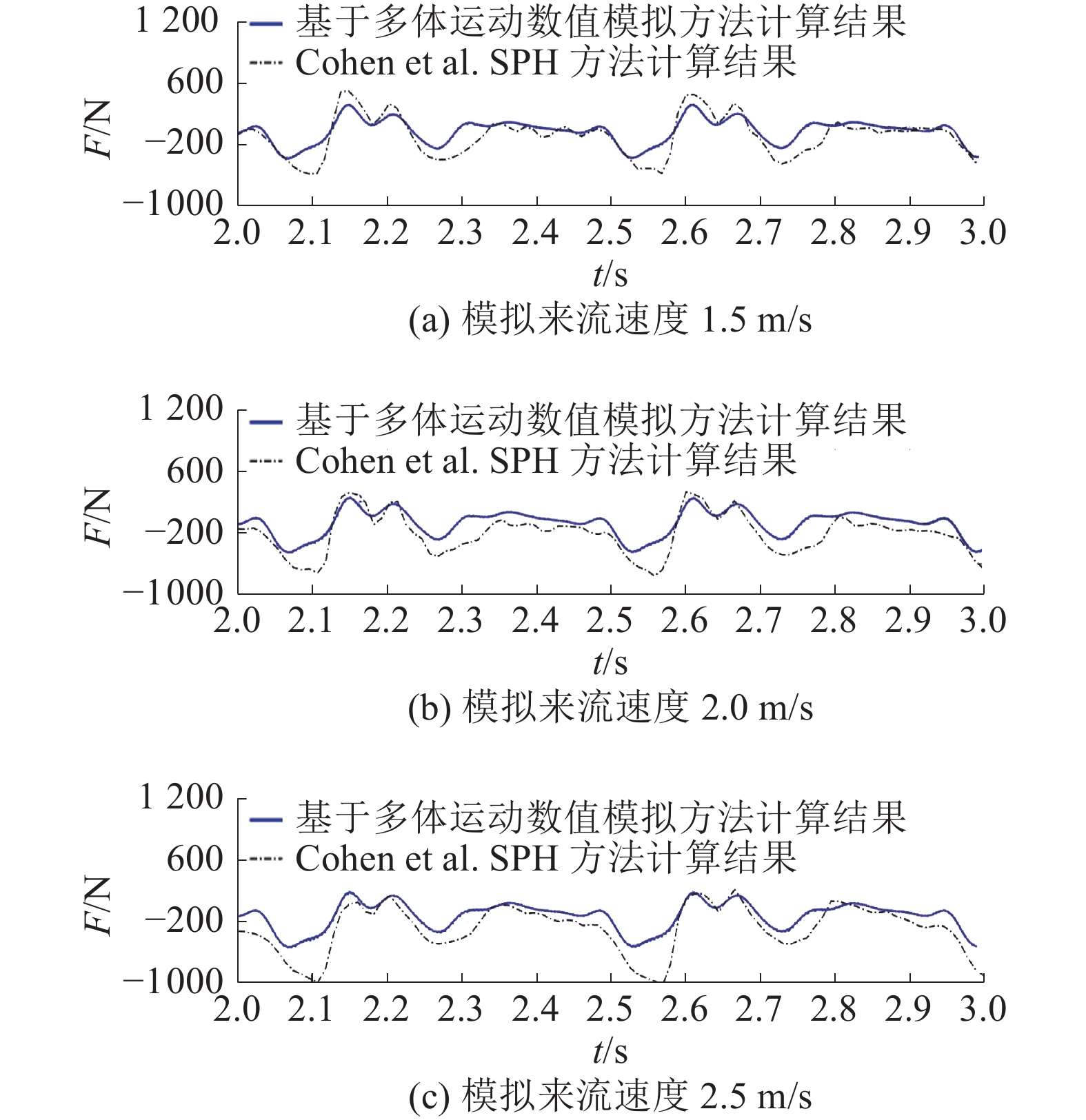
本研究参考前期的全尺度游泳运动员数值模拟的动网格网格无关性验证的结论对计算域进行划分[18]。文中选取Cohen等[14]的海豚泳研究数据作为参照,对本数值模拟方法的可行性进行验证,模拟来流速度分别设置为1.5、2.0和2.5 m/s。图3为运动员的运动方向净流向力的变化情况。从整体来看,在不同的工况中,2种方法的净流向力曲线变化趋势较为吻合。
另外,图4为1名国际水平运动员海豚泳视频进行动作分析,提取该名运动员的技术动作和稳定阶段的游动速度(约为1.79 m/s),并以此作为本方法验算的运动轨迹及速度边界条件。数值结果显示,以1.79 m/s游动时,获得的平均推进力为–1.71 N,接近满足匀速运动时,阻力和推进力为一对平衡力的要求,误差可能来自于处理后的多体模型与实际运动员模型的差异。
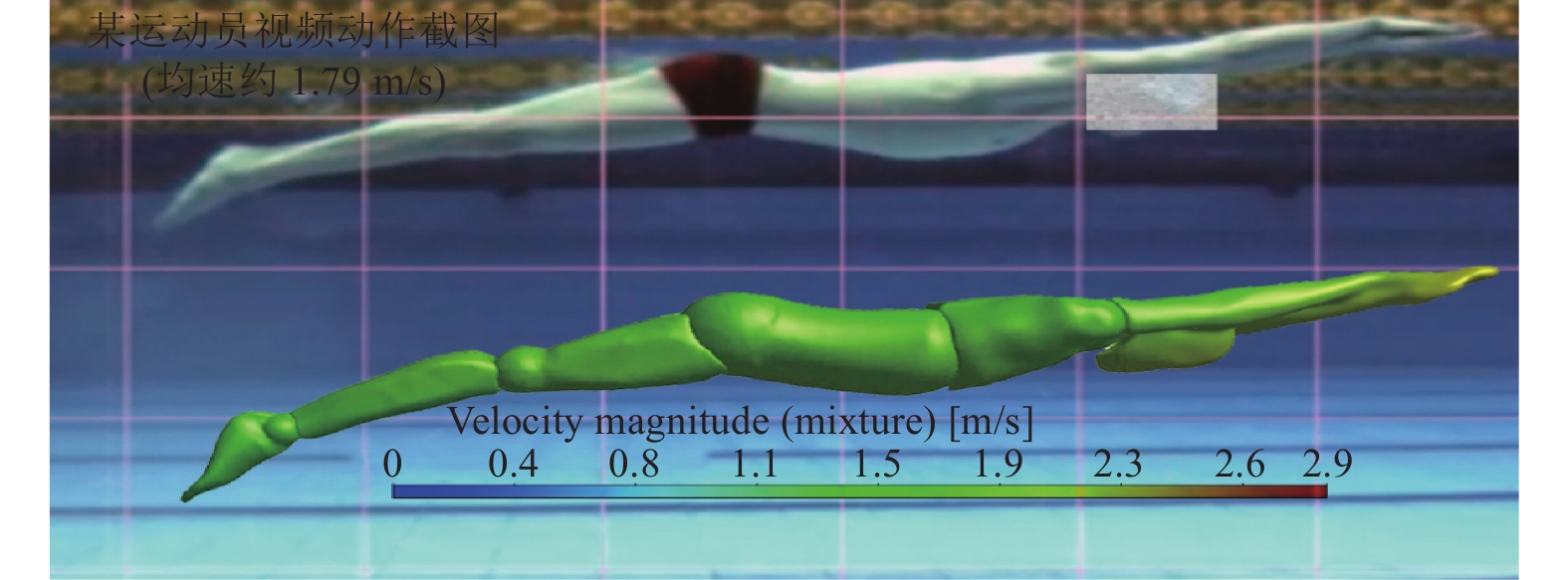 图 4 运动视频截图与数值模型动作下载:
全尺寸图片
图 4 运动视频截图与数值模型动作下载:
全尺寸图片
2.2 整体运动员水动力性能分析
在实际的游泳过程中,当运动员配速趋于匀速时,在完成单个完整运动周期内,推进力与阻力所做的功基本相等[19]。本研究中,当模拟游进速度1.4 m/s,满足以上条件。图5为运动员的游进速度为1.4 m/s的瞬时姿态与净流向力变化对应图。图5中的T为1个运动周期,为无量纲量。在运动周期初期,运动员下肢向上打腿,膝关节减速屈曲,角速度和动作速度逐渐减小,在接近0.48 T处抵达膝关节屈曲极限,此时净阻力达到最大值;随后,运动员开始向下伸展打腿,净阻力减小,推进力极速增大,在0.66 T处,推进力达到峰值,且推进力作用时段延续至0.85 T处;接下来,运动员继续向下伸展打腿,推进力减小,净阻力逐渐增大,并在0.93 T周期处达到第2大阻力峰值;最后,膝关节抵达最大伸展角度,返回到初始位置,完成1个周期打腿。由此可见,膝关节屈曲是游泳运动员阻力增加的主要原因,而向下打腿与向上打腿对产生推进力均有积极作用,其中向下打腿运动是最为重要推进力产生来源[20]。在早期的研究[21]中,学者们发现优秀的海豚泳运动员其膝关节的伸展程度通常大于普通水平的运动员。近期,Yamakawa等[22]的游泳数值模拟研究也表明运动员的游进速度与最大膝关节角度有较大相关性。因此,针对特定运动员开展膝关节伸展运动研究对于改进游泳性能有积极作用。
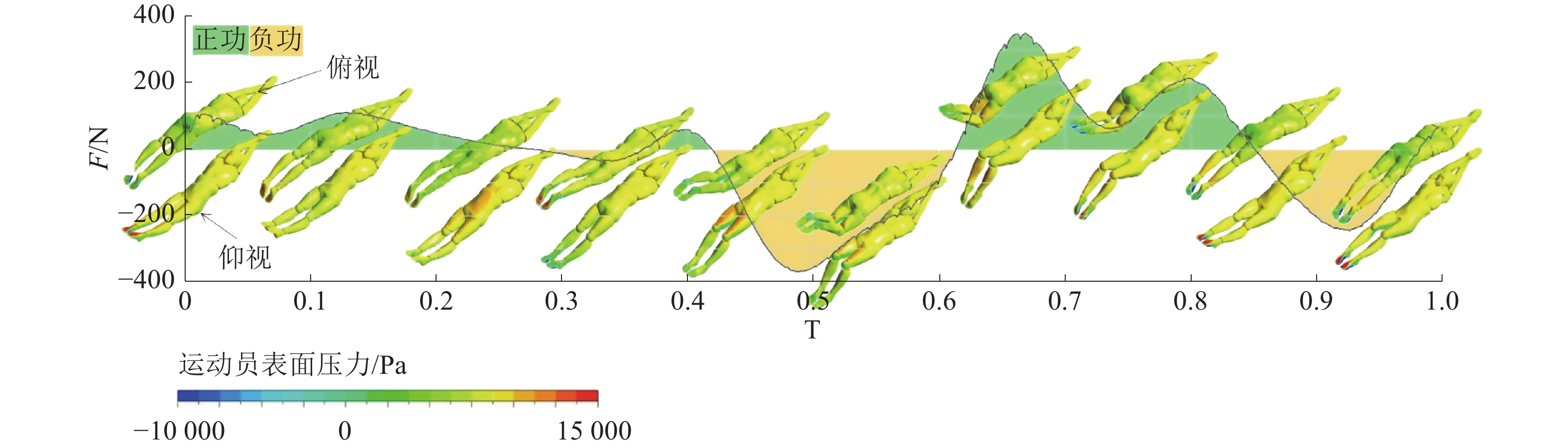 图 5 瞬时姿态与净流线力变化对应图下载:
全尺寸图片
图 5 瞬时姿态与净流线力变化对应图下载:
全尺寸图片
本环节参考文献[14]海豚泳动态游动数据,通过在来流入口设置速度函数模拟运动员变速游动。如图6所示,变速游动状态下,运动员的推进力与阻力的变化趋势和前面的匀速运动情况保持一致,但是变速运动时净流向力的波动幅度比前者更小,减速与加速对于力的峰值有明显的抑制效果,与参考文献[14]相符。尽管如此,在实际的海豚泳稳定游进过程中,运动员的速度波动是极为轻微的,Colman等[23]的海豚泳实验发现运动员采用海豚泳游进时其质心的速度非常恒定,我们在近期的海豚泳视频动作分析中也验证了这一观点。
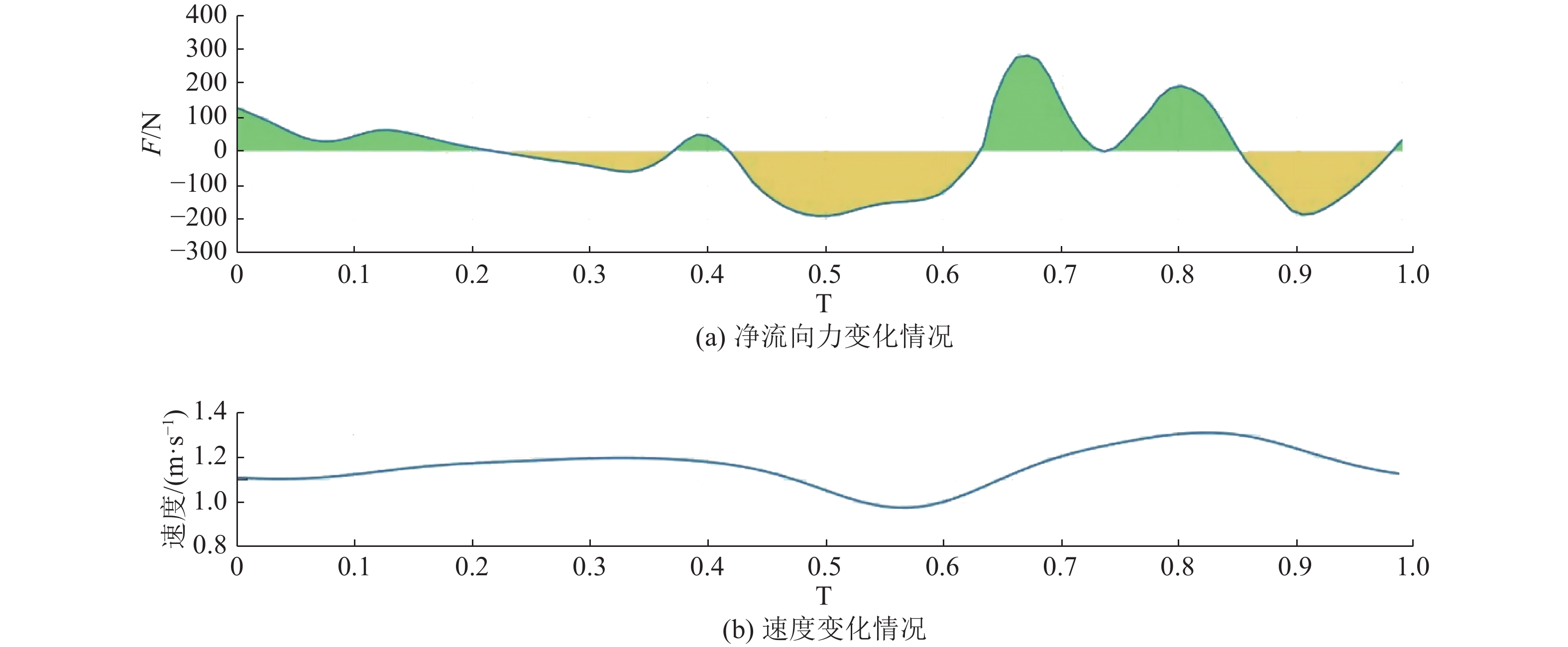 图 6 变速游动时净流向力变化情况下载:
全尺寸图片
图 6 变速游动时净流向力变化情况下载:
全尺寸图片
2.3 运动员各部位水动力性能分析
为进一步了解海豚泳的水动力特征,本研究对游动过程中运动员身体各部分产生的推进力和净阻力进行分析。图7为在1个完整的运动周期内,下肢体(脚掌、小腿、大腿)对海豚泳的游动性能起主导作用。其中,在向上打腿与向下打腿中,脚掌均为主要的推进力来源部位;另外,小腿和大腿的运动,是净阻力的主要来源,这可能是小腿、大腿在矢状面上做上下摆动动作,造成了运动员游进方向投影面积的增加,从而产生了较大的形状阻力。在0.48 T周期处小腿出现最大净阻力峰值,此时大腿及上半身几乎处于水平姿态,而小腿与水平方向成较大攻角,小腿背面直接承受来流作用,引起了较大的压差阻力;大腿出现最大峰值时刻在0.9 T处,其原因与前者相似。虽然,小腿与大腿贡献了大部分的阻力,但下肢发达的肌肉群(大腿、小腿)是支撑脚掌充分地与水相互作用产生强劲推进力的关键。另外,腰部对整体动态阻力的影响弱于脚掌、小腿与大腿,但值得留意的是,腰部上下摆动所做的正功要大于负功;除此之外,腰部作为连接上肢与下肢的重要桥梁,对维系流线型姿势具有重要积极的意义,腰背肌力量与海豚泳游泳性能高度相关[24],因此,增强腰背肌力量也应是质量训练中的重要一环。此外,虽然从计算结果看胸部及上肢运动产生的动态阻力较小,但其运动依然对海豚泳的表现起重要作用。其中,上胸椎可以抑制下肢的波动及保持手臂的小攻角从而减少阻力[25]。上肢做负功的区域出现在0.46~0.87 T处,该区间,上肢姿态刚好为向前下方倾斜,与游进方向形成一定的夹角,导致了净阻力的额外增加。由此可见,改善上肢运动对于提升海豚泳性能也具有积极意义。
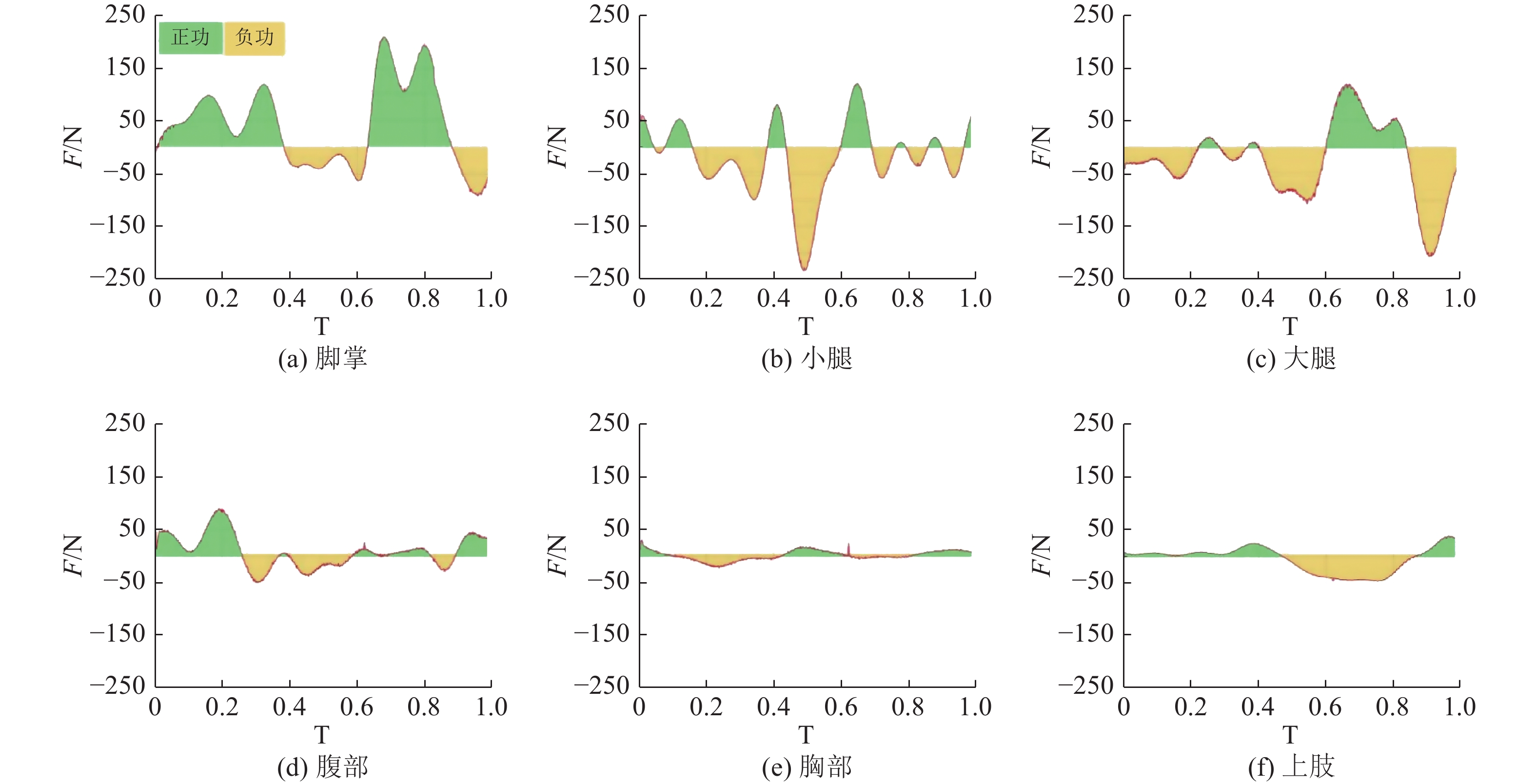 图 7 单个周期内运动员各部位动态阻力变化情况下载:
全尺寸图片
图 7 单个周期内运动员各部位动态阻力变化情况下载:
全尺寸图片
3. 结论
本研究采用基于CFD技术的游泳数值模拟方法能够较好地模拟分析复杂的动态游泳问题。在海豚泳中,推进力的产生与膝关节伸展运动密切相关;在向上打腿与向下打腿过程中,脚掌均为主要的推进力来源部位,小腿和大腿的运动是净阻力的主要来源,腰部上下摆动所做的正功要大于负功,所以增强腰背肌力量也应是质量训练中的重要一环。胸部及上肢运动产生的动态阻力较小,但上胸椎可以抑制下肢的波动及保持手臂的小攻角从而减少阻力,因此,改善上肢运动对于提升海豚泳性能也具有积极意义。本研究的结论可为指导游泳运动员入水和转身后海豚泳技术动作改进提供参考。
-
图 1 游泳运动员模型处理过程
下载:
全尺寸图片
图 2 海豚泳运动员的D-H模型
下载:
全尺寸图片
图 4 运动视频截图与数值模型动作
下载:
全尺寸图片
图 5 瞬时姿态与净流线力变化对应图
下载:
全尺寸图片
图 6 变速游动时净流向力变化情况
下载:
全尺寸图片
图 7 单个周期内运动员各部位动态阻力变化情况
下载:
全尺寸图片
-
[1] 马吉光. 游泳竞赛规则演变与游泳运动发展之关系[J]. 上海体育学院学报, 2012, 36(3): 87−90. doi: 10.3969/j.issn.1000-5498.2012.03.021 [2] YANG J, LI T, CHEN Z, et al. Hydrodynamic characteristics of different undulatory underwater swimming positions based on multi-Body motion numerical simulation method[J]. International journal of environmental research and public health, 2021, 18(22): 12263. doi: 10.3390/ijerph182212263 [3] 李天赠, 黄丹. 基于计算流体力学的游泳动态数值模拟研究进展[J]. 中国体育科技, 2019, 55(2): 19−28. [4] YUAN Z M, LI M, JI C Y, et al. Steady hydrodynamic interaction between human swimmers[J]. Journal of the royal society interface, 2019, 16(150): 20180768. doi: 10.1098/rsif.2018.0768 [5] 陈洁星, 温宇红, 沈思佳, 等. 游泳减阻与推进力技术优化研究进展[J]. 体育科学, 2021, 41(8): 79−86. [6] BIXLER B, SCHLODER M. Computational fluid dynamics: an analytical tool for the 21st century swimming scientist[J]. Journal of swimming research, 1996, 11(2): 4−22. [7] LYTTLE A, KEYS M J. The application of computational fluid dynamics for technique prescription in underwater kicking[C]// Biomechanics and Medicine in Swimming X. Portugal: N/A, 2006: 43-44. [8] VON Loebbecke A, MITTAL R, MARK R, et al. A computational method for analysis of underwater dolphin kick hydrodynamics in human swimming[J]. Sports biomechanics, 2009, 8(1): 60−77. doi: 10.1080/14763140802629982 [9] 左川, 李天赠, 孙杨, 等. 基于多体运动数值模拟方法研究髋关节屈曲角度对水下海豚泳打腿的影响[J]. 医用生物力学, 2021, 36(4): 510−518. [10] PACHOLAK S, HOCHSTEIN S, RUDERT A, et al. Unsteady flow phenomena in human undulatory swimming: a numerical approach[J]. Sports biomech, 2014, 13(2): 176−194. doi: 10.1080/14763141.2014.893609 [11] CHEN Z, LI T, YANG J, et al. The effect of the swimmer’s trunk oscillation on dolphin kick performance using a computational method with multi-body motion: a case study[J]. International journal of environmental research and public health, 2022, 19(9): 4969. doi: 10.3390/ijerph19094969 [12] MITTAL R, DONG H, BOZKURTTAS M, et al. Analysis of flying and swimming in nature using an immersed boundary method[C]//36th AIAA Fluid Dynamics Conference and Exhibit. California: AIAA, 2006: 2867. [13] VON Loebbecke A, MITTAL R, FISH F, et al. A comparison of the kinematics of the dolphin kick in humans and cetaceans[J]. Human movement science, 2009, 28(1): 99−112. doi: 10.1016/j.humov.2008.07.005 [14] COHEN R C Z, CLEARY P W, MASON B R. Simulations of dolphin kick swimming using smoothed particle hydrodynamics[J]. Human movement science, 2012, 31(3): 604−619. doi: 10.1016/j.humov.2011.06.008 [15] COHEN R C Z, CLEARY P W, MASON B R, et al. Studying the effects of asymmetry on freestyle swimming using smoothed particle hydrodynamics[J]. Computer methods in biomechanics and biomedical engineering, 2020, 23(7): 271−284. doi: 10.1080/10255842.2020.1718663 [16] NAKASHIMA M. Simulation analysis of the effect of trunk undulation on swimming performance in underwater dolphin kick of human[J]. Journal of biomechanical science and engineering, 2009, 4(1): 94−104. doi: 10.1299/jbse.4.94 [17] DING F, LIU C. Applying coordinate fixed Denavit–Hartenberg method to solve the workspace of drilling robot arm[J]. International journal of advanced robotic systems, 2018, 15(4): 1−8. [18] LI T, CAI W, ZHAN J. Numerical investigation of swimmer’s gliding stage with 6-DOF movement[J]. PloS one, 2017, 12(1): e0170894. doi: 10.1371/journal.pone.0170894 [19] 杨进, 李天赠, 陈志涯, 等. 基于刚体运动的蝶泳打腿动作水动力特性研究[J]. 水动力学研究与进展(A辑), 2021, 36(5): 603−612. [20] ALVES F, MARINHO D, LEAL L, et al. 3-D computational fluid dynamics of the hand and forearm in swimming[J]. Medicine & science in sports & exercise, 2007, 39(5): S9. [21] UNGERECHTS B E. A comparison of the movements of the rear parts of dolphins and butterfly swimmers[C]// In Fourth International Symposium of Biomechanics and Fifth International Symposium on Swimming Medicine. Amsterdam: Human Kinetics, 1983: 215-221. [22] YAMAKAWA M, MIZUNO N, ASAO S, et al. Optimization of knee joint maximum angle on dolphin kick[J]. Physics of fluids, 2020, 32(6): 067105. doi: 10.1063/1.5142422 [23] COLMAN V, PERSYN U, UNGERECHTS B. A mass of water added to the swimmer's mass to estimate the velocity in dolphin-like swimming below the water surface[C]//VIII International Symposium-Biomechanics and Medicine in Swimming. Jyväskylä: N/A, 1998: 49. [24] 林洪, 李征艳, 应春意, 等. 我国优秀女子混合泳运动员叶诗文的转身技术分析[J]. 中国体育科技, 2015, 51(6): 83−89. doi: 10.16470/j.csst.201506011 [25] ATKISON R R, DICKEY J P, DRAGUNAS A, et al. Importance of sagittal kick symmetry for underwater dolphin kick performance[J]. Human movement science, 2014, 33: 298−311. doi: 10.1016/j.humov.2013.08.013