

DOI: 10.11991/yykj.201604013

 ,
,
,
,
,
,
,
,
,
,
,
,
随着水下资源需求的不断扩大,各种浮式结构物在海洋中的运动日益受到重视,其中动力定位系统在该领域中的应用也得到广泛关注。船舶动力定位系统是指利用自身推力装置来抵抗外界海洋环境扰动,以保证船舶在某固定位置或沿预定航迹航行的系统。在此过程中需要利用传感器测量出船舶的实际位置和艏向角,从而计算得到控制系统的控制输入。而对于水面平台的三自由度运动来说,来自测量系统的位姿信号值对定位精度影响较大,所以有必要剔除测量信息中因传感器产生的测量噪声。再考虑一阶波浪所造成的船舶高频振荡运动,它只会增加推进器的磨损以及能源消耗,因此没有必要对其进行控制处理,故在位置估计中应将高频分量去除,从而实现对低频运动的精确控制。滤波器就是将传感器信息中的噪声处理掉,然后尽可能准确地估计出船舶位姿和艏向信息,以便对船舶运动进行有效控制。综上,滤波估计器的设计对船舶动力定位系统控制器的设计至关重要。
最初的动力定位系统采用串联低通或陷波滤波器抑制波生动态,但会使定位误差信号产生相位滞后,不利于系统的稳定性。随后Balchen[1-2]和SØrensen[3]将线性最优控制和卡尔曼滤波理论引入到动力定位系统中,但卡尔曼滤波对估计误差只具有局部收敛性。于是考虑实际系统的非线性特性,Fossen等[4]又提出无源非线性滤波的概念,并利用李亚普诺夫方法证明了它的全局稳定性。近年来国内对船舶动力定位系统滤波方法的研究热潮也逐渐增多,何黎明[5]采用一种增广式滤波方法将动态估计误差分成了高频信号和低频信号两部分,丁福光[6]和彭秀艳等[7]利用无源非线性滤波方法来实现船舶位姿预测和输出反馈控制,孙晓娜[8]基于Sage-Husa滤波算法和强跟踪卡尔曼滤波算法设计了一种自适应滤波算法。以上各滤波方法对环境扰动的处理均是以整体力的形式体现在船舶模型中,可参见文献[9]。而文中对海流的处理以低频模型中的相对速度来实现,对海风的处理则通过将风速与风向转化为力与力矩来实现。基于文献[10],利用一种非线性滤波器来实现高、低频模型和环境模型的滤波和状态估计,并利用风速和风向的估计误差来设计风滤波器,因为风速和风向可通过风速计测量得到。最后通过数值仿真来验证各部分滤波器的有效性和滤波性能。
1 船舶数学模型的建立动力定位系统的主要任务是完成几何空间纵向、横向和艏向3个沿轴或绕轴运动的控制,而定位作业船只需控制水平面内受到风、浪、流干扰的纵荡、横荡和艏摇运动即可。为得到船舶的相关动态特性,应准确构建出各部分数学模型,分别建立船舶的高、低频模型,海洋环境模型和测量模型[6]。在各个模型的基础上实现状态滤波估计,从而完成对整个系统的低频运动控制。
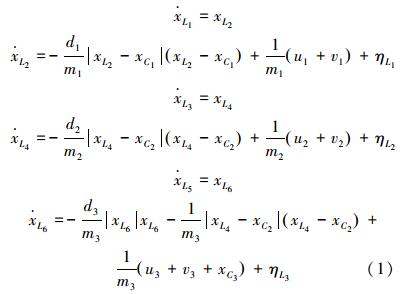
1.1 低频模型基于船体平行坐标系和地球固定坐标系,建立仅受风浪流和推力系统影响的船舶低频运动数学模型。同时考虑纵向、横向和艏摇方向上的系统噪声影响,可得低频模型表达式为[11]
 |
(1) |
式中:xLi(i=1, 3, 5) 分别表示纵向、横向位置和艏摇角度值;xLi(i=2, 4, 6) 分别表示对应方向上的速度和角速度值;xCi分别表示纵向、横向流速以及艏向流力矩;ui与vi分别表示对应方向上的风力和推力;di表示阻力和力矩系数;ηLi表示零均值高斯白噪声;mi为惯性系数。
1.2 高频模型动力定位船舶的高频运动,主要是由一阶波浪力引起的,可认为纵荡、横荡和艏摇3个自由度上是没有耦合的,所以每个自由度均可视为独立的子系统,且结构类似[12]。同样得高频模型表达式为
 |
(2) |
式中:xHi(i=1, 3, 5) 分别是船舶高频纵荡、横荡位置和艏摇角度;xHi(i=2, 4, 6) 分别表示对应方向上的高频速度和角速度分量;ωi(i=1, 2, 3) 分别表示对应方向上的角频率;ηHi表示零均值高斯白噪声。
1.3 环境扰动模型文中重点研究环境扰动风和流对船舶的影响,且均以速度和方向的变量给出,而不是直接以力与力矩的作用形式来体现。
海流速度向量是缓慢变化的参数,且假设艏向流力矩也是缓慢变化的,则可得如下海流模型[13]:

式中ηCi(i=1, 2, 3) 为零均值高斯白噪声。纵荡和横荡方向上海流对船舶的影响主要体现在相对速度上,而艏摇方向上以流力矩的形式来体现。
风速和风向的给定分为缓慢变化的均值部分和快速变化的阵风部分,设xw1与xw3分别表示慢变风速与风向,xw2与xw4分别表示阵风风速与风向。
可建立风模型为
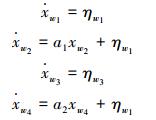
式中ai为模型常量系数。
基于上述风速与风向模型,定义作用于低频船模中的风力和力矩表达式为

式中fi(·) 为风阻力与力矩系数,是关于风向和船舶艏向间夹角β的函数。
1.4 测量模型
船舶位置和艏向信息可通过不同类型的传感器测量得到,且测量值中一般带有噪声扰动信号,因此系统的测量模型[14]:
 |
(7) |
yi(i=1, 2, 3) 分别表示纵向、横向和艏向测量值;wi为测量高斯白噪声。
由于风速和风向也可通过船上的风速计测量得到,因此建立风速与风向的测量模型为

式中ywi分别表示风速和风向测量值;wwi(i=1, 2) 为风模型测量高斯白噪声。
2 非线性估计滤波器的数学描述基于前面所建立的船舶系统模型和测量模型,完成非线性滤波器的设计。为简化分析,考虑以下几点假设:
1) 风状态的估计和船舶运动变量的估计之间是没有耦合的,即风状态的估计更新利用的是风测量值,而不是船舶位姿测量值;
2) 风速与风向间的估计是解耦的;
3) 纵荡、横荡和艏摇滤波器之间是解耦的[15];
4) 各滤波器的增益矩阵是常值。
系统滤波器结构如图 1所示。

|
| 图 1 系统滤波器结构 |
图中的KW、K、KC为各模块滤波器增益矩阵;εS和εD分别表示风速、风向估计误差;ε表示船舶位姿估计误差。下面将对每部分子系统分别进行考虑。
2.1 纵荡滤波器以纵荡为例对船舶高低频位置和速度进行滤波估计,横荡和艏摇方向上所采用的滤波方法与纵荡类似。
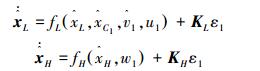
式中:



由于流速与流向不可测,所以海流滤波器的设计需利用船舶位置和艏向角的估计误差:

式中:





由于风速风向可通过传感器测量得到,且其噪声扰动是互不影响的,因此风速与风向估计相互解耦且类似,以风速估计为例:
式中:

为更好地表现上述非线性滤波器的估计性能,还需考虑常用的卡尔曼滤波器以实现对比分析。
卡尔曼滤波是以最小均方误差为准则的状态递推估计算法,主要基于信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的实际值来更新对状态变量的估计[16]。它的优点在于能实时处理数据以及计算机运算,但需准确地预知测量噪声和系统噪声的统计特性才能很好地实现状态滤波,而实际情况中并不能很好地获得噪声信息。
一般滤波算法中,将风、浪、流对船舶的影响当作总的环境力b∈R3进行描述,即
 |
(3) |
因此将系统模型整理为如下形式:
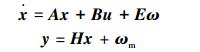
式中:x为高、低频船舶位姿和环境力的矢量;u为低频分量;y为实际测量值;ω和ωm分别为系统噪声和测量噪声矢量,其余均为对式 (1)~(3) 变换后的系数矩阵。
设采样时间为h,卡尔曼滤波器的算法为
3 数值仿真分析 3.1 仿真对象参数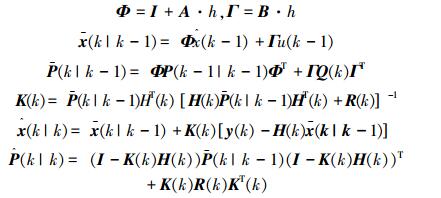
以某动力定位船的相关参数为仿真对象进行数值模拟,其中船长80.8 m,型宽17.9 m,吃水6.9 m,排水量为5 533 t,受风横向投影面积为330.90 m2,侧向投影面积为874.8 m2。其余主要参数为m1=6 523 040,m2=9 377 845,m3=2 173 485 823,d1=5.0×105,d2=2.2×106,d3=7.6×108,d4=4.1×106。
船舶高频模型中的角频率为ωi=0.5 rad/s;风速与风向模型中的时间常数设为ai=-0.01。
3.2 仿真结果分析 3.2.1 非线性滤波器状态估计基于上述系统模型和非线性滤波器理论,调节各部分滤波器增益矩阵为:

可先对风滤波器增益进行调节,再调节流滤波增益,最后调节纵荡高频、低频滤波器参数。因为风力与风力矩对模型的影响体现在环境外力上,而流速直接体现在相对船速中,对船舶位姿变量的影响更大。

|
| 图 2 慢变风速和阵风风速 |

|
| 图 3 慢变风向和阵风风向 |

|
| 图 4 纵向、横向流速和艏向流力矩 |

|
| 图 5 纵向高频位置实际值和估计值 |

|
| 图 6 纵向低频位置实际值和估计值 |

|
| 图 7 纵向速度实际值和估计值 |
图 2、3是环境扰动风的状态估计响应结果,其中实线表示的是风速和风向的实际值,虚线表示的是风速和风向的估计值。从图中可以看出无论是缓慢变化的平均风还是快速变化的阵风,风滤波器都能很好地跟踪上各个状态变量的实际值。但初始估计阶段误差较大,这是由于估计初值与实际初值偏差较大而引起的,若估计初值的给定越接近实际初值则跟踪调节时间就越短,跟踪性能就越好。图 4为纵向横向流速与艏向流力矩的变量估计结果,整体状态估计效果良好,但与风滤波器相比,估计误差较大。因为风速与风向可通过传感器测量,因此风滤波器的设计是基于风速与风向的测量估计误差,而海流速度是不可测的,对海流滤波器的设计是基于船舶位置和艏向的估计误差,后者的估计误差主要与船舶低频状态和高频状态相关,而流速与流力矩的影响体现在低频船模中,所以海流的影响是间接的,这使得海流滤波器的增益也变得较难调节。图 5~7分别是船舶纵向上高频、低频位置与速度的滤波估计,横荡与艏摇方向上估计效果类似。由图可见该纵荡滤波器能够很好地从含有过程噪声以及测量噪声的输出中估计出纵荡位置及速度。总的来说,各部分滤波器均能很好地实现对系统位姿、速度和海洋环境扰动的滤波估计。
3.2.2 对比分析为便于更好地体现所设计的非线性滤波器的性能,以卡尔曼滤波器为例进行对比分析,并从估计误差方面来观察两者的滤波估计性能。
其中卡尔曼滤波算法中的Q、R分别对应的是系统噪声ω和测量噪声ωm的正定协方差矩阵,表示噪声统计特性量。

|
| 图 8 纵荡、横荡和艏向上滤波器估计误差 |

|
| 图 9 纵荡估计误差 |
为便于观察分析,以纵荡为例,将图 8中纵荡方向的估计误差单独取出,即图 9,可得纵荡方向上的估计误差统计结果如表 1所示。
从表 1可以看出,由非线性滤波器所得到的估计状态统计特性均比卡尔曼滤波器所得到的效果要好,因此,文中所设计的滤波器具有良好的滤波估计性能。这是由于对风速与风向的估计是基于实际风变量的测量误差,因此单独考虑风速与流速的估计要比直接考虑总的环境力能实现更好的跟踪,从而对动力定位船位姿状态信息的估计也就更精确。
4 结束语
文中基于一种非线性滤波方法对船舶动力定位系统各相关变量实现了滤波估计,且针对不同模块分别设计相对独立的状态观测器,尤其是对海洋环境风和流单独进行了估计滤波器的研究,从而使得作用于船舶上的扰动估计更加合理精确。通过仿真分析结果可以看出各部分滤波器均能很好地实现状态估计性能,但对海流滤波器的设计应进行更加深入探究,使其滤波增益与误差联系更为紧密。
| [1] | BALCHEN J G, JENSSEN N A, SÆLID S. Dynamic positioning using kalman filtering and optimal control theory[C]//Proceedings of IFAC/IFIP Symposium on Automation in Offshore Oil Field Operation. Bergen, Norway, 1976: 183-186. |
| [2] | SÆLID S, JENSEN N A, BALCHEN J G. Design and analysis of a dynamic positioning system based on Kalman filtering and optimal control[J]. IEEE transactions on automatic control, 1983, 28(3): 331-339 DOI:10.1109/TAC.1983.1103225 |
| [3] | SØRENSEN A J, SAGATUN S I, FOSSEN T I. Design of a dynamic positioning system using model-based control[J]. Control engineering practice, 1996, 4(3): 359-368 DOI:10.1016/0967-0661(96)00013-5 |
| [4] | FOSSEN T I, STRAND J P. Passive nonlinear observer design for ships using Lyapunov methods: full-scale experiments with a supply vessel[J]. Automatic, 1999, 35(1): 3-16 DOI:10.1016/S0005-1098(98)00121-6 |
| [5] | 何黎明, 田作华, 施颂椒. 船舶动力定位系统的一增广非线性观测器设计[J]. 船舶工程, 2003, 25(4): 47-49 |
| [6] | 丁福光, 彭劲锋, 王元慧. 非线性滤波器在动力定位船位估计中的应用[J]. 中国造船, 2011, 52(3): 67-73 |
| [7] | 彭秀艳, 胡钟辉. 带有海浪滤波器的船舶航向反步自适应输出反馈控制[J]. 控制理论与应用, 2013, 30(7): 863-868 |
| [8] | 孙晓娜, 张闯. 船舶动力定位系统滤波器设计及仿真[J]. 船舶, 2015(3): 26-27 |
| [9] | SØRENSENA J. Marine Control System[Z]. Department of Marine Technology Norwegian University of Science and Technology, 2012: 239-258. |
| [10] | BALCHEN J G, JENSSEN N A, MATHISEN E, et al. A dynamic positioning system based on Kalman filtering and optimal control[J]. Modeling, identification and control: A Norwegian research bulletin, 1980, 1(3): 135-163 DOI:10.4173/mic.1980.3.1 |
| [11] | STRAND J P. Nonlinear position control systems design for marine vessels[D]. Trondheim Norway: Norwegian University of Science and Technology, 1999. |
| [12] | DING Fuguang, TAN Jinfeng, WANG Yuanhui. Research on the position estimation of dynamic positioned ship using nonlinear filter[J]. Shipbuilding of China, 2011, 52(3): 67-73 |
| [13] | 李文华, 宋健, 杜佳璐, 等. 船舶动力定位海洋环境风力扰动仿真[J]. 计算机仿真, 2012, 29(11): 154-157 DOI:10.3969/j.issn.1006-9348.2012.11.036 |
| [14] | 王宗义, 肖坤, 庞永杰, 等. 船舶动力定位的数学模型和滤波方法[J]. 哈尔滨工程大学学报, 2002, 23(4): 24-28 |
| [15] | NORRBIN N H. Theory and observations on the use of a mathematical model for ship manoeuvring in deep and confined waters[C]//Proceedings of the 8th Symposium on Naval Hydrodynamics. Pasadena, California, 1970. |
| [16] | PEREZ T, FOSSEN T I. Kinematic models for manoeuvring and seakeeping of marine vessels[J]. Modeling, identification and control, 2007, 28(1): 19-30 DOI:10.4173/mic.2007.1.3 |