
Research on collaborative self-organizing surrounding control algorithm of USV swarm
-
摘要: 无人艇(unmanned surface vessel, USV)集群协同围捕是无人艇的重要应用场景之一,文章针对无人艇集群协同围捕任务设计了一种自组织控制算法。考虑到被围对象的加速度未知且仅部分集群成员可对其测量的情况,文章设计了分布式目标状态观测器(distributed target state observer, DTSO),实现围捕过程中各成员对被捕对象状态的一致性观测。设计了一种自组织围捕引导律,解决了围捕算法需要为成员预分配期望位置的问题。设计了分布式非线性模型预测控制(distributed nonlinear model predictive control, DNMPC),解决了执行器饱和与艇间距离约束的问题,实现了满足避碰安全的协同围捕控制。文章分析了控制系统的输入−状态稳定性(input-to-state stability, ISS),并通过多组不同初始状态和改变成员数量的仿真实验,验证了围捕算法的有效性。Abstract: Unmanned surface vehicle (USV) swarm cooperative surrounding is one of the important application scenarios of USVs. This paper designs a self-organizing control algorithm for USV swarm cooperative surrounding tasks. Considering the unknown acceleration of the target to be encircled and the fact that only some members of the swarm can measure its position and velocity, this paper proposes a distributed target state observer (DTSO) to achieve consistency observation of the target state among swarm members during the surrounding process. Subsequently, a self-organizing surrounding guidance law is designed to address the issue of pre-allocating expected positions for members in the surrounding algorithm. Finally, a distributed nonlinear model predictive control (DNMPC) is designed to resolve the problems of actuator saturation and inter-boat distance constraints, achieving collaborative surrounding control that meets collision avoidance safety. The paper analyzes the input-to-state stability (ISS) of the control system and validates the effectiveness of the surrounding algorithm through simulation experiments with multiple sets of different initial states and varying numbers of members.
-
近年来,随着海洋开发及人工智能技术的不断发展,无人艇(unmanned surface vessel, USV)的相关技术研究逐渐成为船舶与海洋工程领域研究热点[1-3]。无人艇泛指具备机动性的、可根据适用场景搭载多种设备的自主或半自主水面运载器[4],因其具备着成本低、机动性强、安全性高、可模块化部署等优势[5],被广泛地应用于水下探测、水文测量、猎扫雷、海上巡逻以及作战等多种民用或军事任务。然而,单无人艇作业常受限于探测与载荷的能力,提高工作效率与任务覆盖需要成规模的无人艇集群[6]。21世纪初,大量学者深入研究多智能体系统协同控制技术[7-9],有关集群队形保持、协同搜索、目标围捕等研究逐渐增多[10-13]。
集群协同围捕技术旨在将被围对象限制于集群成员形成的包围圈(凸包)中,在军事领域具有重要意义[14]。无人飞机与地面机器人集群等领域有许多关于协同围捕的工作[15-17]。在无人艇集群领域,文献[18]设计了一种基于虚拟点导引的围捕引导律算法,通过扩展卡尔曼滤波器预估被围对象位置,并更新各成员船的预期包围半径与相位,但文章中稳定性分析不足,且各成员船序号与算法参数受初始状态影响较大。文献[19]讨论了Apollonius包围圆理论下的围捕速度条件,设计运动学意义下基于势场的集群控制算法,并在仿真测试中考虑了被围对象的逃避策略,但文章设计的控制算法需要全局信息,且未引入无人艇动力学模型,实用性有待验证。文献[20]设计了无人艇集群均匀相位围捕控制算法,并考虑了集群通信拓扑与未知的目标移动速度。但文章假定被围对象做未知匀速运动,设计的算法并未考虑成员间的避碰问题,且需要预分配成员相对于被围对象的位置,在集群成员数目动态变化时难以实现自组织能力。文献[21]基于深度强化学习方法设计了一种分布式协同围捕策略网络,提出了一种集中训练−分布执行的围捕训练架构,并考虑了逃避策略与人工训练指导。但策略网络结构与传感器数据耦合性较强,且黑盒特性使得系统稳定性难以分析。总之,分布式与自组织的研究是目前无人艇集群协同围捕技术的重点内容,传统控制理论与新兴智能技术在该领域齐头并进。
本文设计了一种无人艇集群自组织围捕控制算法,与以往研究的局限性不同,本算法主要包含3个创新点:1) 提出了一种稀疏通信下的分布式协同围捕算法,解决了围捕过程需要预分配成员期望位置的问题,实现了适应成员数量改变的自组织围捕;2) 设计了分布式目标状态观测器,解决了仅有部分成员对目标测量的问题,实现对变速移动目标的观测一致性;3) 设计了基于船舶动力学模型的分布式预测控制器,解决了执行器饱和与安全距离的约束问题,实现了满足避碰安全的协同围捕控制。
1. 问题描述
设向量
${\boldsymbol{x}},{\boldsymbol{y}} \in {\mathbb{R}^n}$ ,定义以下运算:矩阵的Kronecker乘积算子$ \otimes $ ,$ \left|\boldsymbol{x}\right|^{\alpha} = \left[\left|x_{\text{1}}\right|^{\alpha}\ \left|x_{\text{2}}\right|^{\alpha} \ \cdots\ \left|x_n\right|^{\alpha}\right]^{\text{T}} $ ,$ \boldsymbol{x}\circ\boldsymbol{y} = \left[x_{\text{1}}y_{\text{1}}\ x_{\text{2}}y_{\text{2}}\ \cdots\ x_ny_n\right]^{\text{T}} $ ,${\text{si}}{{\text{g}}^\alpha }({\boldsymbol{x}}) = {\left| {\boldsymbol{x}} \right|^\alpha } \circ {\text{sign}}({\boldsymbol{x}})$ ,其中$ \text{sign}(\boldsymbol{x})= \left[\text{sign}(x_{\text{1}})\ \cdots\ \text{sign}(x_n)\right]^{\text{T}} $ 。定义矩阵${{\boldsymbol{I}}_k}$ 为$k$ 维单位矩阵。1.1 欠驱动USV三自由度运动学及动力学模型
本文考虑具备差分推进器结构的欠驱动无人艇集群,忽略船体结构的前后不对称性及高阶阻尼项,其运动学及动力学模型为[22-23]
$$ \left\{ \begin{gathered} {\boldsymbol{\dot \eta }} = {\boldsymbol{R}}(\psi ){\boldsymbol{\xi }} \\ {\boldsymbol{\dot \xi }} = {\boldsymbol{F}}({\boldsymbol{\xi }},{\boldsymbol{\tau }},{{\boldsymbol{\omega }}_{\text{b}}}) \\ \end{gathered} \right. $$ (1) 式中:
$ \boldsymbol{\eta}=\left[x\ y\ \psi\right]^{\text{T}} $ 表示地表切面直角坐标系下的船舶位置和艏向角,$ {\boldsymbol{R}}( \cdot ) $ 为旋转变换矩阵,$ \boldsymbol{\xi}=\left[u\ v\ r\right]^{\text{T}} $ 为船体坐标系下的速度和角速度,$ \boldsymbol{\tau}=[\tau_{\text{p}}\ \tau_{\text{s}}]^{\text{T}} $ 分别为左、右推进器转速。由风浪流引起的未知海洋环境干扰力及力矩在两坐标系分别表示为$ {{\boldsymbol{\omega }}_{\text{b}}},{\text{ }}{{\boldsymbol{\omega }}_{\text{g}}} \in {\mathbb{R}^3} $ ,并有$ {{\boldsymbol{\omega }}_{\text{b}}} = {{\boldsymbol{R}}^{\text{T}}}(\psi ){{\boldsymbol{\omega }}_{\text{g}}} $ 。对其展开:$$ \left\{ \begin{gathered} \dot x = u\cos \psi - v\sin \psi \\ \dot y = u\sin \psi + v\cos \psi \\ \dot \psi = r \\ \dot u = - \frac{{{d_u}}}{{{m_{{\text{11}}}}}}u + \frac{{{m_{22}}}}{{{m_{{\text{11}}}}}}vr + \frac{{{k_u}({\tau _{\text{p}}} + {\tau _{\text{s}}})}}{{{m_{{\text{11}}}}}} + \frac{{{\omega _{{\text{b1}}}}}}{{{m_{{\text{11}}}}}} \\ \dot v = - \frac{{{d_v}}}{{{m_{{\text{22}}}}}}v + \frac{{{m_{{\text{11}}}}}}{{{m_{{\text{22}}}}}}ur + \frac{{{\omega _{{\text{b2}}}}}}{{{m_{{\text{22}}}}}} \\ \dot r = - \frac{{{d_r}}}{{{m_{{\text{33}}}}}}r + \frac{{{m_{{\text{11}}}} - {m_{{\text{22}}}}}}{{{m_{{\text{33}}}}}}vr + \frac{{{k_r}({\tau _{\text{p}}} - {\tau _{\text{s}}})}}{{{m_{{\text{33}}}}}} + \frac{{{\omega _{{\text{b3}}}}}}{{{m_{{\text{33}}}}}} \\ \end{gathered} \right. $$ (2) 式中:
${m_{ii}}$ ,$i = 1,2,3$ 为船体质量与惯量参数;${d_i}$ ,$i = u,v,r$ 为阻尼项系数;${\omega _{{\text{b}}i}}$ ,$ i = 1,2,3$ 为环境干扰力及力矩;${k_u}$ 和$ {k_r} $ 分别为推力与扭矩系数。假设1 海洋环境干扰
$ {{\boldsymbol{\omega }}_{\text{g}}} $ 满足变化缓慢、能量有界的特点,即$ {{\boldsymbol{\dot \omega }}_{\text{g}}} \approx {\boldsymbol{0}} $ 且$\left\| {{{\boldsymbol{\omega }}_{\text{g}}}} \right\| \leqslant {\omega _{{\text{max}}}}$ 。假设2 推进器转速存在上限,即
$ \left| {{\tau _{{\text{p,s}}}}} \right| \leqslant {\tau _{\max }} $ 。1.2 协同围捕任务
令
${S_{\text{0}}}$ 为被围对象,${S_i}$ 表示集群中成员节点,则总数为$n$ 的USV集群表示为${S^n} = \left\{ {{S_i}|i = 1,2, \cdots ,n} \right\}$ 。设${C_h}({\boldsymbol{\varsigma }})$ 为USV集群${S^n}(n \geqslant 3)$ 中成员构成的凸包:$ {C}_{h}({\boldsymbol{\varsigma }} )=\left\{{\displaystyle \sum _{i=1}^{n}{a}_{i}{{\boldsymbol{\varsigma }} }_{i}}|{a}_{i} \geqslant 0且{\displaystyle \sum _{i=1}^{n}{a}_{i}=1}\right\} $ 。其中平面位置向量表示为:$ \boldsymbol{\varsigma}=\left[\boldsymbol{\varsigma}_{\text{1}}^{\text{T}}\ \boldsymbol{\varsigma}_{\text{2}}^{\text{T}}\ \cdots\ \boldsymbol{\varsigma}_n^{\text{T}}\right]^{\text{T}} $ ,$ \boldsymbol{\varsigma}_i=[x_i\ \ y_i]^{\text{T}} $ 。协同围捕任务是指将目标围困在集群成员构成的凸包之内,图1所示为$n = 3$ 时将目标围于凸包内的过程。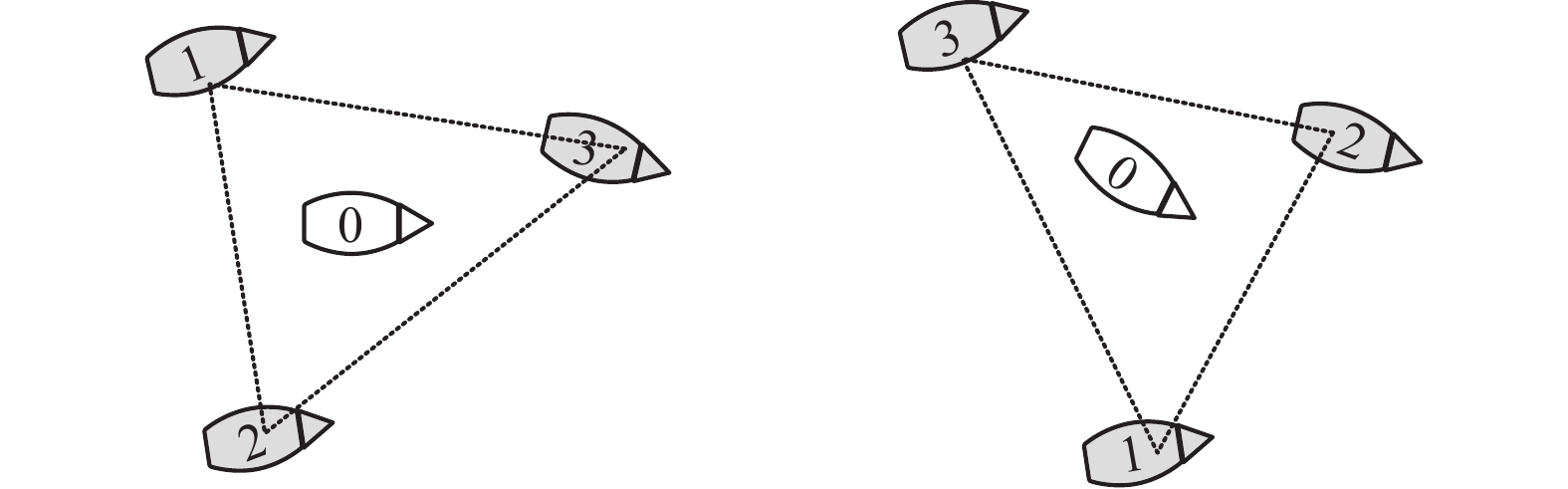 图 1 将目标围于凸包内Fig. 1 Surround the target within a convex hull
图 1 将目标围于凸包内Fig. 1 Surround the target within a convex hull 下载:
全尺寸图片
下载:
全尺寸图片
定义1 令
${P_{{{\boldsymbol{\varsigma }}_0}}}({\boldsymbol{\varsigma }}) = \mathop {\min }\limits_{{\boldsymbol{\varsigma '}} \in {C_h}({\boldsymbol{\varsigma }})} \left\| {{\boldsymbol{\varsigma '}} - {{\boldsymbol{\varsigma }}_0}} \right\|$ 表示凸包${C_h}({\boldsymbol{\varsigma }})$ 到目标${S_0}$ 的距离,则对${S_0}$ 的协同围捕要求可表示为[20]$ \mathop {\lim }\limits_{t \to \infty } {P_{{{\boldsymbol{\varsigma }}_0}(t)}}({\boldsymbol{\varsigma }}(t)) = 0 $ 。假设3 令
${{\boldsymbol{\varsigma }}_{ij}} = {{\boldsymbol{\varsigma }}_i} - {{\boldsymbol{\varsigma }}_j}$ ,${r_{{\text{col}}}}$ 为USV间最小安全距离,则系统初始状态满足$\left\| {{{\boldsymbol{\varsigma }}_{ij}}(0)} \right\| \geqslant {r_{{\text{col}}}}$ 。假设4 由于被围对象不可控,集群协同围捕系统是非自治系统,因此本文假设集群成员的机动性能高于被围目标,从而满足围捕问题的可解性。
1.3 通信网络描述
无向图常用于描述集群内的通信网络[24],令
$G = \{ \nu ,\varepsilon \} $ 为由节点集合$\nu = \left\{ {1,2, \cdots ,n} \right\}$ 和边集合$\varepsilon \subseteq \nu \times \nu $ 组成的无向图,其中无向边${\varepsilon _{ij}} \in E$ 表示${S_i}$ 和${S_j}$ 间存在通信连接。将${S_i}$ 通信范围内的成员定义为${S_i}$ 的邻居成员,其编号表示为${N_i} = \big\{ k \in \nu ,k \ne i|\left\| {{{\boldsymbol{\varsigma }}_{ij}}} \right\| \leqslant {r_{{\text{comm}}}} \big\}$ ,其中${r_{{\text{comm}}}}$ 为最大通信距离。图$G$ 的邻接矩阵${\boldsymbol{A}} = {({a_{ij}})_{n \times n}}$ ,其中若存在${\varepsilon _{ij}} \in E$ 则${a_{ij}} = 1$ ;反之${a_{ij}} = 0$ 。节点度矩阵$ {\boldsymbol{D}} = {\text{diag}}\left( {{\nu _{\text{1}}},{\nu _{\text{2}}}, \cdots ,{\nu _n}} \right) $ ,Laplace矩阵${\boldsymbol{L}} = {\boldsymbol{D}} - {\boldsymbol{A}}$ ,对目标的观测矩阵${\boldsymbol{B}} = {\text{diag}}\left( {{b_{\text{1}}},b_2, \cdots ,{b_n}} \right)$ 。假设5 图
$G$ 是保持连通的,目标做加速度未知且有限的运动,但至少存在一个成员可获取目标的位置与速度,即$\exists {b_i} = 1$ 。为便于后文分析,在此介绍以下引理:
引理1[25] 设
${\boldsymbol{z}} \in {\mathbb{R}^n}$ ,${\boldsymbol{\omega }} \in {\mathbb{R}^m}$ ,考虑动态系统:$$ {\boldsymbol{\dot z}} = {\boldsymbol{f}}\left( {{\boldsymbol{z}}\left( t \right),{\boldsymbol{\omega }}\left( t \right)} \right),{\text{ }}{\boldsymbol{f}}\left( {{\boldsymbol{0}},{\boldsymbol{0}}} \right) = {\boldsymbol{0}} $$ (3) 若存在Lyapunov函数
$V({\boldsymbol{z}}) \geqslant 0$ 和${K_\infty }$ 类函数${\phi _{\text{1}}}$ 、${\phi _{\text{2}}}$ 对扰动${\boldsymbol{\omega }}$ 满足$\dot V({\boldsymbol{z}}) \leqslant - {\phi _{\text{1}}}(\left\| {\boldsymbol{z}} \right\|) + {\phi _{\text{2}}}(\left\| {\boldsymbol{\omega }} \right\|)$ ,称为ISS-Lyapunov函数,并称该系统具有输入−状态稳定性。引理2[26] 设
${x_{\text{1}}}, {x_{\text{2}}}, \cdots ,{x_n} \geqslant 0$ ,$0 < p \leqslant 1 $ ,$q > 1$ ,则有:$$ \sum\limits_{i = 1}^n {x_i^p} \geqslant {\left( {\sum\limits_{i = 1}^n {{x_i}} } \right)^p} , \sum\limits_{i = 1}^n {x_i^q} \geqslant {n^{1 - q}}{\left( {\sum\limits_{i = 1}^n {{x_i}} } \right)^q} $$ 引理3[27] 设有离散轨迹序列
$P(k)$ ,则USV在基于非线性模型预测控制的轨迹跟踪时,跟踪误差${e_P}$ 对海洋环境干扰和未建模动力学因素等扰动是ISS稳定的。引理4[28] 在满足假设5的条件下,定义矩阵
${\boldsymbol{H = L}} + {\boldsymbol{B}}$ ,其是正定对称的。2. 算法设计与稳定性分析
图2给出了本节内容设计的USV集群协同围捕控制算法结构,其中目标状态观测器、协同围捕引导器、非线性模型预测控制器以及扰动观测器的算法设计仅依赖邻居成员的非全局信息,与各USV索引编号无关,如图1所示,算法不指定USV间或其与目标的相对位置关系,算法细节将在2.1至2.3节阐述,并在2.4节进行系统稳定性分析。
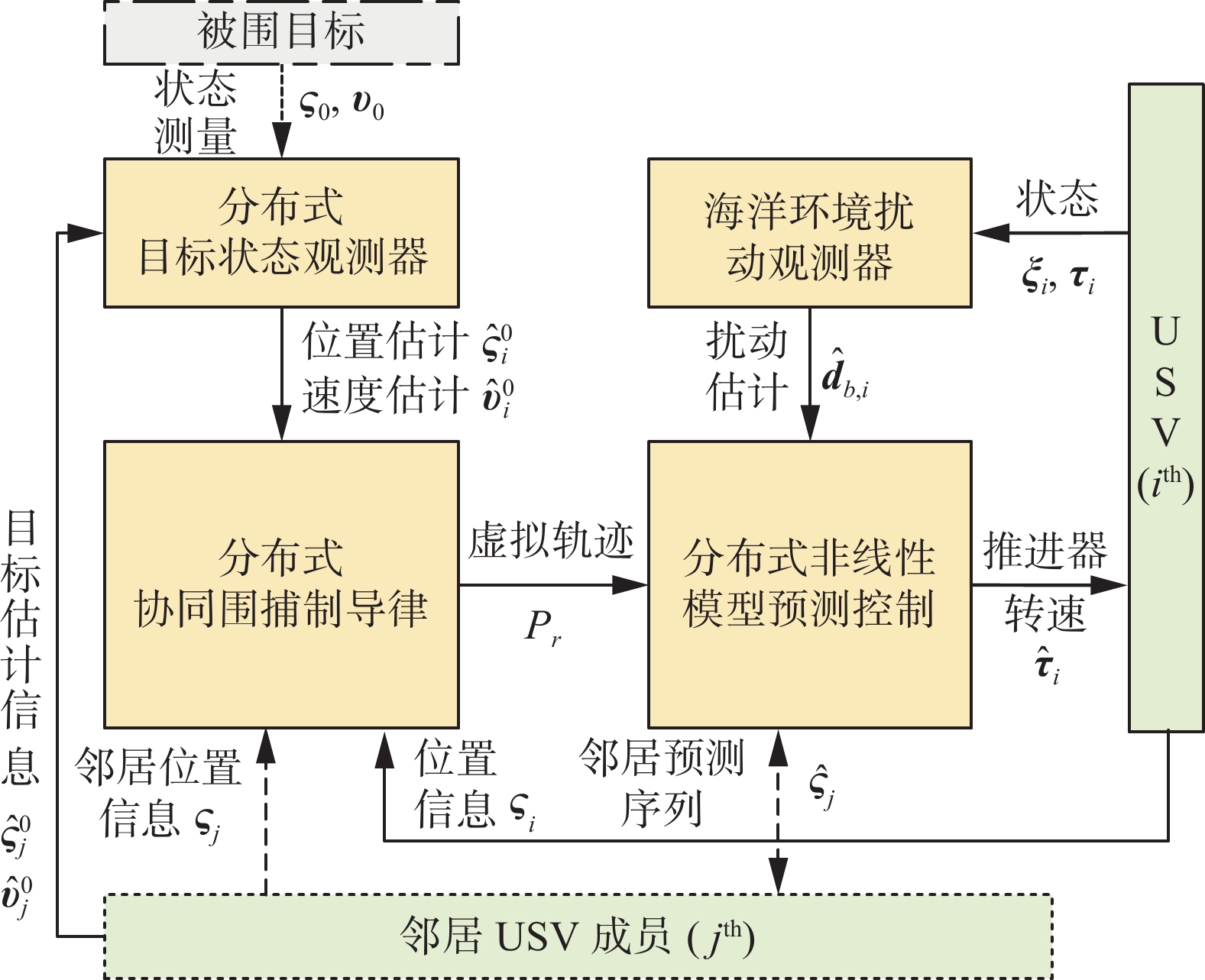 图 2 围捕控制算法结构Fig. 2 Framework of surrounding control algorithm下载:
全尺寸图片
图 2 围捕控制算法结构Fig. 2 Framework of surrounding control algorithm下载:
全尺寸图片
2.1 分布式目标状态观测器
设被围对象
${S_{\text{0}}}$ 的运动模型为$$ \left\{ \begin{gathered} {{{\boldsymbol{\dot \varsigma }}}_{\text{0}}} = {{\boldsymbol{\upsilon }}_{\text{0}}} \\ {{{\boldsymbol{\dot \upsilon }}}_{\text{0}}} = {{\boldsymbol{a}}_{\text{0}}} \\ \end{gathered} \right. $$ 式中:
$ {\boldsymbol{\varsigma }},{\text{ }}{\boldsymbol{\upsilon }},{\text{ }}{\boldsymbol{a}} \in {\mathbb{R}^2} $ ,分别为平面位置、速度、加速度向量,且$\left\| {{{\boldsymbol{a}}_{\text{0}}}} \right\| \leqslant {a^m}$ 。设${S_i}$ 对$ {{\boldsymbol{\varsigma }}_{\text{0}}} $ 、$ {{\boldsymbol{\upsilon }}_{\text{0}}} $ 的观测值为$ \hat{\boldsymbol{\varsigma}}_i^{\text{0}} $ 、$ {{\boldsymbol{\hat \upsilon }}_i}^{\text{0}} $ 。定义$ {\hat a_i}\left( 0 \right) > 0 $ ,$ {\dot {\hat a}_i} = \left\| {{\boldsymbol{\hat e}}_{{\boldsymbol{\upsilon }},i}^{\text{0}}} \right\| $ ,${k_{{\text{1,2}}}} > 0$ ,$0 < p < q$ ,以及$ {\boldsymbol{\hat e}}_{{\boldsymbol{\varsigma }},i}^{\text{0}} $ 和$ {\boldsymbol{\hat e}}_{{\boldsymbol{\upsilon }},i}^{\text{0}} $ 为$$ \left\{ \begin{gathered} {\boldsymbol{\hat e}}_{{\boldsymbol{\varsigma }},i}^{\text{0}} = \sum\limits_{j \in {N_i}} {{a_{ij}}\left( {{{\hat \varsigma }}_i^{\text{0}} - {{\hat \varsigma }}_j^{\text{0}}} \right) + {b_i}\left( {{{\hat \varsigma }}_i^{\text{0}} - {{\boldsymbol{\varsigma }}_{\text{0}}}} \right)} \\ {\boldsymbol{\hat e}}_{{\boldsymbol{\upsilon }},i}^{\text{0}} = \sum\limits_{j \in {N_i}} {{a_{ij}}\left( {{\boldsymbol{\hat \upsilon }}_i^{\text{0}} - {\boldsymbol{\hat \upsilon }}_j^{\text{0}}} \right) + {b_i}\left( {{\boldsymbol{\hat \upsilon }}_i^{\text{0}} - {{\boldsymbol{\upsilon }}_{\text{0}}}} \right)} \\ \end{gathered} \right. $$ 则DTSO的计算公式为
$$ \left\{\begin{array}{l} \dot{\hat{\boldsymbol{\varsigma}}}_i^0=-k_1 \operatorname{sig}^{\tfrac{p}{q}}\left(\hat{\boldsymbol{e}}_{{\boldsymbol{\varsigma}}, i}^0\right)-k_2 \operatorname{sig}^{\tfrac{q}{p}}\left(\hat{\boldsymbol{e}}_{{\boldsymbol{\varsigma}}, i}^0\right)+\hat{\boldsymbol{\upsilon}}_i^0 \\ \dot{\hat{\boldsymbol{\upsilon}}}_i^0=-k_1 \operatorname{sig}^{\tfrac{p}{q}}\left(\hat{\boldsymbol{e}}_{{\boldsymbol{\upsilon}}, i}^0\right)-k_2 \operatorname{sig}^{\tfrac{q}{p}}\left(\hat{\boldsymbol{e}}_{{\boldsymbol{\upsilon}}, i}^0\right)-\hat{a}_i \operatorname{sign}\left(\hat{\boldsymbol{e}}_{{\boldsymbol{\upsilon}}, i}^0\right) \end{array}\right. $$ (4) DTSO的稳定性分析:
设误差
$ \tilde{\boldsymbol{\varsigma}}_i^{\text{0}}=\hat{\boldsymbol{\varsigma}}_i^{\text{0}}-\boldsymbol{\varsigma}_{\text{0}} $ ,$ \tilde{\boldsymbol{\boldsymbol{\upsilon}}}_i^{\text{0}}=\hat{\boldsymbol{\boldsymbol{\upsilon}}}_i^{\text{0}}-\boldsymbol{\upsilon}_{\text{0}} $ ,则有$ \hat{\boldsymbol{e}}_{\boldsymbol{\boldsymbol{\varsigma}},i}^{\text{0}}=\tilde{\boldsymbol{e}}_{\boldsymbol{\varsigma},i}^{\text{0}} $ ,$ \hat{\boldsymbol{e}}_{\boldsymbol{\upsilon},i}^{\text{0}} = \tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon},i}^{\text{0}} $ 。令$ \tilde{\boldsymbol{\varsigma}}^{\text{0}} = \left[\left(\tilde{\boldsymbol{\varsigma}}_{\text{1}}^{\text{0}}\right)^{\text{T}}\ \ \left(\tilde{\boldsymbol{\varsigma}}_{\text{2}}^{\text{0}}\right)^{\text{T}}\ \ \cdots\ \ \left(\tilde{\boldsymbol{\varsigma}}_n^{\text{0}}\right)^{\text{T}}\right]^{\text{T}} $ ,$ \tilde{\boldsymbol{\upsilon}}^{\text{0}} = \left[ \left(\tilde{\boldsymbol{\upsilon}}_{\text{1}}^{\text{0}}\right)^{\text{T}}\ \ \left(\tilde{\boldsymbol{\upsilon}}_{\text{2}}^{\text{0}}\right)^{\text{T}}\ \ \cdots\ \ \left(\tilde{\boldsymbol{\upsilon}}_n^0\right)^{\text{T}} \right]^{\text{T}} $ ,类似地有$ \hat{\boldsymbol{e}}_{\boldsymbol{\varsigma}}^{\text{0}} $ 、$ \hat{\boldsymbol{e}}_{\boldsymbol{\upsilon}}^{\text{0}} $ 、$ \tilde{\boldsymbol{e}}_{\boldsymbol{\varsigma}}^{\text{0}} $ 、$ \tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon}}^{\text{0}} $ :$$ \left\{\begin{gathered}\hat{\boldsymbol{e}}_{\boldsymbol{\varsigma}}^{\text{0}}=\tilde{\boldsymbol{e}}_{\boldsymbol{\varsigma}}^{\text{0}}=\left(\boldsymbol{H}\otimes\boldsymbol{I}_{\text{2}}\right)\tilde{\boldsymbol{\varsigma}}^{\text{0}}=\boldsymbol{M}\tilde{\boldsymbol{\varsigma}}^{\text{0}} \\ \hat{\boldsymbol{e}}_{\boldsymbol{\upsilon}}^{\text{0}}=\tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon}}^{\text{0}}=\left(\boldsymbol{H}\otimes\boldsymbol{I}_{\text{2}}\right)\tilde{\boldsymbol{\upsilon}}^{\text{0}}=\boldsymbol{M}\tilde{\boldsymbol{\upsilon}}^{\text{0}} \\ \end{gathered}\right. $$ 式中
${\boldsymbol{M}} = {\boldsymbol{H}} \otimes {{\boldsymbol{I}}_2} \in {\mathbb{R}^{2n \times 2n}}$ 。设计Lyapunov函数
$ {V_{\text{1}}} $ 计算公式为$$ {V_{\text{1}}} = \frac{1}{2}{\left( {{{{\boldsymbol{\tilde \upsilon }}}^{\text{0}}}} \right)^{\text{T}}}{\boldsymbol{M}}{{\boldsymbol{\tilde \upsilon }}^{\text{0}}} + \frac{1}{2}\sum\limits_{i = 1}^n {{{({a^m} - {{\hat a}_i})}^2}} $$ (5) 根据引理2,对式(5)作如下推导:
$$ \begin{aligned} \dot{V}_1= \left(\tilde{\boldsymbol{\upsilon}}^0\right)^{\mathrm{T}} \boldsymbol{M}\left[-k_1 \operatorname{sig}^{\tfrac{p}{q}}\left(\boldsymbol{M} \tilde{\boldsymbol{\upsilon}}^0\right)-k_2 \operatorname{sig}^{\tfrac{q}{p}}\left(\boldsymbol{M} \tilde{\boldsymbol{\upsilon}}^0\right)\right]- \\ \left(\tilde{\boldsymbol{\upsilon}}^0\right)^{\mathrm{T}} \boldsymbol{M}\left[\begin{array}{c} \hat{a}_1 \operatorname{sign}\left(\tilde{\boldsymbol{e}}_{{\boldsymbol{\upsilon}}, 1}^0\right)+\boldsymbol{a}_0 \\ \vdots \\ \hat{a}_n \operatorname{sign}\left(\tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon}, n}^0\right)+\boldsymbol{a}_0 \end{array}\right]+\sum_{i=1}^n\left(\hat{a}_i-a^m\right) \cdot \dot{\hat{a}}_i \end{aligned} $$ $$ \begin{gathered}\dot{V}_{\text{1}}\leqslant-k_{\text{1}}\left(\frac{2\mathit{\lambda}_{\text{min}}^{\text{2}}}{\mathit{\lambda}_{\text{max}}}\right)^{\frac{p+q}{2q}}\left(\frac{1}{2}\left(\tilde{\boldsymbol{\upsilon}}^{\text{0}}\right)^{\text{T}}\boldsymbol{M}\tilde{\boldsymbol{\upsilon}}^{\text{0}}\right)^{\frac{p+q}{2q}}- \\ k_{\text{2}}\left(2n\right)^{1-\frac{p+q}{2p}}\left(\frac{2\mathit{\lambda}_{\text{min}}^2}{\mathit{\lambda}_{\text{max}}}\right)^{\frac{p+q}{2p}}\left(\frac{1}{2}\left(\tilde{\boldsymbol{\upsilon}}^{\text{0}}\right)^{\text{T}}\boldsymbol{M}\tilde{\boldsymbol{\upsilon}}^{\text{0}}\right)^{\frac{p+q}{2p}}+ \\ \sum\limits_{i=1}^n\left(\tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon},i}^{\text{0}}\right)^{\text{T}}\left[-\hat{a}_i\text{sign}\left(\tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon},i}^{\text{0}}\right)-a_{\text{0}}\right]+\sum\limits_{i=1}^n\left(\hat{a}_i-a^m\right) \left\| \tilde{\boldsymbol{e}}_{\boldsymbol{\upsilon},i}^{\text{0}} \right\| \leqslant \\ -\sigma_{\text{1}}\Omega^{\frac{p+q}{2q}}-\sigma_{\text{2}}\Omega^{\frac{p+q}{2p}} \\ \end{gathered} $$ 式中:
$ {\sigma _1} = {k_{\text{1}}}{\left( {2\lambda _{{\text{min}}}^{\text{2}}/{\lambda _{{\text{max}}}}} \right)^{\tfrac{{p + q}}{{2q}}}} $ ,$ {\lambda _{{\text{min}}}} $ 和$ {\lambda _{\max }} $ 为$ {\boldsymbol{M}} $ 的最小、最大特征值,$ {\sigma _2} = {k_{\text{2}}}{\left( {2n} \right)^{1 - \tfrac{{p + q}}{{2p}}}}{\left( {2\lambda _{{\text{min}}}^{\text{2}}/{\lambda _{{\text{max}}}}} \right)^{\tfrac{{p + q}}{{2p}}}} $ ,$ \mathit{\Omega}= \dfrac{1}{2}\left(\tilde{\boldsymbol{\upsilon}}^{\text{0}}\right)^{\text{T}}\boldsymbol{M}\tilde{\boldsymbol{\upsilon}}^{\text{0}} $ 。注意到仅当$ \tilde{\boldsymbol{\upsilon}}^{\text{0}}=\boldsymbol{0} $ ,$ {\hat a_i} = {a^m} $ 时$ {\dot V_{\text{1}}} = 0 $ ,因此$\mathop {\lim }\limits_{t \to \infty } {{\boldsymbol{\hat \upsilon }}_i}^{\text{0}} = {{\boldsymbol{\upsilon }}_{\text{0}}}$ , 从而速度观测误差满足渐进稳定性。进一步可知观测误差满足$ \left\| \boldsymbol{M}\tilde{\boldsymbol{\upsilon}}^{\text{0}} \right\| \leqslant\delta_{\text{1}} $ 。设计Lyapunov函数
$ {V_{\text{2}}} $ 计算公式为$$ {V_{\text{2}}} = \frac{1}{2}{\left( {{{{{\tilde \varsigma }}}^0}} \right)^{\text{T}}}{\boldsymbol{M}}{{{\tilde \varsigma }}^{\text{0}}} $$ (6) 根据引理2,对式(6)作如下推导:
$$ \begin{gathered} {{\dot V}_{\text{2}}} = {\left( {{{{{\tilde \varsigma }}}^0}} \right)^{\text{T}}}{\boldsymbol{M}}\left\{ { - {k_{\text{1}}}{\text{si}}{{\text{g}}^{\tfrac{p}{q}}}({\boldsymbol{M}}{{{{\tilde \varsigma }}}^{\text{0}}}) - {k_{\text{2}}}{\text{si}}{{\text{g}}^{\tfrac{q}{p}}}({\boldsymbol{M}}{{{{\tilde \varsigma }}}^{\text{0}}}) + {{{{\tilde \upsilon }}}^{\text{0}}}} \right\} \leqslant \\ - {\sigma _{\text{1}}}{V_{\text{2}}}^{\tfrac{{p + q}}{{2q}}} - {\sigma _{\text{2}}}{V_2}^{\tfrac{{p + q}}{{2p}}} + {\left( {{{{{\tilde \varsigma }}}^0}} \right)^{\text{T}}}{\boldsymbol{M}}{{{{\tilde \upsilon }}}^{\text{0}}} \leqslant \\ - {\sigma _{\text{3}}}{V_{\text{2}}}^{\tfrac{{p + q}}{{2q}}} - {\sigma _{\text{2}}}{V_{\text{2}}}^{\tfrac{{p + q}}{{2p}}} + \left\| {{{{{\tilde \varsigma }}}^{\text{0}}}} \right\|\left( {{\delta _1} - {\zeta _{\text{1}}}\lambda _{{\text{min}}}^{\tfrac{{p + q}}{{2q}}}{{\left\| {{{{{\tilde \varsigma }}}^{\text{0}}}} \right\|}^{\tfrac{{p - q}}{{2q}}}}} \right)\leqslant \\ {\phi _{\text{1}}}\left( {\left\| {{{{{\tilde \varsigma }}}^{\text{0}}}} \right\|} \right) + {\phi _{\text{2}}}\left( {{\delta _{\text{1}}}} \right) \\ \end{gathered} $$ 式中:
$ {\sigma _3} = {\sigma _1} - {\zeta _{\text{1}}}{\left( {2n} \right)^{\tfrac{{q - p}}{{2q}}}}{(2\lambda _{{\text{max}}}^{\text{2}}/{\lambda _{{\text{min}}}})^{\tfrac{{p + q}}{{2q}}}} $ ,${\zeta _{\text{1}}}$ 为系数满足$0 < {\zeta _{\text{1}}} < {k_{\text{1}}}{\left( {2n} \right)^{\tfrac{{p - q}}{{2q}}}}{({\lambda _{{\text{min}}}}/{\lambda _{\max }})^{\tfrac{{3\left( {p + q} \right)}}{{2q}}}}$ 。因此根据引理1,$ \tilde{\boldsymbol{\varsigma}}^{\text{0}} $ 对${\delta _{\text{1}}}$ 满足ISS性质,又因$\mathop {\lim }\limits_{t \to \infty } {\delta _1} = 0$ ,故$\mathop {\lim }\limits_{t \to \infty } {{{\hat {\boldsymbol{\varsigma}} }}_i}^{\text{0}} = {{\boldsymbol{\varsigma }}_{\text{0}}}$ ,位置观测误差满足渐进稳定性。所以设计的观测器是渐进稳定的,证毕。2.2 分布式协同围捕引导律
基于航向角坐标系的USV运动学模型如图3所示,设
$\beta = \arctan \left( {u/v} \right)$ 为漂角,$\chi = \psi + \beta $ 为实际航向角,$ \left[\mu^r\ \ \chi^r\right] $ 为参考速度与航向角,$ \boldsymbol{R}_{\text{1}}\left(\theta\right)= \left[\cos\theta\ \ \sin\theta\right]^{\text{T}} $ 。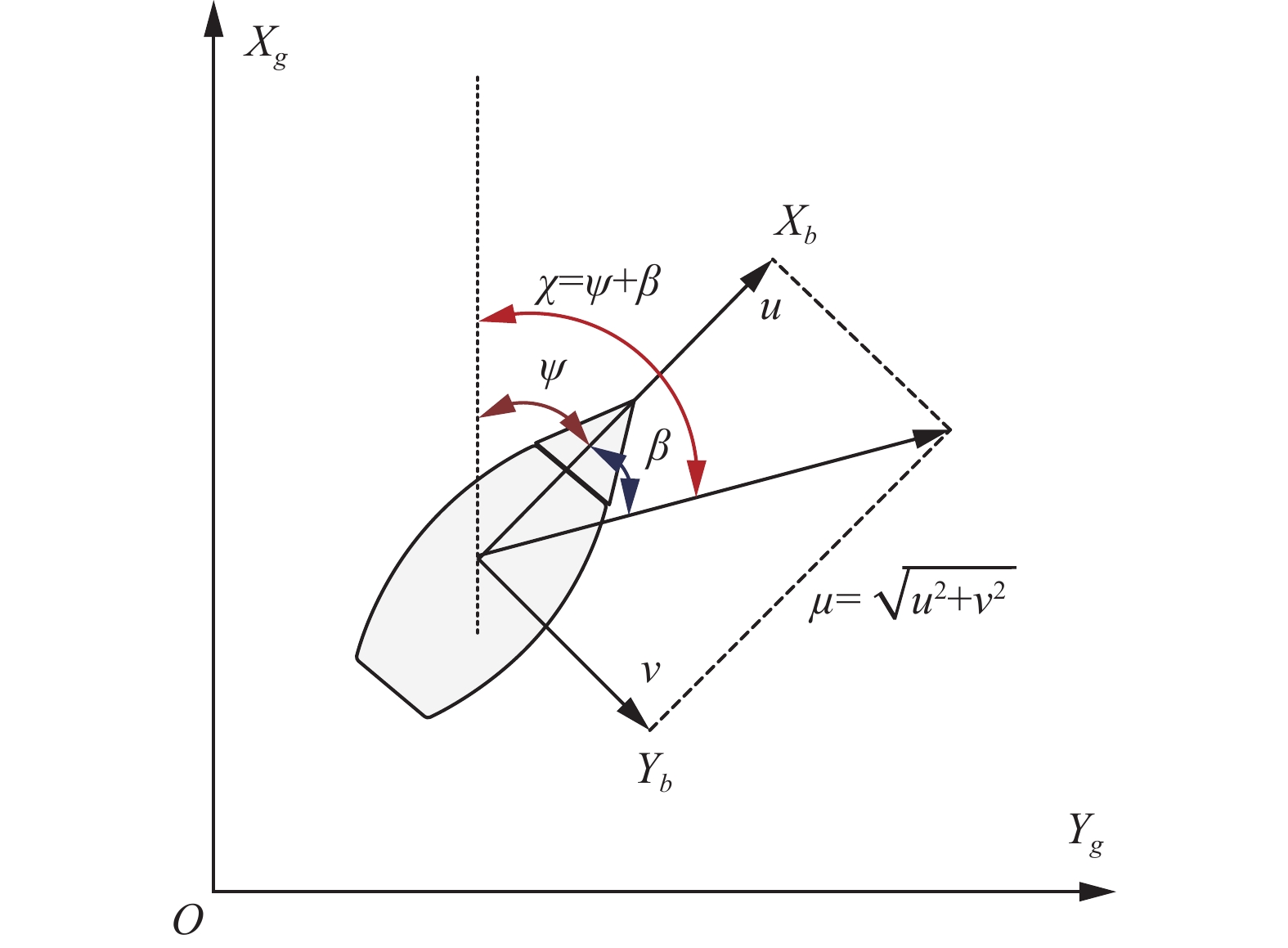 图 3 基于航向角坐标系的USV运动学模型Fig. 3 USV kinematic model based on heading frame下载:
全尺寸图片
图 3 基于航向角坐标系的USV运动学模型Fig. 3 USV kinematic model based on heading frame下载:
全尺寸图片
基于航向角坐标系的USV运动学模型表示为
$$ \left\{ \begin{gathered} {\boldsymbol{\dot \varsigma }} = {{\boldsymbol{R}}_{\text{1}}}\left( {{\chi ^r} + \tilde \chi } \right) \cdot \left( {{\mu ^r} + \tilde \mu } \right) = {{\boldsymbol{R}}_{\text{1}}}\left( {{\chi ^r}} \right) \cdot {\mu ^r} + {{\boldsymbol{e}}_r} \\ {{\boldsymbol{e}}_r} = \left[ {{{\boldsymbol{R}}_{\text{1}}}\left( \chi \right) - {{\boldsymbol{R}}_{\text{1}}}\left( {{\chi ^r}} \right)} \right]\left( {{\mu ^r} + \tilde \mu } \right) + {{\boldsymbol{R}}_{\text{1}}}\left( {{\chi ^r}} \right) \cdot \tilde \mu \\ \end{gathered} \right. $$ (7) 式中:
$\tilde \chi = \chi - {\chi ^r}$ ,$\tilde \mu = \mu - {\mu ^r}$ 表示参考速度、航向与实际的误差。设${S_i}$ 的位置为$ {{\boldsymbol{\varsigma }}_i} $ ,$ {{\boldsymbol{F}}_i} $ 为成员间排斥作用项,$ {k_{{\text{rep}}}} > 0 $ ,$ {k_\varsigma } > 0 $ ,则设计围捕引导律为$$ \left\{ \begin{gathered} {{\boldsymbol{R}}_{\text{1}}}\left( {{\chi _i}^r} \right) \cdot {\mu _i}^r = {k_{{\text{rep}}}}{{\boldsymbol{F}}_i} + {k_\varsigma }({{{{\hat \varsigma }}}_i}^{\text{0}} - {{\boldsymbol{\varsigma }}_i}) + {{\hat \upsilon }}_i^{\text{0}} \\ {{\boldsymbol{F}}_i} = \sum\limits_{j \in {N_i}} {\left( {\frac{1}{{\left\| {{{\boldsymbol{\varsigma }}_{ij}}} \right\| - {r_{{\text{col}}}}}} - \frac{1}{{{r_{{\text{comm}}}} - {r_{{\text{col}}}}}}} \right)\frac{{{{\boldsymbol{\varsigma }}_{ij}}}}{{\left\| {{{\boldsymbol{\varsigma }}_{ij}}} \right\|}}} \\ \end{gathered} \right. $$ (8) 2.3 扰动观测器与分布式非线性模型预测控制
2.3.1 扰动观测器设计
设
$ \hat{\boldsymbol{\omega}}_b $ 为扰动$ {{\boldsymbol{\omega }}_b} $ 的观测值,$ {k_d} \in {\mathbb{R}^ + } $ ,则扰动观测器设计为$$ \left\{ \begin{gathered} {{{{\hat \omega }}}_b} = {\boldsymbol{\varepsilon }} + {k_d}{\boldsymbol{\xi }} \\ {\boldsymbol{\dot \varepsilon }} = - {k_d}\left( {{{{{\hat \omega }}}_b} + {\boldsymbol{F}}({\boldsymbol{\xi }},{\boldsymbol{\tau }},0)} \right) \\ \end{gathered} \right. $$ 扰动观测器稳定性分析:
令观测误差
$ \tilde{\boldsymbol{\omega}}_b=\hat{\boldsymbol{\omega}}_b-\boldsymbol{\omega}_b $ ,设计Lyapunov函数$ {V_{\text{3}}} $ 为$$ {V_{\text{3}}} = \frac{1}{2}{{\tilde {\boldsymbol{\omega}} }}_b^{\text{T}}{{{\tilde {\boldsymbol{\omega}} }}_b} $$ 将
$ {V_{\text{3}}} $ 对时间求导,并得到如下推导过程:$$ \begin{gathered} {{\dot V}_{\text{3}}} = {{\tilde {\boldsymbol{\omega}} }}_b^{\text{T}} \cdot \left( {{\boldsymbol{\dot \varepsilon }} + {k_d}{\boldsymbol{\xi }} - {{{\boldsymbol{\dot \omega }}}_b}} \right) = {{\tilde {\boldsymbol{\omega}} }}_b^{\text{T}} \cdot \left( { - {k_d}{{{{\tilde d}}}_b} - {{{\boldsymbol{\dot \omega }}}_b}} \right) = \\ - 2{k_d}{V_{\text{3}}} - {{\tilde {\boldsymbol{\omega}} }}_b^{\text{T}}{{{\boldsymbol{\dot \omega }}}_b} \leqslant - 2\left( {{k_d} - {\zeta _2}} \right){V_{\text{3}}} + \left\| {{{{{\tilde {\boldsymbol{\omega}} }}}_b}} \right\|({d_{{\text{max}}}} - {\zeta _{\text{2}}}\left\| {{{{{\tilde {\boldsymbol{\omega}} }}}_b}} \right\|) \leqslant \\ {\phi _{\text{3}}}\left( {\left\| {{{{{\tilde {\boldsymbol{\omega}} }}}_b}} \right\|} \right) + {\phi _{\text{4}}}\left( {{\omega _{{\text{max}}}}} \right) \\ \end{gathered} $$ 式中
$0 < {\zeta _{\text{2}}} < {k_d}$ 。根据引理1,$ {{{\tilde {\boldsymbol{\omega}} }}_b} $ 对$ {\omega _{{\text{max}}}} $ 满足ISS性质,因此扰动观测器可以实现观测误差一致最终有界,证毕。2.3.2 DNMPC设计
根据式(8)计算虚拟离散参考轨迹
$ {P_{r,k + 1}} = {P_{r,k}} + \mu _{i,k}^r{{\boldsymbol{R}}_{\text{1}}}\left( {\chi _{i,k}^r} \right) \cdot \Delta T $ ,$ k \in \mathbb{N} $ 为步数,$\Delta T$ 为步长,可知当轨迹跟踪误差$ \boldsymbol{e}_P $ 有界时,$ {{\boldsymbol{e}}_r} $ 有界。设计DNMPC优化目标函数与硬约束为
$$ \begin{gathered} \mathop {\min }\limits_{{{{{\hat {\boldsymbol{\tau}} }}}_i}} {J_i} = \sum\limits_{k = 1}^{{N_p} - 1} {{J_s}\left( {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,k}},{\boldsymbol{\varsigma }}_{i,k}^r} \right)} + \sum\limits_{k = 0}^{{N_p} - 1} {{J_c}\left( {{{{{\hat {\boldsymbol{\tau}} }}}_{i,k}}} \right)} + {J_t}\left( {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,{N_p}}},{\boldsymbol{\varsigma }}_{i,{N_p}}^r} \right) \end{gathered} $$ (9) $$ \begin{gathered} {J_s}\left( {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,k}},{\boldsymbol{\varsigma }}_{i,k}^r} \right) = {\left\| {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,k}} - {\boldsymbol{\varsigma }}_{i,k}^r} \right\|_{{{\boldsymbol{Q}}_s}}} \\ {J_c}\left( {{{{{\hat {\boldsymbol{\tau}} }}}_{i,k}}} \right) = {\left\| {{{{{\hat {\boldsymbol{\tau}} }}}_{i,k}}} \right\|_{{{\boldsymbol{Q}}_c}}} \\ {J_t}\left( {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,{N_p}}},{\boldsymbol{\varsigma }}_{i,{N_p}}^r} \right) = {\left\| {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,{N_p}}} - {\boldsymbol{\varsigma }}_{i,{N_p}}^r} \right\|_{{{\boldsymbol{Q}}_t}}} \\ \end{gathered} $$ $$ \left\{ \begin{gathered} 0 \leqslant \left| {{{\boldsymbol{\tau}} _{p,s}}} \right| \leqslant {\tau _{{\text{max}}}} \\ \left\| {{{{{\hat {\boldsymbol{\varsigma}} }}}_{i,k}} - {{{{\hat {\boldsymbol{\varsigma}} }}}_{j,k}}} \right\| \geqslant {r_{{\text{col}}}},j \in {N_i} \\ \end{gathered} \right. $$ (10) $$ {{\boldsymbol{\hat \eta }}_{k + 1|k}} = {f_{\Delta T}}\left( {{{{{\hat {\boldsymbol{\eta}} }}}_k},{{{{\hat {\boldsymbol{\xi}} }}}_k},{{{{\hat {\boldsymbol{\tau}} }}}_k},{{\boldsymbol{R}}^{\mathrm{T}}}\left( {{\psi _k}} \right){{{{\hat {\boldsymbol{\omega}} }}}_g}} \right) $$ (11) 式中:
${N_p}$ 为总预测长度,$ {{{\hat {\boldsymbol{\varsigma}} }}_{i,k}} $ 和$ {{{\hat {\boldsymbol{\tau}} }}_{i,k}} $ 分别对$ k $ 时刻的状态预测与控制预测,$ {{{\hat {\boldsymbol{\varsigma}} }}_{j,k}} $ 为邻居成员${S_j}$ 对$ k $ 时刻的状态预测,${S_i}$ 与${S_j}$ 间可通过稀疏网络互相传输状态预测信息,${J_s}$ 、${J_c}$ 与${J_t}$ 分别为状态、控制输入成本函数与终端成本函数,${{\boldsymbol{Q}}_s}$ 、$ {{\boldsymbol{Q}}_c} $ 、$ {{\boldsymbol{Q}}_t} $ 为正定权重矩阵。推进器的转速限制与成员间的最小避碰距离以硬约束的形式在式(10)中描述。状态预测方程(省略索引下角标
$i$ )如式(11)所述,其中$ {f_{\Delta T}} $ 可通过对动力学方程(1)的离散化得到,并在预测步数内计算状态预测量$ \hat{\boldsymbol{\varsigma}}_{i,k+1|k} $ 。在每轮模型预测的初始时刻有$ \hat{\boldsymbol{\varsigma}}_{i,0}=\boldsymbol{\varsigma}_i $ ,每轮取该次计算得到的控制预测序列中的第一个控制向量$ {{{\hat \tau }}_{i,0}} $ 作为该次的实际控制输入。2.4 协同围捕控制系统稳定性分析
考虑2.1至2.3节设计的协同围捕控制级联系统,令
$ \tilde{\boldsymbol{\varsigma}}=\displaystyle\sum\limits_{i=1}^n\left(\boldsymbol{\varsigma}_i-\boldsymbol{\varsigma}_0\right) $ ,设计Lyapunov函数$ {V_{\text{4}}} $ :$$ V_{\text{4}}=\frac{1}{2}\tilde{\boldsymbol{\varsigma}}^{\text{T}}\tilde{\boldsymbol{\varsigma}} $$ 将
$ {V_{\text{4}}} $ 对时间求导,注意到$ \displaystyle\sum\limits_{i = 1}^n {{k_{{\text{rep}}}}{{\boldsymbol{F}}_i}} = 0 $ ,$ \tilde{\boldsymbol{\varsigma}}_i^0 $ 、$ \tilde{\boldsymbol{\upsilon}}_i^{\text{0}} $ 、$ {{\boldsymbol{e}}_{r,i}} $ 均有界,故有$ \left\| \tilde{\boldsymbol{\varsigma}}_i^{\text{0}}+\tilde{\boldsymbol{\upsilon}}_i^{\text{0}}+\boldsymbol{e}_{r,i} \right\| \leqslant\delta_{\text{2}} $ ,并存在$0 < {\zeta _2} < {k_{\boldsymbol{\varsigma}} }$ ,得到如下推导过程:$$ \begin{gathered} {{\dot V}_{\text{4}}} = {{{{\tilde {\boldsymbol{\varsigma}} }}}^{\text{T}}} \cdot \sum\limits_{i = 1}^n {\left( {{{{\boldsymbol{\dot \varsigma }}}_i} - {{\boldsymbol{\upsilon }}_{\text{0}}}} \right)} = \\ {{{{\tilde {\boldsymbol{\varsigma}} }}}^{\text{T}}} \cdot \sum\limits_{i = 1}^n {\left( {{k_{{\text{rep}}}}{{\boldsymbol{F}}_i} + {k_{\boldsymbol{\varsigma}} }({{{{\hat {\boldsymbol{\varsigma}} }}}_i}^{\text{0}} - {{\boldsymbol{\varsigma }}_i}) + {{\hat {\boldsymbol{\upsilon}} }}_i^{\text{0}} + {{\boldsymbol{e}}_{r,i}} - {{\boldsymbol{\upsilon }}_{\text{0}}}} \right)} = \\ {{{{\tilde {\boldsymbol{\varsigma}} }}}^{\text{T}}}\left( { - {k_{\boldsymbol{\varsigma}} }{{\tilde {\boldsymbol{\varsigma}} }} + {k_{\boldsymbol{\varsigma}} }{{{{\tilde {\boldsymbol{\varsigma}} }}}_i}^{\text{0}} + {{\tilde {\boldsymbol{\upsilon}} }}_i^{\text{0}} + {{\boldsymbol{e}}_{r,i}}} \right) \leqslant \\ - 2\left( {{k_{\boldsymbol{\varsigma}} } - {\zeta _2}} \right){V_{\text{4}}} + \left\| {{{\tilde {\boldsymbol{\varsigma}} }}} \right\|\left( {{\delta _{\text{2}}} - {\zeta _2}\left\| {{{\tilde {\boldsymbol{\varsigma}} }}} \right\|} \right) \leqslant \\ {\phi _5}\left( {\left\| {{{\tilde {\boldsymbol{\varsigma}} }}} \right\|} \right) + {\phi _6}\left( {{\delta _{\text{2}}}} \right) \\ \end{gathered} $$ 式中
$ {k_{\boldsymbol{\varsigma}} } - {\zeta _2} > 0 $ ,因此根据引理1,$ {{\tilde {\boldsymbol{\varsigma}} }} $ 满足对${\delta _2}$ 的ISS性质。这表明包围圈中心点到被围对象的距离$ \left\| {{{\tilde {\boldsymbol{\varsigma}} }}} \right\| $ 满足原点邻域的一致最终有界稳定性,且该界限受$ {k_{\boldsymbol{\varsigma}} } $ 调控。注意到包围圈大小可由式(8)中的排斥系数$ {k_{{\text{rep}}}} $ 调控,故存在一组$ {k_{{\text{rep}}}} $ 、$ {k_{\boldsymbol{\varsigma}} } $ 使得被捕对象在集群成员形成的凸包内。因此控制算法可以实现定义1中凸包到目标的距离渐进收敛到0。3. 仿真实验与分析
3.1 仿真实验参数
本节内容数值仿真实验的形式对第2节提出的协同围捕算法进行验证,使用计算机自动微分代数系统(computer algebra system for automatic differentiation, CASADi)[29]与内点法优化器(interior point optimizer, IPO)作为非线性优化问题求解工具。
设USV集群成员个数
$n = 4$ ,动力学模型系数参考文献[30]中并忽略非线性阻尼项,控制器参数$ {k_u} = 0.15 $ ,$ {k_r} = 0.18 $ 。DTSO参数${k_{\text{1}}} = 1.5$ ,${k_{\text{2}}} = 0.8$ ,$p = 3$ ,$q = 5$ 。集群协同围捕引导律参数$ {k_{{\text{rep}}}} = 2.5 $ ,$ {k_\varsigma } = 0.3 $ ,$ {r_{{\text{col}}}} = 6 $ ,$ {r_{{\text{comm}}}} = 9 $ 。扰动观测器参数$ {k_d} = 1.2 $ 。DNMPC中前向预测时间
${N_p} = 5$ s,成本函数权重矩阵分别为${{\boldsymbol{Q}}_s} = {{\boldsymbol{Q}}_t} = {\text{diag}}\left( {5,5} \right)$ ,$ {{\boldsymbol{Q}}_c} = {\text{diag}}\left( {{10}^{ - 3}}, {{10}^{ - 3}} \right) $ ,$ {\tau _{{\text{max}}}} = 5 $ r/s,仿真过程中欧拉法步长与模型预测步长$\Delta T = 0.1$ s,状态与控制预测序列长度为50,仿真时间为$0 \leqslant t \leqslant 100$ s。成员
${{\boldsymbol{\eta }}_{\text{1}}}\left( 0 \right) = {\left[ {6 \;\;\; 0 \;\;\; 0.5{\text{π}}} \right]^{\text{T}}}$ 、${{\boldsymbol{\eta }}_{\text{2}}}\left( 0 \right) = {\left[ { - 6 \;\;\; 0 \;\;\; 0.5{\text{π}}} \right]^{\text{T}}}$ 、${{\boldsymbol{\eta }}_{\text{3}}}\left( 0 \right) = {\left[ {0 \;\;\; 6 \;\;\; 0.5{\text{π }}} \right]^{\text{T}}}$ 、${{\boldsymbol{\eta }}_{\text{4}}}\left( 0 \right) = {\left[ {0 \;\;\; - 6 \;\;\; 0.5{\text{π}}} \right]^{\text{T}}}$ ,初始速度为$ {{\boldsymbol{\xi }}_i}\left( 0 \right) = {\left[ {0.1 \;\;\; 0.01 \;\;\; 0} \right]^{\text{T}}} $ ,初始控制输入${\boldsymbol{\tau }} = 0$ ,扰动观测器初值为$ {{{\hat {\boldsymbol{\omega}} }}_b}\left( 0 \right) = {{{\hat {\boldsymbol{\omega}} }}_g}\left( 0 \right) = 0 $ ,$ {\boldsymbol{\varepsilon }}\left( 0 \right) = 0 $ ,DTSO初值$ {{\hat {\boldsymbol{\varsigma}} }}_i^{\text{0}}\left( 0 \right) = {\left[ {0 \;\;\; 5} \right]^{\text{T}}} $ ,$ {{\hat {\boldsymbol{\upsilon}} }}_i^{\text{0}}\left( 0 \right) = 0 $ ,$ {\hat a_i}\left( 0 \right) = 0.1 $ 。被围目标的初始位置为
$ {{\boldsymbol{\varsigma }}_{\text{0}}}\left( 0 \right) = {\left[ {0 \;\;\; 10} \right]^{\text{T}}} $ ,速度为$ {{\boldsymbol{\xi }}_{\text{0}}} = {\left[ {0.5\cos \left( {{\text{0}}{\text{.02}} \text{π} t} \right) \;\;\; 0.9} \right]^{\text{T}}} $ ,设围捕过程中只有索引为1和2的USV集群成员能获取目标状态信息,即观测矩阵${\boldsymbol{B}} = {\text{diag}}\left( {1,1,0,0} \right)$ 。海洋环境扰动作用设置为$ {{\boldsymbol{\omega }}_g}(t) = \sin \left( {0.004{\text{π}}t} \right) \cdot {\left[ {5 \;\;\; 12 \;\;\; 2} \right]^{\text{T}}} $ 。3.2 实验结果分析
USV集群协同围捕过程如图4、5所示,不同的线条颜色分别表示了被围对象与集群成员的移动轨迹,并每间隔5 s画出一次所有成员形成的凸包形状。可以发现,4个USV成员在使用第2节设计的协同围捕算法下,快速地将目标围入成员构成的凸包内(如图4中的矩形所示),并且所构成凸包的大小与形状稳定,与目标近似同步移动。
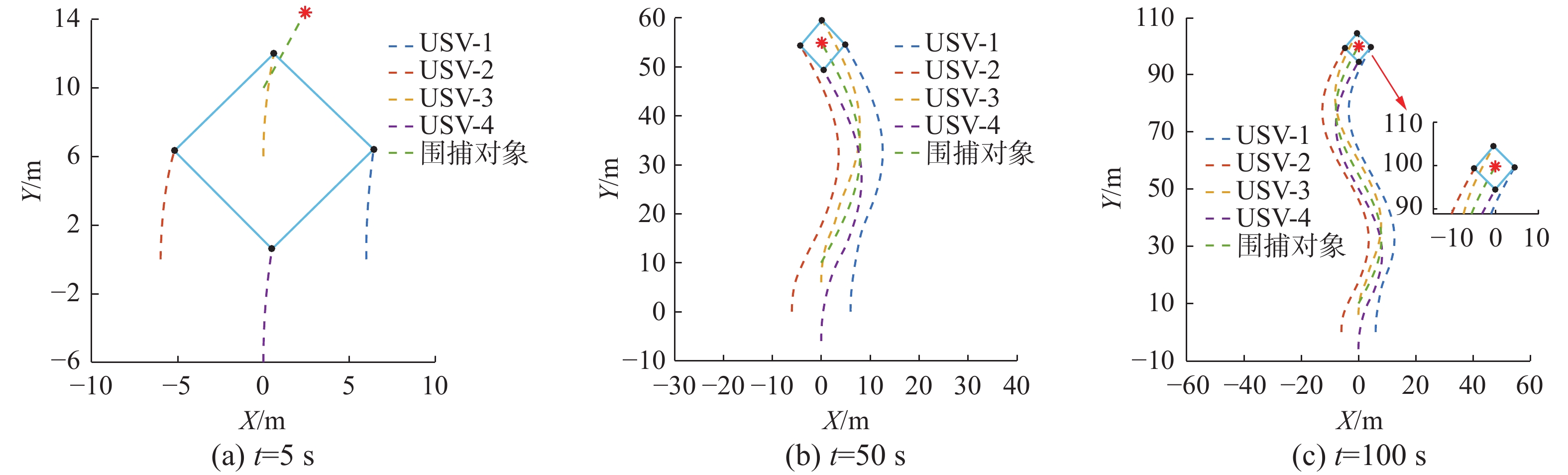 图 4 无人艇集群协同围捕过程Fig. 4 Collaborative surrounding process of USV swarm下载:
全尺寸图片
图 4 无人艇集群协同围捕过程Fig. 4 Collaborative surrounding process of USV swarm下载:
全尺寸图片
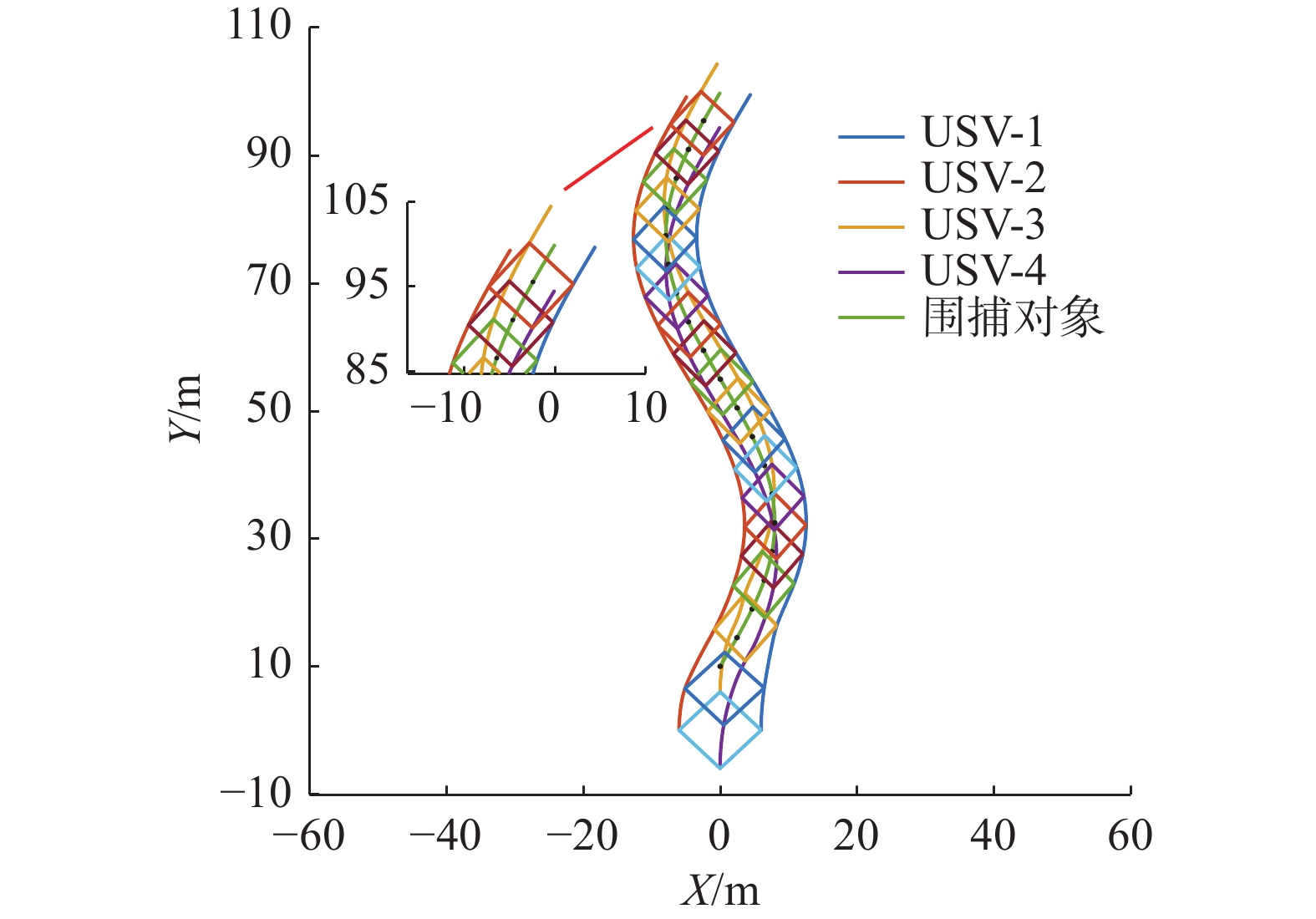 图 5 协同围捕中的凸包形状Fig. 5 Convex hull shapes of collaborative surrounding下载:
全尺寸图片
图 5 协同围捕中的凸包形状Fig. 5 Convex hull shapes of collaborative surrounding下载:
全尺寸图片
图6为协同围捕过程中USV集群成员间的距离变化,并用不同颜色线条标注避碰距离与通信范围。在初始阶段(
$0 \leqslant t \leqslant 15$ s),包围圈尚未稳定时,全部成员趋向靠近目标的方向航行,故该过渡过程中USV间距离逐渐减小,$t > 15$ s后船间距离趋于稳定。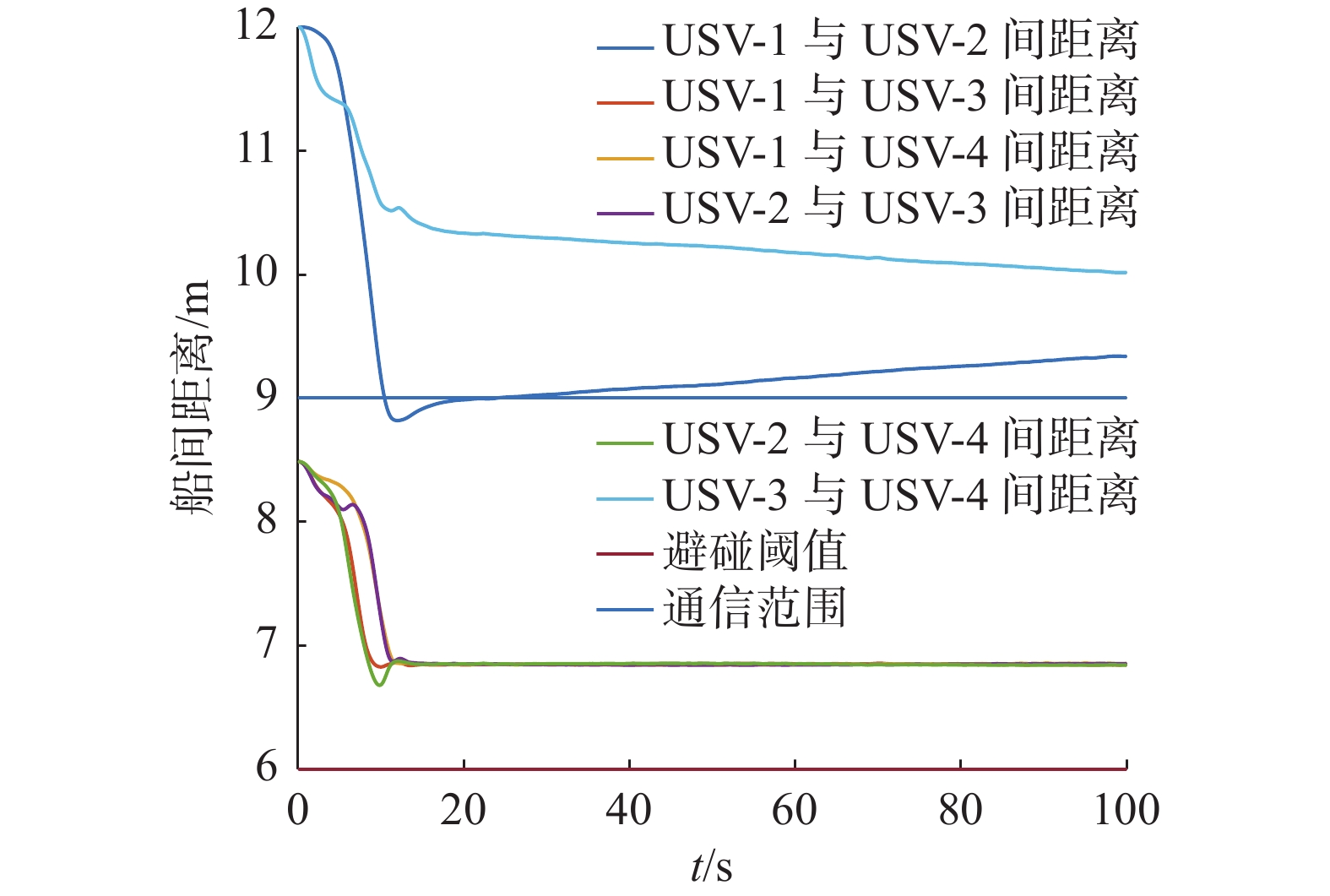 图 6 无人艇集群成员间距离与阈值Fig. 6 Distance and threshold between USV swarm members下载:
全尺寸图片
图 6 无人艇集群成员间距离与阈值Fig. 6 Distance and threshold between USV swarm members下载:
全尺寸图片
DNMPC设计考虑了USV的动力学模型,且可使用邻居成员的位置信息添加船间距离硬约束,因此本算法在围捕过程中船间距离均保持大于安全距离。同时观察到USV-1与USV-2、USV-3与USV-4间的距离超过了通信范围(集群无向图
$G$ 仍然连通),由于控制算法仅需邻居成员的信息而非全局信息,因此对协同围捕任务无影响。协同围捕过程中USV集群成员构成的凸包区域中心与目标位置的关系如图7、8所示。图7中曲线分别为目标移动轨迹与围捕区域中心轨迹,可观察到围捕区域中心渐渐与目标移动轨迹近似重合,二者间的距离随时间变化曲线如图7所示,观察到
$t > 15$ s后二者距离减小至约0.5 m,处于有界稳定状态,这与图4所示的稳定阶段对应,说明已对目标形成围捕。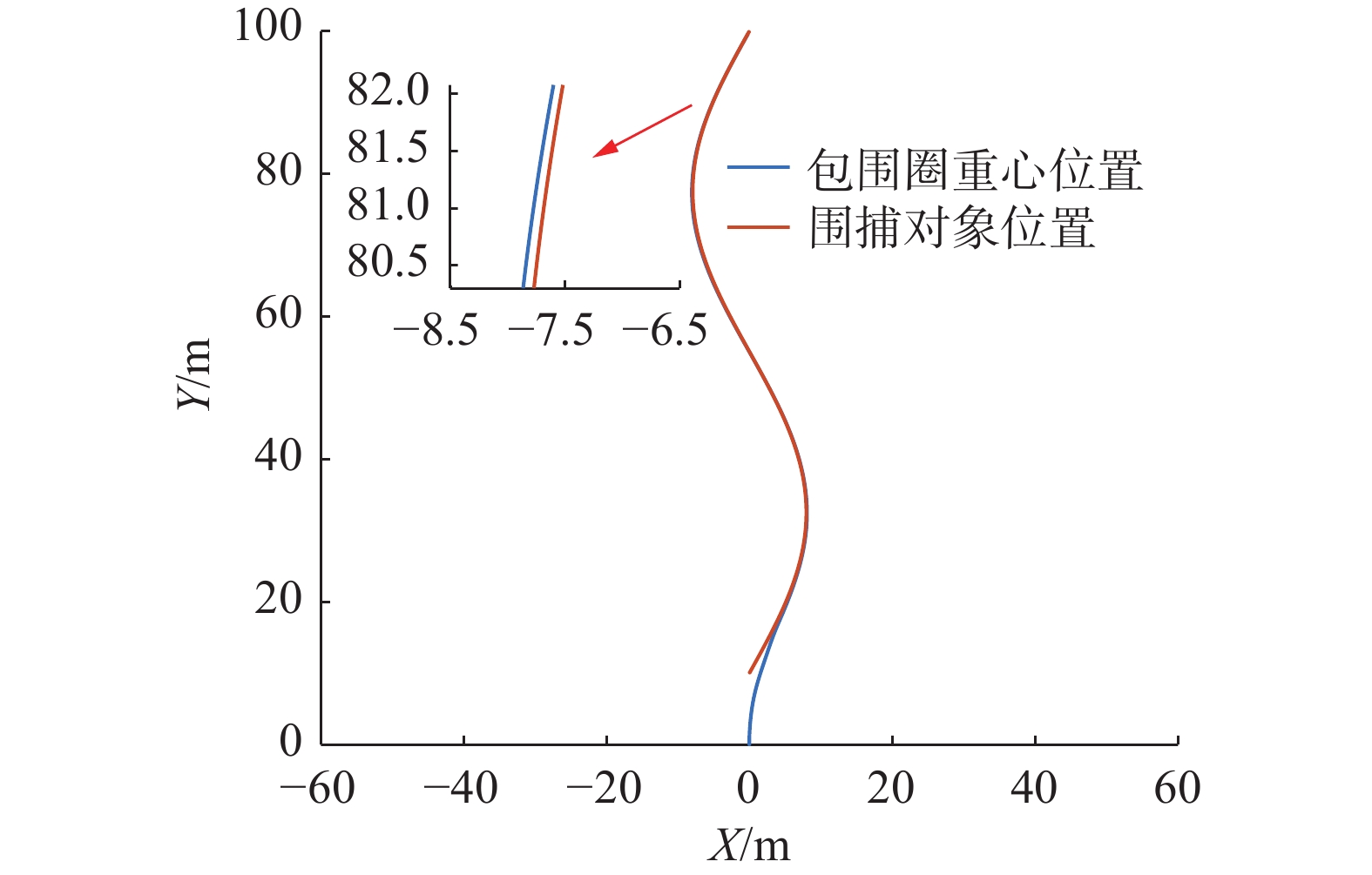 图 7 围捕区域中心位置与目标位置关系Fig. 7 Positional relationship between the center of the surrounding area and the target下载:
全尺寸图片
图 7 围捕区域中心位置与目标位置关系Fig. 7 Positional relationship between the center of the surrounding area and the target下载:
全尺寸图片
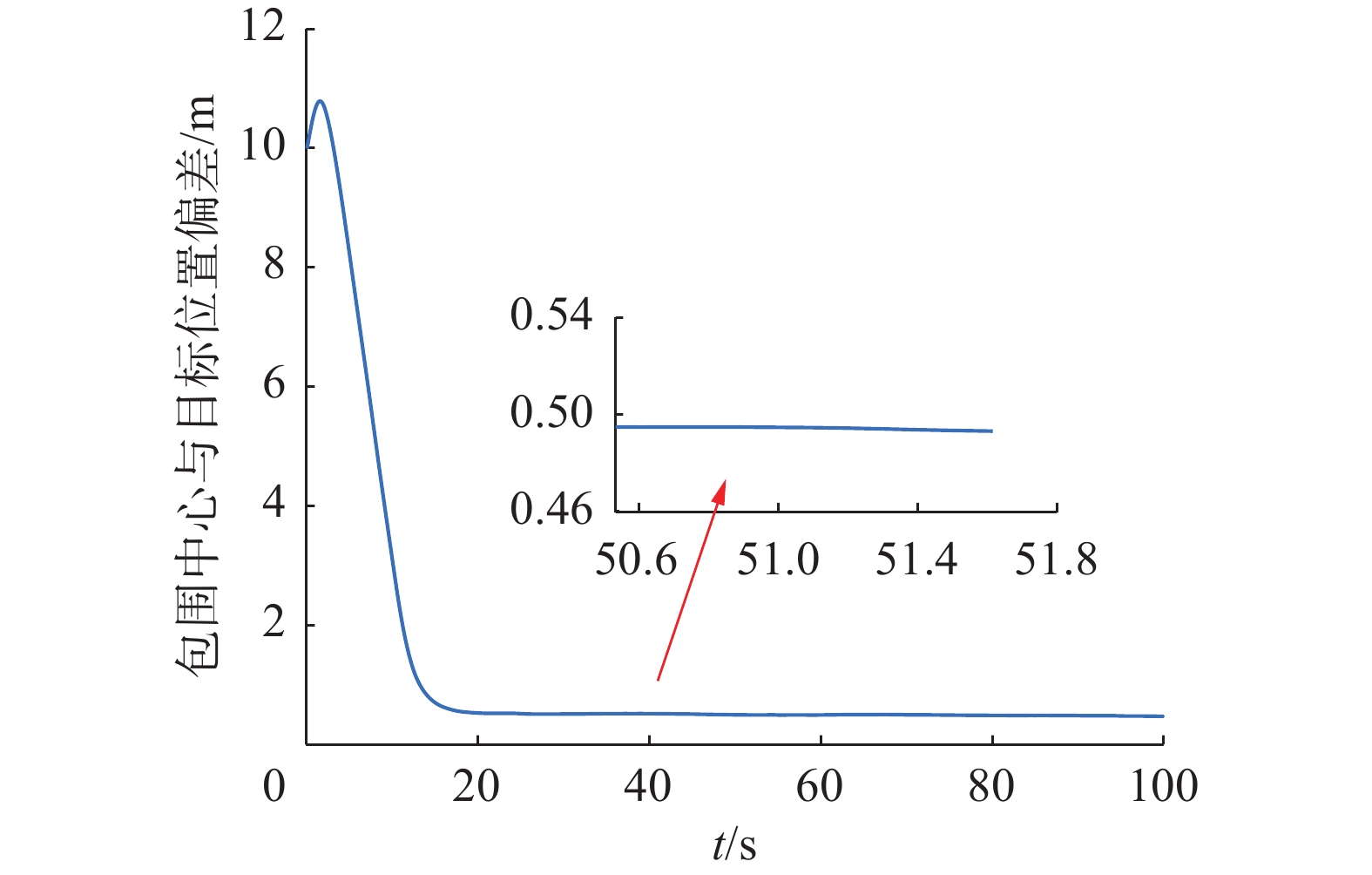 图 8 围捕区域中心到目标的距离Fig. 8 Distance from the center of the surrounding area to the target下载:
全尺寸图片
图 8 围捕区域中心到目标的距离Fig. 8 Distance from the center of the surrounding area to the target下载:
全尺寸图片
图9、10所示为USV成员的左、右舷推进器转速随时间的变化过程,观察到围捕过程中两个推进器的转速均满足
$ {\tau _{{\text{max}}}} = 300 $ r/s的限制,仿真过程中统计DNMPC最小化式(9)所需时间的平均值为0.016 s,因此可以满足算法实时性要求。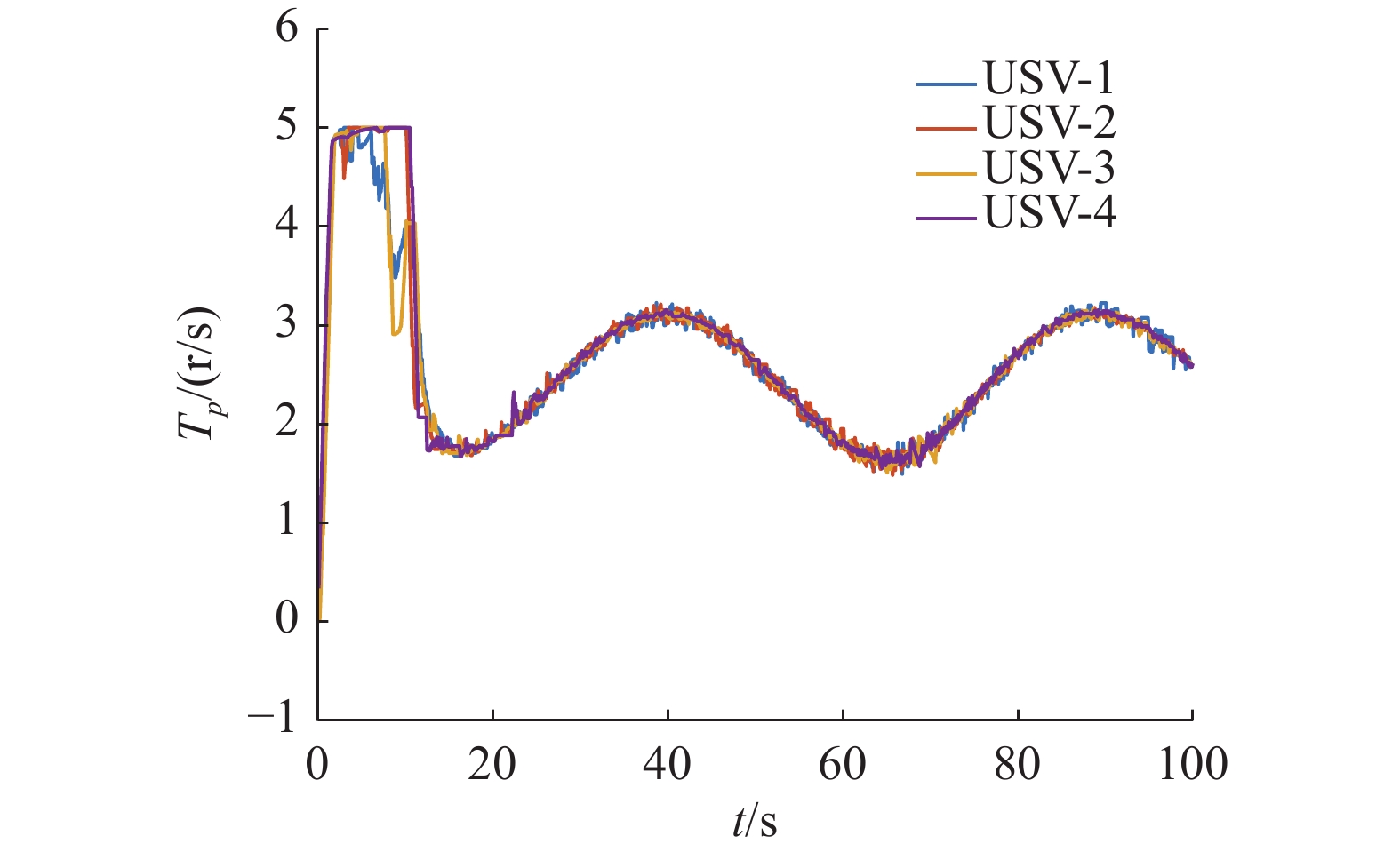 图 9 左舷推进器转速值Fig. 9 Rotary speed of port propeller下载:
全尺寸图片
图 9 左舷推进器转速值Fig. 9 Rotary speed of port propeller下载:
全尺寸图片
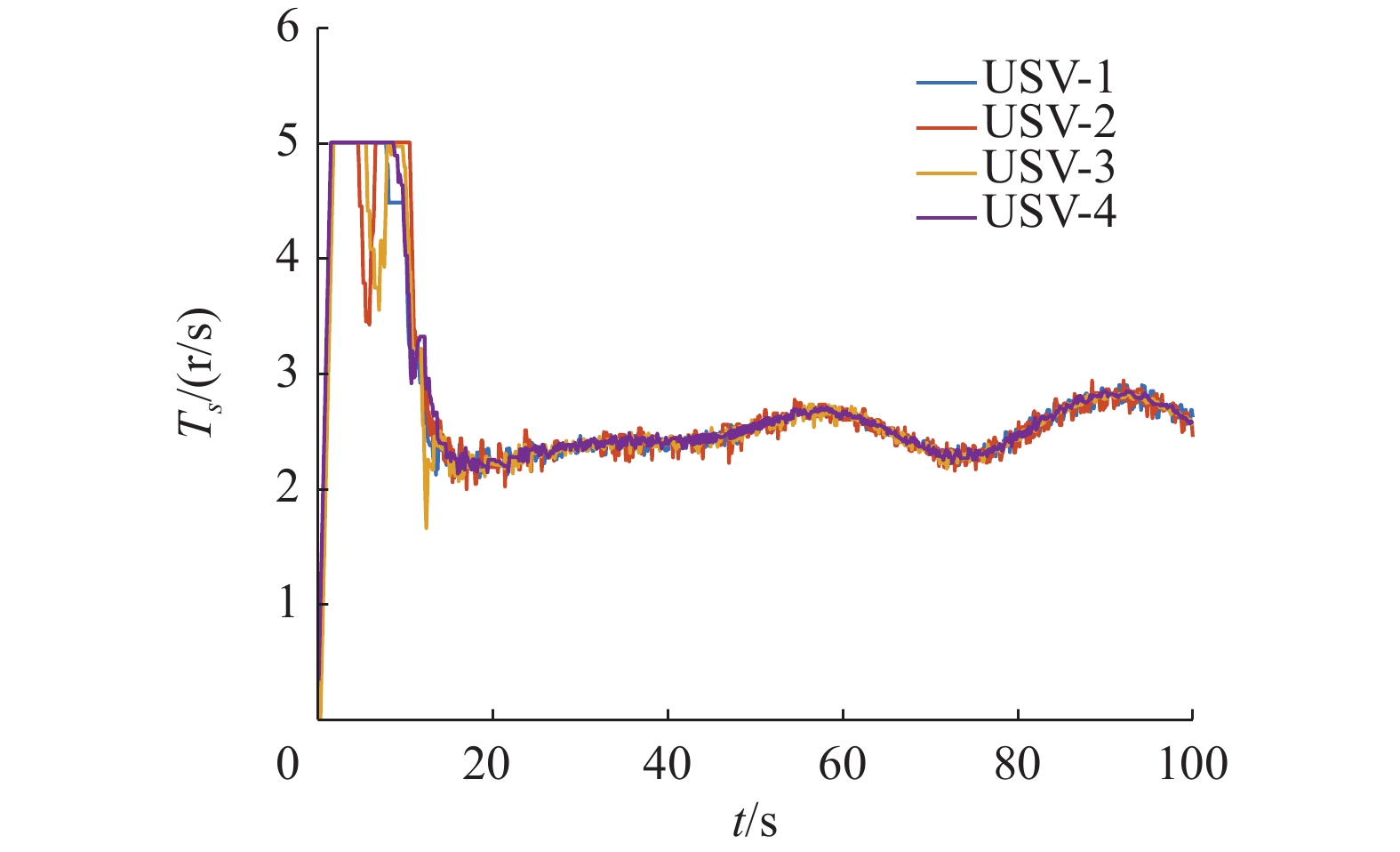 图 10 右舷推进器转速值Fig. 10 Rotary speed of starboard propeller下载:
全尺寸图片
图 10 右舷推进器转速值Fig. 10 Rotary speed of starboard propeller下载:
全尺寸图片
图11、12为DTSO的位置、速度观测误差,观察到DTSO误差在前10 s初始阶段内有界且快速衰减,随后完成对目标状态的一致性观测,尽管仅有USV-1与USV-2可直接获取目标信息,而编号为3与4的成员对目标的状态观测未受影响。
 图 11 分布式目标状态观测器位置观测误差Fig. 11 Position observation error of DTSO下载:
全尺寸图片
图 11 分布式目标状态观测器位置观测误差Fig. 11 Position observation error of DTSO下载:
全尺寸图片
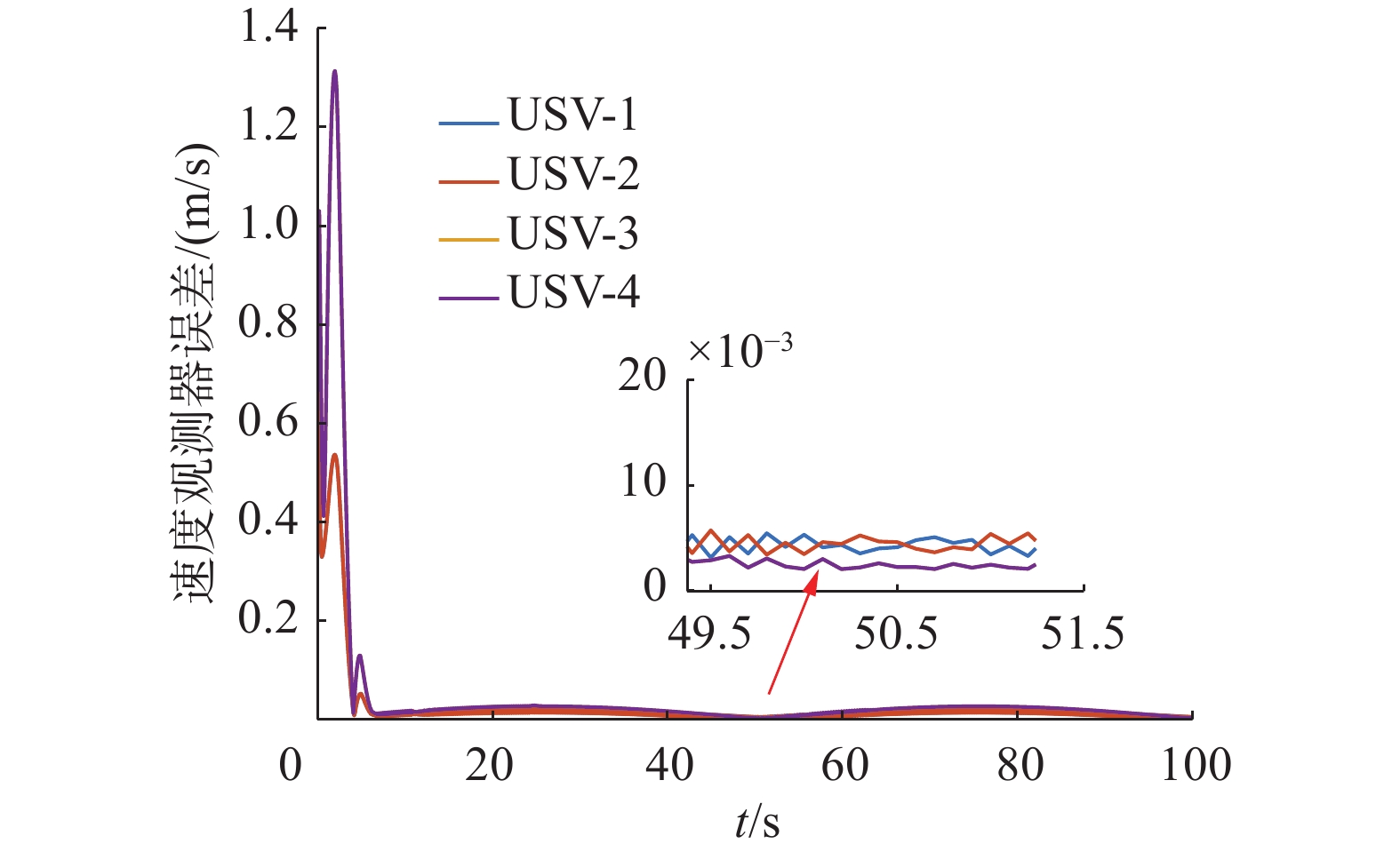 图 12 分布式目标状态观测器速度观测误差Fig. 12 Velocity observation error of DTSO下载:
全尺寸图片
图 12 分布式目标状态观测器速度观测误差Fig. 12 Velocity observation error of DTSO下载:
全尺寸图片
为验证协同围捕控制算法的自组织特性,在围捕过程中分别改变集群成员个数与初始位置参数并进行实验,如图13~15所示。由于第2节的分布式协同围捕算法参数均与USV的索引编号无关,且未显式指定各USV成员与目标的期望相对位置,因此图13中可以观察到,在不同的初始位置条件下,围捕状态稳定后各USV成员与目标的相对位置也互不相同。从图14、15可看出在围捕过程中减少、增加集群成员数量(USV-4离开或加入集群)后仍可以对目标自适应形成包围,在成员数量为4时构成矩形凸包,在成员数量为3时构成三角形凸包,因此证明了本算法的自组织性,能够根据当前成员数量自适应地形成对应的凸包形状。
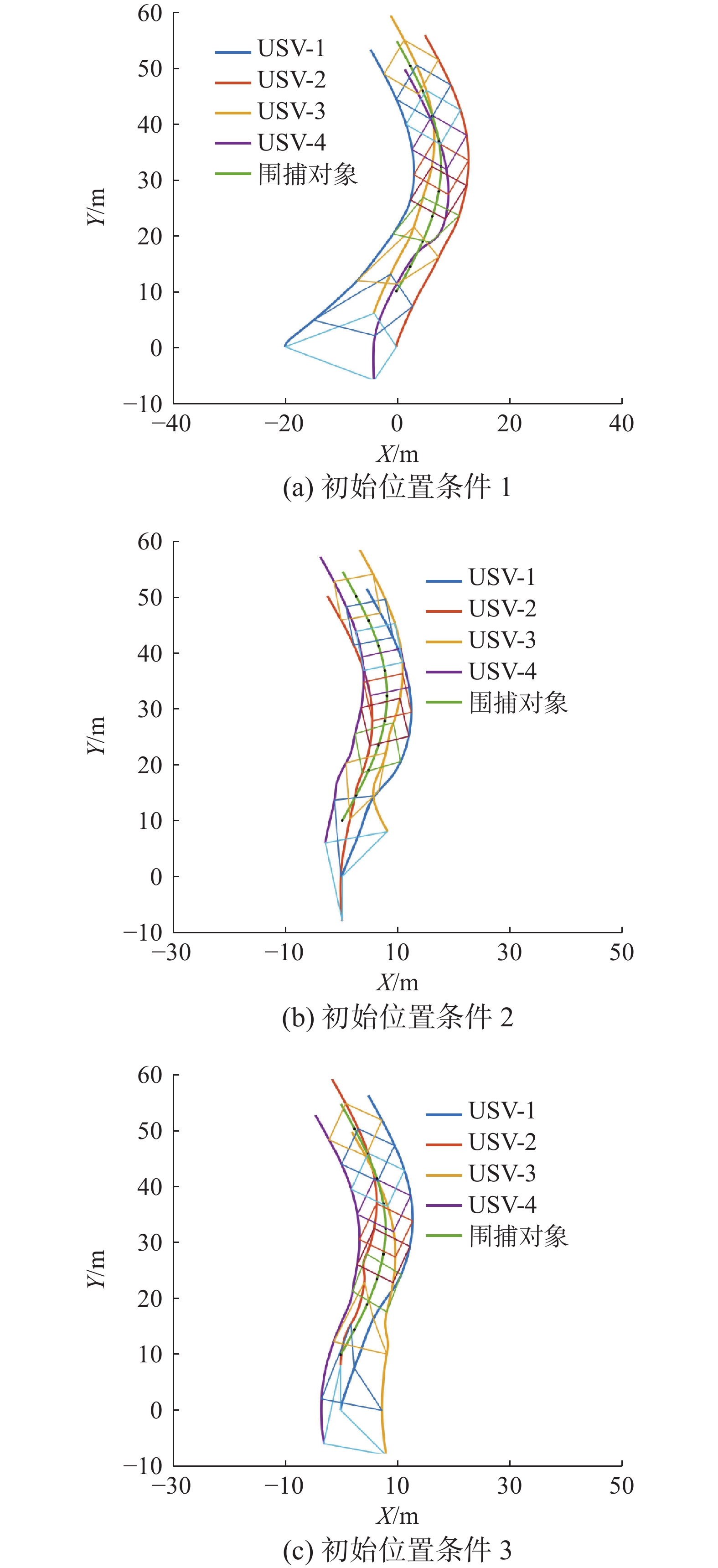 图 13 不同初始位置条件下的协同围捕过程Fig. 13 Collaborative surrounding process at different initial position conditions下载:
全尺寸图片
图 13 不同初始位置条件下的协同围捕过程Fig. 13 Collaborative surrounding process at different initial position conditions下载:
全尺寸图片
3.3 算法对比分析
对比分析1 将本文算法与文献[31]中的协同围捕控制算法进行对比。文献[31]针对一阶积分器运动模型和匀速运动目标设计了围捕控制算法,但在应用于无人艇时存在局限性。图16给出了使用该算法时的无人艇协同围捕过程,可以观察到,任务过程中仍可能出现无人艇间的碰撞情况,这是因为存在欠驱动特性等限制。相比于该算法,本文设计的围捕控制算法具有清晰的层次结构,并考虑了无人艇的三自由度运动模型,通过结合DNMPC处理了艇间距离约束和执行器饱和约束,于图6、9和图10均有体现,因此在应用可行性上具有优势。
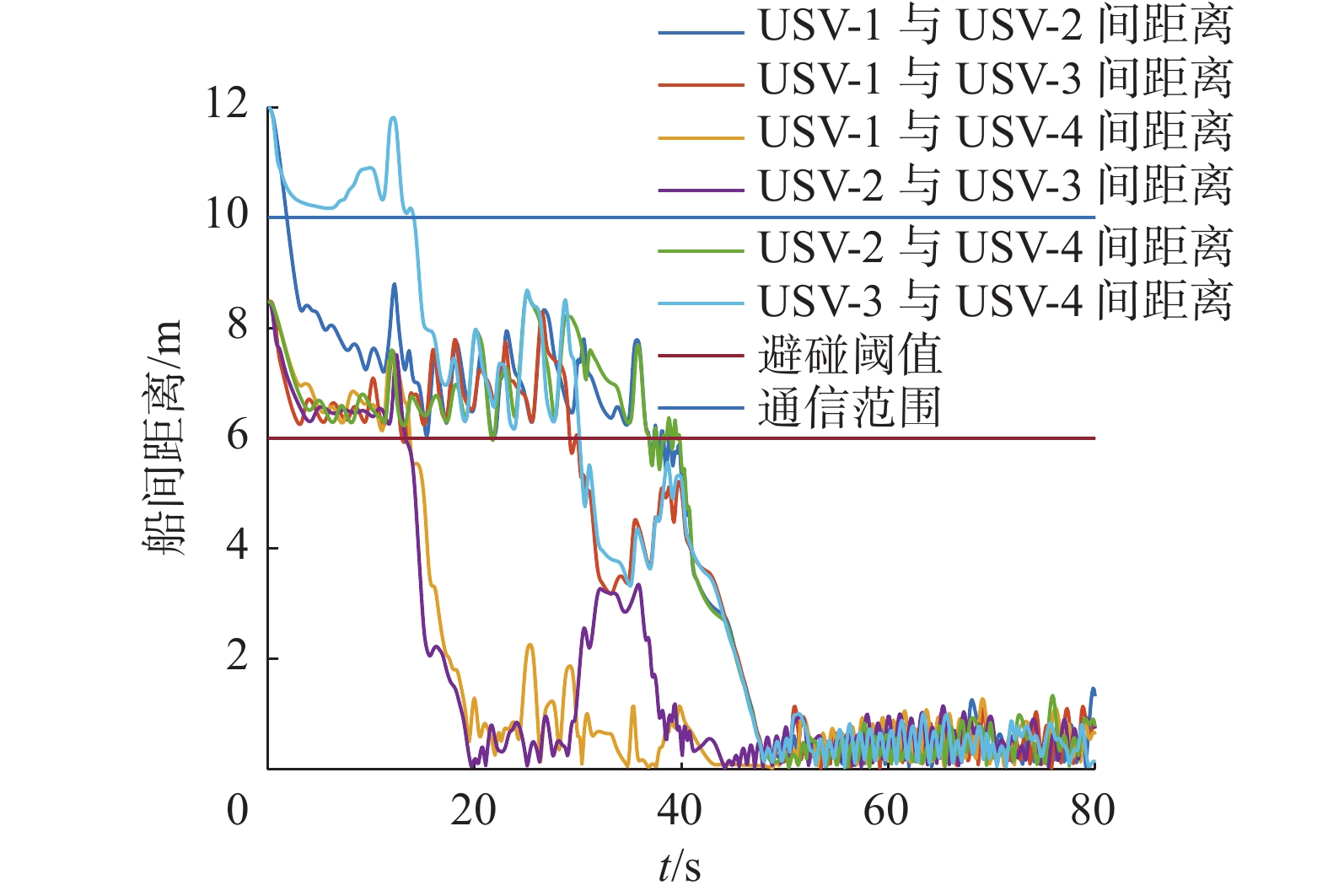 图 16 围捕过程中发生碰撞Fig. 16 Collision occurred during surrounding下载:
全尺寸图片
图 16 围捕过程中发生碰撞Fig. 16 Collision occurred during surrounding下载:
全尺寸图片
对比分析2 将本文算法与文献[20]中设计的控制算法进行对比。文献[20]基于无人艇三自由度运动模型设计算法,但并未考虑海洋环境干扰因素和执行器饱和约束,此外,其控制算法1中变量
$ {\delta _i} $ 的计算过程依赖于无人艇编号和艇间初始距离,并且该变量直接影响包围圈中各艇位置,对围捕中的成员数量变化存在局限性。因此相比于该算法,本文算法对集群成员变动具有自适应能力(如图13~15),更适用于实际海洋环境与任务需求。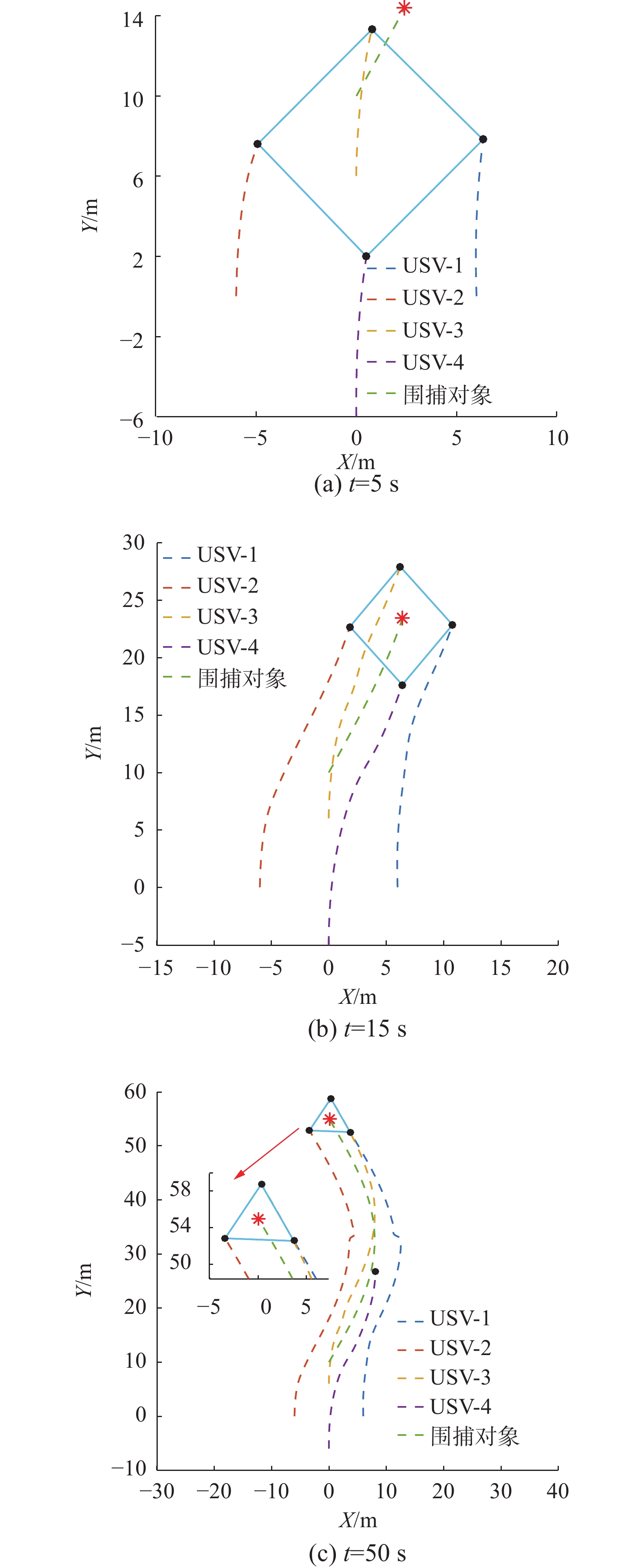 图 14 围捕过程中集群减少一个成员Fig. 14 Reduce the number of swarm members during the surrounding process下载:
全尺寸图片
图 14 围捕过程中集群减少一个成员Fig. 14 Reduce the number of swarm members during the surrounding process下载:
全尺寸图片
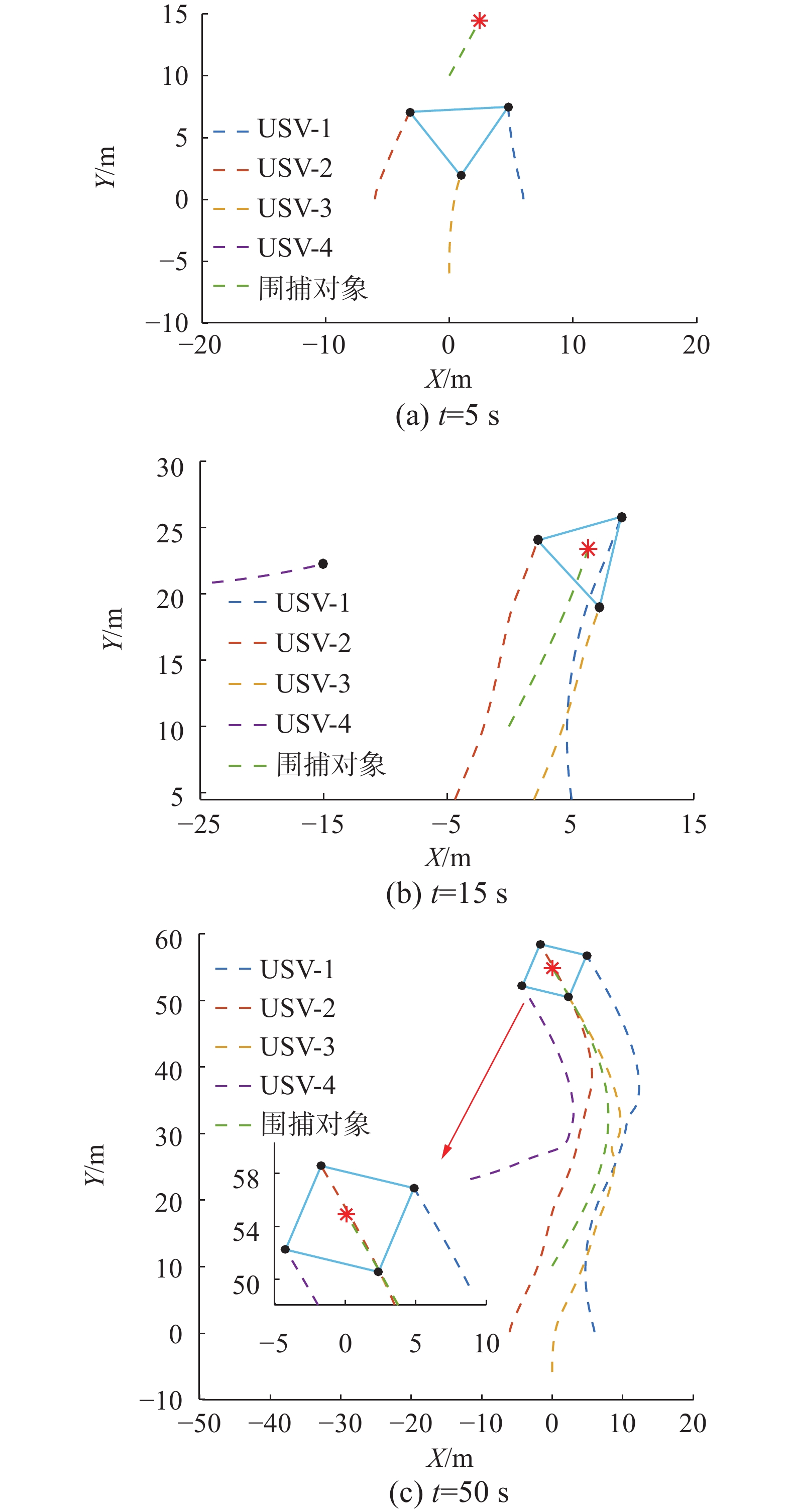 图 15 围捕过程中集群增加一个成员Fig. 15 Increase the number of swarm members during the surrounding process下载:
全尺寸图片
图 15 围捕过程中集群增加一个成员Fig. 15 Increase the number of swarm members during the surrounding process下载:
全尺寸图片
4. 结束语
本文设计了一种无人艇集群自组织协同围捕控制算法,通过由分布式围捕引导律、分布式目标状态观测器、分布式非线性模型预测控制器构成的级联系统实现对单个目标的协同围捕。自组织性体现在算法中的设计参数与无人艇在集群中的索引编号无关,且无需预先指定成员与被围目标的期望相对位置。Lyapunov稳定性分析与多次仿真实验结果表明,所提出的协同围捕控制算法可以在具有执行器饱和约束与避碰约束的情况下,对变速目标实现有效包围;在集群发生增员或减员的情况下,算法能够根据当前成员数量自适应地形成对应的凸包形状,以实现自组织围捕控制任务。
本文着重于研究无人艇集群进行协同围捕任务时的自组织控制算法,在面对集群内部的通信干扰和目标观测误差时存在一定的局限性。后续工作将考虑更加实际的应用场景,例如对存在通信延迟和目标观测值扰动等问题下的围捕任务开展研究。
-
图 1 将目标围于凸包内
Fig. 1 Surround the target within a convex hull
下载:
全尺寸图片
图 2 围捕控制算法结构
Fig. 2 Framework of surrounding control algorithm
下载:
全尺寸图片
图 3 基于航向角坐标系的USV运动学模型
Fig. 3 USV kinematic model based on heading frame
下载:
全尺寸图片
图 4 无人艇集群协同围捕过程
Fig. 4 Collaborative surrounding process of USV swarm
下载:
全尺寸图片
图 5 协同围捕中的凸包形状
Fig. 5 Convex hull shapes of collaborative surrounding
下载:
全尺寸图片
图 6 无人艇集群成员间距离与阈值
Fig. 6 Distance and threshold between USV swarm members
下载:
全尺寸图片
图 7 围捕区域中心位置与目标位置关系
Fig. 7 Positional relationship between the center of the surrounding area and the target
下载:
全尺寸图片
图 8 围捕区域中心到目标的距离
Fig. 8 Distance from the center of the surrounding area to the target
下载:
全尺寸图片
图 9 左舷推进器转速值
Fig. 9 Rotary speed of port propeller
下载:
全尺寸图片
图 10 右舷推进器转速值
Fig. 10 Rotary speed of starboard propeller
下载:
全尺寸图片
图 11 分布式目标状态观测器位置观测误差
Fig. 11 Position observation error of DTSO
下载:
全尺寸图片
图 12 分布式目标状态观测器速度观测误差
Fig. 12 Velocity observation error of DTSO
下载:
全尺寸图片
图 13 不同初始位置条件下的协同围捕过程
Fig. 13 Collaborative surrounding process at different initial position conditions
下载:
全尺寸图片
图 16 围捕过程中发生碰撞
Fig. 16 Collision occurred during surrounding
下载:
全尺寸图片
图 14 围捕过程中集群减少一个成员
Fig. 14 Reduce the number of swarm members during the surrounding process
下载:
全尺寸图片
图 15 围捕过程中集群增加一个成员
Fig. 15 Increase the number of swarm members during the surrounding process
下载:
全尺寸图片
-
[1] 王朝飞, 王慎执, 宋士吉, 等. 面向海域巡逻的多无人船路径规划方法及仿真[J]. 中国图象图形学报, 2023, 28(8): 2536−2548. doi: 10.11834/jig.220287 WANG Chaofei, WANG Shenzhi, SONG Shiji, et al. Multiple unmanned surface vehicles-based path planning method for sea patrol[J]. Journal of image and graphics, 2023, 28(8): 2536−2548. doi: 10.11834/jig.220287 [2] 马俊达, 谭冲, 刘可. 欠驱动无人船非奇异固定时间鲁棒包容控制[J]. 控制与决策, 2023, 38(5): 1286−1294. MA Junda, TAN Chong, LIU Ke. Nonsingular fixed-time robust containment control for underactued unmanned surface vehicle[J]. Control and decision, 2023, 38(5): 1286−1294. [3] 吴伟, 王宁, 王元元, 等. 多特征融合的无人船视觉目标跟踪[J]. 大连海事大学学报, 2023, 49(4): 37−45, 56. WU Wei, WANG Ning, WANG Yuanyuan, et al. Multi-feature fusion-based visual target tracking for unmanned surface vehicles[J]. Journal of Dalian Maritime University, 2023, 49(4): 37−45, 56. [4] 蒲进菁, 刘涵, 江云华, 等. 无人船现状及发展趋势综述[J]. 海洋信息, 2020, 35(1): 6−11. PU Jinjing, LIU Han, JIANG Yunhua, et al. Summary of the status and development trends of unmanned surface vehicle[J]. Marine information, 2020, 35(1): 6−11. [5] 普东东, 欧阳永忠, 马晓宇. 无人船监测与测量技术进展[J]. 海洋测绘, 2021, 41(1): 8−12,16. doi: 10.3969/j.issn.1671-3044.2021.01.002 PU Dongdong, OUYANG Yongzhong, MA Xiaoyu. Progress in monitoring and measurement technology of unmanned surface vehicles[J]. Hydrographic surveying and charting, 2021, 41(1): 8−12,16. doi: 10.3969/j.issn.1671-3044.2021.01.002 [6] 冯炜, 崔东华, 夏天冰, 等. 国外无人船集群运用特点分析及其应对启示[J]. 中国舰船研究, 2023, 18(1): 1−12. FENG Wei, CUI Donghua, XIA Tianbing, et al. Analysis of characteristics of foreign unmanned surface vehicle swarm combat application and proposed countermeasures[J]. Chinese journal of ship research, 2023, 18(1): 1−12. [7] LI Xianwei, TANG Yang, KARIMI H R. Consensus of multi-agent systems via fully distributed event-triggered control[J]. Automatica, 2020, 116: 108898. doi: 10.1016/j.automatica.2020.108898 [8] ZHANG Kaiqing, YANG Zhuoran, BAŞAR T. Multi-agent reinforcement learning: a selective overview of theories and algorithms[M]//Studies in Systems, Decision and Control. Cham: Springer International Publishing, 2021: 321−384. [9] YAO Deyin, LI Hongyi, LU Renquan, et al. Distributed sliding-mode tracking control of second-order nonlinear multiagent systems: an event-triggered approach[J]. IEEE transactions on cybernetics, 2020, 50(9): 3892−3902. doi: 10.1109/TCYB.2019.2963087 [10] 彭周华, 吴文涛, 王丹, 等. 多无人艇集群协同控制研究进展与未来趋势[J]. 中国舰船研究, 2021, 16(1): 51−64, 82. PENG Zhouhua, WU Wentao, WANG Dan, et al. Coordinated control of multiple unmanned surface vehicles: recent advances and future trends[J]. Chinese journal of ship research, 2021, 16(1): 51−64, 82. [11] 宋大雷, 干文浩, 许嘤枝, 等. 无人船实时路径规划与编队控制仿真研究[J]. 系统仿真学报, 2023, 35(5): 957−970. SONG Dalei, GAN Wenhao, XU Yingzhi, et al. Simulation of real-time path planning and formation control for unmanned surface vessel[J]. Journal of system simulation, 2023, 35(5): 957−970. [12] 胡涛. 基于无人艇编队的落海人员协同搜寻[D]. 武汉: 武汉理工大学, 2022: 3−10. HU Tao. Multi-MASS cooperative search for man overboard[D]. Wuhan: Wuhan University of Technology, 2022: 3−10. [13] 王洛泽. 多无人艇对目标的动态围捕方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019: 7−13. WANG Luoze. Research on target dynamic hunting method for Multi-USV[D]. Harbin: Harbin Engineering University, 2019: 7−13. [14] 宋利飞, 徐凯凯, 史晓骞, 等. 多无人艇协同围捕智能逃跑目标方法研究[J]. 中国舰船研究, 2023, 18(1): 52−59. SONG Lifei, XU Kaikai, SHI Xiaoqian, et al. Multiple USV cooperative algorithm method for hunting intelligent escaped targets[J]. Chinese journal of ship research, 2023, 18(1): 52−59. [15] 刘菁, 华翔, 张金金. 一种改进博弈学习的无人机集群协同围捕方法[J]. 西安工业大学学报, 2023, 43(03): 277−286. LIU Qing, HUA Xiang, ZHANG Jinjin. Improved game learning method for UAV swarm cooperative hunting[J]. Journal of Xi’an Technological University, 2023, 43(03): 277−286. [16] 徐望宝, 孙明炎. 群机器人自组织围捕多个入侵者的链阵方法[J]. 控制理论与应用, 2023, 40(1): 94−102. doi: 10.7641/CTA.2021.10243 XU Wangbao, SUN Mingyan. A self-organized chain formation method for swarm robots to enclose multiple intruders[J]. Control theory & applications, 2023, 40(1): 94−102. doi: 10.7641/CTA.2021.10243 [17] 于江龙, 董希旺, 李清东, 等. 拦截机动目标的分布式协同围捕制导方法[J]. 航空学报, 2022, 43(9): 325817. doi: 10.7527/j.issn.1000-6893.2022.9.hkxb202209035 YU Jianglong, DONG Xiwang, LI Qingdong, et al. Distributed cooperative encirclement hunting guidance method for intercepting maneuvering target[J]. Acta aeronautica et astronautica sinica, 2022, 43(9): 325817. doi: 10.7527/j.issn.1000-6893.2022.9.hkxb202209035 [18] 刘琨. 多无人艇协同搜索与围捕方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2019: 10−16. LIU Kun. Research on cooperative searching and huntingmethod for multiple unmanned surface vehicles[D]. Harbin: Harbin Engineering University, 2019: 10−16. [19] SUN Zhiyuan, SUN Hanbing, LI Ping, et al. Cooperative strategy for pursuit-evasion problem with collision avoidance[J]. Ocean engineering, 2022, 266: 112742. doi: 10.1016/j.oceaneng.2022.112742 [20] HU Binbin, ZHANG Haitao, LIU Bin, et al. Distributed surrounding control of multiple unmanned surface vessels with varying interconnection topologies[J]. IEEE transactions on control systems technology, 2022, 30(1): 400−407. doi: 10.1109/TCST.2021.3057640 [21] QU Xiuqing, GAN Wenhao, SONG Dalei, et al. Pursuit-evasion game strategy of USV based on deep reinforcement learning in complex multi-obstacle environment[J]. Ocean engineering, 2023, 273: 114016. doi: 10.1016/j.oceaneng.2023.114016 [22] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: Wiley, 2011. [23] GONZALEZ-GARCIA A, CASTAÑEDA H. Guidance and control based on adaptive sliding mode strategy for a USV subject to uncertainties[J]. IEEE journal of oceanic engineering, 2021, 46(4): 1144−1154. doi: 10.1109/JOE.2021.3059210 [24] HU Binbin, ZHANG Haitao, SHI Yang. Cooperative label-free moving target fencing for second-order multi-agent systems with rigid formation[J]. Automatica, 2023, 148: 110788. doi: 10.1016/j.automatica.2022.110788 [25] LI Huanhuan, LIU Tengfei, JIANG Zhongping. A Lyapunov-based small-gain theorem for a network of finite-time input-to-state stable systems[J]. IEEE transactions on automatic control, 2024, 69(2): 1052−1059. doi: 10.1109/TAC.2023.3274880 [26] ZUO Zongyu. Nonsingular fixed-time consensus tracking for second-order multi-agent networks[J]. Automatica, 2015, 54: 305−309. doi: 10.1016/j.automatica.2015.01.021 [27] GONZALEZ-GARCIA A, COLLADO-GONZALEZ I, CUAN-URQUIZO R, et al. Path-following and LiDAR-based obstacle avoidance via NMPC for an autonomous surface vehicle[J]. Ocean engineering, 2022, 266: 112900. doi: 10.1016/j.oceaneng.2022.112900 [28] LYU Jixing, KAO Yonggui, WANG Changhong, et al. Fully predefined-time distributed observer design for second-order strict-feedback nonlinear systems[J]. International journal of robust and nonlinear control, 2023, 33(18): 11553−11567. doi: 10.1002/rnc.6946 [29] ANDERSSON J A E, GILLIS J, HORN G, et al. CasADi: a software framework for nonlinear optimization and optimal control[J]. Mathematical programming computation, 2019, 11(1): 139. [30] LU Yu, ZHANG Guoqing, SUN Zhijian, et al. Adaptive cooperative formation control of autonomous surface vessels with uncertain dynamics and external disturbances[J]. Ocean engineering, 2018, 167: 36−44. doi: 10.1016/j.oceaneng.2018.08.020 [31] KOU Liwei, CHEN Zhiyong, XIANG Ji. Cooperative fencing control of multiple vehicles for a moving target with an unknown velocity[J]. IEEE transactions on automatic control, 2022, 67(2): 1008−1015. doi: 10.1109/TAC.2021.3075320
























































































































































































































































