



2. 宝鸡石油机械有限责任公司
2. CNPC Baoji Oilfield Machinery Co., Ltd
0 引言
采油树作为水下生产系统的关键设备,是油气从地层到管路的一个生产控制装置。采油树安装在海底并进行采油作业,这种方式可以有效避免海面恶劣环境对安装作业的影响,但同时安装距离的增加也无疑给安装作业提出了挑战。油管挂作为水下采油树重要的承/控压设备[1],是采油树的核心部件,其结构和安装过程较其他部件相对复杂,而且安装失败会带来巨大的经济损失。考虑到这些因素的影响,有必要开展水下生产系统安装过程的风险评估。
目前,针对海上安装作业风险分析的相关研究极少,国内外针对海上设备安装的研究仅局限于一般性的下放工艺介绍[2-4]、安装工具设计的相关研究[5-6]以及下放过程中的相关力学分析[7],而针对安装过程中遇到的技术问题并没有深入研究。罗建梅等[8]首次采用传统故障树分析法对油管挂下放安装过程进行了风险分析,建立了油管挂安装失效事故树,并结合专家评价得到基本事件的失效概率。但该方法仅结合人的实际经验来描述零部件的故障概率,而且实际工程中系统的故障机理及事件间的联系往往具有不确定性,仅以传统与或门来描述事件间的联系,使其分析程度尚有不足,影响了结论的准确性。
考虑到上述问题,笔者提出了一种基于T-S模糊故障树分析方法,应用到油管挂安装作业风险分析中,分别引入模糊数和T-S模糊门来描述系统故障程度和故障事件间的联系,减少因人的实际经验获取故障概率而造成的分析主观性,弥补传统故障树分析的不足。最终将该方法应用到采油树系统安装作业过程实例分析中,验证了了该方法的有效性和适用性。
1 基本理论方法 1.1 T-S模糊故障树利用T-S门代替传统逻辑与或门,构造一种新的T-S模糊故障树。在新的故障树中,各基本事件的失效概率用模糊数替代。图 1为T-S模糊门故障树模型。其中x1、x2、x3为基本事件,门a和门b为T-S模糊门。

|
| 图 1 T-S模糊门故障树模型 Fig.1 T-S fuzzy gate fault tree |
1.2 模糊数
考虑到传统故障树在实际应用中各基本事件历史失效数据较少,笔者引入模糊逻辑,用模糊数来表示各基本事件故障概率,使故障树的建立不再依赖于大量的故障数据。在T-S模糊故障树中,通常用区间[0, 1]的模糊数来表示各故障程度。
采用图 2所示的梯形隶属函数μ(x)作为模糊数的隶属函数,其数学表达式为:

|
(1) |

|
| 图 2 模糊数的隶属函数 Fig.2 Membership function of fuzzy number |
式中:F0为模糊数支撑集的中心,s1和s2为支撑半径,m1和m2为模糊区。
1.3 T-S模糊门算法T-S模型由一系列IF-THEN模糊规则组成,是一种非线性模型,用来描述事件间的关联,从而构成T-S模糊门,其模型规则表述如下[9-10]:
已知规则l (l=1,2,……,m);如果x1为Fl1,x2为Fl2,依次类推,则y为yl。其中,x=(x1,x2,……,xn)为前件变量,Flj为模糊集,现设模糊集的隶属函数为μFlj(xj),则T-S模型的输出为:
|
(2) |
|
(3) |
|
(4) |
式中:βl*(x)为βl(x)的归一化数值,βl(x)为模糊规则l的执行度。
设基本事件x= (x1,x2,……,xn)和上级事件y的故障程度分别描述为模糊数(x11,x22,……,xnk1),……,(x11,x22,……,xnkn)和(y1,y2,……,yky),其中有:
|
(5) |
则T-S模糊门表述如下:
已知规则l(l=1,2,……,m);如果x1为x1i1,x2为x2i2,依此类推,则y为y1的可能性为Pl(y1),y为y2的可能性为Pl(y2),……,y为yky的可能性为Pl(yky)。其中:i1=1,2,……,k1; ……; in=1,2,……,kn。因此,规则总数m=
假设基本事件故障程度的模糊可能性为P(x1i1),……,P(xnin),则规则l(l=1,2,……,m)执行的可能性为:

|
(6) |
因此,上级事件的模糊可能性为:
|
(7) |
假设已知基本事件x=(x1,x2,……,xn)的故障程度为x′=(x1′,x2′,……,xn′),则由T-S模型可推算上级事件故障程度的模糊可能性为:
|
(8) |
其中

|
(9) |
式中:μxjij(x′j)为第l条规则中x′j对应模糊集的隶属度。
因此,以图 1为例,若已知基本事件x的模糊可能性和故障程度x′,结合T-S门各规则,可分别应用式(7) 和式(8) 估算出图 1中所有上级事件的模糊可能性。
2 油管挂安装作业模糊故障树分析 2.1 T-S模糊故障树当系统中各部件发生故障时,由于各部件发生故障的严重程度不同,导致各部件发生故障的可能性具有不确定性的特点。按照实际应用,T-S门将分别用模糊数0、0.5和1来描述系统各部件的故障程度,其中0表示部件无故障,0.5表示轻微故障,1表示部件不能正常工作。笔者以油管挂安装失效为例,建立T-S故障树,如图 3所示。图中各事件名称如表 1所示。

|
| 图 3 油管挂安装失效故障树 Fig.3 Failure fault tree of the tubing hanger installation |
| 中间事件 | 部件名称 |
| y1 | 液压系统失效 |
| y2 | 锁紧环结构卡死 |
| y3 | 海洋环境影响 |
| y4 | 人为因素影响 |
| y5 | 定位机构破坏 |
| y6 | 锁紧机构破坏 |
| y7 | 密封机构破坏 |
| y8 | 第三方破坏 |
| y9 | 油管挂设备故障 |
| y10 | 下入工具破坏 |
| y11 | 油管挂安装失效 |
| - | - |
根据图 3所示T-S模糊故障树,假设所有基本事件x1~x19和中间事件y1~y11的故障程度均为(0,0.5,1),隶属函数参数选取s1=s2=0.1,m1=m2=0.3,并根据历史数据和专家经验可得到各个T-S门规则,如表 2和表 3所示(由于篇幅限制,其他T-S门规则未给出)。
| 规则 | x9 | x10 | y1 | ||
| 0 | 0.5 | 1 | |||
| 1 | 0 | 0 | 1 | 0 | 0 |
| 2 | 0 | 0.5 | 0.2 | 0.4 | 0.4 |
| 3 | 0 | 1 | 0 | 0 | 1 |
| 4 | 0.5 | 0 | 0.2 | 0.5 | 0.3 |
| 5 | 0.5 | 0.5 | 0.1 | 0.3 | 0.6 |
| 6 | 0.5 | 1 | 0 | 0 | 1 |
| 7 | 1 | 0 | 0 | 0 | 1 |
| 8 | 1 | 0.5 | 0 | 0 | 1 |
| 9 | 1 | 1 | 0 | 0 | 1 |
| 规则 | x11 | x12 | x13 | y2 | ||
| 0 | 0.5 | 1 | ||||
| 1 | 0 | 0 | 0 | 1 | 0 | 0 |
| 2 | 0 | 0 | 0.5 | 0.3 | 0.5 | 0.2 |
| 3 | 0 | 0 | 1 | 0 | 0 | 1 |
| 4 | 0 | 0.5 | 0 | 0.1 | 0.4 | 0.5 |
| 5 | 0 | 0.5 | 0.5 | 0.1 | 0.3 | 0.6 |
| 6 | 0 | 0.5 | 1 | 0 | 0 | 1 |
| 7 | 0 | 1 | 0 | 0 | 0 | 1 |
| 8 | 0 | 1 | 0.5 | 0 | 0 | 1 |
| 9 | 0 | 1 | 1 | 0 | 0 | 1 |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 27 | 1 | 1 | 1 | 0 | 0 | 1 |
根据上述模糊逻辑以及结合T-S门规则算法,可以通过各基本事件的模糊可能性或故障程度计算出各上级事件故障的模糊可能性,进而估算出顶部事件的模糊可能性。
2.2 T-S模糊可能性分析笔者主要参考国外OREDA手册以及国内相关专家经验,汇总出失效概率数据,经模糊化处理为模糊子集,具体如表 4所示,且假定基本事件故障程度0.5和1的故障率模糊子集相同。
| 编号 | 部件名称 | 故障率(10-6) |
| x1 | 拖拽力过大 | {0.2,0.3,0.4} |
| x2 | 涡激/轴向振动 | {0.1,0.2,0.3} |
| x3 | 操作技术不熟练 | {12.0,15.0,18.0} |
| x4 | 专业知识水平不充分 | {10.0,13.0,16.0} |
| x5 | 作业船偏移过大 | {0.1,0.3,0.5} |
| x6 | 定向套筒变形 | {6.1,7.1,8.1} |
| x7 | 定向槽变形 | {4.3,4.8,5.3} |
| x8 | 导向键/导向槽为完全啮合 | {6.1,7.1,8.1} |
| x9 | 平台控制系统故障 | {2.2,2.4,2.6} |
| x10 | 液路阻塞 | {3.3,3.7,4.1} |
| x11 | 推动环变形 | {2.2,2.4,2.6} |
| x12 | 锁紧环变形 | {3.2,3.5,3.8} |
| x13 | 锁紧套筒变形 | {3.2,3.5,3.8} |
| x14 | 密封件损坏 | {0.7,0.8,0.9} |
| x15 | 密封处未完全啮合 | {6.1,7.1,8.1} |
| x16 | 密封面有异物 | {1.0,1.2,1.4} |
| x17 | 下入工具连接故障 | {2.7,3.9,5.1} |
| x18 | 下入工具卡死 | {0.2,0.3,0.4} |
| x19 | 下入工具与油管挂连接失误 | {0.1,0.3,0.5} |
根据表 2和表 3并利用式(7) 和式(8),得到所有上级事件(y系列)的模糊可能性,见表 5。
| 上级事件 | 模糊可能性(10-6) | |
| 0.5 | 1 | |
| y1 | [2.42,2.68,2.94] | [7.48,8.30,9.12] |
| y2 | [3.52,3.85,4.18] | [4.16,4.55,4.94] |
| y3 | [0.11,0.18,0.25] | [0.23,0.42,0.61] |
| y4 | [10.00,12.70,15.40] | [29.80,37.90,46.00] |
| y5 | [5.81,6.66,7.51] | [15.75,18.25,20.75] |
| y6 | [2.62,2.88,3.14] | [13.77,15.19,16.61] |
| y7 | [4.04,4.71,5.38] | [9.83,11.47,13.11] |
| y8 | [5.16,6.70,8.23] | [33.19,42.56,51.93] |
| y9 | [8.05,9.27,10.49] | [38.55,43.91,55.50] |
| y10 | [3.12,4.59,6.06] | [3.35,5.04,6.73] |
| y11 | [17.61,22.38,27.15] | [70.24,85.12,106.30] |
上述结果说明,顶部事件故障模糊可能性与各基本事件、中间事件的模糊可能性是同一数量级。且顶事件出现故障的可能性大于每个基本事件模糊可能性,这与实际情况一致。与文献[8]利用专家权重值来描述各基本事件故障概率所求得结果相比,T-S故障树得到的结果包含了文献[8]中的结果,不仅验证了T-S故障树分析方法的可行性;同时,可将传统故障树的布尔逻辑门看作是T-S故障树中T-S门的特例。因此,与文献[8]相比,笔者的方法更具一般性,所得结论更为合理。
2.3 T-S模糊概率分析统计基本事件的故障概率,有时是已知其确定的概率,有时则是由模糊理论和专家系统相结合的方法计算得到。对于后者可利用相关理论算法,计算各基本事件的模糊可能性[11-13]。假设已知各基本事件的故障程度x7、x9、x11、x17为0.1,x8、x10、x12、x13为0.2,x3、x4、x6、x15为0.3,其他均为0,以此计算系统故障的模糊可能性。
以T-S门2为例,通过计算得到各规则基本事件故障程度的隶属度,结果如表 6所示。
因此,由式(3) 得到β1*=4/9,β2*=2/9,β3*=2/9,β4*=1/9,其他均为0,再根据式(8) 可得:
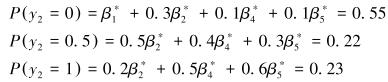
|
同样道理,可以计算求得P(y1=0) =0.74,P(y1)=0.5 =0.13,P(y1)=1 =0.13。可见,当推动环、锁紧环与锁紧套筒三者出现轻微故障时,锁紧环系统发生卡死的情况同样是属于微小故障的程度,出现失效故障的概率相对较小,与实际情况相符。
结合T-S门6规则并利用式(7) 得到y1和y2的上级事件y6的故障概率为:

|
由此可计算得到顶部事件y11的故障概率为:

|
由此可见,当油管挂安装作业时多个关键部件(锁紧机构、定位机构和密封机构)同时发生轻微故障时,系统发生故障程度的模糊可能性较大。因此,在实际的安装操作中,若多个部件同时出现故障问题,应引起足够的重视。
3 结论(1) 将模糊逻辑、T-S模型与传统故障树相融合,提出了一种基于T-S模糊故障树的油管挂安装作业风险分析方法。该方法有效地克服了传统故障树分析时存在的失效概率获取困难、事件间联系的不确定性以及不能描述系统故障程度这3方面的问题。
(2) 与传统故障树模型评估方法相比,该方法能够有效发挥模糊逻辑推理的优势,从而解决了系统故障机理的不确定性问题,降低了建树的难度;同时又充分结合专家经验和历史数据的T-S门更接近实际系统情况,从而大大提高了分析过程的准确性与可靠性。
(3) 结合油管挂安装失效T-S模糊故障树分析实例,求解顶事件发生故障和出现各种故障程度的模糊可能性,进一步验证了该方法的可行性和准确性。研究结果为油管挂系统制定安装方案时有效采取相应措施以降低安装过程中的风险提供了依据。
| [1] | 唐彪, 段梦兰, 戴兵, 等. 内压作用卧式采油树油管挂承载能力研究[J]. 石油机械, 2014, 42(3): 43–47. |
| [2] | DENNY D. Subsea-hardware installation from an FDPSO[R]. SPE-0810-0060-JPT, 2010. |
| [3] | YAN W, CHEN Z J, DENG J G, et al. Numerical method for subsea wellhead stability analysis in deepwater drilling[J]. Ocean Engineering, 2015, 98: 50–56. DOI: 10.1016/j.oceaneng.2015.02.007 |
| [4] | 张亮, 张玺亮, 孙子刚, 等. 深水油田立式水下采油树安装操控作业[J]. 石油钻采工艺, 2012, 34. DOI: 10.3969/j.issn.1000-7393.2012.03.004 |
| [5] | 姜立杰. 卧式采油树油管挂设计研究[D]. 青岛: 中国石油大学(华东), 2011. |
| [6] | 罗晓兰, 秦蕊, 康有田, 等. 电潜泵式水下采油树油管挂工程设计方法研究[J]. 中国海洋平台, 2013, 28(3): 10–14. |
| [7] | 林秀娟, 肖文生, 王鸿雁. 深水采油树下放过程钻柱力学分析[J]. 中国石油大学学报(自然科学版), 2011, 35(5): 125–129. |
| [8] | 罗建梅, 段礼祥, 段梦兰, 等. 基于模糊FTA水下采油树油管挂安装风险分析[J]. 石油机械, 2015, 43(7): 51–55. |
| [9] | 宋华, 张洪钺, 王行仁. T-S模糊故障树分析方法[J]. 控制与决策, 2005, 20(8): 854–859. |
| [10] | 姚成玉, 赵静一. 液压系统模糊故障树分析方法研究[J]. 中国机械工程, 2007, 18(14): 1656–1659. DOI: 10.3321/j.issn:1004-132X.2007.14.005 |
| [11] | 司景萍, 马继昌, 牛家骅, 等. 基于模糊神经网络的智能故障诊断专家系统[J]. 振动与冲击, 2017, 36(4): 164–171. |
| [12] | DONG Y, YU D. Estimation of failure probability of oil and gas transmission pipelines by fuzzy fault tree analysis[J]. Journal of Loss Prevention in the Process Industries, 2005, 18(2): 83–88. DOI: 10.1016/j.jlp.2004.12.003 |
| [13] | 段杰, 王秀丽, 侯雨伸, 等. 基于模糊专家系统的输电线路分段冰风荷载等效停运率模型[J]. 电工技术学报, 2016, 31(8): 220–228. |