




0 引 言
管道运输具有一次性投资少、运输成本低、安全性高以及利于环保等独特优势,尤其适合长距离运输易燃、易爆的石油天然气[1]。但随着管道服役年限的积累,管道容易发生腐蚀、破损甚至泄漏等现象,如不及时更换问题管道,将会严重影响管道的正常运营,甚至威胁到铺设管道地区周围居民的生命安全。为满足安全快速的管道维修技术需求,不少企业和研究机构着力引进国外已经较成熟的管内智能封堵技术[2],并在此基础上进行创新,对封堵器各部件进行优化[3, 4],以求达到最佳的工作性能。还有学者对管内封堵器工作过程中流场的变化进行深入研究,结果发现封堵器的外形结构会造成其周围流场的紊乱[5]。
笔者在现有研究基础上利用数值模拟方法对附加曲形端面结构封堵器模型进行了流场分析,采用正交试验法设计试验方案,建立数学模型,运用序列二次规划算法对设定的目标函数进行优化,寻求最优参数组合。所得研究结果对封堵器结构外形的设计优化具有指导意义。
1 封堵器结构和工作原理 1.1 结构管内智能封堵器为管内智能封堵系统的核心模块,主要由弹簧支撑轮、承压头、密封圈、推力杆、承压斜块和锚爪等组成,其结构如图 1所示。

|
| 图 1 管内封堵器机械结构 Fig. 1 Mechanical structure of plugging tool 1—支撑轮;2—楔形承压块;3—推力杆;4—锚爪;5—密封圈。 |
实际工作中,封堵器由前、后压差推动到达指定封堵位置后,经通信模块传送极低频无线电波进行远程控制,驱动系统驱动推力杆,从而带动锚爪结构沿楔形承压块外表面运动,其直径增大,直到其齿牙嵌入管内壁使封堵器锁紧。由于楔形承压块挤压密封圈,使密封圈在轴向宽度缩短,径向长度增加,与管道内壁达到过盈配合,保证了密封性,避免流体介质的通过和作业过程中流体介质的泄漏,从而实现管内封堵[6]。
2 封堵器流场数值模拟数值模拟所用的封堵器模型参考 ø610 mm管道进行封堵作业所用管内封堵器外部结构尺寸建立,并进行适当改进和简化。实际的管内封堵器通常与多个功能模块一起协同工作,如清管模块和锚定模块等,彼此之间用连接杆和球轴承连接,导致其端面中心一般会有用于连接其他工具的连接槽。模拟条件参考实际工况,管道长度L=10 m,封堵器外形如图 2所示,其中形状参量Sp是衡量曲面类型和曲度的参数,其值与圆锥曲线的离心率e有关。当0.01≤Sp<0.50时,为椭圆曲面:当Sp=0.50时,为抛物线曲面;当0.50<Sp≤0.99时,为双叶双曲线曲面。其他参数尺寸详见表 1。

|
| 图 2 封堵器模型 Fig. 2 Plugging tool model |
| 参数 | d1 | d | L1 | h | r | s | Sp |
| 数值 | 38.88 | 48 | 92 | 12 | 8 | 24 | 0.01 |
利用Gambit软件建立封堵器机械结构网格模型,封堵器与管的中心位于坐标原点,管内流体的流动方向为z方向。由于模型外形结构复杂,采用Tet/Hybrid单元和TGrid相结合的方法对模型进行网格划分,以提高计算精度并节省计算量。网格模型(见图 3)单元体个数、几何面数和节点数分别为641 264、1 311 017和121 475,导出mesh文件。在Fluent中设置控制方程,因为此模型未涉及温度,所以只需满足质量守恒方程及动量守恒方程[7]。

|
| 图 3 封堵器网格模型 Fig. 3 Mesh of the plugging tool model |
质量守恒定律可表述为在同一时间内流入的体积流量和流出的体积流量相等,即:

动量守恒定律可表述为作用在单位质量流体上的质量力、表面力和惯性力相平衡,即:
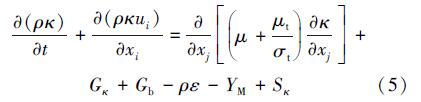
选择Fluent 3d三维单精度隐式压力求解器。由于流场内雷诺数较高,将该流场视为非稳态流动进行数值模拟。梯度插值选择基于节点的格林-高斯格式,使求解更精确,最小化伪扩散。压力-速度耦合采用Simple算法,空间离散应用二阶迎风格式,适用于四面体网格或流动与网格不在同一直线上的情况,各松弛因子保持默认值。为使流场更符合实际流动情况,湍流模型选用Realizable κ-ε湍流模型,此模型在Standard κ-ε模型的基础上进行改进,采用了新的湍流黏度公式,该模型满足对雷诺应力的约束条件,可以在雷诺应力上保持与真实湍流的一致,这一点其他湍流模型都无法做到,并且它能够更加准确地预测平板射流的发散率,对于旋转流、边界层流、流动分离及复杂的二相流都能取得很好的效果。
在Realizable κ-ε湍流模型中,关于κ和ε的输送方程如下:
本次模拟以纯液态汽油作为流体介质,该汽油的物理性质为:密度830 kg/m3,黏度系数为0.332 mPa·s。汽油属于黏性流体,因此需在管壁内表面设置边界层。操作压力为5 MPa,考虑重力场影响,重力方向沿Y轴负向。模型入口为速度入口,流速设置为3 m/s。以入口速度计算管内流体雷诺数约为4.575×105,其湍流强度为3.1%,水力直径为61 cm。为了提高计算收敛性,出口边界条件选为自由出流边界。封堵器表面和管壁都设置为无滑移的壁面边界。迭代过程中将管内z=±100 cm平面的绝对压力的平均值作为观测量,如果其数值长时间处于平衡状态,说明管内流场基本趋于稳定,则可终止迭代计算。
3 数值模拟结果及分析因为模型轴对称,所以取对称面(x=0的平面)来研究管内流场状态较为直观。图 4为管内流场绝对压力云图。由图可知,封堵器前、后端面压差较大,这是封堵器能在管内运动的动力来源。封堵器头部的连接槽位置出现局部高压,在封堵器和管内壁之间的狭长缝隙内的流体压力变化相对较为剧烈,对管壁存在一定冲击。整体来看,封堵器周围流场自上游至下游的压力分布呈明显区域化,且径向对称,有利于封堵器在管内平稳输送。低压区主要集中在封堵器尾部附近流场,主要由于该位置流域面积变化大,流动状态复杂,伴随产生回流和漩涡,导致大量能量损失。

|
| 图 4 管内流场绝对压力云图 Fig. 4 Contours of absolute pressure of flow field in the pipe |
图 5为管内流场的速度云图。由图可知,在封堵器上游流场流动平稳,流速基本与入口流速保持一致,在靠近封堵器前端面连接槽附近流体流速几乎为0,主要是连接槽结构对该区域流体的阻隔作用,使其动能损耗殆尽。当流体经过封堵器与内壁之间的狭小空间时其速度有显著增加,出现速度峰值,其原因是流域面积的变小,上游流体积压,高压作用使流体加速。而通过狭缝后,由于流道变得开阔,与突然扩张喷管的流动原理类似,速度呈现减速趋势,并且封堵器尾部流体有明显回流现象,导致该区域速度较低且出现驻点,对封堵器的前行造成一定阻力,同时发现封堵器尾部的流速等值面呈锥形,与后端面的外形轮廓相似。

|
| 图 5 管内流场速度云图 Fig. 5 Contours of velocity in the pipe |
通过对管内流场压力和速度分布的分析,发现其变化规律与封堵器端面结构密切相关,因此可通过优化封堵器端面的尺寸参数来获取最有利于其在管内运动的外形结构。
4.1 设计正交试验组针对管内封堵器曲形端面结构的优化问题,选取曲面的厚度s、形状参数Sp、连接槽的半径r及其底部高度h作为设计变量,对封堵器结构进行优化,各设计变量的范围如表 2所示。模型建立和边界条件设定同上,待迭代计算终止后,提取上中下游不同位置共12个平面的绝对压力平均值,其坐标如表 3所示。求得相邻点之间的压力梯度值 ,并以各位置压力梯度的绝对平均值作为响应量来衡量流场整体的稳定性。
,并以各位置压力梯度的绝对平均值作为响应量来衡量流场整体的稳定性。
| 设计变量 | 范围 |
| s/cm | 14~24 |
| h/cm | 2~12 |
| r/cm | 2~8 |
| Sp | 0.01~0.99 |
| 序号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 坐标Z/cm | -110 | -90 | -70 | -50 | -30 | -10 | 10 | 30 | 50 | 70 | 90 | 110 |
利用响应面法设计多因素单目标优化正交试验方案(见表 4),按照试验方案进行建模仿真计算,提取数据。无曲形端面模型在同样数值条件下进行仿真模拟,所得压力梯度为33 565.43 Pa/m。
| 序号 | s/cm | h/cm | r/cm | Sp |  |
| 1 | 14 | 2 | 8 | 0.99 | 29 985.31 |
| 2 | 19 | 2 | 5 | 0.50 | 27 178.21 |
| 3 | 19 | 7 | 2 | 0.50 | 27 542.58 |
| 4 | 19 | 7 | 5 | 0.50 | 27 479.61 |
| 5 | 14 | 2 | 8 | 0.99 | 28 187.13 |
| 6 | 19 | 7 | 5 | 0.50 | 27 479.61 |
| 7 | 14 | 7 | 5 | 0.50 | 28 298.16 |
| 8 | 14 | 2 | 8 | 0.01 | 27 863.44 |
| 9 | 14 | 12 | 8 | 0.99 | 29 743.04 |
| 10 | 24 | 2 | 2 | 0.99 | 28 359.06 |
| 11 | 24 | 12 | 8 | 0.01 | 31 109.36 |
| 12 | 24 | 2 | 2 | 0.01 | 30 914.37 |
| 13 | 14 | 12 | 2 | 0.99 | 29 617.03 |
| 14 | 19 | 7 | 5 | 0.50 | 27 479.61 |
| 15 | 24 | 2 | 8 | 0.01 | 29 353.42 |
| 16 | 19 | 7 | 8 | 0.50 | 27 446.40 |
| 17 | 19 | 7 | 5 | 0.50 | 27 479.61 |
| 18 | 14 | 2 | 2 | 0.01 | 28 704.04 |
| 19 | 24 | 12 | 8 | 0.99 | 28 673.76 |
| 20 | 14 | 12 | 2 | 0.01 | 28 801.62 |
| 21 | 14 | 12 | 8 | 0.01 | 28 641.56 |
| 22 | 19 | 7 | 5 | 0.99 | 29 193.13 |
| 23 | 19 | 7 | 5 | 0.01 | 30 312.25 |
| 24 | 19 | 7 | 5 | 0.50 | 27 479.61 |
| 25 | 24 | 12 | 2 | 0.99 | 28 361.16 |
| 26 | 24 | 7 | 5 | 0.50 | 26 982.29 |
| 27 | 14 | 2 | 2 | 0.99 | 29 655.36 |
| 28 | 19 | 12 | 5 | 0.50 | 27 484.94 |
| 29 | 24 | 12 | 2 | 0.01 | 31 272.79 |
| 30 | 19 | 7 | 5 | 0.50 | 27 479.61 |
利用响应面法设计正交试验组时,中心点(如试验组4、6、14、17、24和30)通常会多次出现,其作用是为了提高对试验误差估计的准确性,应对中心点试验组进行多组重复试验,但本次试验方法为数值计算,可排除外部偶然因素对试验结果的影响,因此中心点的试验数据相同。从试验结果可发现,无曲形端面模型的响应量明显高于附加曲形端面的模型,这充分证明曲形端面有利于流场的平稳发展,减少能量损失。前11组和无曲形端面模型的压力梯度变化规律图如图 6所示(模型4和6相同,都为中心点)。

|
| 图 6 管内压力梯度分布 Fig. 6 Distribution of pressure gradient in pipe |
由图 6可直观看出,所有模型的压力梯度变化趋势基本一致,其差异主要集中在上、下游靠近封堵器端面的位置,且该位置的压力梯度绝对值与其他位置相比要大许多并出现正、负向峰值,主要原因是这2处流域面积发生较显著的变化,改变了管内流体原有的流动状态,从而伴随着流速和压力的巨大变化,这是造成管内流体不稳定的主要原因,并且这种现象在无曲形端面模型的上游位置更为明显。由于封堵器的动力来源是前、后端面的压差,所以压力的剧烈变化会严重扰乱封堵器正常的运动状态,不利于其平稳运行,研究流体在这2个特殊位置的流动状态具有重要意义。此外,不同模型之间在这2个位置的压力梯度也有较明显的差异,证明不同参数的曲面结构确实会对流场造成不同程度的影响,因此通过优化端面参数来提高管内流场的稳定性具有较高的可行性。
4.3 建立数学模型基于响应面法对试验结果进行初步模型拟合,发现二次模型的效果最佳,于是建立相应的数学模型:
根据方差分析发现,该数学模型与试验数据的拟合度达95.76%,因此用该模型来预测试验结果具有较高的可靠性。图 7为模型预测值与试验值的对比图,图中数据点基本分布在经过原点斜率为1的直线附近,可直观看出模型拟合效果符合建模要求。

|
| 图 7 试验值与预测值对比 Fig. 7 Comparison of experimental data and predicted values |
封堵器端面结构优化属于有约束、多变量、非线性最小化问题,设定优化目标函数如下:

针对本优化问题特点,可采用SQP算法[10](序列二次规划,Sequential Quadratic Programming Method),该算法适用于目标函数为二次函数、约束条件是线性等式或不等式的规划问题,计算结果准确性高,其优化流程图如图 8所示。利用Matlab语言进行优化算法设计,优化结果见表 5。

|
| 图 8 SQP算法流程图 Fig. 8 Flowchart of SQP algorithm |
| 参数 | S/cm | h/cm | r/cm | Sp | |
|
| 预测值 | 试验值 | |||||
| 数值 | 24 | 2 | 8 | 0.59 | 26 144.7 | 26 443.5 |
依据最优化计算得到的参数组合建立封堵器仿真模型,进行迭代计算得到的响应值明显低于所有正交试验组,且试验值与数学模型预测值的误差仅为1.1%,再次证明所建立的数学模型能准确预测试验结果,优化结果可靠性很高。将初始设计模型和优化设计模型的试验结果进行比较,结果如图 9所示。优化模型的压力梯度变化较为平缓,且在前、后端面的峰值位置后者也明显低于前者,优化效果好。

|
| 图 9 初始设计和优化设计的各位置压力梯度对比 Fig. 9 Contrast of pressure gradient of different places |
优化设计方案在满足约束范围的条件下使其响应值在初始模型的基础上减少约15%,如表 6所示,优化模型完全达到优化设计目的。
| 参数 | s/cm | h/cm | r/cm | Sp | |
| 初始模型 | 24 | 12 | 8 | 0.01 | 31 109.36 |
| 优化模型 | 24 | 2 | 8 | 0.59 | 26 443.50 |
(1)带曲形端面结构的封堵器模型对管内流场有明显改善,曲面结构对流场内流线的改变有一定的过渡作用。
(2)利用正交试验法得到拟合度非常高的数学模型,并通过试验验证其可靠性,发现试验值和数学模型的误差仅为1.1%。
(3)基于对数学模型的优化得到使管内流场最为稳定的端面结构参数组合,相比初始模型,优化封堵器模型周围的压力梯度值整体水平低于前者,且在出现峰值的前、后端面位置处更为明显,其绝对平均值降低约15%,有效改善了封堵器周围流场。优化结果对封堵器外形设计具有指导意义。
| [1] | 宋艾玲, 梁光川, 王文耀.世界油气管道现状与发展趋势[J].油气储运, 2006, 25(10):1-6. |
| [2] | 马明, 赵弘, 苏鑫, 等.油气管道封堵抢修技术发展现状与展望[J].石油机械, 2014, 42(6):109-112. |
| [3] | 耿岱, 张仕民, 王德国, 等.管道智能封堵器锚爪结构的优化[J].油气储运, 2011, 30(4):279-282, 296. |
| [4] | 樊文斌, 张仕民.管内智能高压封堵器设计[J].石油机械, 2008, 36(9):213-215. |
| [5] | 贺滕, 王维斌, 赵弘, 等.基于FLUENT管内封堵器周围流场的数值模拟[J].油气储运, 2013, 32(6):615-619. |
| [6] | ALEKSANDERSEN J, TVEIT E.The smart plug:A remotely controlled pipeline isolation system[C]//Proceedings of the International Offshore and Polar Engineering Conference, Brisbane, Australia, 2000:192-199. |
| [7] | 陈卓如.工程流体力学[M].北京:高等教育出版社, 2004. |
| [8] | 李琛, 马玉山, 高强, 等.基于Realizable κ-ε模型的控制阀流场特性研究[J].宁夏大学学报(自然科学版), 2014(4):328-331. |
| [9] | 计时鸣, 李琛, 谭大鹏, 等.基于Preston方程的软性磨粒流加工特性[J].机械工程学报, 2011, 47(17):156-163. |
| [10] | 杨世文,许小健.MATLAB优化工具箱在结构优化设计中的应用[J].科学技术与工程,2008,8(5):1347-1349. |