



0 引 言
水平井牵引器是一种用于运输各种井下工具的石油仪器,它具有运输速度快,作业效率高的特点。近年来,国内外石油企业不断设计生产出各种类型的牵引器产品,并被应用于水平井测井施工中[1, 2, 3, 4, 5, 6]。但是,不同种类的牵引器具有不同的牵引能力,为了提高牵引器的工作性能,越来越多的专家和学者对牵引器系统进行了力学研究,建立了不同的力学模型,并且取得了比较有价值的研究成果。姜元生等[7]描述了管道内拖线力的计算方法,但是其计算方法忽略了电缆自重对拖线力的影响;E.LOCAL[8]提出了施工过程中地面电缆张力的计算方法,从现场应用角度提出了水平井牵引器受到的阻力应为电缆阻力与仪器自身阻力之和,并详细描述了电缆阻力和仪器阻力的计算方法,仿真分析了不同尺寸的电缆对牵引器阻力的影响,发现了井下流体流速对牵引器阻力的影响,并把这种影响归结到仪器串的摩擦因数中,即不同流体产生的阻力可以通过改变仪器串的摩擦因数来进行计算。任晓宁[9]对水平井牵引器进行了数学几何分析和力学模型分析,研究了电缆和牵引器自由下放时的受力情况并建立了力学平衡方程式,阐明了井下流体压力阻力对水平井牵引器的影响,运用动量守恒定律计算了井下流体对牵引器产生的压力阻力。
在水平井牵引器研究方面,前人对水平井牵引器的力学分析依然存在不足,当牵引器进行水平井生产测井施工时,以往研究成果很难精确预估井下流体对牵引器的影响。为此,笔者以轮式水平井牵引器为例,详细描述其牵引动力与牵引阻力的来源,参考实际情况,考虑井下流体和井斜变化对牵引器运动状态的影响,对牵引器进行力学研究,同时考虑电缆张力、电缆自重以及井下流体的压力阻力和摩擦阻力的综合影响,建立可以计算不同井深处所需牵引力大小的牵引方程,以期为牵引器的优化设计与应用提供科学依据。
1 牵引动力与牵引阻力为了对牵引器进行力学研究,首先确定牵引器沿井眼方向的运动状况[10, 11, 12, 13]。理想状态下,牵引器匀速前进,沿前进方向作用于牵引器的外力为牵引动力与牵引阻力,即有:

牵引器工作过程中,驱动电机产生的转矩经传动系传至驱动轮上,套管对驱动轮的反作用力Ft即为驱动牵引器的牵引动力,其计算式为:

牵引阻力包括电缆阻力、仪器串摩擦阻力、井下流体阻力、井斜阻力和加速阻力,表达式为:

电缆是柔性体,只能承载轴向拉伸的张力,不能承载压力。而牵引过程中,电缆上端存在张力,所以考虑张力作用,则电缆阻力的大小受到电缆摩阻和电缆顶部张力共同影响。
基于软绳模型,对电缆阻力进行计算。假设理想状态下,电缆在直井段与井壁无任何接触,那么电缆阻力的主要来源为造斜段阻力fdz和水平段阻力fds,即fd=fds+fdz。水平段阻力fds计算式为:

对造斜段电缆阻力fdz进行研究,在造斜段管道中取电缆上一微元进行受力分析,如图 1所示。

|
| 图 1 电缆微元受力分析图 Fig. 1 Force analysis of cable element |
图 1中:β为井斜角的余角;FN为井壁支撑力,N;fu为摩擦阻力,N;q为电缆单位长度有效重力,N/m。因为Δβ2→0,所以电缆阻力计算式可写成[14]:
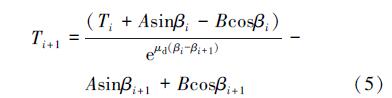
式中:Ti,Ti+1分别为第i段电缆微元上端和下端的张力;βi,βi+1分别为第i段电缆微元上端和下端井斜角的余角;R为井眼的曲率半径。其中,A=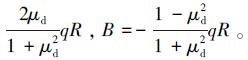
根据公式(5)可计算出电缆在造斜段中对牵引器施加的张力大小,即造斜段阻力fdz,从而计算出井下电缆对牵引器产生阻力fd的大小。
1.2.2 仪器串摩阻仪器串摩阻包含牵引器在内的所有下井仪器在工作中产生的摩擦阻力。牵引器工作时,都会使用滚轮式扶正器将仪器串居中,所有仪器的重力均作用在扶正器的滚轮上,仪器串摩阻表达式为:

式中:μg为滚轮扶正器与管道内壁的摩阻因数;α为仪器所处位置的井斜角,(°);G为仪器串重力,N。图 2为仪器串摩阻分析图,图中FNy为井壁对扶正轮的支撑力,N。

|
| 图 2 仪器串摩阻分析图 Fig. 2 Friction analysis of well tractor string |
井下施工过程中,由于牵引器前进而受到的流体作用力在牵引方向上的分力为流体阻力。流体阻力分为压力阻力与摩擦阻力2部分。作用在牵引器外形表面上的法向压力的合力在前进方向的分力,为压力阻力;摩擦阻力是井下流体的粘性在仪器表面产生的切向力的合力在前进方向上的分力。牵引器流体阻力表达为[15, 16]:

Cf、Cp与井下流体的物理性质和仪器表面材质相关,其值可通过实际测量或数值模拟计算得到。
1.2.4 井斜阻力与加速阻力井斜阻力是指牵引器由于井斜角而产生的阻力,即仪器串重力的分力。一些复杂结构井中,水平段井斜角可能会大于90°,产生了一类井斜阻力,给牵引器工作增加了难度。井斜阻力的表达式为:

牵引器加速前进时,需要克服其质量加速运动时的惯性力,就是加速阻力fa,在牵引器启动和提速时,加速阻力较为明显,其表达式为:

根据上述分析,得出了牵引器系统在前进过程中的数学模型:
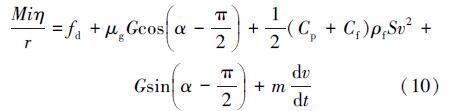
公式(10)是牵引器正常前行的牵引方程式,它表示了井下无复杂情况,套管内无障碍的理想状况下,牵引器正常牵引过程中,牵引力和外界阻力之间的相互关系。其中,由于牵引器管串表面的流体速度大小不一,流体阻力的计算较为复杂,需要运用数值模拟方法并将流体速度场离散,可以利用流体力学软件Fluent进行计算。首先对牵引器表面上的流体流速进行分析,找到流体在牵引器表面上的速度分布,如图 3所示。

|
| 图 3 井下流体在牵引器表面的速度分布图 Fig. 3 The profile of fluid velocity on the surface of horizontal tractor |
结合图 3与公式(7),通过Fluent软件进行数值模拟,即可计算出牵引器上的流体阻力大小。流体阻力的大小受到不同流体黏度c和流体速度v的影响。根据公式,计算了不同黏度和流速下牵引器所受到的阻力大小,如图 4所示。

|
| 图 4 流体阻力随流体黏度与流速变化的曲线 Fig. 4 Effects of fluid viscosity and flow rate on fluid resistance |
可见流体黏度和流速都会对流体阻力产生很大影响。一般井下流体流速会有一定的波动变化,导致了井下流体阻力的变化,最终需要根据实际情况确定流体阻力的变化范围,调整牵引力大小。
利用公式(10)计算并描绘牵引力的变化图像。假设一口井深为2 100 m的水平井,800 m处开始造斜,造斜段为一单增剖面,至井深1 585 m处进入水平段。因为电缆在地面井口处存在顶部张力F,而顶部张力F的大小会直接影响电缆阻力的大小,导致牵引器阻力变化。图 5为不同顶部张力作用下牵引器所需牵引力随井深变化的曲线。

|
| 图 5 不同顶部张力作用下牵引力随井深变化的曲线 Fig. 5 Curve of tractor force changing with well |
由图 5可以看出,当顶部张力维持不变时,随着牵引器下入深度的增加,所需牵引力不断增大;当顶部张力增大时,电缆对牵引器产生的阻力增大,所需牵引力亦需要增大;同时,顶部张力越大,牵引器自由下落所能达到的井深越小,即需要越早地启动牵引器进行牵引工作。综上所述,维持合适的顶部张力不但可以减小牵引器所受到的阻力,而且可以提高牵引器的工作效率。
3 算例分析为了验证上述模型的正确性,笔者选取了某一水平井牵引器的施工实例进行仿真计算,并与实际测量数据进行对比分析。具体完井数据如下[17]:此水平井全井测深2 800 m,地面井口至井下2 002 m井段使用 ø88.9 mm(3 1/2 in)油管完井;封隔器和尾管悬挂器位于井深2 002~2 008 m,2 008 m至井底井段完井尺寸为 ø114.3 mm(4 1/2 in),其中从井深2 288 m至井底使用了割缝衬管进行完井;井底温度80 ℃,井底压力14 MPa。
首先,施工人员将测井仪器(长度6.7 m,外径42.9 mm,质量68.0 kg)连接在牵引器(长度7.6 m,外径54.0 mm,质量86.2 kg)的前方,并整体下入井内。施工前理论推测最大自由下入深度为2 080 m处,牵引器实际到达井深2 180 m处才开始进行牵引,直至2 705 m处完成工作并记录相关数据。最后,施工人员将实际数据与仿真数据进行了对比分析。施工过程中使用了单芯电缆,外径8 mm,线重0.285 kg/m,最大拉断力5 kN。
针对上述施工过程,运用笔者提出的计算公式对牵引器的牵引力进行重新计算。首先,运用流体力学软件Fluent对井下仪器受到的流体阻力进行仿真计算。
图 6为牵引器表面动压力云图。由图 6再结合牵引器管串整体外形尺寸和流体的物理性质,沿牵引器管串表面积分便得到了井下流体与牵引器之间的相互作用力。通过运用Fluent软件计算,得到流体沿牵引器前进方向上的作用力为40.1 N,即为牵引器所受到的流体阻力ff,将这一数值带入公式(3)中,得出牵引器总阻力Ff,并绘制牵引力的变化曲线,与前人仿真曲线进行对比分析[17],结果如图 7所示。

|
| 图 6 牵引器表面动压力云图 Fig. 6 Dynamic pressure contours of tractor surface |
图 7中黑色曲线为实测牵引力曲线;蓝色曲线为前人专家预测的牵引力曲线;红色标示为笔者的模拟仿真数据。实测牵引力曲线的波动较为剧烈,主要由于井底障碍干扰、井下流体速度变化与顶部张力波动等原因造成;蓝色仿真曲线在井深2 288 m左右(进入水平段后)与实际曲线出现了分歧,前人在计算过程中一般将流体流速对牵引器的影响转化为摩擦因数的变化,仿真曲线对流速变化的反应不够明显,与实测曲线产生一定的偏差,造成了分叉现象;红色部分为笔者的计算结果,在进入水平段之后,保持仪器摩阻系数不变,加入了仪器与流体相对速度的随机扰动,一定程度上模拟了牵引力随井下流体流动而产生的变化。笔者的仿真曲线与实测曲线也存在一定程度上的偏差,但在整体趋势上符合实际情况,流体阻力的计算结果减小了与实际曲线产生的分歧,较接近实际测量值。

|
| 图 7 仿真数据与实测曲线对比 Fig. 7 Comparison between simulation data and actual result |
(1)建立了水平井牵引器牵引方程式,在确定仪器参数和井下参数后,此式可以用于预估计算牵引器需要提供的最小牵引力和不同井深处所需牵引力的大小。
(2)牵引器流体阻力的计算需要同时考虑压力阻力和摩擦阻力。研究结果表明,通常情况下,井下流体为一般的油、水和钻井液等液体时(不包含聚合物添加剂等),井下流体的黏度和流速越大,流体对牵引器产生的阻力越大;井下流体流速存在一定波动,根据流速变化情况,可以确定牵引力的变化范围。
(3)随着顶部电缆张力的增大,电缆阻力增大,所需牵引力增大,牵引器所能达到的最大自由下落深度变小;维持合适的顶部张力不但可以减小牵引器所受到的阻力,而且能够增大牵引器最大自由下落深度,提高牵引器的工作效率。
| [1] | Al-SHAWLY A S, BUALI M H, OMRAN M R, et al.Wireline well tractor technology experience in extended reach horizontal well[C].SPE 136535, 2010. |
| [2] | SCHWANITZ B, Al-SHABIBI S.Open hole, high angle tractor conveyance a collection of case stories[C]//SPWLA 55th Annual Logging Symposium, May 18-22, 2014, Abu Dhabi, United Arab Emirates, 2014. |
| [3] | MCHALLY G, HALLUNDBæK J.The application of n-ew wireline well tractor technology to horizontal well logging and intervention:A review of field experience in the North Sea[R].SPE 38757, 1997. |
| [4] | HASHEM M, DOSSARI S M.Evaluation of wireline tr-actor performance in various well completions in saudi arabia[R].IPTC 10186, 2005. |
| [5] | 侯学军, 高德利, 沈忠厚.微小井眼电机驱动CT牵引器控制系统设计[J].石油机械, 2013, 41(3):40-47. |
| [6] | 侯学军, 高德利, 沈忠厚.微小井眼连续油管钻井牵引器系统结构设计[J].石油钻采工艺, 2013, 35(2):1-5. |
| [7] | 姜元生, 陈明.管内拖缆作业机器人拖线力计算方法研究[J].管道技术与设备, 1999, 5(5):39-41. |
| [8] | LOCAL E.Wireline tractor production logging experience in australian horizontal wells[R].SPE 49994, 1998. |
| [9] | 任晓宁.爬行器测井安全评估数学及力学模型计算[J].石油仪器, 2012, 26(1):14-15. |
| [10] | 刘清友,李雨佳.水平井爬行器驱动轮力学分析[J].钻采工艺,2014,37(1):68-71. |
| [11] | 刘清友,李维国.Sondex水平井井下爬行器的研究与应用[J].石油钻采工艺,2008,30(5):115-117. |
| [12] | 白相林.水平井牵引机器人关键技术研究[D].哈尔滨:哈尔滨工业大学,2009. |
| [13] | 解旭辉,王宏刚,徐从启.微小管道机器人机构设计及动力学分析[J].国防科技大学学报,2007,29(6):98-101. |
| [14] | 高德利.油气井管柱力学与工程[M].东营:中国石油大学出版社,2006. |
| [15] | 张楠,沈泓萃,姚惠之.潜艇阻力与流场的数值模拟与验证及艇型的数值优化研究[J].船舶力学,2005,9(1):1-13. |
| [16] | 涂海文,孙江龙.基于CFD的潜艇阻力及流场数值计算[J].舰船科学技术,2012,34(3):19-25. |
| [17] | SEARIGHT T,Outwin D.Mule downhole tractor oper-ational maintenance manual[Z].2000. |