



2. 胜利石油工程有限公司钻井工艺研究院
2. Drilling Technology Research Institute, Sinopec Shengli Petroleum Engineering Co., Ltd
0 引 言
磁性导向钻井技术是利用有源磁性测量仪器控制2口或多口井的井眼轨迹在油层中平行或使其连通的一种导向钻井技术。随着磁性导向仪器的不断成熟,国外已广泛应用于超稠油SAGD开采中的成对平行水平井、煤层气开采中的连通井、控制井喷、地质勘探和固体水溶采矿等多个领域[1, 2, 3, 4, 5, 6, 7]。国内磁性导向仪器研发起步较晚,目前磁性导向钻井施工主要依靠租用或购买国外设备,成本高且不易维护。笔者通过旋转磁场测距系统目标端井下系统及源端强磁短节的结构设计,结合旋转磁场导向定位算法的仿真模拟及室内试验,有效解决了旋转磁场测距系统的关键技术难题,为今后国产磁性导向仪器的研制奠定了技术基础。
1 RMRS系统的组成及功能旋转磁场测距系统(Rotating Magnet Ranging Service,简称RMRS)主要由强磁短节、探测仪器和数据分析软件等3部分组成[8]。
强磁短节由无磁钻铤及若干永磁体组成,永磁体轴向与强磁短节轴向垂直,长约40 cm,紧跟在钻头的后面,随着钻头旋转可以在井眼周围空间产生一个动态交变磁场,作为系统的信号源。
探测仪器主要包括探管、扶正器和加重杆3部分,长约3 m。其中探管由三轴交变磁场传感器、三轴磁通门传感器、三轴加速度传感器、温度传感器、电路及无磁外壳等组成,外径42 mm,长约1.4 m。钻井期间探测仪器放于已钻井中,不仅可以探测地磁场和重力场,确定探管自身的摆放姿态,而且可以探测由磁短节产生的交变磁场,并将探测数据传输到地面计算机中。
数据分析软件可以针对采集到的测量信息进行处理分析,从而将钻头相对目标井的位置测量信息转化为工程师可读的数据。目前国外RMRS系统的最大测量范围是70 m,有效测量范围是50 m,测量误差随着距离越近,误差越小,10 m以内的距离误差为0.1 m[9]。
2 井下系统关键结构 2.1 源端强磁短节源端强磁短节钻铤内设计横纵交叉并排放有5组相同特性的强磁钢,通过旋转钻进以形成交变的磁场源,实物模型如图 1所示。该设计方案的优势在于:无需发电机驱动,功耗小,较为经济,同时对于钻头设计要求相对简单、可行。

|
| 图 1 近钻头磁钢短节实物图 Fig.1 Near-bit magnetic steel sub |
基于ANSYS电磁场仿真分析结果,近钻头强磁短节共设计120.7 mm×508.0 mm和171.5 mm×508.0 mm 2种规格,均采用多组平行分布的磁柱构成磁短节。其中120.7 mm磁短节由90个中心磁场强度为0.56 T的19.1 mm×12.7 mm钕铁硼磁材构成,而171.5 mm磁短节则由24个中心磁场强度为0.68 T的25.4 mm×53.2 mm钕铁硼磁材构成。此外,为了保证磁力线分布的有效性,磁短节的母体采用无磁不锈钢材料。
2.2 目标端井下系统目标端井下系统作为RMRS系统的重点,其总体结构设计如图 2所示。该系统除具备常规的连续测斜功能之外,还具有高灵敏度磁探测功能。

|
| 图 2 目标端井下系统总体结构图 Fig.2 Overall structure of the target-side downhole system |
减震定位装置安装在目标端井下仪器的最前端,由金属机械结构组成,具有定位和减震作用。
传感器舱主要用来获取重力加速度信息、磁场信息等井下原始数据。它由1组(3个)加速度计和1组(3个)高灵敏度交流磁通门组成。
电路舱主要是将传感器舱提供的系列井下原始数据进行解算,从而得到方位角、井斜角、工具面角(为井眼轨迹调整提供参考)及源端的空间位置信息等物理量,此外还可以为传感器舱提供电源。
微机舱主要由CPU、数据采集电路和通信电路组成,可以完成对电路舱数据的采集及井下系统与地面系统之间的通信等功能。
电源舱将地面获得交流电压转换为目标端井下仪所需的±5 V(400 mA)和±12 V(300 mA)4组直流低压,从而可为目标端井下系统提供多组电压。
磁定位舱主要用来测量井深并为系统提供井深数据。
马笼头通过单芯电缆将目标端井下仪和目标端地面系统的绞车可靠连接,可以实现目标端井下系统上、下自由行进。
3 旋转磁场导向定位算法 3.1 动态交变磁场导向定位算法原理
图 3为导向系统推算模型。根据磁场空间传播特性的研究,揭示利用交变磁场进行导向定位的原理,建立近钻头源端坐标系下磁偶极子  与目标靶区测量单元坐标系下磁场强度
与目标靶区测量单元坐标系下磁场强度  间空间引导数学模型,远距离导向定位的计算方法为[10]:
间空间引导数学模型,远距离导向定位的计算方法为[10]:

|
| 图 3 导向系统推算模型 Fig.3 Algorithm model of the guiding system |
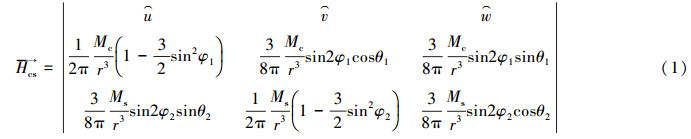
式中,w为近钻头旋转轴;Mc、Ms为彼此正交的一对磁偶极子,磁矩大小分别为 ,三者之间两两垂直,构成直角坐标系,其等效磁场为  r为测量单元的传感器所在位置与源端的距离;θ1、θ2、φ1、φ2分别是向量
r为测量单元的传感器所在位置与源端的距离;θ1、θ2、φ1、φ2分别是向量  在vw平面上的投影与v轴的夹角、在uw平面上的投影与w轴的夹角、u轴与的夹角、v轴与的夹角;α、φ0、θ0分别是 与旋转轴w之间的场强俯仰角、矢量与旋转轴w之间的俯仰角、矢量在uv平面内的方位角。
在vw平面上的投影与v轴的夹角、在uw平面上的投影与w轴的夹角、u轴与的夹角、v轴与的夹角;α、φ0、θ0分别是 与旋转轴w之间的场强俯仰角、矢量与旋转轴w之间的俯仰角、矢量在uv平面内的方位角。
假设3轴磁传感器端感应得到的合成磁场为Hcs,再由3轴磁传感器测得Hx、Hy、Hz后,即可根据已知量直接求得角度信息。最终可以通过这2个参量加上距离信息r,确定近钻头与磁传感器之间的位置关系,从而为导向提供依据。
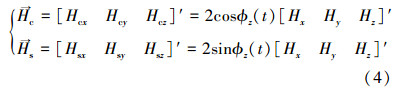
3.2 基于希尔伯特变换的特征磁场强度计算为了实现正弦信号的相位及幅度解调,特征磁场强度Hcs—→主要采用希尔伯特变换方法计算[11]。
信号Hz(t)的希尔伯特变换为Hz(t)与冲击响应为h(t)=1/πt的系统的卷积,即有:

式中,τ为卷积算子。
 的实部为原信号Hz(t),即real()=|Hz|cos(Φz(t)),虚部与原信号相位相差π/2,即image()=|Hz|sin(Φz(t))。故原信号Hz(t)的实时相位Φz(t)为:
的实部为原信号Hz(t),即real()=|Hz|cos(Φz(t)),虚部与原信号相位相差π/2,即image()=|Hz|sin(Φz(t))。故原信号Hz(t)的实时相位Φz(t)为:

分别以cosΦz(t)和sinΦz(t)对信号进行幅度解调,可得正交磁矢量  →,进而可得旋转磁偶极子的特征磁场强度
→,进而可得旋转磁偶极子的特征磁场强度  。
。
为验证上述导向定位算法,首先建立直线和曲线2组渐近曲线,A代表旋转永磁体,B代表目标点,如图 4a和图 4b所示。图 4a中曲线AB在XY平面上的投影为y=10x,图 4b的曲线AB在XY平面上的投影为  。由图 4c和图 4d可见,采用上述算法的定位精度误差随着永磁体与目标点间距离减小而降低,虽然曲线渐近的定位误差比直线渐近时大,但算法误差最大值不超过0.002 m,而且随距离越近,误差越小,定位精度越高,表明该方法能够实现利用旋转永磁体进行高精度导向定位的目标。
。由图 4c和图 4d可见,采用上述算法的定位精度误差随着永磁体与目标点间距离减小而降低,虽然曲线渐近的定位误差比直线渐近时大,但算法误差最大值不超过0.002 m,而且随距离越近,误差越小,定位精度越高,表明该方法能够实现利用旋转永磁体进行高精度导向定位的目标。

|
| 图 4 高精度导向定位算法仿真 Fig.4 Simulation of the high-accuracy guiding and positioning algorithm |
为验证旋转磁场测距系统设计的合理性以及导向定位算法的正确性,开展了RMRS系统的地面模拟试验。试验主要分2个步骤进行:首先标定磁矩系数,其次将源端磁短节小车(源端磁短节小车负责激发交变磁场,转速范围为0~600 r/min)和目标端探管分别放置于2个确定的定位点处,进行数据采集,然后解算其相对距离并与设定位置进行对比,同时在建立定位算法是利用降噪原理消除了地磁场的影响。
4.1 磁矩系数的标定
首先将源端磁短节小车移动到轨道定位点23 m处,保持磁钢中心与南北向定位点对齐,保持磁钢的方位角为270°,默认磁钢的倾斜角为90°,调整目标端探管的位置,分别在距离磁钢3、4、5、6和7 m处,调整目标端探管的倾斜角为90°,调整其方位角为270°。待源端和目标端的倾斜角和方位角参数调整完毕后,调整目标端探管的高度,要求探管高度与磁钢轴向中心保持一致;上述步骤调整完成后,调整目标端进行数据采集,提取交变磁场信号在三轴磁通门传感器上的响应信号,记为Bx、By、Bz。计算合磁场信号Bm,其中计算公式为 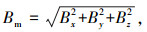 ,记其最小值为Bmin=min(Bm),则Bmin与探管和磁钢之间的距离r之间满足M=4πr3Bmin。计算5种距离的磁矩系数,取其平均值作为最终的磁矩系数M。
,记其最小值为Bmin=min(Bm),则Bmin与探管和磁钢之间的距离r之间满足M=4πr3Bmin。计算5种距离的磁矩系数,取其平均值作为最终的磁矩系数M。
磁矩系数标定完成之后,可以任意移动目标端探管和源端磁钢之间的相对位置。试验中相对设置分2种情况进行:一是没有南北偏移的情况,即目标探管和源端磁钢位于一条直线上,均位于东西方向的轨道上,试验中固定源端磁钢位置于定位点零点,仅调整目标探管在东西方向轨道上的位置;另一种情况是源端磁钢固定在东西向轨道的定位点上,而目标探管放置在南北向的定位点上,其相对位置存在南北偏移和东西偏移。
4.3 试验结果本次试验第1次在有定位轨道的模拟场地进行,主要目的是采集多种相对位置关系的试验数据,验证数据采集系统的测量范围,评估传感器探管的敏感范围,初步评价定位算法。
图 5为目标探管位于轨道东侧且旋转磁短节位于轨道西侧不同距离时的磁定位算法理论与实测结果对比。从图可以看出,磁矩系数的标定过程和矢量距离的反演计算正确,尤其当偏移小于40 m时,计算结果可靠,测量值与实际值线性匹配度很高;而当偏移大于40 m时,出现较大测量误差,且距离偏小。经过对比三轴交变信号可以发现,当超过40 m时,探管信号由于出现了饱和现象,即信号噪声较大,信号幅度不再随距离的增加而减小,表现在测量结果上即测量值比实际值偏小。

|
| 图 5 磁定位算法理论值与测量值对比 Fig.5 Theoretical value and measured value for the magnetic positioning algorithm |
为实际井下测量校验RMRS仪器设备的性能,在河南某地区ZMU1井进行了现场应用。该井组由一口洞穴直井(U1V)和一口水平井(U1H)共同组成,当中马U1H钻进至902 m,距离中马U1V井82 m左右时RMRS仪器测量出信号。且随着距离的不断减少,信号幅度越来越大。可见仪器工作正常,随后连通成功。具体数据如表 1所示。
| 测量距离/m | MWD井斜/(°) | MWD方位/(°) | MWD垂深/m | SRE南北/m | SRE东西/m | SRE垂深/m |
| 81.51 | 90.9 | 64.5 | 478.51 | 292.23 | 481.35 | 478.40 |
| 76.81 | 92.5 | 63.6 | 478.13 | 293.93 | 485.60 | 477.95 |
| 72.61 | 91.0 | 63.5 | 478.15 | 297.10 | 489.59 | 478.00 |
| 67.95 | 90.3 | 65.0 | 478.14 | 298.98 | 494.26 | 478.10 |
| 63.02 | 89.8 | 65.2 | 478.22 | 301.11 | 498.21 | 478.30 |
| 60.00 | 89.5 | 66.7 | 478.26 | 302.88 | 500.67 | 478.26 |
| 57.00 | 90.3 | 65.8 | 478.25 | 304.29 | 503.32 | 478.25 |
| 53.60 | 90.5 | 65.2 | 478.17 | 305.99 | 506.49 | 478.17 |
| 50.35 | 90.8 | 64.7 | 478.04 | 307.53 | 509.07 | 478.04 |
| 47.64 | 91.0 | 64.5 | 477.94 | 308.99 | 511.69 | 477.94 |
| 44.00 | 92.0 | 64.1 | 477.64 | 310.74 | 514.69 | 477.64 |
| 40.46 | 91.6 | 64.0 | 477.51 | 312.23 | 517.29 | 477.51 |
| 37.48 | 91.0 | 63.9 | 477.46 | 313.73 | 519.89 | 477.46 |
| 33.87 | 90.6 | 64.1 | 477.40 | 315.55 | 523.03 | 477.40 |
| 28.40 | 91.2 | 63.2 | 477.62 | 318.20 | 527.27 | 477.62 |
| 24.03 | 89.0 | 64.0 | 477.73 | 320.32 | 531.26 | 477.73 |
| 18.48 | 88.9 | 64.0 | 477.94 | 322.73 | 535.64 | 477.94 |
| 13.99 | 88.8 | 64.3 | 478.02 | 324.92 | 539.53 | 478.02 |
| 9.34 | 89.6 | 63.5 | 478.98 | 327.44 | 543.85 | 477.98 |
| 4.51 | 90.5 | 63.7 | 477.94 | 329.61 | 547.75 | 477.94 |
本次试验表明,研制的旋转磁场测距系统完全满足现场应用要求,对国产磁性导向仪的研制以及提高我国磁性导向钻井技术水平具有重要意义。
6 结 论(1)研制的旋转磁场测距系统源端强磁短节横纵交叉并排放有5组相同特性的强磁钢,通过旋转形成交变磁场源的设计方案无需发电机驱动,因此无功耗,同时对钻头无特殊要求,适用条件简单。
(2)随着源端和目标端距离的缩短,磁性导向技术定位精度增高,定位误差减小,可以实现40 m以内的精确测量。
(3)地面试验结果表明了自主设计的旋转磁场测距系统的合理性以及导向定位算法的正确性。研究结果对国产磁性导向仪器的研制以及提高我国磁性导向钻井技术水平具有重要意义。
| [1] | 林晶,宋朝晖,罗煜恒,等.SAGD水平井钻井技术[J].新疆石油天然气,2009,5(3):56-61. |
| [2] | 钱自卫,姜振泉,吴慧蕾.基于RMRS的煤矿救援准确钻井技术[J].煤矿安全,2011,42(2):52-54. |
| [3] | 刁斌斌,高德利.螺线管随钻测距导向系统[J].石油学报,2011,32(6):1061-1066. |
| [4] | 徐云龙,马凤清,冯光通.磁性导向钻井技术现状及发展趋势[J].钻采工艺,2012,35(2):35-37. |
| [5] | 徐云龙,马凤清,刘庆龙,等.旋转磁场测距系统研制及现场试验[J].石油矿场机械,2013,42(3):62-65. |
| [6] | Partt C K,Hartman R A.A magnetostatic well tracking technique for drilling of horizontal parallel wells[R].SPE28319,1994. |
| [7] | Kuckes A F,Hay R T,McMahon J,et al.New electromagnetic surveying/ranging method for drilling parallel horizontal twin wells[R].SPE27466,1996. |
| [8] | Nekut A G,Kuckes A F,Titzer R G.Rotating magnet ranging——a new drilling guidance technology[C].SPE 8th one day conference on horizontal well technology,Canadian,2001. |
| [9] | Ray T O,Wright J W,Winter D,et al.Rotating magnet ranging service and single wire guidance tool facilitates in efficient downhole well connections[R].SPE 119420,2009. |
| [10] | 田雨,王成林.有源交变磁场导向定位方法及实验研究[J].电子测量技术,2011,34(10):4-7. |
| [11] | 颜彪,杨娟.关于希尔伯特变换的分析和研究[J].电气电子教学学报,2004,26(5):27-29,48. |