 2016,
Vol. 25
2016,
Vol. 25



2. 宁波市海洋与渔业研究院, 浙江 宁波 315010;
3. 中国水产科学研究院东海水产研究所, 上海 200090
海水养殖是我国获取海洋类渔业资源的最主要方式[1],网箱养殖以其集约化、高产量和可控的优势使其成为海上渔业养殖的主要形式[2-4]。目前,我国网箱养殖已经具有了相当规模,但主要以近海及湾内为主,水体流动性差,高密度养殖对近海海水及底泥的污染日益加剧[5-6]。深远海网箱(围网)养殖作为综合多项技术发展起来的养殖模式[7],对东海外海及南海岛礁地区等深远海水体的利用有重要的战略意义,是我国海洋养殖实现可持续发展的重要方向[8],网衣破损检测则是深远海网箱(围网)能够实施的重要技术支撑。
目前国内外已提出了一些网箱网衣检测方案。日本采用声呐技术,通过网箱内外的声呐反射图像的变化判断网衣状况,但系统耗能大、成本高,且不易判断具体破损位置[9-10]。挪威和美国多采用水下摄像技术,在网箱内部配置固定的带有云台的摄像头,对网箱整体进行视频监视判断网衣状况[11],但由于区域范围大,对于海水能见度要求过高,特别是深水低照度部分,难以良好实现。国内提出过在网衣网线中加入导线判断破损状况的方案,但并未进行实验验证[12]。目前国内大型网箱或围网主要以潜水员下水排查检测为主要方式,成本高且检查效率低,难以满足要求。考虑到水产行业的成本要求,从业人员实际现状,且深远海地区电能相对短缺,框架式AUV(Autonomous Underwater Vehicle)具有浮重力调节方便、成本低、抗浪性好、重量轻的特点,是解决这一问题的可行性技术方案之一。
框架式AUV方案技术难点主要包括有效的巡查模式、合理的结构与动力系统、关键模块的密封、水下视频拍摄与大带宽数据通讯等。针对国内主要采用的圆柱形网箱和围网,为能全方位检查所有的水下网衣,本文基于AUV转艏舵和浮沉舵功能提出了螺旋式巡查模式,在网衣遍历和可控性方面优势明显。进一步从抗浪流和续航能力方面着手进行了动力系统设计,形成了基于水下视频和微波通讯的较为完善的工作思路。
1 框架式AUV工作模式设计与运动建模水产行业特点决定了常规AUV可以实现网衣检测功能但成本高,实施难度大。为此,基于AUV的工作原理,本文提出了一种框架式AUV设计方案,功能设计集中于网箱中水下运动和视频拍摄及传输。鉴于绝大多数大型网箱(围网)圆柱形的特点,提出了螺旋式行进的工作模式,并对其进行运动建模以实现这一控制功能。
1.1 框架式AUV工作模式的提出图 1为框架式AUV螺旋式工作模式,AUV沿螺旋线方向向下行进,行进过程中拍摄图中阴影区域网衣的实时状况,经由整个行进过程,完成网衣整体的检测工作后改变浮沉舵角度实现自动上浮。AUV路径规划是实现遍历检测功能的关键环节。系统水下摄像装置在象山港港湾内海水的试验表明,大潮情况下,当拍摄点距离网衣大于0.9 m时,视频模糊不清,无法进行网衣检测,小潮时拍摄点距离网衣1.5 m可以拍摄到满意的清晰度。本系统采用水下摄像头广角为150度,为保证拍摄区域竖直高度高于1.5 m,需保证AUV离开网衣至少0.5 m。根据以上边界条件,当给定网箱参数后,可得到最合适的行进路径及误差范围。

|
图 1 框架式AUV螺旋式工作模式
Fig. 1 Frame-type AUV spiral motion mode
|
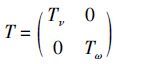
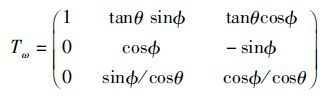
运动建模是实施控制的基础,这里有静态坐标和AUV姿态动态坐标两个部分。AUV的动力方程在动态坐标系中构建,而运动轨迹及AUV姿态则以大地静态坐标系为基准描述。本文以AUV出发点为原点建立大地坐标系,在此基础上可得到从自身动态坐标系转换为大地坐标系的转换矩阵:
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中:Φ、θ 和 φ 分别为AUV的横滚角、纵倾角和偏航角。
框架式AUV整体建模时参照6自由度的控制动力学模型[13]:
 (4)
(4)
式中:
AUV在航行过程中因水流等干扰存在,实际轨迹会存在偏差,为此,系统采用PID外控制回路和由动力学特性进行补偿的内控制回路相结合的方法,确保AUV实际行进路径始终处于误差允许范围内。系统控制结构如图 2所示。

|
图 2 控制系统结构图
Fig. 2 Control system structure diagram
|
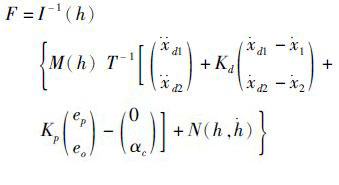
通过分析AUV的位置和姿态偏差,从系统控制动力学模型分析,引入偏微分的比例方程及两个调节矩阵参数Kd(和Kp正定阵)即可得到AUV控制的完整表达式:
 (5)
(5)
式中:xd1、xd2为AUV在大地坐标系中的位置及姿态参数,xd1=(xd yd zd)T,xd2=(Φd θd φd)T;x1、x2为其相同描述下的实际位置参数;ep、eo分别为AUV位置和姿态误差[14],ep=x1-xd1,eo=12×(n×nd+O×Od+a×ad )。
1.3 框架式AUV系统参数设计基于上述运动模型,设计了框架式AUV的基本结构,整体由1.骨架、2.浮心调块、3.水下照明装置、4.水下监控装置、5.重心调块、6.主控单元、7.水下推进器、8.转艏舵和9.浮沉舵共9部分组成,如图 3。

|
图 3 框架式AUV总体结构
Fig. 3 The general structure of frame-type AUV
|
框架式AUV整体动力由一个水下推进器提供,通过控制尾端转艏舵和浮沉舵的角度实现螺旋式行进。该结构优势在于整体浮心和重心可以调节到合适的位置简化模型:当浮心、重心及推进力调配到同一平面内之后,要控制器完成固定参数的螺旋形轨迹,只需考虑推进器、浮沉舵和转艏舵对应的3个自由度控制即可。由于AUV运行误差设计目标为分米级,对精确度没有特别高的要求,对其进行动力学模型分析时,重力、浮力、推进力和水动力只做基本的研究即可。由于设装备重心与坐标原点重合,可以将上述4个力从大地坐标系转化为局部坐标系描述。
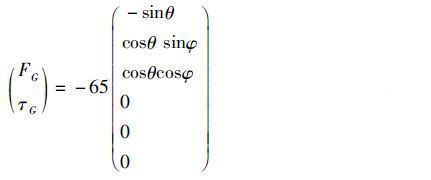
AUV总重G=6 440 g,以其重心作为局部坐标系原点,则其重力及重力矩可转换为:
 (6)
(6)
系统调节总排水体积约为6 510 cm3,浮力约为B=65 N。通过调块将AUV的浮心调整至其重心的正上方12 cm处,保证装备的稳定性。此时yb=0.12 m,则可计算在局部坐标系中的浮力及浮力矩:
 (7)
(7)
推力及水动力本身即为在局部坐标系中的描述,在模型简化之后计算较为简单。系统采用1个水下推进器,根据经验选取了额定转速2 000 r/min、推力T=10 N的水下推进器,设置推进器施力点与重心的相对坐标为(-300,-8),xb=-0.3、yb=-0.12。根据T、xb和yb即可得到推力和推力矩
本系统针对水动力模型进行了简化,水动力主要由整体在0.6 m/s时的流体阻力构成,实验测得为6.7 N。根据舵片面积和偏转角度可得水动力和水动力矩
针对每一个深水网箱尺寸可推算出一个参数固定的AUV理想路径的数学描述,结合上述重力、浮力、推力和水动力4个参数计算出两个调节矩阵参数Kd和Kp,即可得到AUV控制方程的完整表达式。
2 系统工作模式及附属子系统设计框架式AUV系统结构如图 4所示,主要由1.AUV主体单元、2.通讯浮子和3.接收基站组成。在整个系统中,主控单元控制水下推进器和浮沉、转艏舵的动作,配合位置姿态传感器,保证AUV完成螺旋式行进工作。通讯浮子浮于水面,是能源供应系统和通讯发射端的支撑结构。水下监控装置在AUV运行过程中对其所经过路径的外侧网衣进行全方位拍摄,所得视频资料通过发射单元传回接收基站,通过传回的视频对网衣的观察判断,实时完成网衣巡检工作。

|
图 4 框架式AUV系统工作模式
Fig. 4 Working mode of frame-type AUV system
|
水下监控装置作为实现系统目标的关键环节,其视频质量和可靠性必须满足较为恶劣的海况要求。视频质量主要取决于装置的镜头、感光芯片及视频数字处理模块。由于海水能见度有限且随着下潜深度的增加照度逐渐变低,视频的清晰度及装置在低照度情况下的抗噪能力为技术关键。
水下监控装置配置选用雄迈53H20PL-S处理方案配合SONY IMX222超低照度CMOS传感器,视频分辨率1920×1080,最低使用照度0.001 Lx,信噪比大于50 db。镜头的选用主要考虑广角范围,装置选用TAS-02512-3MP广角镜头,配合所选CMOS,水平视场角可达150度,镜头前配置可自动切换的IR-CUT双滤镜,自动调节光线强弱,得到最佳图像效果。装置可靠性主要考虑结构的密封和承压。外壳采用透光性能良好的有机玻璃加工,密封结构主要靠挤压丁腈橡胶圈完成。该装置在海上20 m水深进行了48 h抗压及密封测试,满足使用要求。
2.2 微波视频通讯系统设计通讯装置是可以实时获得网衣信息的关键,水下视频资料通过图 4中所示通讯浮子上全向天线发射到基地,经由接收端全向天线接收传输至显示终端,完成网衣的实时监测。由于海上几乎没有其他用户信号干扰,全向天线选用穿透距离好、覆盖距离远的2.4 GHz频段。系统的发射和接收端均采用LG-HWAP20全向天线,保证在有恶劣天气干扰的情况下仍有较好的通讯效果。海上现场试验表明所设计的通讯系统距离在1 500 m内表现正常,可以满足实际需求。
2.3 能源供应系统设计由于深远海网箱养殖的特殊性,系统不能依托陆地电缆进行电能供给,为了增加装置在梅雨等季节的实用性,需满足连续7 d阴雨情况下保证正常工作。本设计采用了太阳能电池板配合蓄电池的供能方案。为减少AUV负重,降低其控制难度,整个供能系统设置于通讯浮子上。蓄电池容量选用30 Ah,埋于整个浮子下方,通过低重心避免浮子在风浪情况下产生过大的倾斜和翻滚,采用2块20 W(480×350 mm)太阳能板进行能量补充,对称分布于浮子顶端。综合各个用电设备的工作时间和功率,整套系统用电情况如表 1所示。

|
表 1 系统用电量分析 Tab.1 Electricity consumption analysis |
装置所用2块功率为20 W的太阳能板在正常光照情况下(6×104~1×105 lx),实测每小时可产生电量约3.5 Ah,充电能力有较大冗余。在连续7 d阴雨天气时,总耗电量约为23.73 Ah,蓄电池用量按照80%计算仍为24 Ah,可以满足系统使用。
3 系统现场应用试验为验证装置的实用性,于2015年7月12日-18日进行了多批次检测试验,试验地点选择为浙江省重要的海水养殖基地象山港海域[15]。试验在两组直径为20 m、深度为5 m的养殖大黄鱼圆柱形网箱进行,网衣颜色为墨绿色和黑色两种,基地设在距离网箱270~360 m的海上平台,如图 5所示。

|
图 5 象山港海域圆形网箱
Fig. 5 Round offshore cage of Xiangshangang Bay
|
试验分为两部分,首先针对小网目黑色网衣网箱,分别在流速为0 m/s、0.4 m/s、0.8 m/s、1.2m/s的情况下进行了4组试验,对照比较流速对AUV行进路径的影响;然后在流速适中的0.4 m/s下,对墨绿色大网目网衣网箱进行检测试验,对照比较水下摄像装置对不同颜色网衣的识别度。本试验用海流计实时测得海流流速,每次试验过程中流速误差在±0.05 m/s范围内时认定结果有效。图 6展示了AUV从下水、启动、下潜即将消失到最后完成检测浮出水面的整个过程。

|
图 6 试验过程
Fig. 6 Experimental process
1. 下水; 2. 启动; 3. 下潜; 4.上浮。 1. entering; 2.commisioning; 3.diving; 4.floating. |
水下摄像成像方面,图 7显示了绿色大网目网衣(上图)和黑色小网目网衣(下图)的水下观测情况。在不同规格网目和颜色情况下,水下视频均清晰地展现出了网衣在水下的整体状况,达到了预期效果。

|
图 7 水下视频监控系统观测图像
Fig. 7 Pictures from underwater video supervising system
|
抗流性能方面,当水流速度小于0.8 m/s时,AUV运行相对稳定,和网衣的距离维持在0.5~1.2 m之间,满足拍摄要求;但是当水流速度大于0.8 m/s时,部分区域会出现脱离预定轨道的状况,导致AUV距离网衣过远,图像资料变模糊,无法进行检测工作。为了解决此问题,可以根据潮位确定装备的使用时间,利用每天的平潮和停潮期,在海流速度较小的时间段进行。
4 总结本文开发了一个新的用于大型圆柱形网箱(围网)的低成本框架式AUV,提出了低能耗高可靠的螺旋式工作模式,开发了相应的控制软硬件、水下视频与通讯和能源供应等附属系统。现场试验表明,在流速小于0.8 m/s的情况下,该系统可以较好地实现工作要求。针对大海流情况下实际轨迹发生偏移的问题,从控制系统出发,根据潮流变化规律,动态改变每天的工作时间,形成了合理的使用方法。现场试验结果表明了所研发装备的有效性,下一步通过图像处理技术自动实现破损辨识将能够使本系统更加完善。
| [1] | 林德芳, 关长涛, 黄文强.海水网箱养殖工程技术发展现状与展望[J]. 渔业现代化, 2002: 6–9. LIN D F, GUAN C T, HUANG W Q.Development and prospect of sea cage cultivation engineering technology[J]. Fishery Modernization, 2002: 6–9. |
| [2] | 张国胜, 陈勇, 张沛东, 等.中国海域建设海洋牧场的意义及可行性[J]. 大连水产学院学报, 2003, 18(2): 141–144. ZHANG G S, CHEN Y, ZHANG P D, et al.Significance and feasibility of establishing marine ranching in Chinese sea area[J]. Journal of Dalian Fisheries University, 2003, 18(2): 141–144. |
| [3] | 陈向明.浅谈海水网箱养殖[J]. 科技致富向导, 2009: 118. CHEN X M.Discussion on sea cage cultivation[J]. Guide of Sci-tech Magazine, 2009: 118. |
| [4] | MOJJADA S K, IMELDA J, RAO P S, et al.Design, development and construction of open sea floating cage device for breeding and farming marine fish in Indian waters[J]. Indian Journal of Fisheries, 2013, 60(1): 61–65. |
| [5] | 赵仕, 徐继荣.海水网箱养殖对沉积环境的影响[J]. 黑龙江科技信息, 2009: 117–119. ZHAO S, XU J R.Effect of sea cage cultivation on sedimental environment[J]. Heilongjiang Science and Technology Information, 2009: 117–119. |
| [6] | 韩芳, 霍元子, 杜霞, 等.象山港网箱养殖对水域环境的影响[J]. 上海海洋大学学报, 2012, 21(5): 825–830. HAN F, HUO Y Z, DU X, et al.Effect of fish-cage culture on water environment in Xiangshan harbor[J]. Journal of Shanghai Ocean University, 2012, 21(5): 825–830. |
| [7] | 景发岐.深海网箱养殖与传统网箱养殖比较研究[J]. 河北渔业, 2010: 58–59. JING F Q.The comparative studies between deep-sea cage culture and traditional cage culture[J]. Hebei Fisheries, 2010: 58–59. |
| [8] | 宋玉刚, 郑雄胜.深海网箱网衣清洗系统设计研究[J]. 机械研究与应用, 2012: 41–43. SONG Y G, ZHENG X S.Design and study of the clean equipment of deep-sea net cage[J]. Mechanical Research & Application, 2012: 41–43. |
| [9] | BJERKENG B, BORGSTROM R, BRABRAND A, et al.Fish size distribution and total fish biomass estimated by hydroacoustical methods: a statistical approach[J]. Fisheries Research, 1991, 11(1): 41–73. |
| [10] | HORNE J K, JECH J M.Multi-frequency estimates of fish abundance; constraints of rather high frequencies[J]. ICES Journal of Marine Science, 1999, 56(2): 184–199. |
| [11] | LOVE R H.Maximum side-aspect target strength of an individual fish[J]. The Journal of the Acoustical Society of America, 1969, 46(3B): 746–752. |
| [12] | 叶盛, 王俊.深水网箱网衣破损监测系统设计[J]. 农业机械学报, 2006, 37(4): 94–96. YE S, WANG J.Design on cage net crack detecting system of sea cage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4): 94–96. |
| [13] | 边宇枢, 高志慧, 贠超.6自由度水下机器人动力学分析与运动控制[J]. 机械工程学报, 2007, 43(7): 87–92. BIAN Y J, GAO Z H, YUN C.Dynamic analysis and motion control of 6-dof underwater robot[J]. Chinese Journal of Mechanical Engineering, 2007, 43(7): 87–92. |
| [14] | LUH J, WALKER M, PAUL R.Resolved-acceleration control of mechanical manipulators[J]. IEEE Transactions on Automatic Control, 1980, 25(3): 468–474. |
| [15] | 董鹏, 张海波, 叶仙森, 等.象山港中部海域大型底栖动物群落组成及多样性特征[J]. 上海海洋大学学报, 2015, 24(3): 430–440. DONG P, ZHANG H B, YE X S, et al.Community structure and biodiversity characteristics of macrobenthos in the middle of Xiangshan bay[J]. Journal of Shanghai Ocean University, 2015, 24(3): 430–440. |
2. Research Institute of Marine and Fishery, Ningbo 315010, Zhejiang, China;
3. East China Sea Fisheries Research Institute, Chinese Academy of Fishery Sciences, Shanghai 200090, China