 2022, Vol. 40
2022, Vol. 40


2. 中国电子科技集团公司第二十研究所,西安 710068;
3. 四创电子股份有限公司,合肥 230011
2. The 20th Research Institute of China Electronics Technology Group Corporation, Xi′an 710068, China;
3. Sun Create Electronics Co., Ltd., Hefei 230011, China
随着智能变电站模块化施工、输电线路机械化施工等新技术的应用,对电网建设工程的安全质量过程控制要求越来越高。大多数输电线路工程需要经过高山、密林、荒漠等地区,具有距离远、河道窄、施工环境复杂等特点。特别是当输电线路建设需要穿越一些涉及公共安全和网络安全的重要设施时,如铁路、公路等重要线路,安全质量监控的风险和难度迅速增加[1]。因此,有必要采用新技术辅助安全质量监测。将小型化多旋翼无人机引入输变电工程的安全质量监测工作,可有效保障电网的安全建设[2]。
1 多旋翼无人机系统原理 1.1 无人机系统构成按照不同平台构型来分,无人机(Unmanned Aerial Vehicle,UAV)主要包括固定翼无人机、无人直升机和多旋翼无人机。综合考虑山区起降场地的局限性和基础设施安全质量精细控制的需要,经比较,采用小型多旋翼无人机最为适合。多旋翼无人机由飞行控制系统、电源系统、无刷电动机、摄像设备负载、地面监控站和地空数据链路等部分组成[3],系统总体架构如图 1所示。

|
| 图 1 UAV系统总体架构图 Figure 1 Overall architecture of UAV system |
飞行控制系统是无人机的核心,负责控制所有的工作状态和控制响应,包括惯性测量单元(Inertial Measurement Unit,IMU)、磁罗盘模块、高精度定位模块、气动测量模块、超声波测距模块、视频识别模块等[4-5]。飞行控制系统示意图如图 2所示。

|
| 图 2 飞行控制系统示意图 Figure 2 Diagram of flight control system |
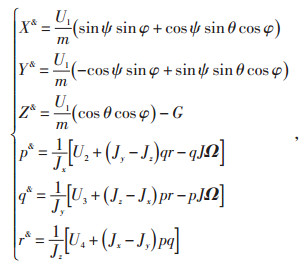
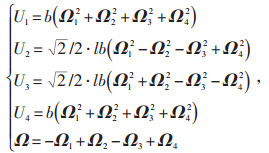
在多旋翼无人机动力学建模中,首先建立了大地惯性坐标E(OEXEYEZE)和机体坐标系B(OBXBYBZB)两个坐标系[6-9]。考虑到多旋翼无人机的特性和可实现性,本文为简化处理,选取了四旋翼无人机进行分析,通过动力学分析建立相应运动方程为:
|
(1) |
|
(2) |
式中:φ、θ、ψ—滚转角、俯仰角和偏航角;
Ω —机体坐标系下的角速度向量,Ω = [p, q, r]T,其中,p、q、r分别为滚转角速度、俯仰角速度和偏航角速度;
p&、q&和r&—滚转角加速度、俯仰角加速度和偏航角加速度;
X&、Y&和Z&—大地坐标系下OX、OY和OZ三轴的加速度向量;
Jx、Jy和Jz—四旋翼无人机相对于OX、OY和OZ三轴的转动惯量;
m—无人机质量;
Q1、Q2、Q3、Q4—无人机4个旋翼对应的转速;
U1、U2、U3、U4—无人机4个控制通道的控制输入;
Ω1、Ω2、Ω3、Ω4—无人机4个旋翼对应的角速度向量;
G—重力;
l—四旋翼无人机的臂长;
b—旋翼的拉力系数。
2 无人机巡检工作流程 2.1 检查内容无人机专项检查的内容根据不同对象(包括输电线路和变电站工程)和工程的不同检查阶段确定[8]。主要包括三方面内容:
(1)重点检查道口区域内道口平面布置、高处安全防护措施和附近带电体作业情况及附近带电设备情况;
(2)检查变电站钢结构厂房施工、重型设备吊装等高风险作业的现场布置和安全措施;
(3)针对架空输电线路成塔阶段、架线阶段及运行前的验收情况,对无塔材、螺母、防松垫圈、锁销等进行专项检查。
2.2 检查程序(1)考虑到无人机的信号范围和续航极限,根据施工现场的具体情况设置无人机的飞行轨迹;
(2)按照设定的航线进行飞行操作;
(3)使用无人机采集的音频和视频数据进行检查监控施工现场。
(4)根据违规性质或缺陷等级,及时向责任单位发出整改通知单进行整改。对于需要放大确认的信息,存入数据库进行后期分析鉴定,之后要求责任单位整改并闭环管理[10]。安全质量监测流程如图 3所示。

|
| 图 3 UAV安全质量监测流程图 Figure 3 UAV safety and quality monitoring process |
无人机巡检作为人工协同巡检的一种技术手段,常在地形复杂、全景有限的山区,以及高海拔人眼难以巡查等区域进行,主要涉及安全文明施工、交叉施工安全监控、架空线路质量检查验收等电网建设工程内容。电网施工监管给企业带来的直接效益一般不易量化,一旦发生安全质量事故,将会造成严重的后果。对此可以通过以下两方面对电网建设工程应用效益进行评价:
(1)通过衡量避免施工安全质量事故所造成的损失来量化施工管理给企业带来的间接效益;
(2)通过比较人工巡检和无人机巡检所需的人员、时间和成本来评价无人机巡检的效率。
3 无人机应用性能分析以某220 kV变电站架空输电线路工程为例,根据架空输电线路验收评价标准,竣工验收项目包括需要高空作业的45项,其中38项可由无人机替代验收,占比84.4%。与人工巡检相比,使用无人机巡检方式具备以下优势:
(1)无人机起降条件低、准备周期短、巡检效率高、成本低;
(2)无人机受气象、地理条件的影响较小,生存能力强,机动性能好,便于操作;
(3)无人机不仅是一种巡检平台,同时作为一种高效的电力线路资产数据获取与建模手段,有助于提高电网运行管理的信息化水平。
本文主要从两方面对无人机巡检性能进行分析。
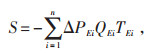
3.1 避免安全事故损失高空作业、穿越作业和相邻带电线路等高风险作业容易出现施工安全风险。根据以往的工程统计数据列出基本事件概率,根据安全风险降低计算间接收益。
|
(3) |
其中,S为安全收益;ΔPEi为事件Ei降低的安全风险概率;QEi为事件Ei的每日综合损失,TEi为事件Ei对应的连续损失时间。
一旦出现安全问题,可能导致人员伤亡。除造成工程进度损失外,全线整改检查,对人员伤亡进行赔偿,追究相关人员责任,对经营单位给予经济处罚;线路时间窗口重新申请周期较长,整个过程将对项目进度造成不可挽回的延误损失。
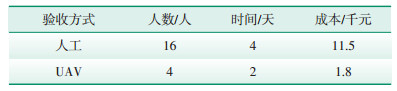
3.2 节省检验时间和成本如果采用传统的人力验收方式完成上述38个高空验收工程,需要16人4天,而无人机巡检验收仅需4人2天,大大降低了人力资源消耗和检验成本,验收效率得到了有效提升。成本对比如表 1所示。
| 表 1 人工验收和UAV验收成本对比 Table 1 Cost comparison of manual acceptance and UAV acceptance |
本文结合多旋翼无人机巡检系统在电网工程安全质量监测中的应用,阐述了多旋翼无人机系统和飞行控制系统的组成、无人机巡检评价方案和电网基础设施项目情况。根据实际应用效果,从巡检时间、成本、安全风险等方面衡量了无人机巡检效率。实践证明多旋翼无人机巡检在扩大控制范围、提高工作效率、降低劳动强度等方面可发挥显著作用,具有广阔的应用前景。
| [1] |
崔健, 李鲁锋, 郑伟, 等. 多旋翼无人机航测技术在工程施工中的应用[J].
山东建筑大学学报, 2019, 34(4): 67-73 CUI Jian, LI Lufeng, ZHENG Wei, et al. Application of multi-rotor UAV aerial survey technology in engineering construction[J]. Journal of Shandong Jianzhu Uni-versity, 2019, 34(4): 67-73 (  0) 0)
|
| [2] |
陈晗. 基于无人机航空摄影的输电线路树障巡视[J].
电工材料, 2021(3): 48-49 CHEN Han. Tree barrier inspection of transmission lines based on UAV aerial photography[J]. Electrical Engineering Materials, 2021(3): 48-49 ( 0)
|
| [3] |
王永强, 车凯, 戴铎, 等. 电力巡检无人机精准降落方法研究与应用[J].
计算技术与自动化, 2021, 40(2): 41-46 WANG Yongqiang, CHE Kai, DAI Duo, et al. Research and application of adaptive landing method of electric patrol UAV[J]. Computing Technology and Au-tomation, 2021, 40(2): 41-46 ( 0)
|
| [4] |
李鲁锋. 多旋翼无人机技术在工程施工管理中的应用[D]. 济南: 山东建筑大学, 2020.
LI Lufeng. Application of multi-rotor UAV technology in engineering construction[D]. Jinan: Shandong Jianzhu University, 2020. ( 0)
|
| [5] |
姜林波, 叶国平, 龚精业. 高压输电线路的无人机电力巡检技术[J].
电子世界, 2021(11): 21-22 JIANG Linbo, YE Guoping, GONG Jingye. Unmanned aerial vehicle electric patrol technology for high voltage transmission line[J]. Electronics World, 2021(11): 21-22 ( 0)
|
| [6] |
吕学伟, 宋福根. 多旋翼无人机输电线路巡检避障技术综述[J].
电气技术, 2021, 22(4): 1-6, 19 LÜ Xuewei, SONG Fugen. Overview of multi rotor unmanned aerial vehicle transmission line inspection and obstacle avoidance technology[J]. Electrical Engineering, 2021, 22(4): 1-6, 19 ( 0)
|
| [7] |
郝向新, 韩伟. 超远距离数据链信息传输技术在无人机上的应用[J].
内蒙古电力技术, 2020, 38(4): 57-63 HAO Xiangxin, HAN Wei. Application of information transmission technocogy of ultra long distance data link in UAV[J]. Inner Mongolia Electric Power, 2020, 38(4): 57-63 ( 0)
|
| [8] |
朱铁林. 卫星通信在无人机电力巡线中的应用分析[J].
内蒙古电力技术, 2020, 38(3): 50-54 ZHU Tielin. Application analysis of satellite communication in UAV power line inspection[J]. Inner Mongo-lia Electric Power, 2020, 38(3): 50-54 ( 0)
|
| [9] |
林宇龙, 李冰, 王德宇, 等. 多旋翼无人机巡查系统在特高压基建工程中的应用[J].
中国电力, 2017, 50(12): 141-147 LIN Yulong, LI Bing, WANG Deyu, et al. Application of multi-rotor UAV patrol system in UHV power grid construction[J]. Electric Power, 2017, 50(12): 141-147 ( 0)
|
| [10] |
杨成顺, 杨忠, 葛乐, 等. 基于多旋翼无人机的输电线路智能巡检系统[J].
济南大学学报(自然科学版), 2013, 27(4): 358-362 YANG Chengshun, YANG Zhong, GE Le, et al. Transmission line intelligent inspection system based on multi-rotor unmanned aerial vehicle[J]. Journal of University of Jinan (Sci. & Tech.), 2013, 27(4): 358-362 ( 0)
|