 2020, Vol. 38
2020, Vol. 38 


绝缘子串是高压输电线路的重要组成部分,皆具固定和保护功能。目前对绝缘子串的运行维护通常采用电压分步法进行检测,操作人员利用绝缘操作杆搭载火花间隙测试叉在杆塔上对绝缘子进行逐片检测,这种方式存在劳动强度大、稳定性不足且灵活性差等缺陷[1-4]。对此本文提出1种多自由度、多点平行支撑兼具定位功能的绝缘子串检具的支撑装置,用于支撑架空输电线路上使用的绝缘子劣化状态检测工具。
1 多自由度支撑装置的结构设计 1.1 整体结构绝缘子串检具支撑装置结构见图 1,其中合成运动机构的4个主要组成部分如图 2所示。铰链螺杆、锁紧螺母和U形架用于将支撑装置整体固定于杆塔,角钢固定座与杠杆支座铰接,杠杆支座的左侧为检具俯仰调整机构。

|
图 1 检具支撑装置整体结构示意图 |
工作时,绝缘杆通过滑套支座与装置连接,滑套支座相当于绝缘杆的扶手,内部可变形的强阻尼材料有助于绝缘杆的轴向定位;杠杆支座与角钢固定座的连接可实现装置的左右转动;锁紧手柄则用于绝缘杆确定位置后检具支撑装置的定位和制动;上、下支撑杆及氮气弹簧与杠杆支座的铰接可实现绝缘杆的俯仰运动;氮气弹簧的阻滞特性可使装置自主回到平衡状态,操作人员只需手扶绝缘杆调整检具的位置即可。上述过程替代了操作人员高空双手举撑绝缘杆调整检具位置,从而实现省力的目的。
2 多自由度支撑装置设计参数计算 2.1 合成运动机构的自由度计算由于杆塔高空作业空间较为狭小,操作人员体位转换不灵活,因此要求检具支撑装置具有灵活的位置转换能力。为便于计算,将杠杆支座固定后转换为平面机构,自由度F′的计算公式为:F′= 3n - 2pl - 2ph,其中,n为活动构件的数量;pl为机构中低副的数量;ph为高副的数量。
上、下位氮气弹簧处存在虚约束,因此活动构件与运动副的计算仅需考虑1个氮气弹簧即可。经计算,n=5,pl=5,ph=0,因此装置的自由度为1。同时,杠杆支座还具有1个转动自由度,因此装置的总自由度F=2。
可见,高空作业人员在不转换身体位置的情况下即可实现对绝缘子串检具的灵活调整。
2.2 合成运动机构的省力计算具有相对运动特性的零部件之间通过连接副实现运动与载荷的传递,因此需要其具有足够的强度与刚度可靠性。本节主要计算上、下支撑臂与杠杆支座和氮气弹簧之间连接铰点的受力,各构件的受力简图如图 3所示。

|
图 2 合成运动机构局部放大示意图 |

|
图 3 绝缘杆支撑装置受力分析简图 |
由∑MF(O1) = 0可得公式(1)、(2):
|
(1) |
|
(2) |
于是关节o1处的受力为:
|
(3) |
同理,由∑MF(B2) = 0可得:
|
(4) |
|
(5) |
关节o2处的受力为:
|
(6) |
经计算,f1=f2=132 N,fE=-53.2 N,fD=45.258 N,将数据带入相关公式后可得:f1x=f2x=2.34 N,f1y=-23.38 N,f2y=14.9 N,fo1=23.49 N,fo2=15.08 N。
可见,在o1、o2处f1y、f2y方向与预期相符(向下)且f1y+f2y=-38.28 N,此力为支撑装置为平衡操作杆及检具重力所产生的力(即替代的部分人力),从而达到减轻操作人员负担的目的。
3 多自由度支撑装置运动仿真 3.1 建立仿真模型装置为获得近线端的运动特性,过程铰点、弹簧铰点处的关节力,采用Adams软件进行仿真分析,仿真模型如图 4所示。

|
图 4 多自由度支撑装置的仿真模型 |
支撑装置良好的运动性态主要通过近线端的运动速率与定位稳定性、可靠性来体现,主要受构件尺寸与位置关系的影响,其中过程铰点对运动性态影响见图 5和图 6。

|
图 5 近线端与过程铰点不同位置的速度对比分析 |

|
图 6 近线端与过程铰点不同位置的加速度对比分析 |
近线端的速度变化规律体现了支撑装置的变位效率,加速度变化规律则反映近线端工作的平稳性,以过程铰点的位置为变量,由图 5可知,过程铰距增加则近线端速度减小,因此减小过程铰点的距离有利于提高近线端的工作效率。
从图 6可见,近线端加速度变化规律与速度变化规律整体相同,明显的区别在于过程铰点与杠杆支座距离越大时加速度最低值越小,同时加速度曲线趋于平缓,说明加速度对过程铰点位置敏感,由此可见增加过程铰点的距离同样有利于提高近线端工作的平稳性和安全性。
3.3 过程铰点与弹簧铰点处关节力分析在近线端施加30 N不随构件变化的向下牵引力,模拟绝缘子串检具的重力和偶发载荷,其他条件不变,计算可得上、下过程铰点和上、下弹簧铰点4个参数随支撑装置展开和收缩时的受力变化情况,如图 7、图 8所示。

|
图 7 上下过程铰点受力的过程变化规律 |

|
图 8 上下弹簧铰点受力的过程变化规律 |
从图 7可知,上、下过程铰点受力变化规律相同,线性回落后上升,但是下过程铰点的载荷始终远大于上过程铰点,可见上过程铰点只是发挥了传递载荷的作用。
图 8反映出上、下弹簧铰点之间受力存在相反的态势,上弹簧铰点受力线性上升后线性回落,下弹簧铰点则线性下降后回升,两者的最大值分别为7.57 N、163.14 N,差别极大。图 7和图 8均反映出下氮气弹簧为主要受力弹簧,因此下氮气弹簧与两端相关构件的铰接位置应该进行强化设计,以保证结构的强度和刚度。
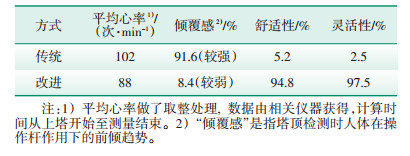
4 支撑装置的应用按照设计方案完成样机制作,选择某型输电杆塔开展试验。Freedson[5]等研究认为,心率在110~ 150次/min时,心率与耗氧量呈线性关系。可见心率快慢反映了体能消耗量,因此选择了30名工作人员作为测试对象,每人完成相同测试流程,依据2种操作方式下个体的平均心率和操作感受检测工作的使用效果,见图 9和表 1所示。分析表 1数据可知,利用支撑装置操作更具有安全性、灵活性。

|
图 9 传统手持方式与改进支撑方式操作比较 |
| 表 1 传统与改进方式的对比分析 |
(1) 通过对装置的结构特征进行分析,证明装置具有多自由度调节和省力减载能力,结构稳定性强,建立在制动与氮气弹簧阻尼能力上的定点作业适应性好。
(2) 通过计算可知,合成运动机构具有2个转动自由度,可实现高空作业人员在不转换身体位姿的情况下对绝缘子串检具的灵活调整;铰接点处力的方向向下,装置替人体承担了部分载荷,可满足省力的需求。
(3) 仿真分析表明,过程铰点的位置靠近杠杆支座时能提高近线端的移动效率,远离杠杆支座时则有利于改善近线端工作平稳性;下弹簧铰点受力远大于上弹簧铰点,相应连接处需要设计加强结构,过程铰点类同。
(4) 现场测试证明,使用支撑装置操作更具有安全性、灵活性,可在绝缘子检修工作中推广应用。
| [1] |
杨益. 110 kV同塔多回线路带电作业技术研究[J]. 云南电力技术, 2015, 43(6): 87-90. DOI:10.3969/j.issn.1006-7345.2015.06.034 |
| [2] |
李如虎. 火花间隙检测劣质盘形瓷质绝缘子的方法探讨[J]. 贵州电力技术, 2017, 20(6): 19-20, 33. |
| [3] |
全国带电化作业标准化技术委员会.送电线路带电作业导则: DL/T 966-2005[S].北京: 中国电力出版社, 2006.
|
| [4] |
颜才升, 刘耀俊. 基于光纤电场传感器的劣化绝缘子检测方法[J]. 科学技术与工程, 2013, 13(36): 10922-10924. |
| [5] |
王丽. 体力活动能量消耗的测量方法及其应用[J]. 安徽医学, 2011, 32(6): 849-851. DOI:10.3969/j.issn.1000-0399.2011.06.063 |