 2020, Vol. 38
2020, Vol. 38 


变电站是电力系统输送电能的重要环节之一,变电站安全稳定运行至关重要[1-2]。变电站的日常运维直接影响电网的供电可靠性[3]。运行人员的巡检、维护工作任务繁重,主要存在两个难题,一是特殊巡视、事故状态(如设备疑似异常)下在对设备的巡视检查和紧急处理(如清除设备搭挂异物)过程中存在人身安全风险,缺陷验收存在死角,绝缘工器具搬运和保管存在隐患;二是各种巡视、操作、事故处理、设备维护、缺陷验收等记录需手动录入,消耗了运行人员大量的时间和精力。
对于巡检工作中存在的难题,目前国内外尚无很好的解决方案。自2003—2016年,巴西、新西兰、加拿大等国家研制了悬挂式移动和全地形变电站巡检机器人等,主要实现设备巡视和检查[4-5],或进行简单的操作[6-7]。随着自动化水平的不断提升,我国在变电站智能巡检方面有了飞速发展[8-13],大量的智能机器人研制成功并投运于各变电站,具有设备巡检、红外测温、缺陷告警等功能,但不能实现对变电设备的维护和智能录入,无法满足变电站的生产运维现状。对此,本文制了一种变电运维移动作业平台,为运行人员提供安全、智能、高效的巡检方案,为变电站运维工作提供新的发展方向。
1 变电运维移动作业平台简介变电运维移动作业平台主要由360°全景摄像头、温控式工具存放舱、全地形履带底盘、高精度激光雷达等构成,其外观图如图 1所示。

|
图 1 变电运维移动作业平台外观 |
自动导航底盘由全地形履带底盘和自动导航系统组成,起到承载设备和自动导航移动的作用。
(1)全地形履带底盘采用双履带橡胶式底盘结构(见图 2),具备移动、行走、转向功能,采用蓄电池供电,能够自动充电,上部承载存放舱、机械臂、摄像头和测温装置等。双履带(橡胶)结构具有极强的越沟和越障能力,最大可跨越500 mm宽壕沟,爬越150 mm高障碍,涉水深度达200 mm,相比于传统的四轮驱动机器人[4],更适用于地形复杂、恶劣环境中的变电运维工作。

|
图 2 全地形履带底盘 |
(2)自动导航系统使用激光雷达与IMU(惯性测量单元)相融合的导航技术。不受强电磁环境影响,定位精度高、可灵活避障。根据后台规划的行走路径及任务,按照指定路线行走并完成相应任务。通过通信模块与后台实时连接进行远程遥控。必要时可由主控室的值班人员手动控制,完成临时性、突发性的工作任务。
1.1.2 多功能机械臂多功能机械臂包含机械臂本体、夹具和控制柜。机械臂本体为关节式手臂结构(见图 3),由绝缘材料制成,可折叠,最大高度小于400 mm。手臂末端轴部和底座可安装12倍焦距星光摄像头和多用途连接工具。根据摄像头传递的图像,可实现监控和远程除异物同步进行。

|
图 3 多功能机械臂 |
温控式工具存放舱安装于履带底盘的后部,由安全环保材料制成。存放舱内部的温湿度可自动控制,温度控制在-30~50 ℃,相对湿度控制在60%以下,符合安全工具存放标准[14]。工具舱设有专用存放货架及缓冲固定装置。货架采用积木式设计,工具放置空间可灵活调整,采用上掀门设计,温控式工具存放平面图如图 4所示。

|
图 4 温控式工具存放舱平面图 |
全景虚拟现实(VR)巡视系统包含360°全景高清摄像头和VR一体化虚拟现实3D眼镜,以及无线图传发射和接收设备。360°全景高清摄像头安装在移动作业车顶部,搭配电动升降杆实现升降功能。VR全景技术实时采集周围的信息,并在后台实时生成动态环境球,通过无线方式传输给监控人员的头带VR设备,设备中的陀螺仪可以让使用者快速找到巡视中需要关注的设备。该系统具有语音提醒、全景观测、3D环物展示、追溯不同时间段的VR全景视频和离线全景包等功能。无线图传设备可实现大范围无线网络覆盖和户外点对多点远距离无线通信,最高数据传输速率可达300 Mbit/s。
1.1.5 双光源测温设备双光源测温设备具有智能红外成像和可见光遥视功能,既可人工操作设备进行检测,也可自动采集红外测温数据,形成红外测温检测报告。双光源测温设备支持全局高低温追踪,具有点、线、矩形、圆、椭圆、多边形等多种测温模式。所有测温对象可独立设置报警阈值范围。该设备同时具有采样周期功能,可绘制历史温度曲线图。
1.1.6 跨步电压感应器跨步电压感应器安装在履带底盘的底部,能够监测据移动平台8 m范围内的带电体情况。当有接地事故发生时,可提前发出告警信息,满足电力安全工作规程中有关设备接地的相关规定[15],保障了变电站运维工作人员的人身安全。
1.2 变电运维软件平台 1.2.1 移动式软件平台移动式软件平台包含软件平台载体、平台功能模块以及平台信息安全设计。
(1)软件平台载体是可移动平板,通过移动端内置作业标准并且形成任务计划,在移动端完成相关作业“一键”上传至后台。运维人员也可手持移动平板,在变电站进行人工巡视,录制的视频和图片可实时上传至后台,无需手动录入巡视记录。
(2)平台功能模块包含5大巡视、设备维护、倒闸操作、设备监测与缺陷管理,其结构见图 5。

|
图 5 平台功能模块结构图 |
(3)平台信息安全设计主要是建立信息加密安全系统,防止网络攻击和误操作事件,从而满足管理信息系统安全防范技术要求的相关规定[16]。
1.2.2 智能化辅助巡视系统和交互系统智能化辅助巡视系统可实现人工控制或智能测温,可用工控机对所有测温点进行详细记录,并对未测到温的设备进行提醒;交互系统将变电站现场设备的运行状况与主控室的后台相联系,运行人员可根据设备的实时图像,通过控制移动作业车完成对变电设备的实时监测和维护操作。
2 性能分析 2.1 实现远程自动化运维变电运维移动作业平台以自动导航底盘为基础,平台可在特定环境下通过人工远程控制完成操作任务,如清除变电站围栏异物或清理地面障碍物等。内蒙古地区地域辽阔,各变电站之间距离较远,在大风等恶劣天气时,需清除设备区白色垃圾等异物,而位于变电运维移动作业平台主控站的运行人员通过远程控制即可清除子站设备区的异物,从而节省了大量的人力、物力,保证了设备的安全运行。
2.2 实现便捷运输和安全保管工器具作业平台后部安装的温控式工具存放舱,具有便捷运输和安全保管工器具的性能。存放的工器具可自动运输至作业地点,减轻了作业人员的工作强度。专用存放货架及缓冲固定装置可有效解决变电站运行人员以往使用电动三轮车或手持搬运时易发生碰撞和摩擦的问题,避免了绝缘工器具的损坏。
倒闸操作过程中,运行人员易将验电器、拉闸杆等放置于地面,在地面潮湿时,会降低绝缘工器具的安全性能。而工具存放舱的温湿度可自动控制,从而保证了绝缘工器具的安全性能,以及运行人员的人身安全。
2.3 实现智能巡视和人工巡视相结合平台搭载的智能化辅助巡视系统和交互系统,将智能巡视和人工巡视相结合。智能巡检时,由操作人员选定巡视内容并启动,自主完成巡检任务,也可根据全景VR系统传输的远程视频,进行人工实时巡检,从而弥补了传统巡检机器人只能按照系统设定的固定寻检路径巡视,缺少符合现场实际工况巡检方式的不足。智能巡视和人工巡视相结合,增强了变电站的实时监控能力,实现了全站所有设备测温采点,有利于运行人员对现场设备实际运行状况的把握,以及对突发事件的应对。
2.4 实现自动化采集及运维数据分析变电运维移动作业平台开发的移动式软件平台,可自动采集并分析各项运维数据。移动作业车和移动平板采集巡视信息,并“一键”上传至后台端进行统计和分析。软件平台5大功能模块设置,完全满足变电站日常运维的记录管理需求,解决了传统人工手动录入耗费大量时间和精力的难题。
3 变电站测试 3.1 远程自动化运维测试(1)机械臂清除垃圾测试。为检验多功能机械臂清除垃圾的灵敏度、准确度及可控性等,在运维平台制造基地进行了清除垃圾测试试验(见图 6)。试验结果显示,多功能机械臂能够灵活地拾起垃圾,并可通过远程控制放置于指定地点,其准确度和可控性满足变电站现场清除垃圾的需求。

|
图 6 机械臂清除垃圾 |
(2)机械臂操作开关测试。为检验多功能机械臂辅助作业的性能,对其进行了操作开关的测试试验(见图 7)。试验结果显示,多功能机械臂能够在远程控制方式下接通或断开开关,其可靠性和可控性满足变电站现场辅助作业的要求。

|
图 7 机械臂操作开关 |
为检验温控式工具存放舱安全保管绝缘工器具的性能,在220 kV古城变电站进行了极端气候下的测试试验。试验时控制移动作业平台,使其在设备区以4.5 m/s的速度快速行驶,室外温度为-30 ℃,相对湿度为70%。试验结果显示,绝缘工器具外形丝毫无损,表面干燥,功能完好,符合存放标准[14]。
3.3 智能巡视测试(1)雪地巡检测试。为检验移动作业平台在变电站现场的巡检能力,在220 kV古城变电站进行了雪地巡检测试试验(见图 8)。试验时启动移动作业平台的智能巡检模式,使其在220 kV设备区的雪地上巡视。试验结果显示,全地形履带底盘更适用于严寒、雪地等复杂地形的巡检作业,比传统的四轮驱动机器人具有更强的越沟和越障能力[4]。此外,自动导航系统使其定位精度高、避障灵活,满足变电站智能巡检的要求,对比分析结果见表 1。

|
图 8 移动作业平台雪地巡检 |
| 表 1 移动作业平台雪地巡检对比分析 |

(2)测温功能测试。为检验双光源测温的准确率,在运维平台制造基地和变电站现场分别进行设备测温功能测试试验(见图 9),试验结果见表 2。结果显示,双光源测温满足全站设备测温采点的需求。

|
图 9 双光源测温图片 |
| 表 2 红外测温准确率试验结果 |

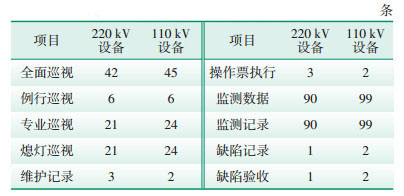
为检验软件平台自动化采集、分析运维数据的性能,在变电站现场进行了测试试验。试验时将全景VR摄像头和双光源测温设备传输的220 kV和110 kV设备景象,“一键”上传至后台端,并进行统计和分析。试验结果显示,软件平台输出的运维记录符合变电站标准化管理的相关规定,满足变电运维智能采集和录入记录的需求,试验结果见表 3。
| 表 3 软件平台输出记录结果统计 |
变电运维移动作业平台具有远程自动化运维、便捷运输和安全保管工器具、智能巡视和人工巡视相结合、自动化采集及分析运维数据的性能,不仅消除了变电站运行人员紧急巡视和处理作业时的人身安全隐患,理清了缺陷验收死角,保证了绝缘工器具搬运和保管过程的安全性,而且解决了变电站运行人员以往手动录入数十种记录消耗大量时间和精力的难题。相比于传统的智能巡检模式,变电运维移动作业平台的远程遥控运维模式能够实现主控站对子站的运行维护,测试取得了良好的效果,达到一定的实用化水平,是今后变电站运维工作新的发展方向。
| [1] |
浦天骄, 乔骥, 韩笑, 等. 人工智能技术在电力设备运维检修中的研究及应用[J]. 高电压技术, 2020, 46(2): 369-383. |
| [2] |
蔚然, 戚琳, 戚矛, 等. 智能机器人巡检系统在500 kV文都变的应用[J]. 电工技术, 2014, 1(6): 9-10. DOI:10.3969/j.issn.1002-1388.2014.06.005 |
| [3] |
彭向阳, 金亮, 王锐, 等. 变电站机器人智能巡检技术及应用效果[J]. 高压电器, 2019, 55(4): 223-232. |
| [4] |
蔡焕青, 邵瑰玮, 胡霁, 等. 变电站巡检机器人应用现状和主要性能指标分析[J]. 电测与仪表, 2017, 54(14): 117-123. DOI:10.3969/j.issn.1001-1390.2017.14.019 |
| [5] |
GUO R, LI B, SUN Y, et al. A patrol robot for electric power substation[J]. Proc. of the International Conference on Mechatronics and Automation (ICMA), 2009, 55-59. |
| [6] |
ALLAN J F, BEAUDRY J. Robotic systems applied to power substations-A state-of-the-art survey[C]//Applied Robotics for the Power Industry. Foz do Iguassu, Brazil: IEEE, 2014: 1-6.
|
| [7] |
黄山, 吴振升, 任志刚, 等. 电力智能巡检机器人研究综述[J]. 电测与仪表, 2020, 57(2): 26-38. |
| [8] |
周立辉, 张永生, 孙勇, 等. 智能变电站巡检机器人研制及应用[J]. 电力系统自动化, 2011, 35(19): 85-88. |
| [9] |
张志飞.变电站机器人智能巡检系统应用研究[D].北京: 华北电力大学, 2015.
|
| [10] |
王少博.变电站智能机器人巡检系统的研究与应用[D].北京: 华北电力大学, 2016.
|
| [11] |
钱平, 徐衔明, 张永, 等. 变电站巡检机器人监控系统实现技术与应用功能设计[J]. 电力信息与通信技术, 2017, 15(12): 19-24. |
| [12] |
鲁守银, 张营, 李建详, 等. 移动机器人在高压变电站中的应用[J]. 高电压技术, 2017, 43(1): 276-284. |
| [13] |
王刘旺, 周自强, 林龙, 等. 人工智能在变电站运维管理中的应用综述[J]. 高电压技术, 2020, 46(1): 1-13. |
| [14] |
国网北京电力建设研究院.电气设备交接试验标准: GB 50150-2016[S].北京: 中国计划出版社, 2016.
|
| [15] |
国家电网公司.电力安全工作规程(变电部分): Q/GDW 1799.1-2013[S].北京: 中国电力出版社, 2013.
|
| [16] |
国家电网公司.管理信息系统安全防护技术要求: Q/GDW 1594-2014[S].北京: 中国电力出版社, 2014.
|