 2020, Vol. 38
2020, Vol. 38 


架空高压输电线路巡检与故障排除是保障线路安全稳定运行的常规作业内容[1]。目前,这类作业仍然以人工方式为主,高空与地面间的重物输送工作不仅劳动强度大、危险性高,单次维修时间长,人力资源消耗量大,尤其在地形较复杂的情况下,实施难度将大大增加。利用现代科学技术手段,研制具有载重爬绳功能的机器人,已成为解决这一重要课题的有效方法[1-3]。
文献[4]设计了无线遥控液压爬行机器人,无线遥控系统的可靠遥控距离达80 m,属国内领先。文献[5]应用TRIZ理论的动态化原理设计了新型翻转攀爬机器人,解决了以往杆状物爬行机器人适应性较差的问题。文献[6]设计了一种新型缆索机器人,采用PLC控制机器人沿缆索上下运动。文献[7]设计了一种可实现自动在线除冰的机器人,利用视觉传感器为主要传感器的视觉控制方法,实现对工作环境的感知和识别,并引导和控制机器人完成在线行走及越障动作。文献[8]设计了一种抓绳机构,绳索沿导向块缠绕在抓绳轮上,通过两者间的作用力实现抓绳轮沿绳的运动。文献[9]利用电磁融合和视觉导航,融合自适应位置型PID控制算法及模糊控制,实现了巡检机器人行走的良好控制。虽然国内开展的类似研究项目有许多,但应用于环境条件复杂,方便高压输电线路且具有小体积、大负荷及远程无线控制功能方面的爬绳载重机器人的研究相对较少。本文开发的适应于架空高压输电线路高空作业载重爬绳机器人的远距离无线控制系统,实现了对爬绳机器人的无线控制与工作参数的监测,可以完成高压线上和地面之间的工具、材料等安全输送,降低检修成本及高空作业人员的安全风险,提高检修效率。
1 系统结构与工作原理 1.1 系统结构该系统总体结构如图 1所示。核心控制单元采用STC12系统单片机对外围各功能模块进行管理与数据通信;电动机上行计数与电源电压检测模块分别采用单片机内部计数器和A/D转换器,实现当前机器人所在高度的计算和电源剩余能量的监测,共同控制机器人在电源能量不足的情况下自主返回地面;电动机温度监测系统采用热敏电阻实现电动机与减速器温度的实时监测,防止因温度过高而导致驱动部分损伤;驱动信号转换器将单片机主控系统发送的控制命令转换成电动机驱动器可以识别的电压信号,以驱动减速电动机执行上升、暂停与下降等动作。

|
图 1 系统结构示意图 |
另外,状态显示与报警模块通过LED灯与喇叭实现低压与高温报警功能;急停触电开关采用电磁式开关,用于检测机器人是否到达最高点,以控制上行禁止功能的启用与关闭;按键模块可控制机器人在穿线模式和正常模式间进行自由切换;红外测距模块通过采集离地高度信息以检测机器人是否到达地面;无线指令接收器被安装在机器人内部主控板上,用来接收远程控制信号;双路无线指令发送器分别配置给地面与高空作业人员,可同时向接收器发送上行、暂停与下行控制指令。
1.2 工作原理系统通电后,单片机主控系统首先完成系统初始化,检测电源电压、电动机温度及工作模式等。在穿线模式下,远程无线控制指令被屏蔽,控制系统控制减速电动机以较慢的速度正转,操作人员可在此模式下完成穿线操作。在正常模式下,控制系统可通过接收遥控器发送的控制信息控制减速电动机以较快的速度完成上行、暂停与下行等动作,同时对减速器温度、电源电压及最高点位置信号等进行实时监测。
在接收到上行命令时,首先检测最高点位置信号,若处于最高点,则忽略该命令,并控制减速电动机停转。若未处于最高点,则判断电源电压是否降低到安全值:小于安全电压值时,忽略该命令,并控制减速电动机反转,强制执行下行动作;大于安全电压值时,控制减速电动机正转,执行上行动作(机器人当前正在上行则忽略该命令,正在下行则暂停2 s后执行上行动作)。
在接收到下行命令时,若机器人当前正在下行,则直接忽略该命令。若正在上行,则先暂停2 s,然后控制减速电动机反转,执行下行动作。
若接收到暂停命令,则直接控制减速电动机停转。同时,机器人在上升或下降过程中,均会对电源电压和电动机温度进行实时监测,并根据设定的阈值执行相应的动作与报警提示。
2 无线控制系统电路设计该爬绳式重物自输送机器人的主控电路是完成无线控制命令接收、传感器电路信号采集、减速电动机运行状态控制与电动机转速控制的关键部分,主要由电源管理模块、单片机最小系统、继电器控制模块、传感器接口模块、转速控制模块与报警提示模块6部分组成,电路原理如图 2所示。

|
图 2 爬绳机器人无线主控电路原理图 |
图 2中JP1,U1,U2,C1—C4,R1—R3及D1组成了电源管理电路,其输入电源范围为DC 9~24 V,输出电压为双路5 V,分别为传感器电路和单片机控制电路提供电源。U3,R4,C5—C7,Y1及P2组成单片机最小系统,为该电路的主控系统部分。RE⁃ LAY1,RELAY2,DIR_CH,S_S及D7—D8组成了继电器控制电路,主要用于向减速电动机驱动器发送正反转与启停控制信号。P1,S_KEY,LASER及FUN_C分别为无线接收模块、电磁式触发开关、红外测距传感器及模式选择按键的接口电路,实现单片机最小系统与外部各功能模块间的连接与通信。R5—R7,PT1000组成分压电路分别用来对电源电压和电动机温度进行转换,并利用单片机内部的A/D转换器完成数据采集。U4及SPEED_C组成减速电动机转速控制电路,该模块采用数字电位器X9131输出可控的驱动电压,控制减速电动机驱动器调节减速电动机的转速。R8—R12,D2—D6组成了工作状态与报警提示电路,用来指示机器人的运行状态及低压、高温报警等。
3 系统综合测试与结果分析 3.1 无线通信距离测试无线收发模块的理论通信距离为120 m,但在应用过程中,由于各类信号的干扰和障碍物的遮挡等原因,导致系统通信距离有所缩短[10-12],因此需要对其有效通信距离进行测试。测试时,机器人始终处于正常模式下,保持机器人位置不变,改变遥控器位置,每移动10 m连续发送控制信号100次(上行与暂停或下行与暂停),记录执行器错误执行或不执行的次数。测试结果见表 1。
| 表 1 无线模块通信距离测试数据 |
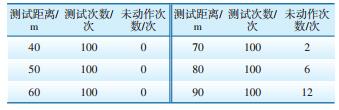
由表 1可知,随着遥控器与接收器间距离的增大,无线接收器未能正确接收控制信号的次数逐渐增多,当通信距离小于60 m时,接收器工作状态良好,未发生信号丢失现象,即系统的单项有效通信距离不低于60 m。由于在实际应用过程中,地面各高空作业人员均可对机器人进行远程控制,故双向通信距离不低于120 m,满足高压输电线路的通信距离需求。
3.2 带载运行状况测试爬绳式重物自输送装置的载重能力、正常工作电压范围与减速器正常工作稳定范围等相关控制参数的确定,是验证系统设计是否满足要求的重要指标,因此需要在室外对整机带载运行状况进行综合测试。
试验前先对电池进行充电(电池电量充足时的电压为24.9 V),试验时天气状况良好、无风或微风,室外温度4~10 ℃,爬升高度为30 m,机器人载质量30 kg,保持机器人沿绳索连续上下移动。当机器人行至最高点时,改变行进方向,当机器人运行至地面时,测量电源剩余电量和电动机减速器温度;间隔2 min再次改变行进方向,如此重复直至电源电量不足以驱动电动机上行运转;同时记录机器人上下行的次数及每次上下行所需时间。室外综合测试过程与测试结果见表 2。
| 表 2 室外带载运行综合测试结果 |
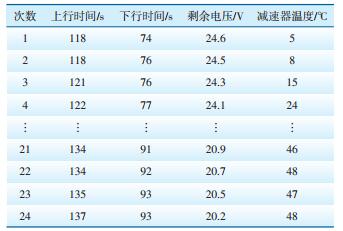
由表 2可见,随着运行次数的增加,上行时间、下行时间均呈递增变化,均有较大幅度的增加:上行时间由起始的118 s上升至137 s,下行时间由起始的74 s上升至93 s;减速器温度升高较为明显,由起始的5 ℃上升至48 ℃,但上升幅度随着运行次数的增加逐步变缓;电源电压则呈不断降低趋势,由起始的24.6 V降低至20.2 V。
后续在进行第25次试验过程中,机器人上行时间大幅增加,且无法运行到最高点,下行时间变化不大,减速器温度迅速升高至70 ℃以上,电源电压大幅下降至18 V以下。
综上可知,该爬绳式重物自输送装置在电压不低于20 V,减速器工作温度不超过60 ℃的情况下,在30 m高度范围内可稳定升降24次,升降距离均在700 m以上,系统工作稳定可靠,能够满足高压输电线路日常巡检需要。
另外,为防止电动机因过热而烧坏、减速器内部结构受损,程序设计过程中,设定当电源电压低于21 V时,低压指示灯闪烁,当电源电压低于20 V或减速器温度高于70 ℃时,控制系统将屏蔽无线控制命令,直接驱动电动机反转。
4 结语在爬绳式重物自输送装置基本功能的基础上,采用模块化软硬件系统设计方案,结合无线通信技术、电子技术与传感器技术,设计了具有远程无线控制和实时监测功能的智能控制系统,实现了机器人上行、暂停与下行动作的远程双向控制,能够对机器人各项工作参数进行实时监测,并具备了基本的智能控制功能。该系统的成功研制,为电网系统塔台建设、高压输电线路巡检作业提供了可靠的物资运载方式,可大大降低高空作业的工作量与危险性,有效缩短运送时间,提高工作效率,具有良好的推广价值。
| [1] |
马丛淦, 王闯, 杜觉晓, 等. 基于机器人技术远程输电巡视的研究与实践[J]. 电力安全技术, 2018, 20(11): 39-41. |
| [2] |
丁思奎, 李健. 变电站巡检机器人在实际应用中存在的问题分析及解决方案[J]. 供用电, 2016(1): 80-82. |
| [3] |
韩冰, 尚方. 面向无人机输电线路巡检的电力杆塔检测框架模型[J]. 浙江电力, 2016, 35(4): 6-11. |
| [4] |
邬建中, 阮佳梦. 无线遥控液压爬行机器人的设计[J]. 中国工程机械学报, 2006, 17(4): 19-21. |
| [5] |
石先杰, 史冬岩, 邓波, 等. 基于TRIZ理论的攀爬机器人创新设计[J]. 应用科技, 2011, 38(3): 61-64. |
| [6] |
贾黎明. 带源式缆索检测机器人方案介绍[J]. 企业技术开发, 2012, 31(13): 35-36. |
| [7] |
曹文明.高压输电线路除冰机器人视觉控制方法研究[D].长沙: 湖南大学, 2014.
|
| [8] |
娄雪峰, 毕树生, 马宏伟, 等. 一种爬升机器人爬行机构的设计[J]. 机械传动, 2014, 38(4): 71-74. |
| [9] |
祖丽楠, 张强, 梁静, 等. 变电站巡检机器人导航方法研究[J]. 科学技术与工程, 2016, 14(9): 198-201. |
| [10] |
韦舒天, 李龙, 岳灵平, 等. 输电通道人机协同巡检方式的探索[J]. 浙江电力, 2016, 35(3): 10-13. |
| [11] |
郑晓琼, 王鹏辉. 智能巡检机器人在变电站的应用[J]. 电力安全技术, 2016, 18(11): 56-58. |
| [12] |
刘越凡, 叶海彬, 刘凯. 巡检机器人在500 kV无人值守变电站的应用研究[J]. 供用电, 2016(9): 69-72. |