 2020, Vol. 38
2020, Vol. 38 



电力系统中,随着电压等级的不断提高,输电线路的巡线作业对保障区域电网的安全、稳定及高效运行越来越重要[1-2]。传统的人工巡线方法工作量大且作业条件艰苦,甚至还有一些区域线路和巡检项目现在还难以开展人工巡查。目前,无人机线路巡检虽已在电力系统得到普遍应用[3-6],但受民用无人机通信距离短的限制(往往不足20 km),应用范围大大缩小。而利用数据链技术可解决无人机远距离通信问题,结合无人机巡航能力的提升,能够满足各种远距离巡线应用场景的需要,实现提升巡线安全及工作效率、降低运维成本的目的[7-8]。
本文根据内蒙古地区地形特点,选取鄂尔多斯地区多个地点作为测试点,通过实测值比较和计算推演,证明无人机超远距离数据链通信距离可达150 km,在此距离范围内可以实时传输高清视频等数据。
1 超远距离数据链实现的可行性评估无线电波(直达波或自由空间波、地波或表面波、对流层反射波、电离层波)可通过多种方式从发射天线传播到接收天线[9]。对于无人机远距离数据链通信来说,由于无人机可以升高,具备良好的视距条件,因此可以采用自由空间传播方式来评估无线链路性能。无人机远距离通信数据链采用主链和副链两种模式,需要对这两种模式分别进行评估,以确认是否满足通信要求。
1.1 主链主链按照2.5 Mbit/s物理层速率、QPSK1/2调制编码进行链路计算。机载天线增益-2 dBi,地面定向天线增益20 dBi,载波频率1500 MHz,计算结果见表 1。
| 表 1 主链计算结果 |

表 1可见,对于主链模式,在150 km处以2 Mbit/s速率进行通信时,系统具备10 dB以上的余量,理论上满足指标要求。
1.2 副链副链按照1 Gbit/s的物理层速率,QPSK1/2调制编码,进行链路计算。机载天线增益-2 dBi,地面全向天线增益8 dBi,载波频率1500 MHz,计算结果见表 2。
| 表 2 副链计算结果 |
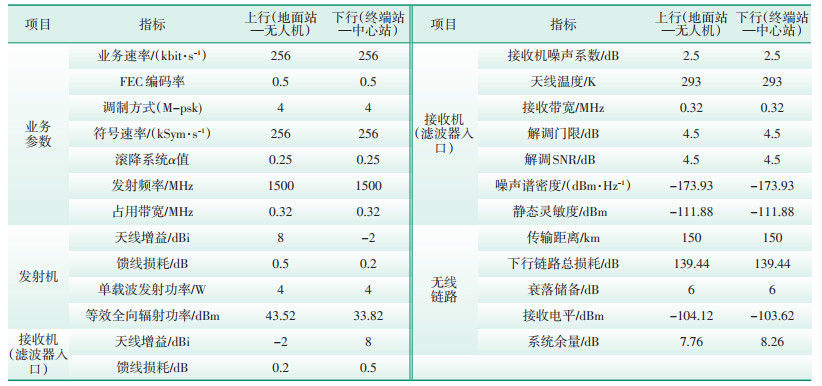
表 2可见,对于副链模式,在150 km处以100 kbit/s速率进行通信,系统具备7 dB以上的余量,理论上满足指标要求。
2 无人机数据链路的建立 2.1 无人机数据链路设计方案数据链通信示意图如图 1所示。数据链地面终端由主(副)链通信模块、伺服控制模块、视频处理模块、吊舱控制接口模块等组成,完成对数据链地面站的链路监控和天线控制,实现业务数据接口、天线控制接口和通信模块接口等之间的数据交换,所有的交换均基于网口。

|
图 1 数据链通信示意图 |
数据链的操作控制在PC机上完成,通过综合控制单元,实现对数据链地面站的配置管理。数据链地面终端配置全向地面天线、定向天线各1套,在无线链路设计上,副链保持较高的链路增益,并且没有方向性,不依赖于无人机的位置;而主链需要采用定向跟踪天线来提高链路增益,实现宽带任务信息的传输,跟踪天线需要知道无人机的位置,以保持天线波束指向无人机方向。
2.2 数据链机载单元的连接无人机远距离通信数据链机载单元由视频编码模块和数据链通信模块组成,视频编码模块和外部视频传感器接口(如光电吊舱),采用H.265视频协议,实现实时采集视频数据的压缩。
数据链机载单元的连接如图 2所示。飞控板是飞机控制单元,飞控数据通过232接口与数据链通信模块连接,光电吊舱用来采集图像视频数据,其控制信号通过422接口与数据链通信模块连接,视频通过数字分量串行接口(SDI)送至视频编码模块,视频编码模块将编码后的数据通过网口将视频数据传送至数据链,同时串口用来与数据链模块连接实现数据控制,数据链通信模块用来与地面站通信。为了保证传输的可靠性,数据链通信模块支持两种工作模式,即主链模式和副链模式。

|
图 2 数据链机载单元的连接 |
(1)机载主链模式,宽带TDD的从机通信模式,上行25.6 kbit/s、下行4 Mbit/s。
(2)机载副链模式,窄带TDD的从机通信模式,上行25.6 kbit/s、下行25.6 kbit/s。
无人机启动时工作在数据链副链,通过全向天线建立通信。无人机进入巡航状态后、地面终端的主链跟踪到无人机后,数据链转换至主链模式。当主链工作中断(心跳计数)时,降级到副链工作。副链工作时,数据链机载单元需要周期性地在主链信道上发送数据以检测主链信道,当主链信道恢复后,切换至主链工作。
2.3 数据链地面终端的连接数据链地面终端内部包括1个数据链综合控制单元,实现对数据链地面站的链路监控及天线控制,同时还实现业务数据接口、天线控制接口和通信模块接口等之间的数据交换,所有的交换均基于网口。数据链综合控制单元由2块综合板通过网口背靠背连接组成。数据链的操作控制在PC机上完成,通过综合控制单元,实现对数据链地面站的配置管理。数据链地面终端的连接示意图如图 3所示。

|
图 3 数据链地面终端的连接 |
数据链地面站配置1套全向地面天线和4套定向天线。全向天线的通信模块开机即被配置为副链,定向天线的通信模块则配置为主链模式。副链保持较高的链路增益,并且没有方向性,不依赖于无人机的位置,可以实现同时与4架无人机通信,传送控制信息。主链需要采用定向跟踪天线来提高链路增益,实现宽带任务信息的传输,跟踪天线需要知道无人机的位置,以保持天线波束指向无人机方向。每套定向天线只跟踪1架无人机,传送控制信息和任务信息。
2.4 数据链通信模块工作方式 2.4.1 机载模式机载模式数据链通信模块如图 4所示。模块由4个单板和1个腔体滤波器组成。基带板上主要为MCU、FPGA、AHA4540和AD9364及其外围器件,实现基带信号处理。微控制单元(MCU)提供1路网口,作为业务和配置复用的接口。MCU提供4路串口,其中RS232和RS422各1路,在作为机载单元使用时,分别连接到飞控板和光电吊舱,MCU将这两个串口的数据打包成以太网数据包发送到空口,在地面使用时,这两个串口不使用。MCU提供1路TTL串口,在机载单元使用时,提供给视频编码板。MCU提供1路RS232串口作为单板调试使用。基带板上现场可编程门阵列(FPGA)主要用于空口信号处理。FPGA连接1个RS422接口,在机载使用时,用以输出RS422串口,在地面使用时则输出或输入同步信号。电源板上设置了多个DC/DC变换器为通信模块单个单板供电。射频单板包括功率放大器、低噪声放大器和收发开关。滤波器实现对天线信号的滤波和带外抑制。数据链机载单元除通信模块,还包括了视频编码板。视频编码板通过板间插座硬连接,连接到基带板的电源和网口上。

|
图 4 数据链通信模块(机载) |
地面模式数据链通信模块如图 5所示。模块由3个单板和1个腔体滤波器组成。基带板上主要为MCU、FPGA、AHA4540和AD9364及其外围器件,实现基带信号处理。FPGA连接1个RS422接口,在机载使用时,用以输出RS422串口,在地面使用时则输出或输入同步信号。电源板上包含多个DC/DC变换器,可为通信模块单个单板供电。射频单板包含功率放大器、低噪声放大器和收发开关。滤波器实现对天线信号的滤波和带外抑制。

|
图 5 数据链通信模块(地面) |
2019年11月,在内蒙古自治区鄂尔多斯市境内对无人机超远距离数据链通信进行了测试。
3.1 测试环境天气:晴;风力:3级;温度:-18 ℃;测试距离:80 km。地面站测试场地:鄂尔多斯康巴什地区M大楼楼顶;无人机现场测试场地:鄂尔多斯杭锦旗境内空旷地点。
3.2 测试设备PC电脑2台,无人机1架,机载站1套,全向天线1套,地面站1套,定向天线1套。
3.3 软件环境操作系统:Windows7以上;测试工具(应用软件):VLC多媒体播放器,Putty超级终端,IE浏览器。
3.4 测试参数设置测试参数设置见表 3。
| 表 3 数据链通信模块(地面) |
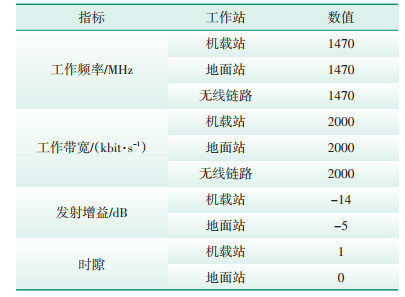
无人机最近距离按50 m,最远距离按150 km,链路动态范围按70 dB设置。上行动态范围,依靠机载单元接收通道提供-70 dB的AGC接收;下行动态范围,分别由机载单元发射通道实现功率控制40 dB,由地面终端接收通道实现30 dB的ADC动态。无人机根据接收到的上行RSSI值设置发射功率,当功率控制已经达到40 dB后,由地面终端接收机的ADC动态吸收,因此地面终端的ADC正常工作电平,应留出30 dB以上的ADC动态。
3.5 测试过程 3.5.1 无人机的操作控制地面控制站中的无人机操作控制台,通过网口发出IP封装的串行控制数据,IP的目的地址为综合控制单元内的数据链主控地址(综合板1上的CPU)。串行控制数据中需携带串口ID号。
综合控制单元内的数据链主控,解析串行控制数据中的串口ID,分别发送至副链地面站和相应的主链地面站,同时将串行控制数据封装到无线信道中,通过天线发送出去。数据链机载单元无论是在主链还是副链模式下,都可以接收到串行控制数据,并将其通过RS232接口发送至飞控板。
下行方向的通信流程相应地反向进行。飞控板通过RS232发出串行控制数据,串行控制数据中同样需携带串口ID号。无论数据链副链地面站还是相应的主链地面站接收口,都封装成IP数据发送至综合控制单元内的数据链主控地址,并由数据链主控单元发至相应的无人机操作控制台。
3.5.2 光电吊舱的操作控制光电吊舱的操作控制台接口为RS422,其发送的串行控制数据需要由综合控制单元内的接口转换(综合板2上的CPU)封装成IP数据,封装后的IP数据发送给数据链主控单元(综合板1上的CPU)。串行控制数据中需携带串口ID号。后续的通信过程与飞控通信类似。
3.5.3 光电吊舱视频信号下传光电吊舱通过SDI视频接口输出视频信号,至数据链机载单元上的视频编码板,编码板进行基于H.265压缩,通过IP数据包发送至数据链基带单元。基带单元将其封装到无线信道中,发送至数据链的主链地面站。
主链地面站接收到视频IP数据后,转发给相应的解码器,解码器将其还原成SDI视频信号,送至光电吊舱显示操作台、显示器或视频矩阵。
3.5.4 数据链的操作控制综合控制单元内的综合板1上的CPU,是数据链主控单元。数据链操作控制台,通过IP与数据链主控单元通信,实现对数据链的人机交互,完成数据链的配置及相应的状态显示。
数据链主控单元除了完成无人机操作控制、光电吊舱操作控制的数据转发,还要监控数据链本身的设备和信道状态,包括未加无人机的链路使用情况。无人机操作控制台需要周期性地将无人机的经纬度、高度发送至数据链主控单元,由数据链主控单元转发至相应的主链天线伺服控制器单元。相应的数据也采用串行控制数据并携带串口ID号。数据链主控单元应可以利用无人机的经纬度、高度,通过操作天线进行机械扫描,同时监测数据链通信模块的信号质量,进行定向天线波束偏差角度的校正[10-11]。
3.6 测试结果无人机拍摄画面截图见图 6。

|
图 6 数据链通信模块(地面) |
参数测试结果:
(1)副链技术指标:上行25.6 kbit/s,下行为25.6 kbit/s,满足飞控通信需求。
(2)主链技术指标:上行为25.6 kbit/s,下行为2 Mbit/s,满足高清视频回传需求。
(3)主副链通信距离:80 km,满足远距离巡线要求。
(4)无人机机载单元质量:小于3 kg,便于各种小型无人机携带。
3.7 通信距离测试和推算由于航空管制和军事管制,无人机飞行高度受到限制,本次测试距离为80 km,对于150 km传输链路采用数学推算方法进行证明。
要想达到理想的通信条件,需满足视距通信的要求,且在菲尼尔半径内没有遮挡物[12-14]。
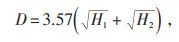
视距D的计算方法见公式(1):
|
(1) |
式中:H1—第1个天线的高度,m;
H2—第2个天线的高度,m。
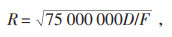
最大的菲尼尔半径R的计算方法见公式(2):
|
(2) |
式中:F—电磁波频率,Hz。
链路的预计算结果如表 4所示,可见在满足150 km的通信距离,而且是2 Mbit/s的空口带宽下,系统仍具有很大裕量。
| 表 4 链路的预计算结果 |

但现实中由于各种因素(如视距内天线高度不够,大气衍射,菲尼尔区域内的遮挡,频谱干扰等)的影响,实际测试环境不可能满足理想条件[15-16],为了推算出系统能够满足150 km、2 Mbit/s的通信能力,可以利用短距离的真实测试结果来反推长距离数据。
以50 km、2 Mbit/s作为系统信息传输能力推算的参考点,假设在50 km处通讯正常、没有误码,视频业务能够接通,此时获取的系统通信参数:机载站的发射功率为X,地面站接收的信噪比为Y。为了达到150 km的通信要求,经计算需要在此基础上将发射功率增加9.5 dB,或接收的信噪比恶化9.5 dB。不管系统通过何种方式来弥补因链路距离变化导致的信号衰减,只要不超过系统发射功率的极限,或者信号恶化到系统的正常解调门限即可。
本系统的最大发射功率为0 dBm,最低的信噪比要求为4.5 dB,依此计算,在50 km、2 Mbit/s测试中,当机载站的发射功率小于-9.5 dBm,或者地面站接收信号的信噪比大于14 dB,即可以推断出系统能够满足150 km、2 Mbit/s的通信要求。
4 结语本文提出的无人机超远距离数据链通信技术,实现了无人机超远距离通信,理论推算结果表明,无人机超远数据链路可以在150 km范围内实现视频、数据的实时回传,为输电线路远程巡视的实现提供了理论依据。
本文研究的技术采用无线电波作为传输媒介,因无线电波易受地形、天气、反射、折射等客观情况影响,无人机只有飞离地面一定高度才能实现通信链路的建立,通信距离越远,飞行高度就得越高,而输电线路距离地面的高度一般在100 m以下,如果不采用超高清摄像头则不易发现线路存在的隐患情况。基于此,下一步的研究方向为利用5G技术建立无人机远距离低空飞行通信链路,为电力线路巡视的常态化及电力应急抢险、电力设计勘查等工作提供多样、可靠的技术手段。
| [1] |
中国电力企业联合会.架空输电线路巡检系统: DL/T 1006-2006[S].北京: 中国电力出版社, 2007.
|
| [2] |
吴立远, 毕建刚, 常文治, 等. 配网架空输电线路无人机综合巡检技术[J]. 中国电力, 2018, 51(1): 97-101. |
| [3] |
吴维农, 杜海波, 袁野, 等. 输电线路无人机巡检实时通信技术研究[J]. 中国电力, 2016, 49(10): 111-113. |
| [4] |
光明, 鄂爱东, 钱凤阳, 等. 基于三维激光扫描技术的输电线路无人机巡检方法分析[J]. 内蒙古电力技术, 2019, 37(1): 21-24. |
| [5] |
彭向阳, 钱金菊, 麦晓明. 大型无人直升机电力线路全自动巡检技术及应用[J]. 南方电网技术, 2016, 10(2): 24-31, 76. |
| [6] |
吴云鹏, 臧伟, 韦晓初. 无人机在ADSS光缆线路施工中的应用研究[J]. 浙江电力, 2017, 36(5): 53-55, 61. |
| [7] |
杜宝舟, 陈亚洲, 高万峰, 等. 基于注入法的某型无人机数据链电磁效应研究[J]. 高电压技术, 2018, 44(10): 3322-3327. |
| [8] |
张叶峰, 杨宁.TD-LTE技术在电力无线通信系统中的应用[D].北京: 华北电力大学, 2015. http://d.wanfangdata.com.cn/Thesis/Y2879329
|
| [9] |
董晓虎, 程绳, 吴军, 等. 基于电磁场检测的输电线路无人机避障模块的设计及搭载方法研究[J]. 湖北电力, 2018, 42(5): 39-43. |
| [10] |
周宏辉, 汪从敏, 江炯, 等. 基于地理信息系统的输电线路无人机巡检管理平台研究与实现[J]. 浙江电力, 2018, 37(12): 32-37. |
| [11] |
刘典安. 输电线路无人机巡检作业管理系统[J]. 农村电气化, 2017(8): 46-47. |
| [12] |
周小红, 李向欢, 石蕾, 等. 无人机倾斜摄影技术在电力巡线树障检测中的实践应用研究[J]. 电力大数据, 2019, 22(8): 53-59. |
| [13] |
宋福根.基于输电线路电场分布特征的无人机巡检避障研究[D].福州: 福州大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10386-1018053482.htm
|
| [14] |
黄新波, 刘新慧, 张烨, 等. 基于红蓝色差和改进K-means算法的航拍绝缘子分类识别方法[J]. 高电压技术, 2018, 44(5): 1528-1534. |
| [15] |
曹浩楠, 王彬, 邹国平, 等. 基于输电线路电磁场分布的无人机测距适应性研究[J]. 浙江电力, 2019, 38(3): 65-70. |
| [16] |
张庭. 无人机巡检输电线路技术的应用探析[J]. 科技创新, 2018(3): 361. |