 2019, Vol. 37
2019, Vol. 37 

某电厂汽轮机为上海汽轮机厂设计制造的N1050-27/600/600型超超临界机组,配备艾默生过程控制有限公司提供的Ovation控制系统[1]。
汽轮机在运行过程中可根据实际运行工况选用初压模式和限压模式。初压模式下,压力控制器起作用,汽轮机主要控制主汽压力,锅炉侧控制负荷,一般用于中低负荷段运行调节,其负荷响应速度较慢。限压模式下,转速负荷控制器起作用,未并网时汽轮机主要控制转速,并网后汽轮机主要控制负荷,而主汽压力由锅炉控制,此模式下负荷响应速度快,可以满足电网调节的要求[2]。
2 扰动现象及过程分析2018-01-24T16:51,机组负荷893 MW,主汽压力23.3 MPa,机组处于锅炉主控模式,汽轮机处于初压模式,操作员发出协调请求指令,送至汽轮机数字电液控制系统(DEH),初压模式切换为限压模式。在切换过程中(大约1 s),机组两侧高压调节阀突然开大(由40%开至85%),负荷最高升至910 MW。
2.1 压力控制器分析图 1为压力控制器逻辑简图。压力控制器指令(YFDPR)和转速负荷控制器指令(YNPR)及启动装置控制器(TAB)输出取小得到小选后的流量指令(YR),经过高压调节阀特性曲线转换后直接控制高压调节阀的开度。

|
图 1 压力控制器逻辑简图 |
根据初压/限压切换逻辑对压力控制器进行分析。操作员发出协调请求CCS指令,脉冲3 s,触发复位SR触发器,将初压方式投入信号(VDENPR)复位为0,送至压力控制器,延时0.048 s后,将转速负荷控制器设定值偏置从0切换为-1 MPa,PID输出因设定值减少而相应增加,瞬间增加量为0.052(设定值改变量×比例增益=1/27 × 1.4=0.052)。之后压力控制器切为转速负荷控制器,当小选指令由负荷控制器输出时,压力控制器动作信号(FDPRIE)由1置为0,压力控制器被切除,YFDPR值为压力控制器输出基础上加0.08(图 1中为YR+0.08)。综上所述,在初压/限压切换过程中,压力控制器输出会阶跃上升,其值总增量约为0.132(0.052+0.08)。
2.2 转速/负荷控制器分析转速/负荷控制器逻辑见图 2。操作员发出协调请求CCS指令,脉冲3 s,触发复位SR触发器,将VDENPR复位为0,负荷设定值(NPR-W)瞬间收到-0.02的偏置并分为2路,1路经过PID,设定值减少0.02,由于负荷控制器输出瞬间只减少1个很小的值(设定值改变量×比例增益=-0.02 × 0.14=-0.0028),所以对调节阀的影响可以忽略;而另1路不经过PID,此值乘以0.8后直接叠加在转速负荷控制器出口,令YNPR减小0.016。

|
图 2 转速/负荷控制器逻辑简图 |
此外还有1路VDENPR信号复位为0,取非后经1 s脉冲信号,得到N350QP,此脉冲信号闭锁YNPR,即YNPR在1 s内保持脉冲信号上升瞬间的值,1 s后输出值切换为压力控制器输出限制PIRYU信号和转速负荷控制器PID出口值的小选值与一次调频分量(N410)之和。N350QP脉冲信号处于上升沿时,转速负荷控制器还未动作,此时汽轮机仍处于初压模式,以当时达到下限值为例进行说明。
因转速负荷控制器设定值× 8>0.08,即有:

|
根据逻辑图可知:

|
即:

|
当N350QP脉冲信号置1后,YNPR在此1 s内会保持当前值,而PRIYU=YR-N410,PIRYU瞬间减少0.08,YNPR也会突降0.08,并小于YFDPR,完成模式切换。NPRIE输出1时,表示完成初压到限压的切换,最终YNPR由转速负荷控制器计算控制[3-5]。
综合两路逻辑分析,可得到结论:在切换瞬间,YNPR会先下降0.016,保持1 s,最终下降0.08。
3 扰动原因此次切换与其他日常操作无明显区别,即操作员发出协调请求CCS指令,脉冲3 s,DEH接收信号,并立刻对YFDPR和YNPR做出调整,YFDPR上升,YNPR下降,在1 s后完成切换。但在此次切换过程中,YFDPR上升动作与YNPR的下降动作之间有大约1 s的间隔,造成YR上升、调节阀指令输出,调节阀开度瞬间达到80%,导致负荷波动。
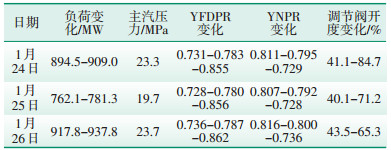
Ovation系统在历史站的数据记录中,采样周期为1 s,在没有事件顺序记录(SOE)点的情况下,对于不同站同1 s内数据仅凭历史站的记录无法判断其先后顺序,需要根据逻辑结合实际动作情况进行分析。本文采集了1月24日以来的初压/限压模式切换过程中3次调节阀开度发生明显变化的数据,见表 1和图 3。由图 3可以看到,在切换过程中调节阀开度发生了跳变,且开关调节阀时间小于1 s。根据数据及逻辑分析,可以得出2种可能性:YFDPR上升动作提前或YNPR下降动作滞后。只要切换中存在时间差,就必然会产生1个YR的波峰值,送至高压调节阀,令调节阀开度增大,导致负荷波动,切换则变成有扰切换。同时对压力控制器和转速负荷控制器逻辑页内时序进行检查,符合时序要求。
| 表 1 初压/限压切换过程中主要参数变化 |

|
图 3 负荷突变情况下的参数曲线 |
可选择2种方法消除汽轮机模式切换引起的负荷波动问题。
(1)将转速/负荷控制器动作时间提前。根据转速负荷控制器分析,若要提前动作,可将脉冲时间缩短,但由于其中逻辑动作较多,难以定量地减少时间,因此不建议采用此方法。
(2)将压力控制器动作时间延迟。检查压力控制器逻辑,VDENPR复位为0后有0.048 s延时,小于扫描周期[1](逻辑扫描周期为0.05 s),难以被扫描到,其延时不起作用,建议增加1个扫描周期(实际改为0.098 s),即可有效延迟压力控制器指令动作。
按照上述方法对压力控制器逻辑中延时块进行更改后,记录初压/限压切换的主要参数,其切换过程中高中压调节阀平稳无动作,切换过程参数曲线如图 4所示。以1月24日16:00的切换过程为例分析负荷波动时的参数曲线(图 3),操作员发出协调请求CCS指令,YFDPR由0.731升到0.783(增加了0.052,符合压力控制器推论)并维持了不到1 s时间,此时YNPR由0.811下降到0.795,未完成切换,但是YR随着YFDPR的上升也升至0.783,经过逻辑计算后调节阀开度为84.75%,之后由于1 s的保持时间结束,YNPR下降0.08,小于YFDPR,最终完成初压/限压切换,同时调节阀指令恢复正常。

|
图 4 正常模式切换过程的参数曲线 |
对比图 3和图 4,可以发现图 4中YFDPR上升的时间有延迟,切换过程中YFDPR第1次上升的0.052未被采集,直接跳过这个节点增加了0.13,根据压力控制器逻辑分析可知,图 3中VDENPR信号先到,而FDPIRE后动作;而图 4无扰切换的情况下正好相反,FDPIRE先动作,VDENPR后到,YFDPR一次性上升0.13,从而实现了初压/限压模式的无扰切换,其中延时时间起到了关键的作用。
5 结束语经分析,某电厂对汽轮机初压/限压切换过程中发生扰动的主要原因为压力控制器指令上升和转速负荷控制器指令下降瞬间有短暂的时间间隔,造成高压调节阀指令上升。对压力控制器逻辑中延时块进行更改后,问题得到解决。处理方法可为类似现象提供借鉴。
| [1] |
艾默生过程控制有限公司. Ovation算法手册OW350_R1100[M]. 上海: 艾默生过程控制有限公司, 2008.
|
| [2] |
秦宁, 任仲海, 丁湧, 等. 西门子二次再热机组限压/初压切换过程典型故障分析[J]. 广西电力, 2016, 39(5): 61-63. |
| [3] |
文群英, 潘汪杰. 控制设备系统及运行[M]. 北京: 中国电力出版社, 2011.
|
| [4] |
包景华, 黄勇. 1000MW超超临界机组汽轮机DEH调试简介[J]. 热力透平, 2008, 37(4): 67-69. |
| [5] |
胡念苏. 汽轮机设备系统运行[M]. 北京: 中国电力出版社, 2010.
|