 2019, Vol. 37
2019, Vol. 37 

输电线路是电能输送的载体,也是电网中不可或缺的一部分。国际咨询机构GlobalData在2015年发布的报告中指出,2020年,中国输电线路总里程将从2014年的115万km增加至159万km以上。这意味着中国输电线路建设的年复合增长率将达到6%,高于全球3%的增速[1]。在这种建设速度和模式下,电网稳定性、供电设备可靠性和线路巡检困难性等一系列问题成为社会关注的焦点。
人工巡检方式下,1名巡检员1 d一般能够完成8—10基杆塔的巡检工作,在云南、四川等偏远山区,1 d最多只能巡检2基杆塔,劳动强度大,巡检效率低。而利用无人机进行线路巡检,只需1 h便可完成人工1 d的巡检量,巡检效率高,且巡检成本低,能够避免人身安全事故的发生。因此,无人机在输电线路巡检工作中的应用越来越多,具备各种功能和特点的无人机也应运而生。为使无人机在线路巡检工作中得到更好的应用,进一步完善其巡检方法尤为重要。
1 输电线路巡检中无人机应用现状现阶段,我国从事无人机行业的单位有300多家,已形成研发、制造、销售和服务体系配套齐全的有160家左右。《2017—2022年中国多轴无人机行业发展前景分析及发展策略研究报告》表明,我国研制投入使用的无人机型多达百余种,小型无人机技术已逐步完善,预计到2020年中国无人机年销量将达到29万架[2]。
无人机基于可见光及红外热像仪等设备对输电线路开展巡检工作。据统计,应用无人机进行缺陷识别,检测出的杆塔瓶口及以上位置且人工巡检难以发现的缺陷占总缺陷的78.5%。在降低劳动强度的同时,设备巡检效率和质量显著提高,电力设备状态运行维护能力也相应提高。
目前,国家电网公司已将无人机巡检作业纳入输电线路精益化考核指标中。截至2017年年底,国家电网公司共配有各类型无人机1800余架。2017年无人机累计巡检杆塔超过21万基,发现缺陷5万余处。按照缺陷位置划分,以杆塔瓶口及以上位置线路设备及附属设施缺陷为主,占75.8%;按照缺陷等级划分,以一般缺陷为主,占87.2%;按照缺陷类型划分,以金具类缺陷为主,占42.7%。无人机巡检已成为输电线路运维不可或缺的手段[3]。
2 无人机巡检方法及存在的问题在输电线路巡检工作中,固定翼无人机多用于线路通道走廊巡视,其工作原理如下:由地面站给定巡视坐标位置和路线,通过电池适用航时确定降落点,并设置拍照频率后,开展线路走廊巡视。但由于固定翼无人机飞行速度较快,存在部分抓拍照片不清晰的问题,且受起降场地限制,灵活性较差。多旋翼无人机是通过装设的红外测温仪和高清摄像机定点悬停拍摄杆塔照片完成巡检工作,主要拍摄的检查点为线路金具、绝缘子及绝缘子串、附属设施、杆塔本体等。由于多旋翼无人机需要操作人员进行精准操作,对操作人员的操作技能要求较高,无法保证巡检质量。2种机型无人机在完成巡检任务后,将机载检测设备中的图像导入地面站系统,并对图像与杆塔各部位逐一进行匹配,按照杆塔对应部位进行图像命名,再由图像分析子模块对各部位图像进行智能分析,及时发现缺陷,并生成缺陷报告[4]。
3 基于三维激光扫描技术的无人机巡检分析 3.1 三维激光扫描系统利用多旋翼无人机搭载三维激光扫描系统,以杆塔为中心,通过激光系统、GPS、空中测量平台、IMU/INS及数码相机等技术应用,实现杆塔全方位立体扫描功能,同时记录其扫描位置经纬度,并传送至地面站系统,形成全方位立体图片,可放大、旋转查看。机载扫描装置原理以及定位功能分别如图 1、图 2所示。杆塔三维立体扫描图片见图 3。

|
图中:P—扫描坐标系相对于大地坐标系的旋转参数; M—扫描激光束位置(脉冲)相对于起始位置的横向扫描角度; N—扫描激光束位置(脉冲)相对于起始位置的纵向扫描角度; S—扫描仪中心到被测点的距离 图 1 机载扫描装置原理图 |

|
图 2 机载扫描装置定位功能图 |

|
图 3 杆塔三维立体扫描图片 |
在地面站航迹规划时,三维激光扫描系统传输的数据能够提供可靠详细的位置信息(经度、纬度和高度),并能够在无人机开展飞行任务时有效避障,对无人机进行精确定位,可将飞行航线及航迹点精度控制在±20 cm以内。
3.2 无人机飞行控制系统无人机飞行控制系统由无人机、自主飞行控制系统、数据通信模块(Wi-Fi/数传电台)及地面站组成。无人机及自主飞行控制系统关系着无人机飞行的安全性及飞行效果;数据通信模块是连接无人机与地面站的通道;地面站系统运行在具有处理和运算功能的基站上,实现对无人机的实时监视及导航控制[5-6]。无人机飞行控制系统主要采用ARM模块作为机载主控制器,同时带有Wi-Fi无线传输功能,以四旋翼无人机本体为载体实现三维激光扫描数据,通过主控制器与地面站进行通信传输。
地面站系统包括通信模块、数据库模块、电子地图定位模块、航迹规划模块及仪表显示模块等。通信模块实现三维激光扫描数据的接收和上传;数据库模块用于无人机飞行信息存储和无人机航迹规划;电子地图定位模块在接收三维激光扫描数据后,能够计算出无人机的飞行位置信息(经度、纬度和高度),并在电子地图上显示;航迹规划模块是在无人机接受飞行任务后,将预先设置的飞行航迹点按照先后顺序组成1条航线;仪表显示模块用于直观呈现无人机的飞行状态[7-10]。
4 应用及效果分析以某220 kV双回路直线塔为例,在保证最小安全距离10 m的情况下,在地面站系统中建立航拍位置点及航拍轨迹,采用基于三维激光扫描技术的无人机巡检方法开展巡检工作。
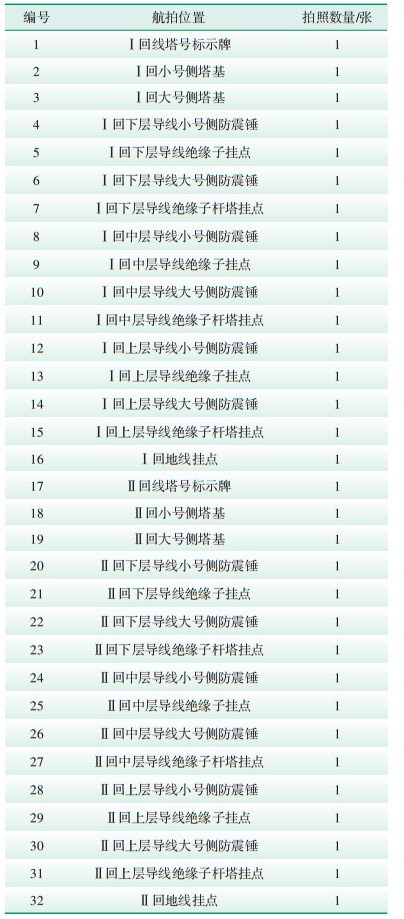
图 4为交流双回路直线塔巡检流程,由图 4可以明确看出多旋翼无人机巡检航拍点及航拍轨迹。表 1为交流双回路直线塔巡检航拍明细。由表 1可知,多旋翼无人机巡检交流双回路直线塔拍摄照片数量为32张。巡检任务完成后,将机载检测设备中的图像导入地面站系统,并按照杆塔对应部位命名图片,再由图像分析子模块对各部位图像进行智能分析,发现缺陷则生成缺陷报告。

|
图 4 交流双回路直线塔巡检流程图 |
| 表 1 交流双回路直线塔巡检航拍明细 |
使用机载激光三维扫描系统对杆塔扫描完毕后,在地面站系统中对对应杆塔的巡检点及巡检路线建立记忆模块,并按照线路名称和塔号进行储存,下次巡检无需扫描定位即可快速开展巡检工作。一旦线路发生故障,将对故障段的杆塔逐一进行扫描,通过比对故障前、后模块数据,快速精确定位故障点,明确故障原因,实现电力无人机巡检的精细化管理。
5 结语本文基于三维激光扫描技术的多旋翼无人机巡检方法,通过激光系统、GPS、空中测量平台、IMU/ INS以及数码相机等技术应用,于多旋翼无人机上搭载三维激光扫描系统,能够实现无人机巡检简单化、精细化管理,提高查找故障点效率,很大程度上优化了多旋翼无人机对输电线路巡检功能,保障了输电线路的安全稳定运行。
| [1] |
曹兵. 无人机技术的五种神奇用途[J]. 世界科学, 2016(5): 24-26. DOI:10.3969/j.issn.1000-0968.2016.05.010 |
| [2] |
郑重. 无人机产业的喜与忧[J]. 今日中国, 2017(6): 64-66. |
| [3] |
詹斌, 唐博, 严伟. 无人机在电力行业的应用前景[J]. 中国新技术新产品, 2017(8): 19-20. DOI:10.3969/j.issn.1673-9957.2017.08.012 |
| [4] |
顾月晓, 赵泽渊. 无人机在输电线路中的应用[J]. 电子技术与软件工程, 2016(21): 95-97. |
| [5] |
吴成富, 王睿, 陈怀民, 等. 无人机导航地面站软件研究[J]. 机械与电子, 2009(4): 7-9. DOI:10.3969/j.issn.1001-2257.2009.04.002 |
| [6] |
欧阳西, 张杰. 多旋翼无人机在输电线路巡检中的运用[J]. 云南电力技术, 2016, 44(增刊): 81. |
| [7] |
钱金菊, 麦晓明, 王柯, 等. 广东电网大型无人直升机电力线路规模化巡检应用及效果[J]. 广东电力, 2016, 29(5): 124-129. DOI:10.3969/j.issn.1007-290X.2016.05.023 |
| [8] |
王锐, 王柯, 徐晓刚, 等. 输电线路无人机巡检地面测控站及运输保障系统设计[J]. 广东电力, 2014, 27(2): 87-92. DOI:10.3969/j.issn.1007-290X.2014.02.019 |
| [9] |
刘志武. 轻型无人机在输电带电作业中的应用[J]. 电力大数据, 2018, 21(11): 83-87. |
| [10] |
加鹤萍. 基于机翼变形的新型电力巡线固定翼无人机的研制[J]. 内蒙古电力技术, 2013, 31(3): 33-37. |