 2018, Vol. 36
2018, Vol. 36 

汽轮机组在启机稳定运行后一般会切换至顺序阀方式下运行,且要求一次调频功能自动投入。在一次调频试验及高压调节阀(以下简称调节阀)异常摆动事件处理过程中发现,许多机组由于调节阀流量特性线性度较差,因此需在顺序阀流量特性函数中设置较大的重叠度,在重叠区域流量-阀位曲线斜率较大时,才能保证机组整体的流量特性曲线近似线性,进而满足机组AGC(Automatic Genera⁃ tion Control,自动发电控制)调节和一次调频响应的需求[1]。但是当机组流量指令刚好使调节阀开启至重叠度区域内且一次调频反复动作时,极有可能引发调节阀短时间内大幅度振荡摆动。这种阀门振荡摆动对机组高压抗燃油系统油压的稳定性影响很大,甚至会引起油管振动,严重时可能迫使机组停机。文献[2]提出在重叠度区内适当降低流量-阀门曲线斜率较大的调节阀的一次调频能力,这样虽然提高了汽轮机组的安全稳定性,但也降低了机组的一次调频能力。为了兼顾机组的一次调频能力和安全稳定性,本文基于等效补偿的思想提出了汽轮机组阀门重叠度区一次调频功能的优化方法,旨在改善阀门的摆动现象、提高机组稳定性的同时,又不降低机组的一次调频能力。
1 一次调频控制原理一次调频功能由DEH(Digital Electric Hydrau⁃ lic Control System,汽轮机数字电液控制系统)侧将频差信号叠加在汽轮机调速汽门指令处的设计方法来实现,以保证一次调频的响应速度。在CCS(Coordinated Control System,协调控制系统)和AGC功能投入时,DCS(Distributed Control System,分布式控制系统)中投入频率校正回路,即当机组在CCS或AGC方式下工作时,由DEH、DCS共同完成一次调频功能[3-8]。目前火电机组普遍采用DEH+ CCS联合调频方式,根据实际转速与额定转速的转速差和按照电网调频要求设置的转速不等率(又称调差率)计算一次调频修正量(简称调频量),由DEH侧高压调节阀率先快速动作响应一次调频,CCS侧闭环修正调频量等于目标值,完成一次调频持续响应,具体控制原理见图 1,一次调频死区设定为±2 r/min,转速不等率设置为5%。

|
图 1 一次调频控制原理 |
在顺序阀方式下将阀门行程划定为振荡区和补偿区:将流量-阀位曲线的斜率较大区段划定为振荡区,特征为机组负荷响应速度慢且调节阀摆动幅度大,不利于机组调节;将流量-阀位曲线斜率较小的区段划定为补偿区,特征为机组负荷响应速度快且调节阀摆动幅度小,利于机组调节。当阀门振荡区附近一次调频动作时,即将响应一次调频而进入振荡区的调节阀不响应一次调频,而将振荡区的调节阀本应承担的一次调频作用分量由处于补偿区的下一个调节阀等效补偿。这样既能保证机组一次调频能力不受影响,又能切实改善机组调节阀在重叠度区的摆动状况。
2.2 优化步骤以目前应用最广泛的火电机组为例,汽机侧高压调节阀共有4个,编号分别为GV1、GV2、GV3和GV4,且顺序阀开启顺序通常为GV1/GV2→GV3→ GV4,一次调频原逻辑见图 2,逻辑优化步骤如下。

|
图 2 调节阀一次调频原逻辑 |
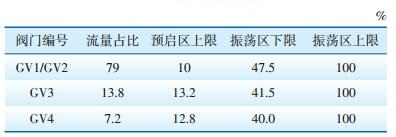
(1)根据汽轮机出厂设置或实际流量测试,预先设置阀门预启行程上限为a,阀门振荡区下限可设置为顺序阀流量特性曲线的拐点b,振荡区上限c设置为满行程。
(2)重叠度区内判断调节阀进入振荡区的逻辑及判断调节阀进入补偿区的逻辑如图 3所示。

|
图 3 阀门振荡区和补偿区判定逻辑 |
(3)GV3不响应一次调频分量(如图 4所示)。

|
图 4 振荡区调节阀一次调频优化逻辑 |
(4)计算GV3补偿分量。通过单阀流量特性曲线的反函数F(y)计算GV3响应一次调频分量后的开度指令下所对应的单阀流量占比与不响应一次调频分量的开度指令所对应的单阀流量占比之差,再乘以GV3的调节阀流量占4个调节阀总流量的比值,得到GV3的补偿分量。其中GV3的流量占比可由汽轮机厂家出厂参数获得或通过实际流量特性试验测得(如图 5所示)。

|
图 5 振荡区调节阀补偿分量计算 |
(5)将GV3的补偿分量等效叠加在GV4的流量指令上,GV4响应一次调频,其逻辑如图 6所示。

|
图 6 补偿区调节阀一次调频优化逻辑 |
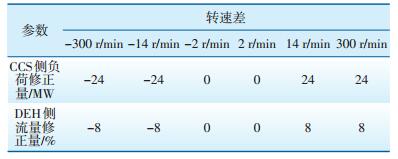
仿真试验采用Matlab仿真平台,仿真参数取自某300 MW火电机组电调系统的流量特性函数及通过高压调节阀流量特性试验测得的调节阀实际特性参数,顺序阀阀序为GV1/GV2→GV3→GV4。调节阀物理参数见表 1。一次调频限幅为±8%,一次调频修正量见表 2,转速差为额定转速减去实际转速。
| 表 1 阀门物理参数 |
| 表 2 一次调频修正量 |
该机组的顺序阀流量特性曲线和单阀流量特性曲线见图 7、图 8所示。

|
图 7 顺序阀流量特性曲线 |

|
图 8 单阀流量特性曲线 |
模拟实际转速2997 r/min和3003 r/min,即超出死区±1 r/min,模拟网频波动±0.05 Hz(考虑模拟量测量误差,该波动为机组电调系统中正常运行时常见的网频波动,具有普遍性)。其中DEH侧流量指令变化±0.667%,CCS侧负荷修正量为±2 MW。根据以上提出的优化策略,处于振荡区的调节阀不响应一次调频动作,其原本应承担的一次调频分量被处于补偿区的调节阀“补偿”承担,故一次调频动作时处于振荡区的调节阀“被补偿”。分别在GV1/GV2和GV3的重叠度区、GV3和GV4的重叠度区,模拟调节阀被补偿前/补偿前(逻辑优化前)和调节阀被补偿后/补偿后(逻辑优化后)一次调频动作时调节阀的摆动幅度变化和一次调频快速响应能力的变化。具体结果如图 9—图 16所示。

|
图 9 转速偏差为+3 r/min时GV3与GV4重叠区调节阀摆动幅度对比 |

|
图 10 转速偏差为-3 r/min时GV1/GV2与GV3重叠区调节阀摆动幅度对比 |

|
图 11 转速偏差为-3 r/min时GV3与GV4重叠区调节阀摆动幅度对比 |

|
图 12 转速偏差为-3 r/min时GV1/GV2与GV3重叠区调节阀摆动幅度对比 |

|
图 13 转速偏差为+3 r/min时GV3与GV4重叠区调频量对比 |

|
图 14 转速偏差为+3 r/min时GV1/GV2与GV3重叠区调频量对比 |

|
图 15 转速偏差为-3 r/min时GV3与GV4重叠区调频量对比 |

|
图 16 转速偏差为-3 r/min时GV1/GV2与GV3重叠区调频量对比 |
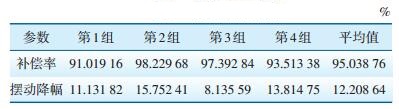
为了表述简洁,将转速偏差为+3 r/min时GV3与GV4重叠度区仿真结果记录为第1组数据;转速偏差为+3 r/min时GV1/GV2与GV3重叠度区仿真结果记录为第2组数据;转速偏差为-3 r/min时GV3与GV4重叠度区仿真结果记录为第3组数据;转速偏差为-3 r/min时GV1/GV2与GV3重叠度区仿真结果记录为第4组数据。同时为了便于分析仿真试验数据,选取补偿率和摆动降幅2个指标,其中补偿率表征优化逻辑前后一次调频快速响应能力的变化,补偿率100%表明逻辑优化前后一次调频能力无变化;摆动降幅表征化逻辑前后一次调频动作时调节阀摆动幅度的降幅,摆动降幅为60%则表征摆动幅度降低至原先的60%,具体计算方法如下。
|
(1) |
式中P1,3—第1组、第3组摆动降幅;
K4、K4 ′ —GV4补偿前、后开度;
K3、K3 ′ —GV3被补偿前、后开度。
|
(2) |
式中Q1,3—第1组、第3组补偿率;
T4、T4 ′ —GV4补偿前、后调频量;
T3、T3 ′ —GV3被补偿前、后调频量。
|
(3) |
式中P2,4—第2组、第4组摆动降幅;
K3、K3 ′ —GV4补偿前、后开度;
K1,2、K1, 2 ′ —GV1/GV2被补偿前、后开度。
|
(4) |
式中Q2,4—第2组、第4组补偿率;
T3、T3 ′ —GV3补偿前、后调频量;
T1,2、T1, 2 ′ —GV1/GV2被补偿前、后调频量。
| 表 3 仿真结果统计 |

|
图 17 各组仿真数据的补偿率和摆动降幅对比 |
通过仿真试验和数据分析可以看出,利用等效补偿的方法对调节阀重叠度区域内一次调频相关逻辑进行优化后,在保证了DEH侧一次调频快速响应的能力的前提下,大大降低了调节阀受一次调频扰动后的摆动幅度,减轻了高压抗燃油系统油管振动及油压不稳的状况,有力保障了机组的安全稳定运行。
| [1] |
戴义平, 赵婷, 高林, 等. 发电机组参与电网一次调频的特性研究[J]. 中国电力, 2006, 39(11): 37-41. DOI:10.3969/j.issn.1004-9649.2006.11.009 |
| [2] |
刘志刚. 汽轮机组重叠度区一次调频功能的优化研究[J]. 自动化博览, 2009, 27(5): 101-104. |
| [3] |
朱大林, 曾孟熊. 汽轮机组调节系统的重叠度与节流损失[J]. 三峡大学学报, 2001, 23(2): 155-158. |
| [4] |
于达仁, 郭钰锋. 电网一次调频能力的在线估计[J]. 中国电机工程学报, 2004, 24(3): 72-76. DOI:10.3321/j.issn:0258-8013.2004.03.014 |
| [5] |
李端超, 陈实, 陈中元, 等. 发电机组一次调频调节效能实时测定及补偿方法[J]. 电力系统自动化, 2004, 28(2): 70-72. DOI:10.3321/j.issn:1000-1026.2004.02.016 |
| [6] |
郑涛, 高伏英. 基于PMU的机组一次调频特性参数在线监测[J]. 电力系统自动化, 2009, 33(11): 57-61. |
| [7] |
陈亮, 陈慧坤. 广东电网发电机组一次调频性能分析[J]. 广东电力, 2008, 21(8): 8-12. DOI:10.3969/j.issn.1007-290X.2008.08.003 |
| [8] |
何常胜, 舒荣, 刘兴福, 等. 水电站机组一次调频与AGC性能优化[J]. 云南电力技术, 2014, 42(1): 106-109. |