 2017, Vol. 35
2017, Vol. 35 

2. 青海省第二测绘院, 西宁 810000
2. 2nd Institute of Surveying & Mapping Qinghai Province, Xining 810000, China
随着低空飞行器制造技术及电子技术的进步,低空遥感系统中的容量存储、安全飞控、精密导航定位、遥测遥控、通信及数据处理等关键技术逐渐成熟,低空遥感技术在我国得到广泛应用,但由于精度不能满足要求,该技术应用于1:500比例尺的却很少[1-2]。
拓普康天狼星无人机于2015年引进中国,通过整台精密测时技术和RTK定位技术来确定每张航片拍摄的准确位置。与传统无人机航拍相比较,拓普康天狼星无人机具有如下特点。
(1)传统无人机航拍时,需要在地面布设像控点,而拓普康天狼星无人机无需布设像控点,即可实现内业数据处理,并且能够获取5 cm以内的高精度数字化地形图。
(2)拓普康天狼星无人机内业数据处理无需做空中三角测量,能够直接生成DEM、DOM等数字化成果,与传统无人机相比,可节省1/3的内业数据处理时间。
(3)拓普康天狼星无人机体积小,操作简单方便,在1:500地形图测绘中飞行高度低,且无需进行航空申请。
(4)在测控人员无法到达的地区(如自然灾害,滑坡地区等)进行测量时,采用拓普康天狼星无人机比传统无人机具有更大优势。
2 拓普康天狼星无人机在测图中的应用 2.1 测区概况以某风电场220 kV升压站测图为例,测区位于内蒙古自治区巴彦淖尔市乌拉特中旗川井苏木东北方向约30 km处。本期风电场工程规模为300 MW,升压站位于风电场的西北角。测量面积为0.25km2。测区北侧为乡村公路,交通条件便捷,测区平均高程约1285 m, 比高约10 m, 地形以平原为主,地势起伏平缓。植被主要为草地,通视条件良好。
2.2 外业航飞本次航测任务主要由拓普康天狼星无人机来完成,测区飞行架次为1架次(如图 1),航高为113 m, 航向重叠度为65%~75%,旁向重叠度为60%,地面采样距离为3 cm。

|
图 1 飞行架次图 |
为检验航测精度,在测区范围内布设10个检查点(C01—C10),每个检查点布设靶标(如图 2),采用GPS-RTK方法测量检查点的坐标和高程。

|
图 2 靶标样图 |
外业航飞结束后,将无人机内存卡取出,插入电脑读取内存信息,在MAVinci中进行相应设置,匹配航片,并选取当地投影坐标系,输入基站控制点坐标,将处理完成后的内业数据导出至单机软件Photo Scan。
2.3 内业数据处理(1)检查航片是否覆盖全部测区范围,是否存在漏片。
(2)设置数据处理精度(高、中、低),是否需要点云和瓦片数据(倾斜摄影效果的模型)。
(3)在无地面控制点的情况下,一键操作,直接点击无地面控制点处理。在有控制点或者需要手动删除粗差点的情况下,先保存设置,进行数据处理,待处理完成后删除粗差点等错误点,添加标记,输入坐标,查看标记点,筛选照片,将每个标记点移动到相应的位置,优化坐标,再进行数据处理,最后生成DEM、DOM点云等。
本次航飞共获取462张航片,经内业数据处理去掉57张,剩余405张可用。
2.4 质量评定分析 2.4.1 质量评定标准(1)数字地形图成图后应对点状地物、植被密集区等航测困难地区进行重点检查,所检查地物、地形点的平面点位较差和高程较差应满足表 1的规定[3-4]。
| 表 1 检查点的平面点位较差和高程较差表 |

(2)测区地物点对最近野外控制点的图上点位中误差不应大于表 2规定[3-4]。
| 表 2 图上地物点的点位中误差 |

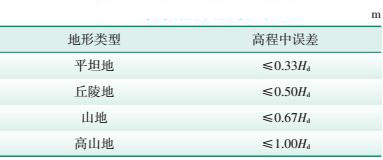
(3)地形图等高线插求点对最近野外控制点的高程中误差不应大于表 3的规定,地形图高程注记点高程中误差不应大于规定的0.7倍[3-4]。
| 表 3 等高线插求点高程中误差 |
检查点的平面点位中误差和高程中误差计算公式为:

|
(1) |
式中mp—检查点中误差,m;
δi—实测点位与图上点位的平面较差/高程较差,m;
n—检查点个数。
该测区航测和工测点位较差和高程较差分别见表 4、表 5所示。根据公式(1)计算可知,检查点平面点位中误差:mp=0.058 m;检查点高程中误差:mp=0.091 m。结合质量评定标准,平面限差为0.4 m(0.80×比例尺),高程限差为0.165 m(0.33Hd=0.33×0.5),二者均满足相关规程的要求。
| 表 4 航测和工测点位较差1) |
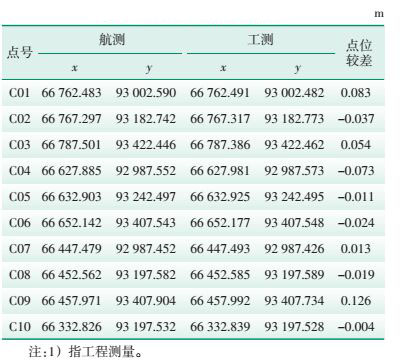
| 表 5 航测和工测高程较差1) |

采用徕卡TS02全站仪极坐标法对测区地形图进行随机散点检测,对测区内的地物及道路的交叉点进行测量,检查平面和高程;对测区内地形点均匀随机跑点,检查同一平面坐标的高程。检查结果如下:平面最大误差5 cm, 高程最大误差7 cm, 满足相关规程要求[5]。
3 结语拓普康天狼星无人机在1:500地形图测绘中的应用,证明了该无人机航测系统完全能够实现大比例尺高精度的地形图制作。该系统突破了传统航空摄影测量的作业模式,无须外业进行像片控制测量。以本工程为例,节省了1 d的外业时间和1/3的内业数据处理时间,与传统无人机比较,优势显著。
| [1] | 李德仁, 李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版), 2014, 36(5): 505–513. |
| [2] | 谢建春, 潘宝玉, 苏国中, 等. 一种提高大比例尺航测精度的方法试验研究[J]. 测绘科学, 2013, 38(5): 1–5. |
| [3] | 电力行业电力规划设计标委会. 火力发电厂工程测量技术规程: DL/T 5001-2014[S]. 北京: 中国电力出版社, 2014. |
| [4] | 国家测绘局. 1: 500、1: 1000、1: 2000地形图质量检验技术规程: CH/T 1020-2010[S]. 北京: 测绘出版社, 2010. |
| [5] | 杨晓明, 沙从术, 郑崇启, 等. 数字测图[M]. 北京: 测绘出版社, 2013: 36-39. |