 2015, Vol. 33
2015, Vol. 33 

2. 北京上庄燃气热电有限公司, 北京 100094
2. Beijing Shangzhuang Gas-fired Thermal Power Co., Ltd., Beijing 100094, China
目前在控制领域的研究中,最引人注目的研究热点当属针对单元机组协调控制系统的被控对象所展开的几乎动用了所有可用的控制策略以提高其性能的研究。其研究范畴涉及多目标优化、不确定干扰、非线性、大迟延、强耦合、多变量等 [1, 2]。在当前的工业过程控制中,具有可靠性高、鲁棒性强和算法简单等优点的常规 PID控制占据着主要位置。在实际应用中,固定参数线性 PID控制器的控制效果不佳,这主要是因为迟延、时变和非线性等缺陷对单元机组协调控制系统的限制。
在优化整定单元机组协调控制系统的控制器参数过程中使用智能算法,既能在较短时间内很好地达成控制目标,又能融合智能算法的优势,组建自整定或自适应的控制系统 [3],从而表现出其特有的优点。近年来,随着模糊、神经网络和专家系统的兴起,人们越来越关注这种新兴的智能控制策略,对其进行研究并应用于单元机组协调控制系统的工程实践中 [4, 5, 6]。综上可知,在协调控制系统的设计过程中,使用变论域模糊自适应 PID控制及模糊自适应 PID控制 2种设计方法,既便于工程中的实际应用,又使设计控制器的过程得以简化。因此,本文将在单元机组的实际控制过程中采用的先进的智能控制技术作为主要研究内容。
1 单元机组协调控制系统的组成单元机组协调控制系统可认为是 1种二级递阶控制系统,系统简化框图如图 1所示。
 |
图1 单元机组协调控制系统简化框图 |
如果在保证可以相对独立地控制主蒸汽温度和燃烧持续稳定的同时维持蒸汽与给水流量、炉膛压力之间的平衡,则可将汽包锅炉单元机组简化为一个具有双输入双输出的被控对象,如图 2所示。
 |
图2 控制对象数学模型 |
二维模糊控制器作为摹仿人工控制的主要工具已被大量应用到实际控制中。将输入变量选定为误差及其变化率,由系统的控制要求和特点得出输出变量,即修正参数。作为参数自适应模糊 PID控制系统的基本构成,参数可调整 PID的主要作用是得出控制信号,而模糊控制器的主要作用是通过模糊规则推理算出控制器参数。为了将较好的动态与静态性能赋予被控对象,必须使 PID控制器参数在不同控制过程中的控制要求得以实现。为此,须首先确认联系和与 PID 3个参数的模糊关系,将和的大小及方向作为系统运行的连续检测指标,利用模糊控制原理在线实时修正这 3个参数。参数自适应模糊 PID控制系统结构如图 3所示。
 |
图3 参数自适应模糊 PID控制系统结构 |
系统的稳态精度、超调量、响应速度和稳定性主要受PID算法的3个参数影响。在系统运行过程中,参数Kp、Ki、Kd针对不同的e及ec均有其各自的自适应调整规则:
(1) 若e值较大,则Kd应取较小值、 Kp应取较大值,Ki值设为0;
(2)若 e值与 ec值大小适中,则 Kd与 Kp应取较小值,Ki值大小适中;
(3)若 e值较小,应使 Ki和 Kp值变大,Kd取值大小与 ec成反比关系。
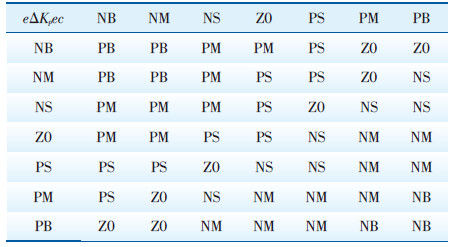
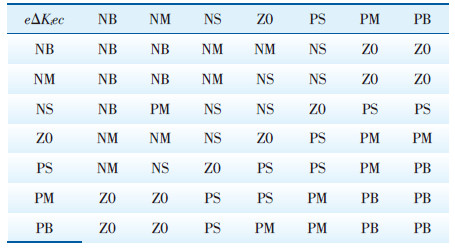
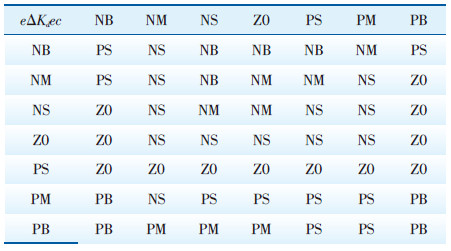
为达成自动整定的目的,在不同时刻通过 Kp、 Ki、Kd之间的协同关系及其调节作用的大小来制定控制规则。在综合考虑其操作经验和作用原理之后,提出模糊整定控制规则,如表 1-表 3所示。
| 表 1 ΔKp的模糊规则 |
| 表 2 ΔKi的模糊规则 |
| 表 3 ΔKd的模糊规则 |
假设仿真传递函数为:

由稳定边界法整定可得: Kp=4.8,Ki=0.5,Kd=1。常规 PID控制的 Simulink仿真框图如图 4所示。模糊自适应 PID控制的 Simulink仿真框图如图 5。由 Matlab得到的常规 PID控制的仿真结果如图 6所示。模糊自适应 PID控制在 Matlab中的仿真结果如图 7所示。
 |
图4 常规 PID控制的 Simulink仿真框图 |
 |
图5 模糊自适应 PID控制仿真框图 |
 |
图6 常规 PID控制仿真结果 |
 |
图7 模糊自适应 PID控制的 Simulink结果 |
由仿真结果可知,在检测分析控制过程中出现的干扰、延迟及未知参数、条件的同时,模糊自适应 PID控制系统可对 PID 3个参数通过模糊推理实现在线自整定的目的。参数模糊自适应 PID控制系统的精确性、适应性及灵活性等显著特点在常规 PID控制系统鲁棒性强、使用方便及原理简单的基础上得到进一步加强。模糊推理参数校正结构及常规 PID控制器是构成该系统的主要结构。为了实现理想的自动控制,具有阶跃响应曲线超调量小、稳态性高、调节精度高及上升速率快等优势的模糊自适应 PID控制器发挥了显著作用。
模糊自适应PID协调控制系统的仿真结构如图 8所示。在 Simulink中,在给予阶跃信号时,功率的响应和主汽压力的响应如图 9、 10所示。
 |
图8 模糊自适应 PID协调控制系统仿真结构图 |
 |
图9 功率的响应输出曲线 |
 |
图10 主汽压力的响应输出曲线 |
实践证明,对实时性及非线性具有较高要求的复杂系统已经成为控制系统的主流,而传统的PID 控制尽管原理简单、简便易用,但难于很好地实现控制目的。这更加突显了模糊控制算法灵活度高、 计算量小和实用性高的优势。由仿真结果可知,在检测分析控制过程中出现的干扰与延迟及未知参数和条件的同时,模糊自适应PID控制系统可对 PID三个参数通过模糊推理达成在线自整定的目的。参数模糊自适应PID控制系统的精确性、适应性及灵活性等显著特点在常规PID控制系统鲁棒性较强、使用方便及原理简单的基础上得到进一步加强。
| [1] | 刘金馄.智能控制[M].北京:电子工业出版社,2009:26- 32. |
| [2] | Wu Zhiqiao, Masaharu, Mizumoto.PID Type Fuzzy Contorller and parameters Adaptive Method[J].Fuzzy Sets and Systems,1996(78):23-35. |
| [3] | 张化光,何希勤,等.模糊自适应控制理论及其应用[M].北 京:北京航空航天大学出版社,2002:105-108. |
| [4] | 陈杰.MATLAB 宝典[M].北京:电子工业出版社,2007: 110-113. |
| [5] | 孙颖凯.参数自校正智能PID控制器[J].现代机械,2000 (4):2-10. |
| [6] | 王一帆,石中锁.自适应模糊PID控制器及其MATLAB仿 真[J].冶金自动化,2007(S):499-502. |